Изобретение относится к машиностроению, сельскому хозяйству, гидромеханизации, транспорту, технике и технологиям обработки грунтов, дорожной и пожарной технике и может быть использовано в различных отраслях жизнеобеспечения и защиты человека, техники и природы, а также в качестве новой концепции развития техники, технологий и роботизации.
Известен способ управления машиной, включающий перемещение трактора и воздействие на него сил взаимодействия рабочих органов с землей (патент России №2086083 от 16.04.91, Бюл. №22 от 10.08.97 г.). Способ реализован устройством, которое содержит механизмы перемещения и подъема рабочих органов.
Уровень технологий и техники характеризуется тем, что технологические, динамические, управляющие, защитные функции осуществляются энергопотоками и средствами их реализации с большим ущербом: затратами металла, энергии на уничтожение ресурса, биоклиматического потенциала и природы.
Цель изобретения - устранение этих и других недостатков.
Способ реализуется устройством с шагающими рабочими органами. Рабочие органы перемещают вперед на шаг, останавливают, реактором удерживают от отхода назад при перемещении других рабочих органов и машины, сочетают силовые и технологические функции или упорами на окна совершают шагающее движение по стенам высотных домов.
Шагающие сменные, режимные рабочие органы при обработке земли преобразуют технологические, динамические и управляющие функции и режимы.
Сопротивление рабочего органа обратному ходу (реакцию) повышают упорами-реакторами-спинками-почвозацепами, чтобы толкающая сила соответствовала требуемой, самоповоротом преобразуют шагающий рабочий орган в реактор-якорь. Перемещают рабочие органы вдоль для повышения скорости при малом захвате, поперек для повышения ширины захвата или сочетая их повышают ширину захвата и движущую силу.
Поворотом ног изменением знака сопротивления/перестановкой упоров или ограничителей реверсируют шагающее движение. Шагающие рабочие органы перемещают поочередно или вместе в зависимости от условий работы.
При дифференциальном приводе рабочих органов очередность шагания и скорость перемещения рабочих органов определяют их сопротивлениями, при трогании с места рабочие органы малого сопротивления располагают впереди рабочих органов с большим сопротивлением движению и соблюдают очередность работы в сопротивляемой среде или при встрече с камнем или с другими препятствиями сопротивления и силы преобразуют в подъем или обход, в каждом случае снижают опасность.
Машина содержит сменные шагающие рабочие органы для обработки земли и других материалов без выглубления и/или упоры (реакторы, якоря) для шагающего движения. Сменные шагающие движители выполнены в виде рабочих органов плуга, или рыхлителя, или лущильника, или культиватора, или бульдозера, или грейдера, или корчевателя, или кустореза, с упорами /реакторами, снимками) для получения движущей силы для выполнения различных работ и движения.
Машина содержит упор (якорь, реактор) и привод для перемещения с возможностью продольного и поперечного шагания по полю и стенам высотного здания.
Машина содержит упоры на окна для шагания по стенам, пожаротушения, ремонта, а также веревочную лестницу для спасения людей. Дифференциальный привод соединен с рабочими органами разного числа (сопротивления) с возможностью саморегулирования очередности действия рабочих органов.
Привод рабочих органов (редуктор механического отбора мощности) соединен с насосом гидравлического отбора мощности с возможностью подъема, регулирования нагрузки двигателя, хода, ширины захвата, глубины, догрузки, защиты от перегрузки при выполнении различных работ (преобразования технологических динамических и управляющих функций).
Привод рабочих органов содержит источник колебания в виде шарнира кардана и/или подшипника с большим шагом установки шариков, или эксцентричного катка.
Отвал имеет крылья и регулятор формы крыла.
Полевая доска плуга шагающего хода установлена на оси поворота и изменения режима упора в сторону упора назад. Машина содержит держатель сменных наконечников для выполнения технологических и динамических функций для рыхления, различных вспашек, дискований, лущений, боронований, культиваций, мелиоративных, гидротехнических, дорожных, строительных, посевных, уборочных работ. Машина содержит следопрокладчик и видеокамеру наблюдения за следом при вождении широкозахватной машины или контроле за дистанционной работой.
