Изобретение относится к способу оценки параметров сельхозмашины и может быть использовано для исследования тракторов, сельхозорудий и эффективности системы человек - машина - почва при реальной работе.
Известны способы оценки техники, включающие измерение сил, загрузку, регистрацию и обработку результатов. При реальной работе машины функциональные, информационные, технологические, энергетические и кибернетические элементы и потоки в системе человек - машина - почва имеют входы и выходы, теряющие информацию и энергию, причем потери часто превосходят затраты на полезную работу и управление затрудняется.
Наиболее близким прототипом является способ, предусматривающий измерение нагрузки и скоростей машины и ее колес и определение проскальзывания колеса.
Целью изобретения является повышение информативности и облегчение оценки и управления.
Поставленная цель достигается тем, что включая и выключая энергетические потоки сельхозмашины и ее частей для каждого сочетания этих параметров определяют энергопотоки и мощности сельхозмашины и ее частей, при этом в режиме утилизации энергии толкающей силы коэффициент проскальзывания колеса оценивают от нуля до минус единицы. При энергетической оценке мощность определяют перемножением реактивного момента муфты сцепления и скорости и в качестве датчика информации о моментной нагрузке используют муфту сцепления.
При работе на склоне наклоны колес и навесного орудия снижают пропорционально их размерам по ширине.
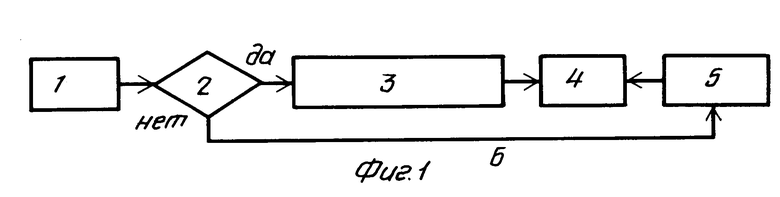
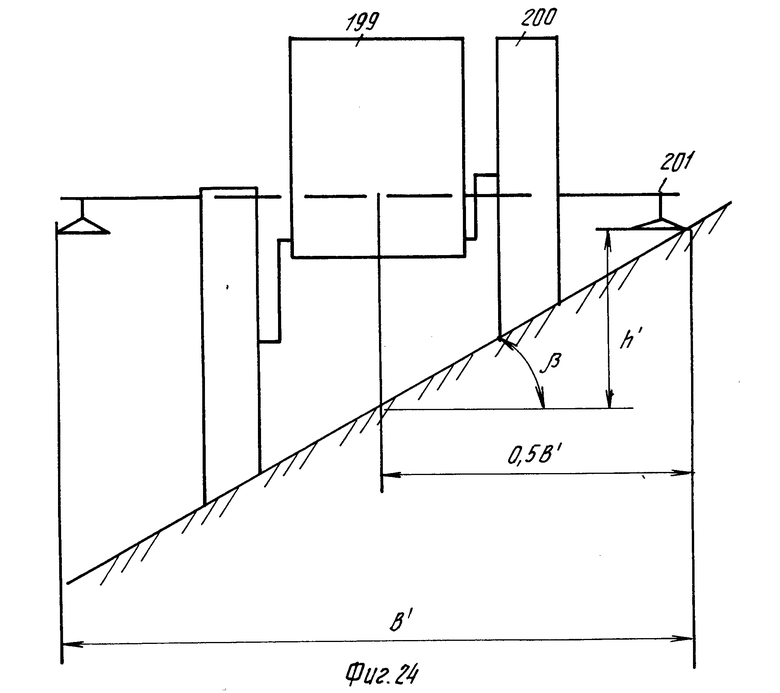
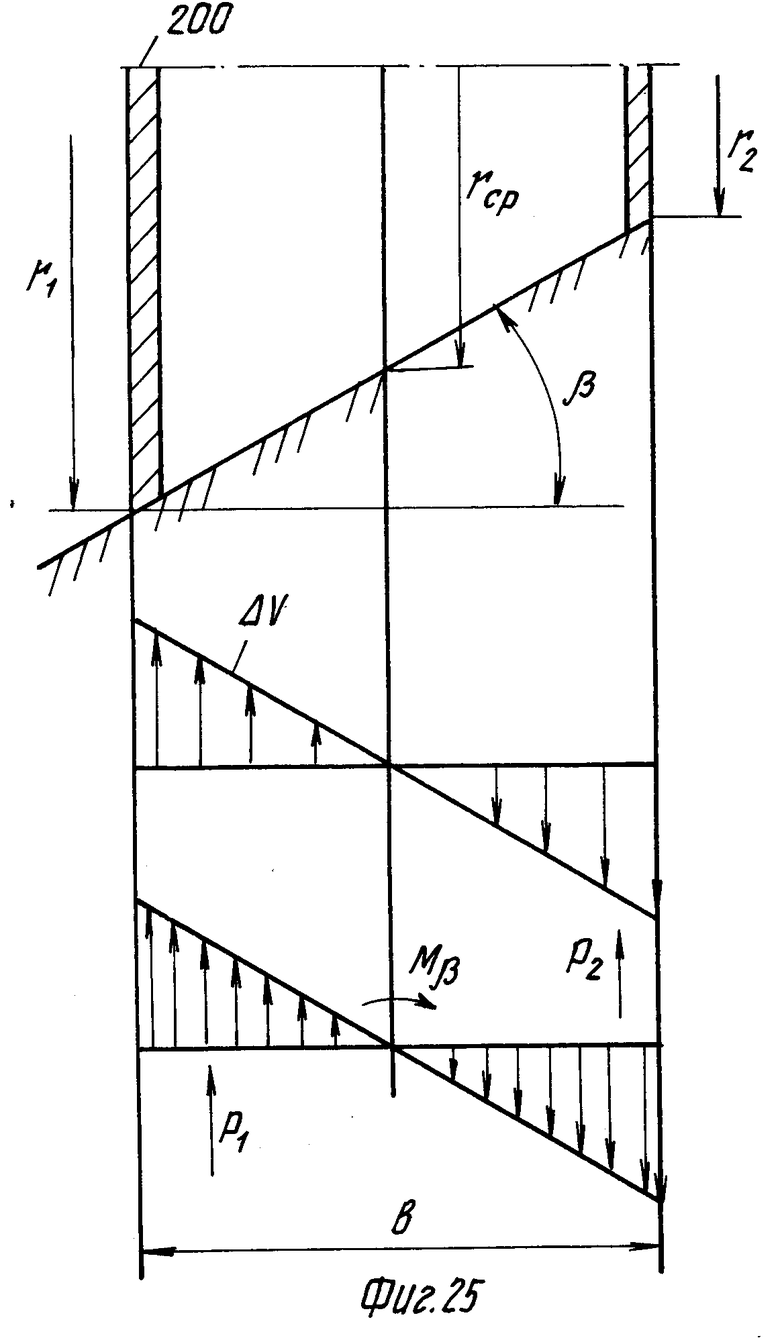
На фиг. 1 изображена схема реализации способа получения информации для оценки энергозатрат при реальной работе агрегата; на фиг. 2 - схема реализации сигнала об изменении нагрузки и скорости относительно их целевых значений М', ω' ; на фиг. 3 - схема оценки и управления рабочими органами; на фиг. 4 - схема оценки режима по буксованию; на фиг. 5 - схема определения закономерности измерения параметров в зависимости от буксования и знака крюковой нагрузки; на фиг. 6 - схема реализации способа устройством управления агрегатом; на фиг. 7 - схема варианта механического соединения тяги с вилкой рычага для реализации связей элементов; на фиг. 8 - схема варианта исполнения связи с коробкой передач и корректорaм вертикальных нагрузок (КВН); на фиг. 9 - схема указателя мощности; на фиг. 10 - графическая интерпретация потоков мощности и показателей энергетической безопасности управления; на фиг. 11 - схема способа обеспечения экологической безопасности управления; на фиг. 12 - схема приоритетности (очередности) формирования траектории и режимов нагрузки и скорости; на фиг. 13 - схема взаимосвязей и взаимовлияний параметров; на фиг. 14 - схема изменения закономерных связей параметров способа в тяговом и тормозном режимах; на фиг. 15 - схема получения информации о скорости и мощности тахогенератором; на фиг. 16 - блок-схема способа использования информации о моменте нагрузки и скорости для управления двигателем (Д), утилизатором (УТ), тормозом (Т) в тормозном режиме и трансмиссией iтр, корректором вертикальных нагрузок (КВН) и тяговым сопротивлением Ркр орудия с учетом значений момента М и частоты П', соответствующих экономичному режиму; на фиг. 17 - схема утилизации энергии путем передачи реактивной силы Рр и мощности Nр на вход вала отбора мощности для привода рабочих органов; на фиг. 18 - схема определения мощности утилизации Nут при вводе энергии толкающей силы Рр через землю Pϕ , Nϕ , передачу Nп утилизируемой мощности Nут на вход привода рабочих органов; на фиг. 19 - закономерности изменения эффективности распределения энергии (Э), коэффициентов сцепления ϕ1 , ϕ2 и силы Pϕ1 , Pϕ2 , мощностней буксирования Nб, качения Nf, поворота Nп, боковой силы Рб и различий коэффициентов сцепления Δ ϕ движителя в зависимости от смещения У плоскости движителя от стенки борозды и ее глубины hб; на фиг. 20 - схема согласования энергопотоков при качении одного колеса по дну борозды; на фиг. 21 - схема формирования программы взаимодействия элементов агрегата при реализации сигнала датчика моментной нагрузки; на фиг. 22 - схема формирования программы взаимодействия и взаимосвязей процессов при реализации сигнала об изменении скорости; на фиг. 23 - графическое пояснение показателей и закономерной связи мощности поворота и разности скоростей бортов с радиусом поворота при формировании криволинейной траектории для оценки программы регулирования скорости; на фиг. 24 - графическая оценка ограничений поворота и подъема орудия на склоне; на рис. 25 - графическая оценка взаимосвязей наклона колеса, радиусов, скоростей и сил при работе на склоне.
