Изобретение относится к способу управления и оценки параметров мобильного агрегата и устройству для его осуществления, может быть использовано в качестве нового принципа исследования и средства познания явлений в системе машина человек среда.
Известен способ управления и оценки параметров мобильного агрегата, включающий получение информации об изменении нагрузки источников и потребителей и управление объектами в виде регулятора, двигателя, гидромуфты, трансмиссии, подвески и навески орудия.
Существенным недостатком известного способа и устройства является недостаточная эффективность принципа исследования, оценки и управления, а также трудность гибкой роботизации и адаптивного регулирования параметров.
Задача настоящего изобретения заключается в устранении этих недостатков, повышении эффективности управления и исследования на основе коренного изменения взглядов на работу управления в теории машин и роботов, расширении тяговой зоны и осувствлении элементов мобильного агрегата.
Это достигается тем, что информацию получают в виде произведения силы на время с последующей оценкой этим параметров работы управления элементов агрегата в режимах источника и потребителя энергии. При изменении нагрузки источник энергии преобразуют в потребителя и подвеской регулируют тяговый диапазон. В подвеске накапливают энергию и преобразуют посредством гидромуфты, при этом накопленную энергию преобразуют в механическую энергию при пуске агрегата путем перевода гидромуфты в режим гидростартера. Цепи управления, линии информационного обеспечения, нагрузки, защиты и коррекции совмещают и согласовывают. Гидромуфта соединена с источниками и потребителями энергии с возможностью работы в режиме гидростартера. Для компенсации релейности, запаздывания и опасности переходных процессов используют упреждение сигнала, процессы возникновения и устранения ошибки управления, сближают до их наложения и синхронизации при минимальном отборе энергии, силы передают при минимальном или нулевом перемещении жидкости, минимизируют энергозатраты на кибернетическую работу, ряд интеллектуальных функций человека выполняют техническими средствами, при очень высокой взаимной чувствительности элементов адаптивно регулируют энергопотоки и обеспечивают энергосбережение, снижают стоимость изготовления и эксплуатации средств комплексной роботизации агрегата.
Произведение силы на время дает кибернетическую работу без физической работы и затрат энергии, что многократно превосходит функции живого и минимизирует физическую работу при адаптивном регулировании параметров: сил тяги, тяжести, нагрузки, мощности и других параметров.
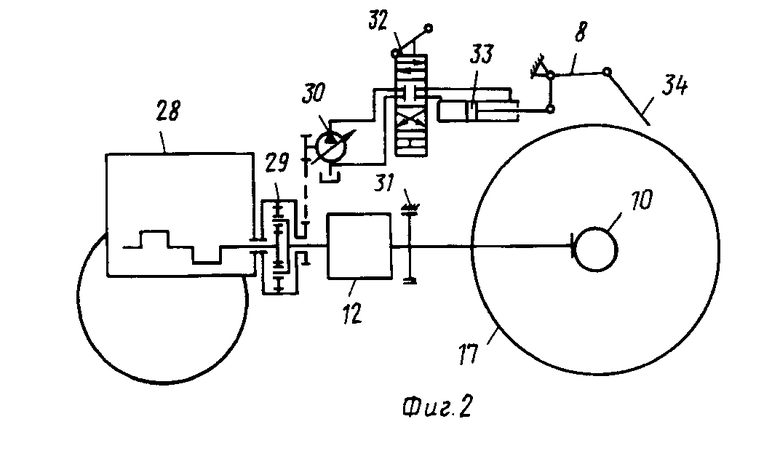
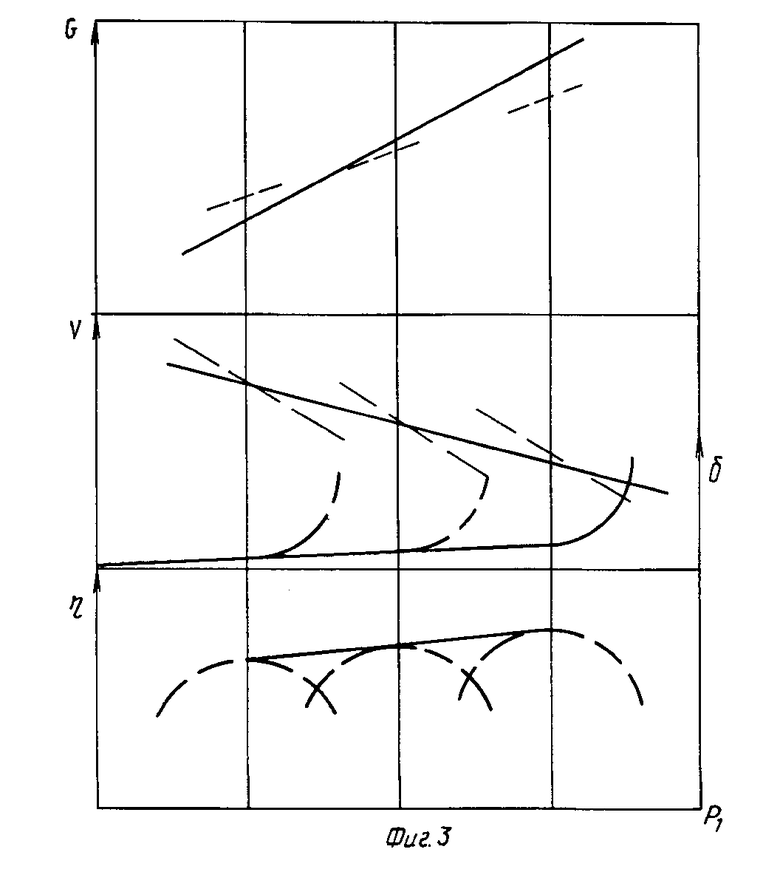