Машина содержит рабочие органы содействия и противодействия движению и выполнению различных технологических процессов и динамических функций. Рабочие органы имеют вертикальные оси преобразования направления действия реактивной силы в шагающем и тормозном режимах работы. Оборотные отвалы или крылья для работы в тормозном режиме с возможностью изменения направления оборота пласта. Отвал, крылья и полевые доски установлены поворотно с возможностью работы в различных режимах, включая режимы упоров, реакторов, спинок в шагающем ходе и в тормозном режиме.
Шагающие и тормозные рабочие органы-плуги общего и специального назначения для легких, тяжелых и каменистых почв, оборотные, дисковые, кустарниково-болотные, ярусные, садовые, плантажные подрезают, крошат, рыхлят, оборачивают пласт, уничтожают сорняки, создают силу для доведения почвы до аэровлагоспелости (совмещениям операций) без множества различных борон, культиваторов, катков, лущильников, фрез, противоэрозионных и комбинированных орудий для предпосевной обработки, посева, борьбы с сорняками, уборки камней, клубней, саженцев, мелиорации, сооружения дорог, дамб, рудников, каналов, водохранилищ, очистки от лавин, транспортировки грузов и гидромеханизации.
Однократное выполнение одной операции сочетают с повторением другой, вспашку, рыхление, прочесывание почвы, перемещение земли или иного материала сочетают адаптивно.
Технологические процессы совмещают или регулируют без изменения тяговой силы колес и/или без колес. С повышением твердости земли колебания рабочего органа усиливают, с повышением влажности в теплое время и температуры зимой снижают колебания.
Колебания трактора или машины преобразуют в колебания рабочих органов, ущерб колебаний и вибраций, подпрыгивания, подергивания, пошатывания, голопирования, покачивания и рыскания в любом сочетании преобразуют в пользу человеку, технике и почве. Колебания получают от кардана, одного его шарнира, и/или дорожки, и/или катка эксцентриком, стойкой и шипами. При работе и испытаниях сигнал об изменении тяговой силы получают от привода рабочих органов и используют для регулирования функций машины, массы и рабочих органов саморегулирования сил, оценки динамической, технологической, эргономической и ландшафтной эффективности и безопасности функций. Продольную силу регулируют пропорционально сопротивлению поперечного хода и адаптивным саморегулированием устраняют ущерб технике, почве и экономике.
Эффективность работы земли, воды, солнца, времени биопродуцирования, техники, человека и использования биоклиматического потенциала повышают снижением затрат металла, энергии и труда и преобразуют ущерб от затрат в пользу, расход энергии на буксование колес, износ и разрушение структуры почвы преобразуют в саморегулирование технологической силы, оборота пласта, достатка /недостатка сил движения/.
Изменяя функции рабочих органов, преобразуют ущерб ходовой системы в пользу, изменяют технологические, динамические, эргономические функции рабочих органов, очувствление компонентов сочетают с адаптивным саморегулированием и/или малоэнергозатратностью управления.
Изменяя скорость движения машины, регулируют функции рабочих органов, оборот пласта и/или обратимость знаков сил, и/или кратность повторения работ. Колебания рабочих органов изменяют в зависимости от твердости почвы и холодоспелости, технологические и динамические функции рабочих органов изменяют в зависимости от направления перемещения или положения /поворота в двух плоскостях/. Изменяя силовые и технологические функции машины или рабочих органов, повышают безопасность.
Снижая скорость движения машины, повышают оборот пласта, толкающую силу рабочих органов или, повышая скорость движения, снижают оборот пласта и регулируют запашку биомассы и защиту почвы от эрозии. Изменяя положение дисков, лап, плугов ограничителями настройки, изменяют функции /операции/.
Перемещая рабочие органы в одну сторону, пашут или рыхлят, при обратном ходе перемещают землю или иной материал.
Лопату реверсивного хода перемещают в рабочем режиме в одну сторону, в обе стороны - в зависимости от настройки ограничителя. Технологические и динамические функции рабочих органов изменяют ограничителями хода или поворота, заданное положение рабочего органа фиксируют фиксаторами. Совмещая силовые, технологические и управляющие функции рабочих органов или энергопотоков машины повышают безопасность.