Способ осуществляют следующим образом.
Информацию об изменении энергопотоков - составляющих баланса мощности - получают от муфты сцепления - датчика нагрузки, датчика скорости и указателя мощности. Структуру и режимы работы элементов агрегата оценивают на основе согласования и совмещения измерений с учетом вредности и полезности явлений при реальной работе агрегата и его элементов. Мощность 1 (фиг. 1 и 10) определяют с учетом 2 знака момента М нагрузки для определения сопротивлений и мощностей 3 - составляющих баланса мощности: затрат на обслуживание Nо, преодоление сопротивлений трансмиссии Nтр, буксование Nб, качения Nf, инерции Nj, подъема Nα , привода Nпр и ВОМ Nв, привода Nпг и гидропривода Nг, корректирование вертикальных нагрузок Nквн, поворота Nп, циркуляции паразитной мощности Nцт, на крюке Nкр, оценки 4 коэффициентами полезного и вредного действия в тяговом режиме и определение 5 мощности Nт, торможения, перехода 6, пуска Nпу утилизации Nу, компрессии Nк, торможения трансмиссии Тт и колес Тк с оценкой коэффициентами полезной реакции ηI =Np/N, утилизации ηу =Nу/N и вредности 1- η .
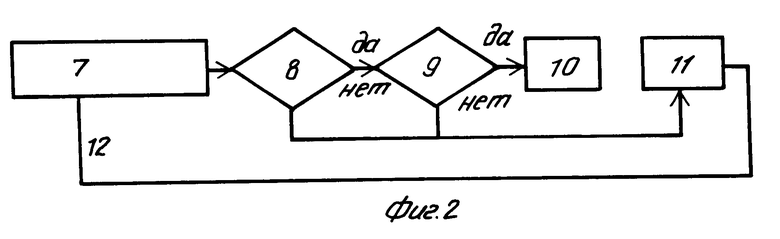
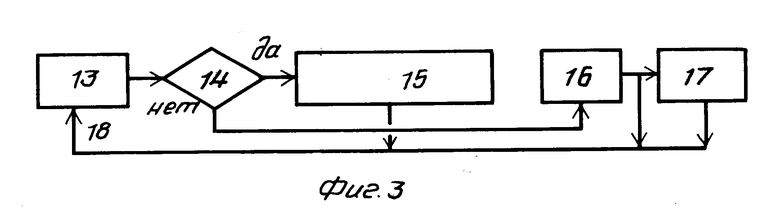
При оценке управления агрегатом в тяговом режиме сигналы 7 (фиг. 2) датчиков и указателя мощности используют после сравнения 8, 9 значений момента М и скорости ω с допустимыми их значениями для стабилизации 10 или коррекции 11 крюковой силы, обеспечивая обратную связь 12. Путем использования 13 (фиг. 3) информация указателя мощности определяют 14 знак момента нагрузки для регулирования 15 передаточного числа трансмиссии iтр, крюковой силы Рк (силового регулирования) при М>0 в тяговом режиме или управления 16 двигателем, генератором и заслонкой с выдачей 17 информации в тормозном режиме с переводом 18 в такой режим без участия человека.
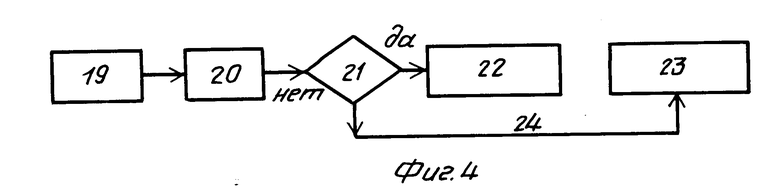
При учете и оценке буксования способ предусматривает измерение скоростей скольжения (буксования) ΔV и движения V 19 (фиг. 4), определение 20 буксования Б, сравнение Б с нулем 21 для определения 22 скорости V=rω - ΔV по радиусу и угловой скорости ω колеса в тяговом режиме или скорости 23 в тормозном режиме с переходом 24 в такой режим, если Б<0, V=rω+ΔV.
При экологической и экономической оценке агрегата закономерности изменения линейных и угловых скоростей колес, буксования, скольжения в зависимости от знака крюковой силы и влияние на почву определяют с учетом буксования 25 (фиг. 5), сравнения 26 с нулем для перехода к поиску 27 закономерности стремления к единице, когда скорости скольжения и движения определяют 28 знаком изменения
ΔV-> rω , V=r ω - Δ V, или остановкой V=0, ΔV=0, если Б=0 в блоке 29, и переход 30 к этому от блока 31 поиска закона Б -> -1, или к блоку 32 определения
ω -> 0, ΔV-> V,Δω -> ω ; Δ ω / ω -> 1.
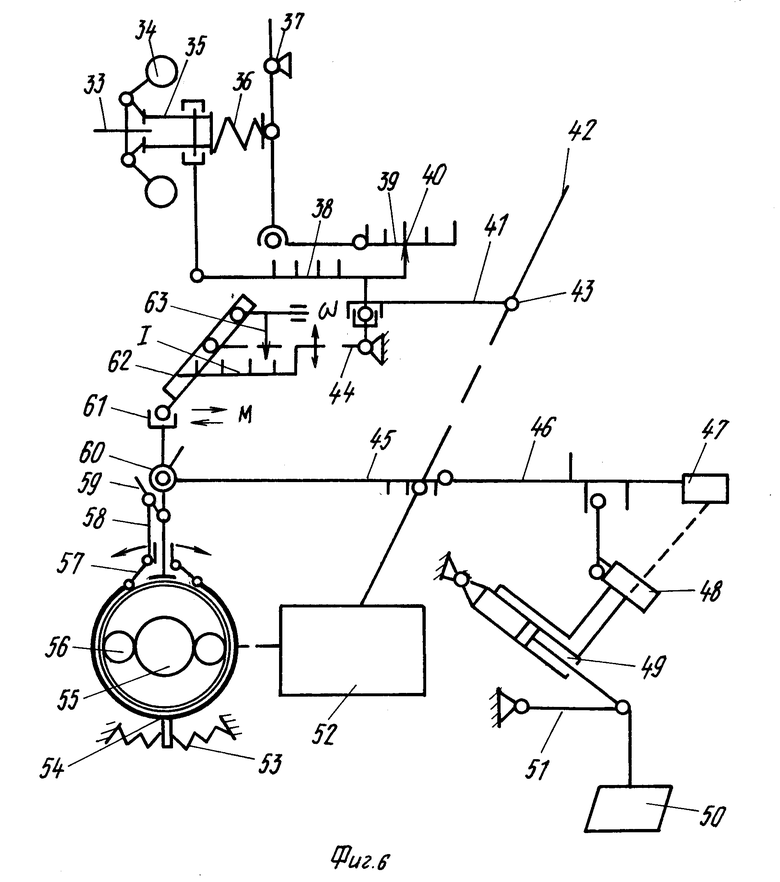
Для реализации этих процессов устройство включает привод 33 (фиг. 6) регулятора двигателя, грузики 34 которого могут дать сигнал; перемещать муфту 35, сжимать пружину 36 с учетом настройки рычагом 37, перемещать рейку 38 насоса относительно шкалы 39 со стрелкой 40 указателя, тягу 41 рычага 42 с шарниром 43, рычагом 44 и регулируемой тягой 45, 46, управлять КВН 47, гидрораспределителем 48 силового регулятора, гидроцилиндром 49 регулирования силы тяги орудия Ркр(глубины, а при отключении рабочего органа 50 поворотом бруса 51 и ширины захвата) и коробкой 52 передач. Пружина 53 связи 54 тормоза трехзвенного планетарного механизма с солнечной шестерней 55 и сателлитами 56, составляют вместе датчик нагрузки - муфту, управляемую тягами 57 и 58 рычагом 59. Шарниры 60 рычагов, вилка 61 связи, подвижная шкала 62 стрелки 63 указателя мощности, движок которого связан с регулятором, могут регулировать передаточное число трансмиссии, ширину захвата, глубину почвообработки и вертикальные нагрузки. При этом сигнал передают и реализуют с или без усилителей, а элементы связи могут быть механическими, электрическими и гидравлическими. Элементы настройки и связи 37, 38, 40, 41, 43, 45, 46, 64, 65, 66, 67, 69, 70, 71 механического типа не требуют преобразователей энергии. Без этих связей способ реализуют ручным управлением с использованием информации 0 мощности 1, положения рейки 38 и движка. Такой вариант реализации способа является альтернативным ручному управлению без информации и оценке на слух и глаз. На шкале 39 указатель дает информацию об отклонении Δ ω от заданной скорости. Реализация этого сигнала коробкой скоростей, КВН и двигателем приводит к устранению отклонения. Поэтому на шкале 39 измеряют ошибку для ручной коррекции. При одном неизменном положении рычага 37 сигнал Δ ω ->> ω характеризует скорость и может быть введен в указатель мощности. При других положениях рычага 37 показания нужно вычислять. Поэтому при оценке рычаг 37 фиксируют в обозначенном месте и на шкале получают готовые значения.
Для измерения мощности без механических связей используют сигнал спидометра. Получить сигнал Δ ω для реализации способа управления можно от генератора постоянного возбуждения отключением регулятора напряжения, а при регулировании тока возбуждения датчиком моментной нагрузки напряжение генератора характеризует мощность, так как магнитный поток эквивалентен нагрузке М, а частота вращения n - скорости вала, т.е.