На фиг. 1 изображена схема устройства для реализации способа и оценки с графической интерпретацией работы элементов; на фиг. 2- схема варианта исполнения муфты- гидромашины; на фиг. 3- графическое пояснение сил тяжести G, скорости V буксования б КПД η трактора широкого и регулируемого тягового класса.
Способ управления и оценки реализуется элементами агрегата: насосом 1 изменением подачи топлива G 2 пропорционально нагрузке P мощности двигателя N 4, привода генератора Nг 5 и вентилятора Nв 6, при кратковременной нагрузке по закону 7 механизмом навески 8 и подъемной силой Gо изменения высоты h и сопротивления Pс орудия пропорционально нагрузке, дифференциалом 10 потоков знергии Nт и поворота Nп в зависимости от радиуса R 11, коробкой передач 12 изменением передаточного числа i трансмиссии по силе тяги P и торможения Т 13 тормозами колес 14; в зависимости от знака нагрузки.
Утилизацией тепла газов Ру 15 в теплообменнике 16 колесами 17 и подвеской 18 изменяющей высоту рамы h 19 распределителем 20 и гидромашиной 21, давлением в напорной линии 22 и гидроцилиндре 23 упреждающего сигнала об изменении нагрузки на поршень 24 опоры пружины 25 противодействия сигналу датчика 26 скорости с учетом настройки рычагом 27. Двигатель 28 (фиг. 2) соединен с входом планетарного механизма 29, одно звено с гидромашиной 30, а другое посредством трансмиссии и тормоза 31 о колесами. Силы тяги и тяжести и сопротивления закономерно взаимодействуют через гидрораспределитель 32, гидроцилиндр 33 и тягу 34 с орудием и прицепом. Гидромашина 30 может работать в режиме насоса, тормоза, гидростартера и мотора- -преобразователя энергии. Режим работы задается гидрораспределителем.
Основные элементы мобильного агрегата аналогичны общеизвестным одноименным элементам. Аналогична и их работа. Утилизатор 16 энергии в виде котла преобразует теплоту выхлопных газов в теплоту и давление жидкости для обслуживания потребителей тепловой или напорной энергии.
Режим работы задается человеком и поддерживается получением и использованием информации об изменении внешних условий для регулирования сопротивления, передаточного числа трансмиссии, отбора мощности для привода генератора, вентилятора, если возникает необходимость, стабилизации нагрузки изменением высоты рамы и орудия.
Вертикальное перемещение орудий их же сопротивлением, изменение передаточного числа трансмиссии и расхода топлива взаимосвязаны и составляют процесс регулирования по законам и правилам, приведенным в графической интерпретации характеристик элементов.
Давление в камере подвески 18 зависит от массы подрессоренной части и изменяется аналогично работе грузового аккумулятора: при подаче жидкости поднимается рама, при выпуске и расходе жидкости рама опускается, давление жидкости преобразуется гидромашиной.