На фиг.1 изображена схема привода сменных рабочих органов, на фиг.2 - схема двухрычажной ноги, на фиг.3 - схема ноги, вид сбоку, на фиг.4 - схема цепного привода, на фиг.5 - схема привода, вид сбоку, на фиг.6 - схемы изменения функций - настройки рабочих органов, на фиг.7 - схема шагания и реверсивного хода, на фиг.8 - схема шагания, на фиг.9 - схема взаимовлияния скорости и ширины захвата, на фиг.10 - схема шагания по окнам дома, на фиг.11 - схема культивации шагающими лапами в двух направлениях, на фиг.12 - схема вибропривода и возможных колебаний, на фиг.13 - схема шагающих рабочих органов, на фиг.14 - схема направляющих колес и дисков, на фиг.15 - схема ориентирования тракторного и одноосного агрегатов на склоне, на фиг.16 - схема видеокоррекции траектории широкозахватного агрегата, на фиг.17 - схема стоек и сменных наконечников, на фиг.18 - схема регулирования функций и режимов, на фиг.19 - схемы шагающих рабочих органов и секций, в различных режимах поперечного хода, на фиг.20 - схема выбора режимов, на фиг.21 - изменение режимов лопаты, на фиг.22 - схема установки и действия упоров (реакторов, якорей), на фиг.23 - схема рабочих органов для рыхления, плантажа, кустореза, бульдозера и др. мелиоративных рабочих органов, на фиг.24 - схема направляющих шагающих рабочих органов, почворулей и борта машины, на фиг.25 - схема настройки режимов движения, на фиг.26 - схемы настройки режимов технологических и динамических функций и режимов, на фиг.27 - схемы траекторий хода рабочих органов поперечного хода при шагании, на фиг.28 - алгоритм совмещения шагания и реверсивного хода рабочих органов, на фиг.29 - алгоритм совмещения путей развития, на фиг.30 - схема-алгоритм коррекции конструкции, применения, на фиг.31 - алгоритм изменения энергопотоков, на фиг.32 - алгоритм реализации свойств очувствления и саморегулирования, на фиг.33 - баланс затрат и ущербов, на фиг.34 - алгоритм регулирования функций и режимов, на фиг.35 - алгоритм развития гибкости функций и режимов, на фиг.36 - алгоритм развития гибкости функций и управления на фиг.37 - алгоритм сочетания новых явлений и законов, на фиг.38 - алгоритм сравнения трактора и агромашины с ведущими рабочими органами,
на фиг.39 - алгоритм оценки и коррекции управления,
на фиг.40 - оценка опасности путей решения проблем,
на фиг.41 - схема оценки опасности технологий,
на фиг.42 - влияние преобразования функций на полезность,
на фиг.43 - алгоритм сочетания целей управления,
на фиг.44 - оценка полезности по критериям конкурентоспособности и препективности управления,
на фиг.45 - алгоритм развития функций автомобиля,
на фиг.46 - алгоритм оценки саморегулируемости изменений,
на фиг.47 - схема оценки эффективности изменений функций приборов электро и гидрооборудования и двигателя,
на фиг.48 - оценка известных путей повышения производительности,
на фиг.49 - алгоритм интеграции управления в науке, производстве и обществе,
на фиг.50 - оценка управления переходом от жесткости к гибкости и функций,
на фиг.51 - выбор режимов шагания.
Способ реализуется устройством (машиной), содержащей рычаги 1 (фиг.1 с тягами 2, приводом 3 и/или гидроприводом 4 для перемещения сменных рабочих органов 5 для выполнения различных работ (плуги, зубья, диски, лапы, лопата при движении вдоль и поперек).