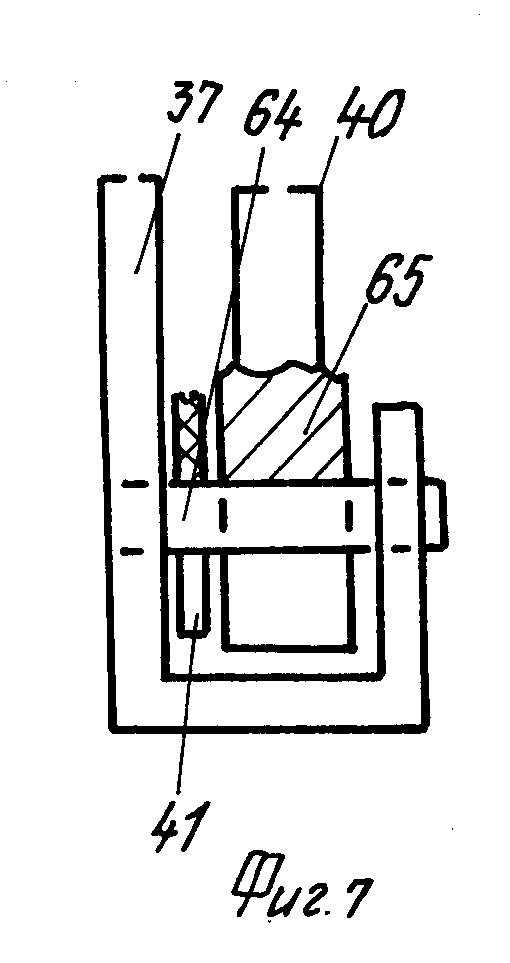
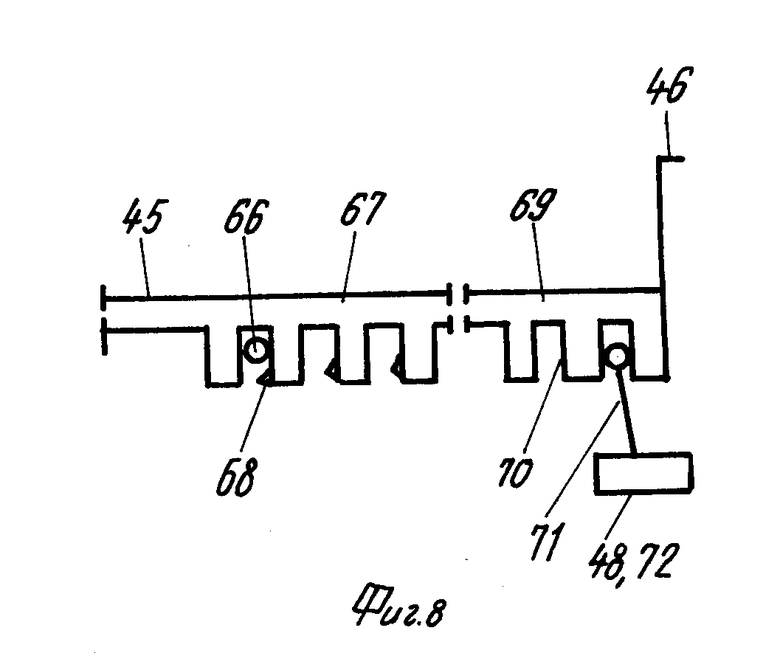
N= c n M, где с - постоянная генератора, характеризующая число пар полюсов, форму и длину обмоток. Балансирная (поворотная) установка генератора допускает оценку потока управления. Электрические сигналы выгодно использовать при большом удалении элементов управления и в микропроцессоре, на вход которого подают сигналы ω , М для перемножения, получения сигнала о значении N на выходе, облегчения хранения информации в памяти и изобажения на экране. Сигналы о нагрузке используют для корректирования ее и сопротивления орудия. Близкое расположение органов управления облегчает применение механической связи, включающей вилку 61, палец 64 и тягу 65 (фиг. 7), палец 66 (фиг. 8) в гребенке 67 с фиксатором 68 в виде пружины и гребенку 69 с зубьями 70 для рычага 71 гидрораспределителя 48 (72). Возможно и иное регулирование длины тяг 41 и 45.
Вариант механического указателя мощности включает рычаг 44, стержень 73 (фиг. 9), направляющую 74 на вилке 61, шкалу 62, движок 75 со стрелкой 63. При работе такой указатель дает информацию в виде произведения момента нагрузки М и скорости ω , т.е. мощности N.
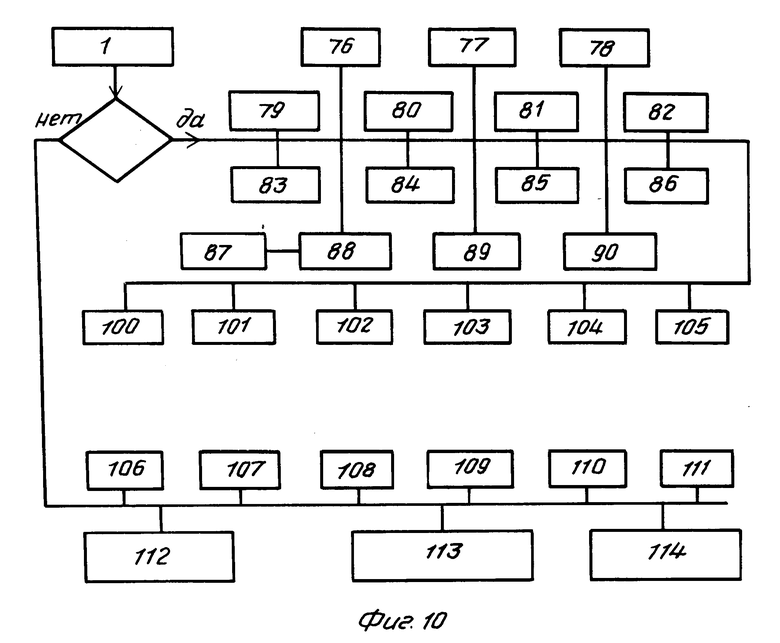
Способ реализуется определением мощности (фиг. 10) и значений энергопотоков при настройке, обслуживании, диагностике, испытании и оценке элементов агрегата и внешних условий. Он предусматривает снятие показателей мощности до и после включения искомого потока (элемента), используя по мере необходимости прямолинейное и криволинейное движение на равнине и подъеме в период разгона и после с и без нагрузки на крюке, ВОМ и гидроприводе, с и без КВН с 2 и 4 ведущими колесами, если это предусмотрено на тракторе, определение оценочных показателей и коэффициентов, коррекцию режимов до оптимального значения при работе.
Затраты на обслуживание трансмиссии определяют 76 по указателю до и после включения в виде разности двух этих показаний No1, No2
No=No1-No2.
Потери мощности в трансмиссии Nтр 77 равны разности показаний указателя при включении трансмиссии Nт1 и отключении Nт2
Nтр=Nт1-Nт2. При этом колеса должны быть подняты.
Мощность, теряемая на буксование, определяют 78 одним из способов
Nб=Nб1-Nб2-Nкр-Nf= ΔVPкр;
Nб=Nкол б; Nкол=N-No-Nтр, где Nб1, Nб2 - показания прибора при движении с нагрузкой и без нее;
Ркр - сила тяги на крюке.
Мощность, затрачиваемую на самопередвижение в конкретных условиях, определяют отключением нагрузки на крюке и ВОМ на равнине после разгона и при прямолинейном движении 79 Nб=Nα = Nj=Nпр=Nп=Nвом=Nп1=Nквн=Nкр=N1=0; Nf=N-No-Nтр.
Мощность, затрачиваемая на преодоление подъема 80, равна Nα = Nα1 - Nαo = ( Nα - NαУ ) / 2 где Nα , Nαo , NαУ - показания на подъеме, равнине и уклоне.
Мощность, теряемая на преодоление сил инерции, определяется 81 как разность показаний при разгоне и после него (при установившемся движении) со скоростью V или на пути S с оценкой коэффициентов сцепления ϕ и эффективности тяги ϕэ или без них
Nj=Nj1-Njo=G ϕ V=G ϕэS б.
Мощность 82, теряемую приводом вала отбора мощности (ВОМ), определяют без нагрузки и включением
Nп.вом=Nв1-Nво.
Мощность, расходуемую через ВОМ 83, определяют как разность измерений с нагрузкой и без нее (выключением его)
Nв=Nвн-Nво.
Мощность, затрачиваемую на поворот 84, определяют как разность показаний при повороте и прямолинейном движении Nпрям
Nп=Nп1-Nпрям.
Мощность, теряемую приводом гидросистемы 85, определяют по показаниям при включении и выключенном гидроприводе без нагрузки
Nпг=Nпг1-Nпг2.
Мощность гидропривода 86 определяют оценкой с Nг1 и без Nго отбора мощности
Nг=Nг1-Nго, где Nг1,Nго - мощности с нагрузкой и без нее.
Мощность, затрачиваемая на корректирование вертикальных нагрузок 87 равна, Nквн=Nк1-Nко, где Nк1,Nко - мощности с и без включения КВН.
Мощность, теряемая на буксование при включении и выключении КВН 88
Nбк'=Nбк1-Nбко.
Потери мощности на ее циркуляцию в трансмиссии 89 (паразитная мощность) определяют при работе с одной Nϕ1 и двумя Nϕ2 ведущими осями с учетом буксования и крюковой нагрузки и приращения ΔNб потерь мощности на буксование от изменения колесной формулы 4К2 на 4К4
Nцт=Nц1-Nц2+ ΔNб.