Регулятор расхода топлива связан с напорной линией объемной муфты с возможностью регулирования расхода топлива пропорционально давлению жидкости - нагрузке и может упредить информацию и совмещать процессы возникновения и устранения ошибки и улучшить переходные процессы. Здесь линии информационного обеспечения и энергопотоки частично совмещены. При увеличении давления жидкости и нагрузки увеличивается подача топлива и мощность до снижения скорости (частоты вращения вала двигателя) до предела, после чего увеличивается передаточное число, а затем снижается глубина почвообработки - сопротивление орудий. При снижении нагрузки, наоборот, восстанавливается сопротивление, затем снижается передаточное число (повышается скорость), затем снижается расход топлива и мощность. При снижении нагрузки до уровня, при котором изменяется знак нагрузки, переводится в тормозной режим и оборачиваются функции: двигатель становится тормозом (компрессором), тормоз - насос преобразователем избыточной силы в давление жидкости для подачи в накопитель подвеску. Возможно применение иного аккумулятора.
Для расширения тягового класса подъемная сила изменяется (фиг. 3) тяговой или толкающей силой, т.е. силы тяги и сопротивления используются в качестве параметра регулирования подъемной силы силы догрузки ведущих колес и стабилизации КПД, минимизации буксования без измерения приборами. Это изменение тягового класса возможно в пределах силы тяжести орудий и сопротивления почвы, массы прицепов, груза и т.д. следовательно, силы сцепления могут соответствовать требуемой движущей силе. При увеличении силы сцепления в допустимых по прочности ведущих колес и их моста пределах изменяется тяговая сила и тяговый класс трактора. Управление при этом осуществляется без датчиков, приборов измерений и запаздываний. Масса агрегата работает как источник энергии для поворота нулевым радиусом, изменения тяговой силы и торможения, подъема орудий и оси прицепа, передней оси трактора, стабилизации нагрузки, пуска, эластичного привода и информационного обеспечения без двойного преобразования энергии. Взаимовлияние сил тяги сцепления и тяжести на ведущей оси обеспечивает регулирование жесткости подвески по грузу, следящее регулирование давления рабочего материала в подвеске пропорционально нагрузке, не исключая регулирование высоты рамы независимо от нагрузки. Взаимовлияние энергопотоков при ничтожно малой нагрузке подаче (расходе) жидкости в высоком давлении является работой управления (кибернетической).
Расширение тягового класса достигается и тягами связи с прицепом и орудиями так, чтобы один или две оси агрегата поддерживались в оторванном от земли положении.
При гидравлической связи давления от сил тяги и тяжести уравновешиваются: при малой силе тяги сила тяжести на колеса ведущей оси снижается, а при высоком давлении повышается, в каждом случае это минимизирует буксование. Возможно смягчение привода и преобразование колебаний сил тяги в соответствующие изменения сил тяжести.
При реализации способа в качестве параметра оценки и управления принято произведение силы или момента от силы на время работы. Масса подрессоренной части при этом является источником силы, регулятором силы, средством регулирования мощности и сопротивления орудий. В тормозном режиме знак внешнего влияния изменяется и тормозное действие выполняет насос, который в тяговом режиме переходит в режим мотора. Обратимость функций обеспечивается в потоках энергии утилизатора тепла выхлопных газов, силового регулятора, корректора вертикальных нагрузок и синхронного гидропривода. Сопротивления, силы и напряжения почвы выдают регулятору упреждающую информацию. При этом цепи управления и информационного обеспечения, защиты, коррекции, стабилизации нагрузки и энергопотоки совмещают и согласовывают. В качестве параметра регулирования сцепной силы, тягового класса, сопротивления орудия, жесткости подвески и мощности используют тяговую силу.
Значение и знак ведущего момента используют в качестве параметра регулирования сил тяги, тяжести и торможения, так как взаимовлияние этих параметров обеспечивает их саморегулирование: получение и применение упреждающей информации в совмещенных цепях с выдачей необходимой информации. При этом в качестве параметра компенсации релейности и запаздывания, снижения опасности переходных процессов используют упреждение сигнала, а процессы возникновения и устранения ошибки сближают до их наложения и синхронизации. В принципе регулятор и другие элементы становятся и оказываются объектами регулирования и управления. Это увеличило число обратных связей, которыми охвачены все элементы агрегата. Дублирование связей, совмещение и согласование процессов приводит в стабильное состояние, меняет режимы своего функционирования в соответствии с меняющимися окружающими условиями или изменениями взаимодействий и команд человека, а также обратимость функций и изменение структуры элементов.