Вариант привода для широкого шага (фиг.2, 3) имеет рычаги 6, 7 поворота в параллельных плоскостях (фиг.3) для перемещения рабочих органов относительно диска 8. Шагающие плуги, лущильники, лапы, зубья, рыхлители, окучники, бульдозеры, колеса, ножи, пила с лезвиями с двух сторон для срезания кустов и корней, корчеватели деревьев, корней, камней, мин; очистители дорог и полей, тягачи для различных рабочих органов и их секций в любой среде /земле, воде, на льду и снегу/ или их крылья имеют упоры, адаптивно, поворачивающие под действием сопротивления между ограничителями в виде упоров, штифтов и т.д.
Гидропривод между насосом и распределителем соединен с гидроцилиндром вертикального подъема машины. Это очувствляет привод, - может преобразовать сопротивление рабочих органов, рычагов 1 пропорционально сопротивлению - саморегулировать нагрузку, получать эффект адаптивного шагания, саморегулирования сопротивления, защиты рабочих органов и, самое главное, корчевать камни и перемещать их с возможностью превращения рычагов в роботоруки. Два рычага 1 поочередного шагания могут дать непрерывное движение вдоль оси машины. Их упоры при шагании могут создать большое сопротивление отходу рычагов (ног) назад, при перестановке ограничителей могут изменить направление движения (вперед-назад). Изменением скорости задают режимы утилизации энергии, оборота пласта, запашки биомассы, - образования минитрасс, изменения глубины каналов, прудов границей чеков, высоты дамб, дорог сверхпроходимости, шагания, тяги, корчевки, изменения аэроспелости.
Привод рабочих органов имеет известный планетарный редуктор вала отбора мощности и реечную передачу или цепь. Редуктор и насос соединены с возможностью механического /привода/ и гидравлического отбора мощности /управления/, подъема регулирования хода /шириной захвата/, положения, функций, рабочих органов, глубины почвообработки догрузки и разгрузки колес и осей энергомодуля, защиты от перегрузки и поломки, поперечного движения и изменения режимов работы при замещении функций более 200 машин в различных отраслях. Планетарный редуктор и гидронасос - соединение механической и гидравлической передач / привода и управления рабочих органов с возможностью получения и применения информации об изменении энергопотока для управления, эксплуатации, диагностики безопасной работы, упрощения настройки, повышения эффективности и облегчения познания производства и применения.
Применение проката для минимизации оригинальных деталей.
Новые свойства связей устраняют потребность в изучении, проектировании, производстве, испытании и использовании систем машин, их показателей, характеристик, кинематики, расчетов по обслуживанию, производительности, планированию работ, состава машин, учету, оценке качества процессов при их совмещении с учетом биосроков, условий защиты человека, техники, растений, почвы, т.е. замещает функции эксплуатации, диагностики, безопасности жизнедеятельности в сфере безопасного жизнеобеспечения.
Механические руки и ноги из рычагов 1, тяг 2 соединены с валом отбора мощности 3 (ВОМ) и гидроприводом 4 (ГОМ) с возможностью возвратно-поступательного движения в различных плоскостях (вертикальной, наклонной), копирования поля, перемещения рабочих органов 5 (указаны вокруг привода), подъема, силового регулирования, привода осей прицепов, механизмов поворота, защиты рук, дистанционного действия, погрузки, аварийной работы, движения по стенам, крутым склонам, ледникам и т.д. и изменения числа осей и рабочих органов, рук и ног в зависимости от мощности двигателя и желаемой производительности.
При дифференциальном приводе рабочих органов положения секции и рабочего органа определяются их числом, глубиной, сопротивлением. При этом то, что легко, занимает положение впереди. Положения изменяются и определяются ограничителями поворота. Упор, якорь, спина, реактор работает в качестве полупроводника механического движения, т.е. после перемещения на шаг в нужном направлении, остановки и в начале обратного хода упирается в твердую почву или грунт, или на стене дома (окна) создают сопротивление, превосходящее требуемую движущую или подъемную силу, после чего перемещается энергоустановка и другие рабочие органы на шаг, и процесс шагания повторяется силой привода поочередно или совместно. Известные колеса-опоры и транспортного хода могут быть ведущими и катками - рабочими органами, или регуляторами глубины хода рабочего органа.