Мощность на крюке 90 можно определить двумя способами
Nкр=Nк1-Nк2; Nкр=V Pкр, где V,Ркр - скорость и сила на крюке;
Nк1,Nк2 - показания с нагрузкой и без нее с учетом других потоков.
Коэффициенты полезного и вредного действия 100, 101, 102, 103 соответственно определяют по формулам
ηк= Nкр.квн/N; η =Nкр/N-Nвом; ηт =Nкр/N; ηB =1-η , где ηк характеризует эффективность колесной схемы (формулы) и КВН при оптимизации режима работы, здесь ηк - коэффициент полезного действия КВН; η1 ηт - КПД трактора; ηB - КВД коэффициент вредного действия.
Корректируют (К) 104 работу (Р) 105 на основе текущей информации и условий эксплуатации.
Мощность пуска Nпу 106 измеряют в период пуска от буксира.
Мощность утилизации Nу 107 определяют включением и отключением утилизатора Nу1, Nуо:
Nу=Nу1-Nуо.
Мощность торможения 108 соответствует показанию при движении в тормозном режиме с включенным утилизатором
Nт=Nу+Nп.
Мощность компрессии 109 измеряют выключением Nко и включением Nк1 декомпрессионного механизма
Nк=Nк1-Nко.
Реактивная мощность 110 равна крюковой мощности, если знак отрицателен.
Торможение трансмиссией Тт и колесами Тк 111 допускают при ограниченной мощности утилизатора для уничтожения избыточной мощности в нештатных условиях.
Коэффициенты полезного и вредного действия реактивных рабочих органов 112, 113, 114 соответственно равны
η' =Np/N; ηУ =Nу/N;ηB =1- η' .
При работе с реактивными рабочими органами крюковая нагрузка снижается до нуля и изменяет знак. Поэтому КПД η =Nкр/N.
Np -> 0 ; Nкр -> 0 ; η =Nпол/N; η =Апол/А=РполV/N, где Nпол - полезная мощность; Апол - полезная работа; А - вся работа; Рпол - полезная сила. Аналогично
ηB = Nвр/N; Nвр=N-Nпол, где η - КВД в режиме работы с реактивными орудиями; Nв - вредная мощность.
Полезность и вредность оценивают так: η =Апол/А; Апол=PpSp; A=Aпол+Aв= (No+Nтр+Nв+Nf+Nα+Nj+Nпр+Nв+Nпг+Nг+Nп+Nквн+Nцт+Nкp) dt; ]
dt; ]
ηB = 1- η , где Ав - вредная работа, Pp,Sp - сила и путь рабочих органов;
t - время.
Отсюда легко определить полезность и вредность больших масс и затрат, целесообразность снижения числа проходов - пробега и движения рабочих органов относительно трактора и колес по дну борозды при пахоте.
Слежение 115 (фиг. 11) за буксованием, сравнение 116 текущего значения с допустимым, увеличение 117 догрузки ведущих колес и снижение нагрузки, если буксование выше допустимого значения 118 догрузки, если сцепление улучшено переходами 119, 120 при слежении за тяговосцепными условиями путем ввода части выходного сигнала на вход управления с отрицательным знаком улучшает связь машины с почвой.
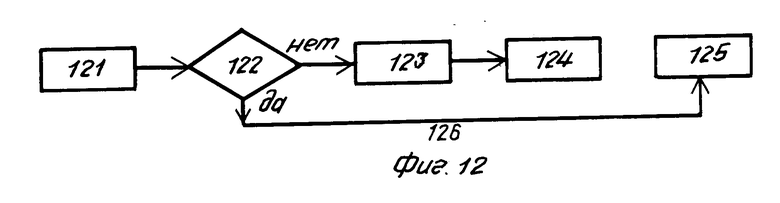
В реальных условиях работы слежение 121 (фиг. 12) за мощностью и скоростью предполагает учет 122 радиуса поворота, формирование траектории 123 движения в первую очередь, а затем режима 124 нагрузки. При оптимизации режима нагрузки регулируют передаточное число трансмиссии, управляют двигателем, корректируют вертикальные нагрузки и сопротивление орудия в блоке, останавливают 125 при нулевом радиусе поворота и определяют переход 126 при настройке на радиус поворота.
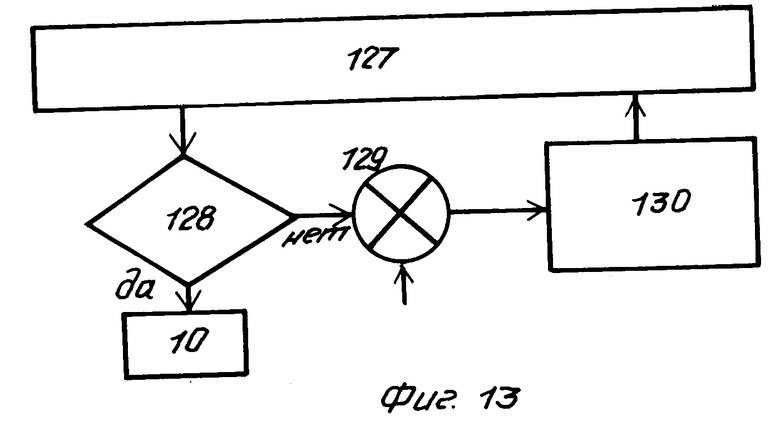
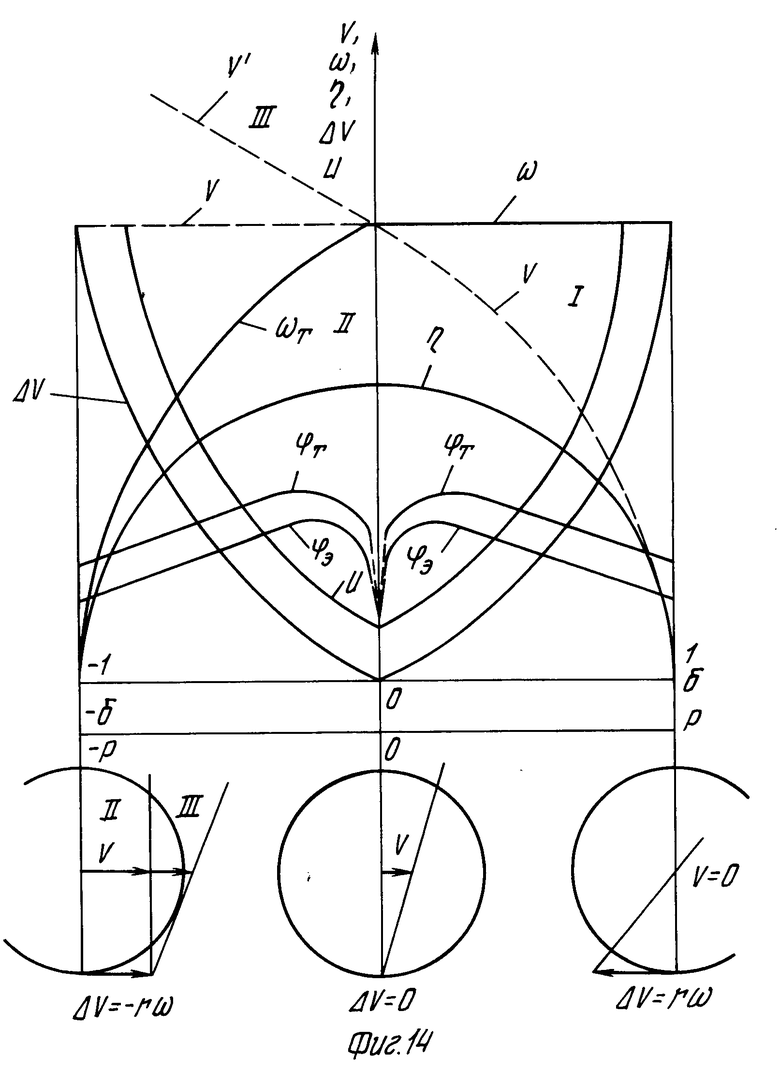
Формирование траектории и кинематическая оценка агрегата при реализации способа вклкючает слежение за углом поворота курсом 127 (фиг. 13), являющимся функцией f разностей Δ сил тяги Р, коэффициентов буксования δ , сцепления ϕ , давлений жидкости в полостях объемного делителя энергии Р', моментов М нагрузки, сил тяжести G, тяги Рк, радиусов r колес, увода δ', путей S, скоростей V, угла поворота орудий αp, угловых скоростей ω , сравнение 128 курсового угла αк к с нулем, сравнение 129 этого сигнала с командой человека и коррекцию (К) 130 курса и режима с учетом результатов целевых значений функций, закономерности изменения которых показаны на фиг. 14, где для скорости V угловой скорости колеса ω , КПД, скольжения (буксования) δ , износа И в зависимости от буксования указаны закономерности изменения в тяговом I, тормозном без скольжения II и с торможением III со скольжением при изменении буксования и скольжения от (-1) до (1), включая нулевое значение δ= 0; Р=0; ΔV=0. КПД и коэффициент эффективности тяги ϕэуказывают на область оптимальной работы, ωт - на снижение угловой скорости колеса до нуля при торможении и остановке.
Человек использует информацию об изменении потоков энергии и минимизирует затраты на буксование, корректирование реакций, согласование работы колес (циркуляцию в трансмиссии паразитной мощности), формирование курса (регулирование сил и скоростей бортов), поворот в конце гона, сокращение холостого хода, после чего замыкает цепи управления двигателем, трансмиссией, механизмом управления рабочей машины и контролирует выполнение технологического процесса. Сигнал о нагрузке и скорости передают исполнительным элементам насосу, коробке передач, силовому регулятору, реализуют путем регулирования топлива, передаточного числа и тягового сопротивления. При этом часть выходного сигнала отрицательным знаком подают на вход управления: снижение приводит к увеличению параметра, увеличению от внешнего влияния, снижению до нормы (заданного режима), в результате чего стабилизируются режимы и параметры.