При использовании объекта повышается эффективность исследования, испытания и оценки системы человек машина среда, неограниченно повышается производительность труда механизатора путем снижения массы трактора, отрицательного влияния большой массы трактора на почву, урожай, ресурс, энергозатраты при реализации большой мощности двигателя, без множества опор, осей, приводов, балласта. Совмещение функций элементов и процессов создает основу коренного изменения взглядов на теорию и обучение.
Использование: сельское хозяйство. Сущность изобретения: при управлении агрегатом информацию получают в виде произведения силы на время с последующей оценкой этим параметром работы управления элементов агрегата в режимах источника и потребителя энергии. При изменении нагрузки источник энергии преобразуют в потребителя и подвеской регулируют тяговый диапазон. В подвеске накапливают энергию и преобразуют посредством гидромуфты, при этом накопленную энергию преобразуют в механическую энергию при пуске агрегата путем перевода гидромуфты в режим гидростартера. Цепи управления, линии информационного обеспечения, нагрузки, защиты и коррекции совмещают и согласовывают. Гидромуфта соединена с источниками и потребителями энергии с возможностью работы в режиме гидростартера. Силы передают при минимальном отборе энергии и нулевом перемещении жидкости, минимизируют энергозатраты на кибернетическую работу, ряд интеллектуальных функций человека выполняют техническими средствами, при очень высокой взаимной чувствительности элементов адаптивно регулируют энергопотоки и обеспечивают энергосбережение и комплексную роботизацию агрегата. Масса агрегата использована в качестве источника энергии для пуска и управления, а также расширения тягового диапазона. 2 с. и 2 з.п.ф-лы, 3 ил.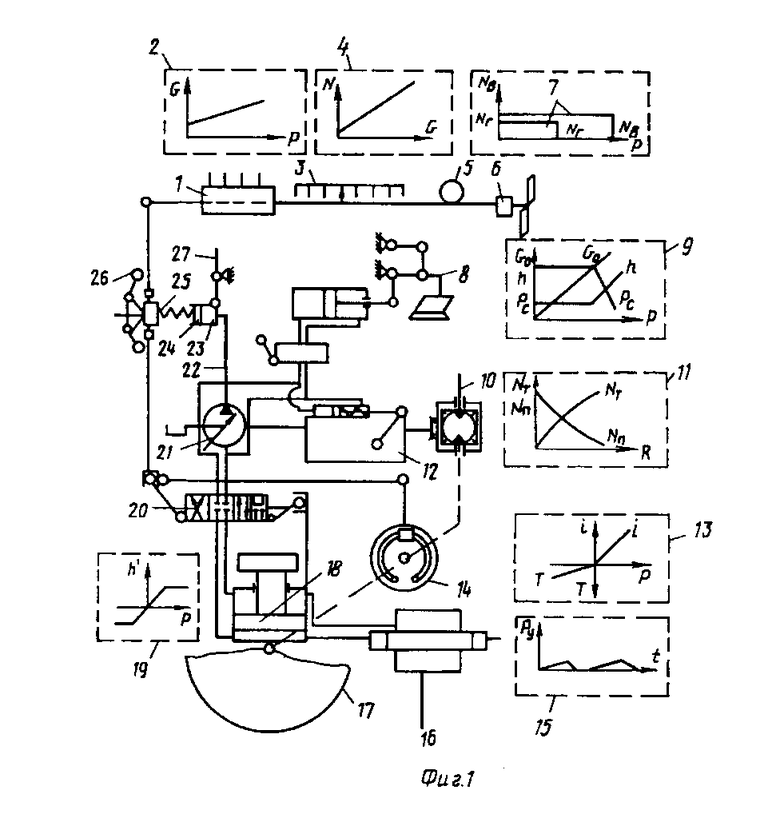
З. Способ по п.1, отличающийся тем, что в подвеске накапливают энергию и преобразуют посредством гидромуфты, при этом накопленную энергию преобразуют в механическую энергию при пуске агрегата путем перевода гидромуфты в режим гидростартера.
| Механизация и электрификация сельского хозяйства, N 1, 1986, с | |||
| Способ смешанной растительной и животной проклейки бумаги | 1922 |
|
SU49A1 |