Вариант исполнения агрегата с цепной передачей (фиг.4, 5) из одинаковых звездочек штангами 10 в параллельных плоскостях I, II, III может перемещать рабочие органы 11 для лущения (фиг.6), вспашки и выполнения других работ. Перемещение соответствующих рабочих органов в обе стороны и поворот между ограничителями в шарнире 12, 13 под действием сопротивления почвы возможен в варианте привода от одной ветви цепи или цевочного механизма перемещения рейки и рабочих органов. Рейка цевочного зацепления может иметь шарниры для регулирования хода /длины/. Рабочие органы устанавливаются на каждом конце рейки, и ширина захвата удваивается. К рейке можно присоединить, как и к другим приводам, дополнительные секции рабочих органов. Рука любой конструкции в зависимости от прочности может перемещать различное число секций рабочих органов, и изменением угла поворота рычагов можно регулировать ход и ширину захвата.
Секции 14 (фиг.6-10) соединены с приводом с возможностью изменения ширины междурядия С и сплошной культивации в зависимости от угла установки. Рабочие органы для рыхления 15 (фиг.6), плоскорезной обработки 16 (фиг.12-13), боронования 17, лущения и посева могут изменять функции в зависимости от углового положения. Корпус 18 (фиг.6, 22) с самоповоротным между ограничителями отвалом 19 или секции рабочих органов могут изменить ширину пласта в зависимости от угла α установки и регулировать глубину колесами 20. Секция 21 (фиг.6) корпусов с отвалами для правого 22 и левого 23 оборота почвы в зависимости от угла установки может нарезать борозды на различном расстоянии и пахать при реверсивном их перемещении в обе стороны с возможностью поворота между ограничителями 24 под действием сопротивления почвы.
Преобразование функций культиватора от широкорядного до сплошного, дисковой батареи от бороны до лущильника и бороздореза, плуга от гребнователя до бороздореза осуществляют без смены рабочих органов.
Шагающие рабочие органы (фиг.7-14) для выполнения различных работ: плуги 18, 23, лапы 14, 24 с виброприводом 25, лапы 26 с упорами (упор, якорь) 27, зуб 28, почворулевые диски 29, канал 30 видеослежения за базовой линией вождения 31, как рабочие органы или наконечники зубьев (фиг.17), рыхлители с упорами 32, плантажные плуги 33, кусторез, канавокопатель 34, бульдозер, грейдер, планировщик 35 с упором 32, направляющие рабочие органы с почворулем (фиг.29) и рулевой частью, носком 36 или диском 37 (фиг.24), предохранителем 38 для подъема при встрече с камнем, быстросменные наконечники 39, 40, 41 соответственно для окучивания и дисковой культивации в режиме вибрации от вибратора 42 и руля 29 или лемеха в режимах тормоза Т (фиг.25), ведущего В инструмента, якоря Я для удержания от отхода назад, или рабочих органов с упорами 43 при выполнении различных работ. Рабочие органы продольного и поперечного ходов с упорами и якорями могут сочетать технологические и динамические функции и управлять работой и шаганием поочередно или вместе, по любой траектории вдоль и поперек.
Способы управления, выполнения технологических процессов, получения движущей силы, защиты, выбора режимов управления и реализации явлений и законов саморегулирования, совмещения функций, очувствления, малоэнергозатратности, совместимости и преобразуемости, безопасности и эффективности имеют закономерный характер и подробно рассмотрены в алгоритмах (фиг.28-50). Рабочие органы вокруг привода на фиг.1 и на фиг.2-26 устроены аналогично известным и снабжены упорами-якорями для шагающего хода или выполнены для реверсивной работы без упоров. Носки и диски направляющих рабочих органов управляют поворотом.
Установка сменных рабочих органов для резания материалов (камня, бетона, дерева), перемещения материалов, их погрузки и выгрузки; возможность отбора мощности от гидролинии для привода бура, фрез, а также от руки и колес самоустанавливающего типа для привода ножа при сенокошении расширяет функциональные возможности.
Система реверсивных рабочих органов и их секций выполняет различные работы, соответствующие их типу и положению при возвратно-поступательном перемещении по одному или в различном сочетании. Положение определяется ограничителями поворота. Ширина захвата агрегата определяется ходом рабочих органов и числом секций. Скорость перемещения рабочих органов определяется по качеству работы. Подача вперед и скорость движения агрегата влияет на повторность выполнения работ.