При буксовании и скольжении независимо от радиуса точка контакта шины с почвой машина движется относительно опорной поверхности назад при буксовании и вперед при скольжении в тормозном режиме (фиг. 14). В тормозном режиме скорость точки контакта с почвой достигает скорости движения оси
ΔV _→ _V; δ=ΔV/V _→ -1. По мере повышения нагрузки в тяговом режиме ΔV _→ V; δ _→ 1. В каждом случае радиус качания изменяется ничтожно мало. Поэтому скорость состоит из скорости чистого качания и скольжения или бускования
Vн= ω r ± Δ V. Знак плюс берется при движении в тормозном режиме, минус - в тяговом. Аналогично путь, пройденный агрегатом, состоит из пути качения и пути скольжения или буксования
Sн=S ± Δ S; S=r ω t;
Δ S= Δ Vt; δ = Δ S/S. Работа и мощность чистого качения и буксования или скольжения соответственно будут
Ап=А±ΔА; Nн=N±ΔN; A=PS;
ΔA= PΔS; N=Prω ; Δ N=P ΔV. Отсюда легко понять потери энергии в тяговом режиме и приращения в тормозном, утилизацию энергии, диапазон изменения нарушений кинематики качения колеса и определить пути оптимизации работы, так как
δ= Δ V/V= Δ S/S= Δ A/A= Δ N/N изменяется точно в пределах единицы или 100% и по знаку Δ A ->> A ; Δ N ->> N .
Приобретенная при торможении мощность равна
Nт=Ртrω =Mт ω =РтV(1-б), где Рт,М - сила и момент торможения;
ω , v - скорости вращения и перемещения оси. Реализуемая утилизатором энергии E=N dt
dt
Когда мощность утилизатора исчерпана, некорректированная утилизатором скорость регулируется тормозами. Это допустимо в случае технологической необходимости. С учетом изменений параметров во времени E=ηr dpт
dpт dω
dω  dt;
dt;  dpт=r
dpт=r

 dG, где G - сила тяжести в контакте колес с почвой. Если мощность торможения близка к мощности, теряемой на скольжение колес, эффективность утилизации близка к нулю. В этом случае износ и снижение ресурса сравнимы с классической схемой, но технологический процесс выполняется агрегатом малой металлоемкости.
dG, где G - сила тяжести в контакте колес с почвой. Если мощность торможения близка к мощности, теряемой на скольжение колес, эффективность утилизации близка к нулю. В этом случае износ и снижение ресурса сравнимы с классической схемой, но технологический процесс выполняется агрегатом малой металлоемкости.
Повышение силы тяжести для снижения скольжения колес требует учета затрат на перевозку дополнительной массы, что создает необходимость в использовании реакций почвы в вертикальной плоскости, т.е. догрузки ведущих колес силой тяжести почвы при обработке. Удельный расход топлива
g= 1000 Gт/Nкp= G 1000/Ркр V при Pкр _→ 0; V _→ 0, g _→ ∞ не имеет смысла. При приобретении энергии g=Gт1000/Ркр.V;Pкр _→ _P . Подставляя значения параметров в режиме утилизации, можно найти экономию топлива Gт=g Ркр· V/1000= Nтg η / 1000, кг. Расход топлива определяется известным способом, например, по ходу рейки.
. Подставляя значения параметров в режиме утилизации, можно найти экономию топлива Gт=g Ркр· V/1000= Nтg η / 1000, кг. Расход топлива определяется известным способом, например, по ходу рейки.
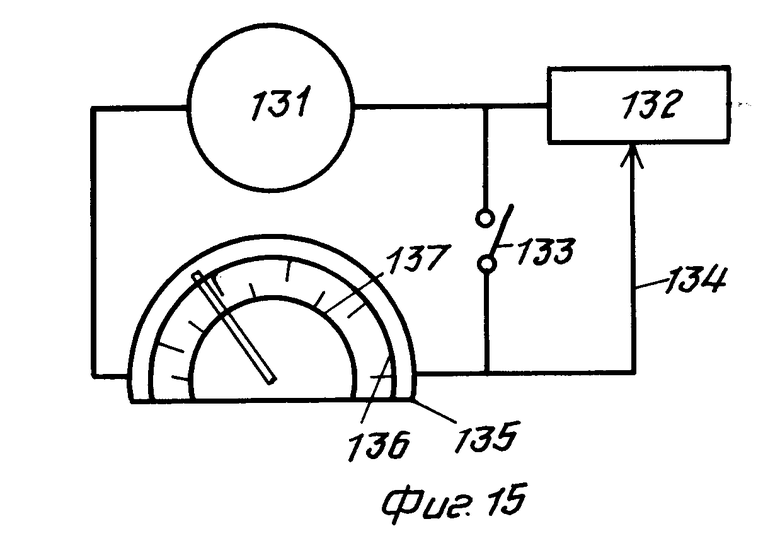
Электрический вариант исполнения датчика мощности - спидометра тахогенератора 131 (фиг. 15) с потенциометром 132 в цепи 134 с выключателем 133 и указателя 135 дает информацию о мощности
N= ECM; E=Cn Φ ; N=CnM, где Е - напряжение тахогенератора; n - частота вращения; М - электрический сигнал потенциометра датчика момента нагрузки; Φ - постоянный магнитный поток. Простой вариант датчика мощности выполняют в виде тахогенератора-спидометра 131, обмотка возбуждения которого соединена с потенциометром 132. В этом случае N=E=Cn Φ . Здесь магнитный поток пропорционален моменту нагрузки.
Измерение мощности и крутящего момента без снятия двигателя с агрегата и без установки на стенд возможно пропусканием сигнала тахогенератора 131 (фиг. 15) через потенциометр 132 датчика момента нагрузки. К рычагу датчика момента нагрузки присоединяют потенциометр в цепи тахогенератора. Это снижает напряжение пропорционально произведению крутящего момента на скорость, т. е. мощности. При тарировке следует учесть возможность получения мощности на шкале крутящего момента, если напряжение удовлетворяет условию n=1000/к, где к - коэффициент длины рычага. Для получения сигнала в виде скорости потенциометр 132 выключают выключателем 133 в цепи 134 проводов указателя 135 с шкалами мощности 136 и скорости 137 или частоты вращения.
После оценки информацию используют для управления и контроля.
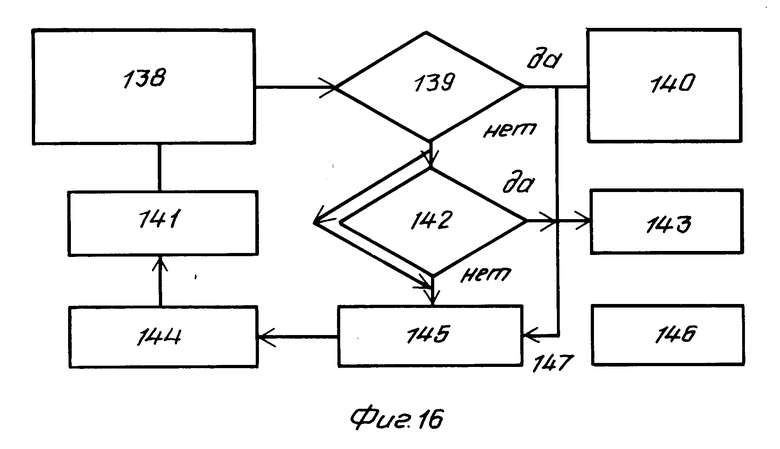
Способ управления по моменту нагрузки (фиг. 16) включает слежение 138, сравнение 139 момента с нулем, управление 140 двигателем (Д), утилизатором (У) 143 и тормозом (Т) 146 по сигналу ДА или переход при НЕТ к сравнению 142 частоты П с целевым значением, управление 147 двигателем 140, утилизатором, тормозом 146 и трансмиссией 145, КВН 144 и сопротивлением орудия 141 до устранения сигнала, после чего вводят часть выходного сигнала обратным знаком на вход, продолжают эти процессы, стабилизируют режимы работы, оптимизируют работу.
Баланс мощности агрегата в тяговом и тормозном режимах описывают уравнением
N= No+Nтр+Nб+Nf± Nα± Nj+Nпр+Nвом+Nп+Nпг++Nг+Nквн+Nцт+Nкр; N=Nтр+Nк+Nу. Мощность поворота равна произведению силы сопротивления прямолинейному движению на скорость точки приложения этой силы при повороте
Nп=Р V.
Мощности гидроприводов, КВН определяют включением и выключением их. Аналогично определяют и другие составляющие.
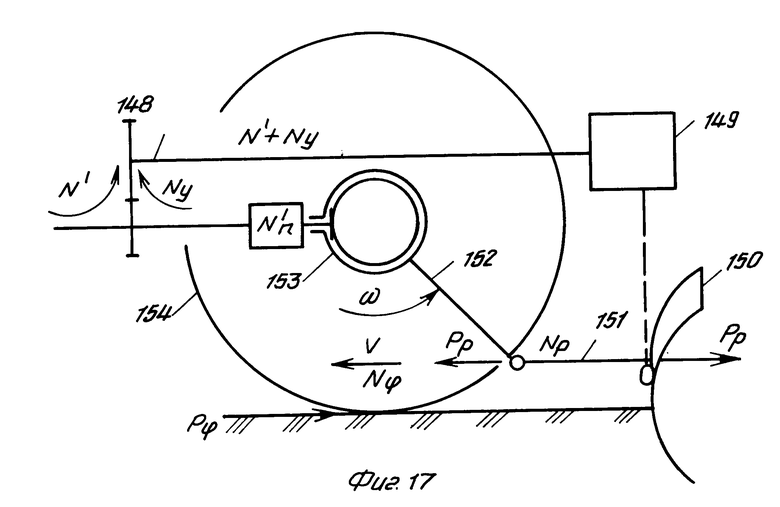
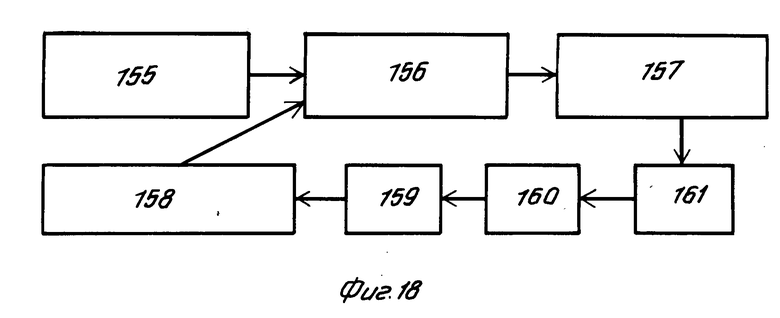
При работе с реактивным орудием вал отбора мощности 148 (фиг. 17), привод 149 рабочего органа 150, установленного на механизме навески 151 рамы 152, передача 153 колес 154 составляют замкнутый контур подачи энергии Nр толкающей силы Рр с вычетом потерь Nϕ взаимодействия с почвой силой G ϕ , пропорциональной силе G тяжести коэффициенту ϕ сцепления, и скоростью движения V и вращения ω , ω =v/r. В этом случае мощность двигателя с вычетом потерь 155 (фиг. 18) подают валу отбора мощности 156 Nв=Ni+Nу и расходуют 157 на получение N, выполнение технологического процесса Nт.п и преодоления сопротивления Nio орудия. Полученную мощность Nр 161 передают механизмом навески 151, рамой 152 и колесом 154 почве, от которой с потерей мощности Nϕ 160 в контакте с колесом и в передаче 159 утилизируют 158, т.е. подают валу отбора мощности, и это повторяют.
Мощность на крюке в тяговом режиме PкрV, в тормозном PpV от реактивной силы Pp (фиг. 17 и 18) подают на вход отбора мощности.
Утилизированную мощность Nу и мощность двигателя на входе вала отбора мощности с вычетом потерь в приводах расходуют рабочие органы, получая еще реактивную мощность Nр 161, выполняя технологический процесс N преодолевая сопротивление орудия Nio и т.д., процессы повторяются.
преодолевая сопротивление орудия Nio и т.д., процессы повторяются.
При постоянной скорости изменение момента нагрузки характеризует изменение мощности, а при определенном радиусе характеризует еще и изменение сил: М=Мо+Мтр+Мf+М8+Mα +Мj+Mα+ Мпр+Мв+Мпо+Мпг+Мг+ Мквн+Мцт±Мкрi,
Р=Ро+Ртр+Рf+Pα +Рj+Рв+Рп+Рпг+Рг+Рквн+Рц±Ркр=Рт+Рк+Рут.
Приписать отрицательный знак можно на уклоне, при торможении и работе с реактивными орудиями. Здесь моменты и силы имеют индексы, аналогичные индексам при составляющих баланса мощности.
В масштабе скорости и радиуса поворота баланс мощности в виде балансов крутящихся моментов и сил облегчает оценку машины.
Знакомерные взаимосвязи сил и скоростей нарушаются в контакте шин с почвой, возникают нереализованные моменты от сил Мб,Рб приращения скоростей Δ V и поток мощности буксования.
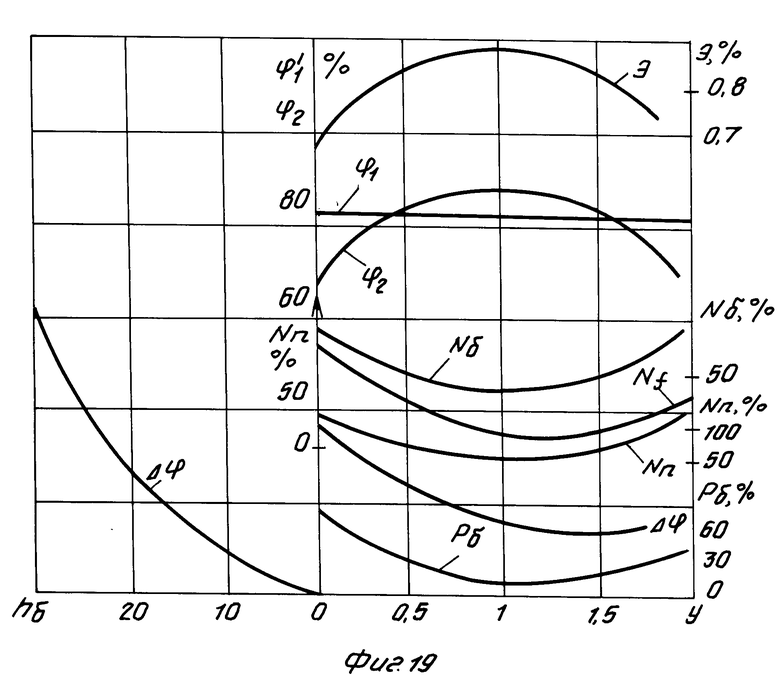
Энергетические, экономические и экологические показатели оценивают при качении движителей одного борта по дну борозды, причем смещение У (фиг. 19) плоскости движителя от стенки борозды, в единицах ширины захвата одного корпуса плуга, показывают на возможность оптимизации траектории с учетом энергетической оценки при смещении на одну ширину захвата корпуса, при котором эффективность распределения энергии (Э), коэффициенты сцепления ϕ2 по сравнению с ϕ1 полевого движителя достигают максимума, а затраты мощности на буксование Nб, самопередвижение Nf, подвороты Nп при формировании траектории, боковая сила Рб и приращение коэффициента сцепления Δ ϕ достигают максимума. Пропорционально глубине борозды смещению от стенки коэффициент сцепления изменяется.
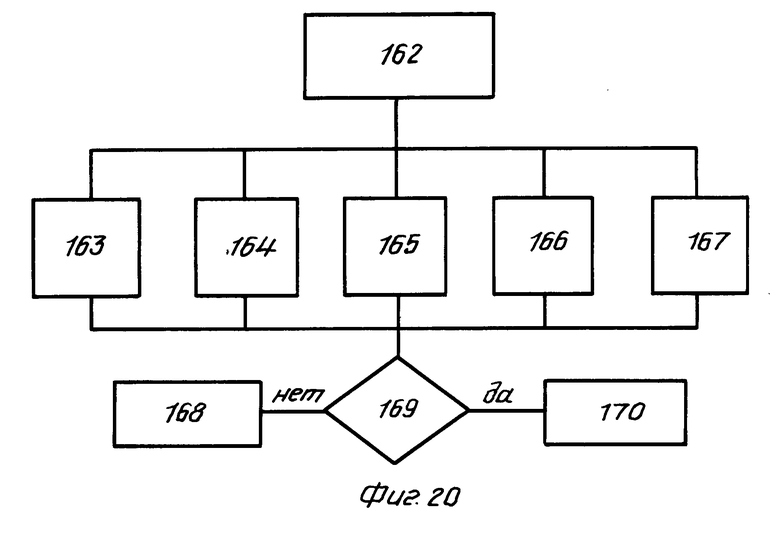
Эффективность оценивают путем использования информации ходовой части ИХЧ 162 (фиг. 20) при формировании 163 курса и траектории путем контроля угла курса, радиуса поворота и разности скоростей Δ V бортов, положения 164 разности спорных реакций Δ G и крена Δ β , разности мощностей Δ N 165 к бортам и касательных напряжений Δ τпочвы 166, напряжений почвы и крюковой силы Ркр в тяговом режиме и скорости 167 при наличии реактивной силы Рр утилизации (У) и торможении (Т) агрегата, коррекции 168 этих параметров по сигналу блока 169 сравнения и проверки согласованности процессов при нормальном (Н) 170 функционировании, если энергопотоки согласованы.
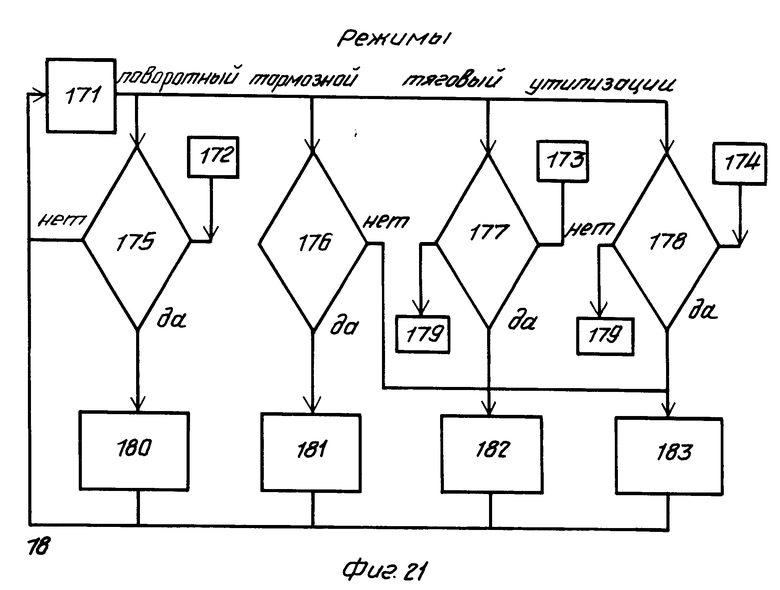
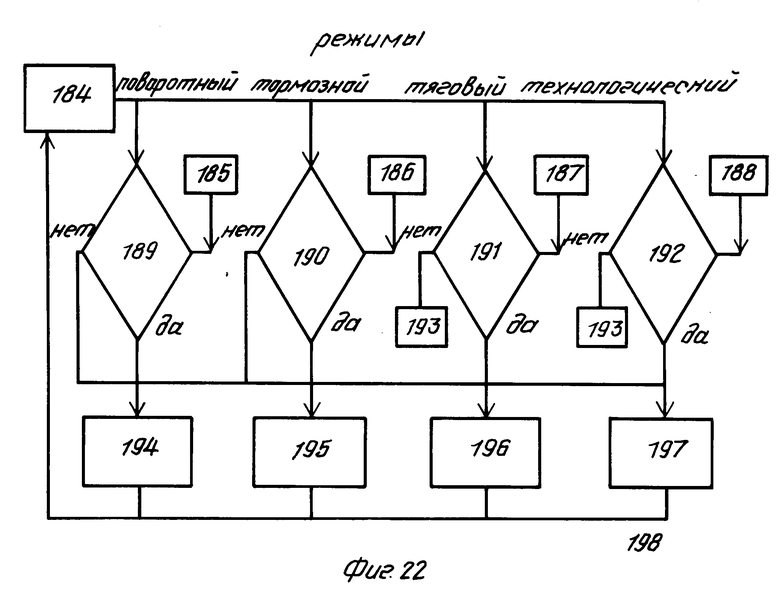
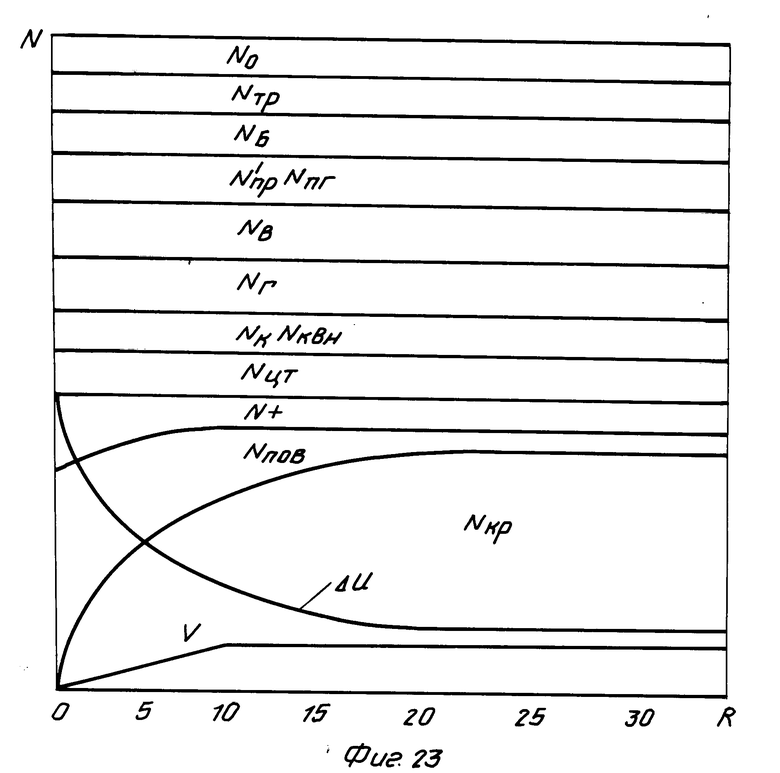
С учетом требований различных технологических принципов модель формирования нагрузочного режима агрегата (фиг. 21) основана на учете нагрузки 171, радиуса R поворота 172 и моментов нагружения 173 и утилизации 174, радиуса поворота 175, знака нагрузки 176 и значений моментов 177, 178 и их соответствие сигналам Н 179. При нулевом радиусе поворота формирователь на выходе ДА имеет сигнал управления тормозом 180 трансмиссии. Иное значение радиуса выдает на выходе НЕТ сигнал для управления с учетом момента нагрузки 171 и его сравнения в блоках 176-178 с оптимальным значением и знаком. На выходе ДА этих блоков возникает сигнал для управления колесным тормозом 181, коробкой скоростей 182 и двигателем 183 по следующему принципу с обратной связью 18 для ввода выходного сигнала обратным знаком на вход управления. С выходов НЕТ блоков 177 и 178 в сигнализатор подает информацию о нормальном функционировании 179. Возможна работа и без такого сигнала, как это показано применительно к тормозам. Ошибки управления по моменту нагрузки накапливаются и формируют сигнал об изменении скорости 184 (фиг. 22). При управлении по сигналу об изменении скорости учитывают радиус 185, критическую скорость Vк 186, оптимальную скорость Vо 187, технологическую скорость Vт 188, формируют сигналы в блоках 189-192 сравнения и управления тормозами 194 и 195 коробкой передач 196, двигателем 197 по следующему принципу с обратной отрицательной связью 198 для контроля и управления в поворотном, тяговом и технологическом режимах с выдачей информации о нормальном функционировании 193 с выходов НЕТ или непрерывной коррекции при знакопеременной нагрузке. С выхода ДА блока 189 сигнал обеспечивает торможение трансмиссии до полного поворота на желаемый угол. С выхода НЕТ сигнал подают для управления двигателем, коробкой передач и тормозами. Аналогично с выхода НЕТ управляют блоком 190. Изменение составляющих баланса мощности в зависимости от радиуса в графической интерпретации дано на фиг. 23.
На склоне высоту и ширину захвата орудия оценивают и ограничивают (фиг. 24)
h' ≥ 0,5 B' tg β , B' ≅ 2 h' / tg β . При формировании траектории движения агрегата связь поворота рамы 199, колес 200 и орудий 201, взаимовлияние углов наклона β и поворота αкколеса-датчика (фиг. 25) оцениваются и характеризуются равенствами:
tg αк = tg β / π ; tg αк = π ( r1 - r2 ) / b
tg β = ( r1 - r2 ) b .
Оценка работы движителя предусматривает снижение влияния различия радиусов качения по ширине шины
Δr = r1 - r2 = b tg β = π b tg αк ,
Δ V' = 2 π Δr , где r1,r2 - радиусы качения слоев, отстоящих от боковин на 0,3b; b - ширина профиля шины; ΔV' - изменение скорости по ширине, так как число колес одного борта ограничивают суммарной шириной опоры
b ≅ Δ r / tg β .
Изменение радиуса качения по ширине шины относительно средней ее плоскости и угла наклона (крутизны склона) оценивают и ограничивают соответственно значениями Δ r = 0,5 b tg β ; β = arctg r Δr / b.
При движении на склоне и при криволинейном движении крюковая мощность
Nкр=Ркр V=Pp Vi V=(V1+V2)/2.
При повороте нулевым радиусом V1=-V2; Nкр=0.
Мощность двигателя и каждого цилиндра в отдельности проверяют поочередным их отключением, оценивают неравномерность подачи топлива, момента подачи топлива, фаз газораспределителя, нарушений герметичности камер сгорания, дает представление о техническом состоянии.
При изменении работы расширения функциональных возможностей и изменения технологии повторяют энергетическую оценку.
Действительная скорость колеса при
rк = 0; c= Δ r/r=-r/r=-1; Vg=r ω (1+c)=0. Очевидно, что при полном скольжении колеса скорость теряет связь с радиусом и скоростью вращения, так как превращается в полозок. Ввиду того что коэффициент буксования изменяется в пределах 0-1, а скольжение - в пределах 0 (-1), единица одинаково оценивает и характеризует полное нарушение кинематики качения. При остановке оси в первом случае и движении без вращения колеса во втором полностью теряется энергия двигателя и утилизатора. При этом скольжение закономерно не связано с радиусом колеса. Скольжение колеса можно снизить или исключить регулированием сопротивления утилизатора и известными приемами улучшения сцепления с почвой и изменения касательной силы.
Толкающая сила ограничивается возможностями колес и утилизатора так же, как тяговая сила определяется по двигателю и сцеплению. Толкающая сила по сцеплению колес и утилизатору соответственно будет Рт= ϕтG; Pут=Мут ηУТ iтр/rк. По сравнению с буксованием, равномерно изнашивающим шину, скольжение ускоряет местный износ в 2 π r/l1 раз, где l1 - длина площади контакта шины с почвой. Поэтому мощность утилизатора энергии толкающей силы ограничена
Nу= P1Q; P=Pут η /F, где Р1 - давление рабочего материала; Q1 - подача; F - площадь поршня утилизатора; η- КПД. Поскольку в цепи циркуляции утилизируемой мощности энергии теряется пропорционально нагрузке, целесообразно оценить, скорость движения. Диапазон регулирования мощности утилизатора, скорости и толкающей силы оценивают с учетом допустимого скольжения и коэффициента эффективности утилизации. При отсутствии утилизатора толкающая сила, равная силе сопротивления движению, исключает буксование и скольжение.
КПД колеса в режиме утилизации
ηку = ηfк ˙ ηт = ηfк / ( 1 - C ) , где ηfк - КПД качения; ηт - КПД торможения при утилизации энергии.
Общий КПД η =  ;
;
Nкр= ±PV/1000, где N' - мощность привода рабочих органов; N - мощность двигателя. Знак мощности определяется знаком силы. Очевидно, что тяговая сила снижает КПД, а толкающая повышает. При этом мощность двигателя может быть дополнена мощностью утилизатора. Это снижает расход топлива. Толкающая сила рабочих органов облегчает движение по контуру поля без нарушения агротехнических требований. Это объясняется тем, что облегчается оборот пласта вверх толкающей силой тяжести на уклоне и движение вверх и поперек склона - силой почвы. Это снижает чувствительность обработки почвы к направлению движения, обеспечивает свободу выбора траектории и движение вверх для обработки узких полосок на пересеченной местности.
Накопление энергии на уклоне и расход на подъеме стабилизирует нагрузку двигателя, если мощность утилизатора
Nу=V η Gsin β /1000. При движении агрегата по горизонтали склона дополнительное сопротивление (Gpsin β ) движению и составляющая от силы тяжести Gр второго рабочего органа обеспечивают динамическое равновесие и стабилизируют движение. Аналогично оценивается и уравновешивается влияние почвы на рабочие органы правого и левого боров, когда возникает в этом необходимость, использование рабочего органа для компенсации боковой силы, стабилизации курса и торможения. Поток мощности к ходовой части на подъеме и уклоне будет
Nα = (Pf±Pкр±Gsin β )V η /1000. Здесь знак минус берется для уклона. Разность мощностей на подъеме и уклоне
ΔN=2V η Gsin β /1000
Мощность от сил тяжести и реакций почвы при обработке пласта вверх и вниз
Np= (Pf±P±Gsin β)V η β /1000. В этом случае также разность мощностей 2Np= 2Vη G sin β /1000. Такое совпадение разностей мощностей в тяговом и тормозном режимах характеризует уравнение
Nα -Np=(Pf+Pкр-P)V η /1000. Режим характеризуется так:
Pf+Pкр>P; Nα >Np - тяговый;
Pf+Pкр<P; Nα <Np - тормозной;
Pf+Pкр=0; Nα =Np - нейтральный. Отсутствие мощности в цепи привода колес в нейтральном режиме указывает на передачу всей мощности рабочим органам.
Закономерности изменения нагрузки двигателя и потока мощности к ходовой части не совпадают, так как изменения толкающей силой ведущего момента обуславливают регулирование мощности торможения (утилизации) пропорционально скорости и отрицательному моменту с передачей части выходного сигнала обратным знаком на вход управления утилизатора. В этом случае изменение передаточного числа трансмиссии увеличивает приспособляемость утилизатора к изменению нагрузки, расширяет его диапазон регулирования. Законы регулирования передаточного числа трансмиссии в тяговом и тормозном режимах совпадают, следовательно, работа датчика на уклоне и подъеме не требует вмешательства человека, пропорциональность передаточного числа отрицательному моменту обеспечивается с учетом настройки так же, как и в тяговом режиме. Это оценивает автоматическое торможение.
Ввиду того что привод рабочих органов жестко соединен с приводом колес, скорости относительного и поступательного движений рабочих органов синхронизируются. Регулирование скорости двигателем одинаково влияет на эти скорости рабочего органа. За пределами такого регулирования изменение передаточного числа трансмиссии расширяет пределы допустимого изменения параметров. Это облегчает использование датчика нагрузки и упреждающей информации при знакопеременных режимах для управления двигателем, утилизатором и трансмиссией, а также оценки эффективности работы агрегата.
В нейтральном режиме работы колес движущую силу агрегата создают рабочие органы. Ведущий момент рабочих органов возрастает по мере перехода колес из нейтрального режима в ведомый и тормозной и создает на приводе колес отрицательный (ведомый) момент
Мк=Мgiтр ηтp -Ртrк ηтp , где Mg - крутящий момент двигателя; iтр, ηтp - передаточное число и КПД трансмиссии; Рк, rк - касательная сила и радиус колеса.
При оценке потоков энергии необходимо учесть биокибернетические свойства взаимовлияния цепей управления, эффект малоэнергозатратности, преобразование цепей связи с внешней средой и уравновешивания сил в машине, без полевой доски. Узловая точка с частично заторможенным звеном дает информацию о проходящем через эту точку потоке энергии. Заторможенный поток энергии может управлять и утилизировать энергию путем возврата в точке отбора, закономерное изменение потока информации может влиять на параметры других потоков.
Колеса получают энергию от рабочих органов и двигателя, сравнивают силы и сопротивления и отсутствие разницы воспринимают как свободное качение.
Если, включив привод реактивных рабочих органов, нагрузить их, толкающая сила облегчает движение, снижает поток энергии от двигателя к колесам и увеличивает поток от колес к приводу рабочих органов. Наличие торможения, упругости, просвета около тыльной стороны рабочего органа для прерывания цепи рабочий орган - почва и уравновешивание реакций почвы и сил привода снижают затраты энергии на выполнение технологического процесса почвообработки.
В известной методике оценки технологического орудия - плуга коэффициент полезного действия учитывает мертвое сопротивление и притупление лемеха. Потери на трение полевой доски и отвала также следует считать и их отрицательное влияние на почву влияет на энергетическую, экономическую и экологическую оценку КПД агрегата
ηa=1-(fGa+Pтр+Pα +Pp+Pк')P=
= 1-(Nf+Nтр+Nα -Np+Nко)/Nвом, где Рк - сила сопротивления движению каретки по дорожке рамы; Pк' - сила тяги рабочего органа назад; Nтр.п. - мощность трения рабочих органов о почву; Nка - мощность движения каретки.
КПД плуга реактивного типа ηп=1-(fGa+Pтр+Pp)/P, где Ртр - сила трения рабочих органов о почву; Gп - сила тяжести плуга.
η =1-(fGп-Ртр)/Р - - КПД обычного плуга с учетом трения.
Сила сопротивления обычного плуга является сопротивлением движению агрегата, а реактивного плуга - сопротивлением приводу рабочих органов. Если толкающая сила обеспечивает самопередвижение плуга ηп=1-Ртр/Р; fGп=Рр. При Рр>fGа избыточная толкающая сила расходуется на самопередвижение агрегата
ηп=1-(Ртр+Рf+Pα )/Р.
При реализации способа оценки, принципов исследования системы машины - местность - человек, обучения и управления измеряют момент нагрузки, информацию об изменении значения нагрузки подают на вход управления корректора вертикальных нагрузок, силового регулятора рабочего орудия, трансмиссии, двигателя и утилизатора выводят на указатель, перемножают и используют для оценки энергозатрат элементами агрегата, измеряют поток мощности при наличии и отсутствии измеряемого параметра при изменении знака нагрузки и радиуса поворота, по результатам измерения вычисляют коэффициенты полезного и вредного действия агрегата, режим скорости определяют по курсу, соблюдают очередность управления трансмиссией, двигателем, корректором вертикальных нагрузок и рабочим орудием, взаимодействие движителя и почвы оценивают в диапазоне изменения скольжения от 0 до -1 и снижении угловой скорости колеса от нуля, при оптимизации траектории движения почвообрабатывающего орудия процессы повторяют, допускают качения движителя по дну борозды при выравнивании рамы и орудия, угол выравнивания ограничивают шириной захвата и высотой подъема по ширине шины от наклона и оценивают при измерении мощностей, затрачиваемых на самопередвижение и подвороты при формировании траектории, энергию толкающей силы орудия подают на вход привода рабочих органов и определяют реактивную мощность орудия и эффективность работы агрегата. Энергопотоки к колесам, гидросистемам, рабочим органам орудия, элементам обслуживания определяют, отключая их поочередно при прямолинейном и криволинейном движениях на равнине, подъеме и уклоне; процессы формирования курса, скорости двигателя, регулирования передаточного числа трансмиссии, догрузки ведущих колес, ширины и глубины почвообработки корректируют на основе оценки потоков мощности и коэффициентов полезного и вредного действия, изменения знака нагрузки и значения реактивной мощности.
В начале формируют программу регулирования курса, по ней определяют программу регулирования скорости, соблюдают очередность управления трансмиссией, двигателем, корректором вертикальных нагрузок, догружателем ведущих колес и рабочим орудием; информацию об изменении энергопотоков используют для снижения уплотнения почвы, качения колеса по дну борозды.
Датчик моментной нагрузки соединяют с механизмом навески с возможностью догрузки ведущих колес и силового регулирования сопротивления орудий пропорционально нагрузке. При чрезмерном увеличении нагрузки, когда возможности управления трансмиссией и двигателем исчерпаны, глубину почвообработки корректируют путем подачи масла в полость подъема, при снижении нагрузки масло выпускают и орудие опускают до восстановления глубины, при необходимости глубину поддерживают постоянной, используя сигнал муфты сцепления для подъема одного корпуса на подъме и опускания на уклоне. Способ оценки машины и условий реальной работы используют при формировании траектории, включая поворот, регулировании нагрузок и скоростей, опорных реакций, распределении энергии между бортами и другими потребителями, управлении торможением утилизатором, ограничении напряжений почвы и согласовании всех этих процессов, определении этих показателей и в качестве принципа их исследования. Все другие процессы протекают, определяют и оценивают известными способами и средствами.
При использовании предлагаемого способа оценки и принципа исследования эффективности машин, энергопотоков агрегата, энергоемкости технологий, кинематики, динамики и других показателей при реальной работе без сложной техники и высокой квалификации включением искомого параметра снижаются затраты средств и времени комплексного решения проблем развития системы человек-машина-почва, электронизации, диагностики эксплуатации и адаптации техники к местности и требованиям пользователя, коренного изменения уровня познания и применения малоэнергозатратных процессов.



Использование: средства оценки параметров сельхозмашины при создании сельскохозяйственной техники. Сущность изобретения: в процессе перемещения сельскохозяйственной машины регистрируют ее скорость, скорость ее колес, рассчитывают коэффициент проскальзывания, регистрируют нагрузку на машину со стороны сельхозорудия. После этого при различных режимах работы отключают по заданной зависимости энергопотоки от частей сельхозмашины и определяют при этом параметры машины, а в режиме утилизации энергии толкающей силы дополнительно регистрируют коэффициент проскальзывания колеса. 2 з.п. ф-лы, 25 ил.
| Способ управления агророботом | 1987 |
|
SU1556557A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