Ось поворота рабочих органов, их отвалов и секций смещена от центра сопротивления. Это гарантирует поворот между ограничителями под действием сопротивления почвы для работы при движении в обе стороны без дополнительных рабочих органов, совмещением функций лево и право оборачивающих корпусов, преобразователей сопротивления в движущую силу и минимизаторов нагрузки колес.
Система реверсивных рабочих органов включает: компоненты рабочих органов в виде поворотного между ограничителями под действием сопротивления почвы отвала для оборота почвы вправо и влево или поочередно, рабочие органы, оси поворота которых смещены относительно центра сопротивления, секции рабочих органов реверсивного типа, оси поворота которых смещены от центра сопротивления с возможностью поворота между ограничителями под действием сопротивления почвы. Изменением угла установки рабочих органов ограничителями, например, в виде болтов корректируются функции. Соответственно изменяется скорость движения агрегата. Шаг установки рабочих органов на секции допускает их поворот. Угол α установки секций и рабочих органов влияет на работу и корректирует ее.
Устройство для реализации нового способа работает следующим образом. Рабочие органы или их секции перемещаются механическим или гидравлическим приводом относительно трактора или иного энергосредства, в конце хода поворачиваются между ограничителями под действием сопротивления почвы, подаются вперед и перемещаются в обратном направлении и повторяют эти движения при вспашке, лущении, культивации, плоскорезной обработке, планировке, прочесывании и перемещении почвы, уборке различных культур, проведении культурно-технических и дорожно-строительных работ, адаптивно снижая нагрузку колес, без их буксования с любой заданной повторностью выполнения работ без увеличения числа рабочих органов и проходов по полю.
Подача рабочих органов вперед осуществляется по одному из следующих способов: непрерывно при низкой скорости движения агрегата, дискретно силой или по сигналу упора прерыванием движения трансмиссией без ходоуменьшителя или подталкиванием упором. Непрерывная подача вперед и повторение процессов лущения, боронования, каткования, перемещения почвогрунта и других операций достигается при непрерывном движении с малой скоростью и ритмическим движением. Функции рабочих органов, их секций в различном сочетании или автономно изменяют выбором углового положения или повторяют с учетом исходного состояния и желаемого результата. Совмещение операций снижает потребность в их повторении. Сопротивления рабочих органов уравновешиваются путем взаимно-противоположного их перемещения. Это снижает нагрузку колес до нуля и допускает регулирование повторности работ и повышение чувствительности к изменению курса.
Большая ширина захвата технологического модуля исключает опрокидывание энергосредства, минимальная сила тяги исключает буксование и сползания при работе на склонах. Работу изменяют и нагрузку регулируют ограничителями, повторение работ - подачей. При культивации междурядий работу выполняют в двух направлениях /фиг.11/.
Производительность и скорость движения агрегата пропорциональны ширине захвата рабочего органа или секции и снижаются кратно повторению функций. Сопротивление рабочих органов можно регулировать, изменяя ширину их захвата. Это компенсирует изменение глубины. Ширина захвата агрегата определяется ходом рабочих органов и числом их секций, а точнее - их произведением и не зависит от тяговой силы колес или тягового класса трактора. Это допускает увеличение скорости движения агрегата прямо пропорционально ширине захвата рабочих органов или их секций. Малая тяговая сила колес допускает их разгрузку от сил тяжести, передачу силы тяжести трактора каткам, дискам и исключение всякой необходимости в перевозке балласта или повторении проходов для крошеная комков почвы.
Возможность повторения функций рабочих органов за один проход исключает необходимость в установке дополнительных рядов /следов/ дисков, катков, борон. Избыток движущей силы рабочих органов допускает установку рабочих органов продольного хода вместе с трактором для торможения агрегата и оставления базовой линии при автовождении по следу. Продольное и поперечное перемещение-обработка в двух направлениях облегчает работу в садах, под кронами деревьев и на большем удалении от трактора, поддерживая технологическим модулем энергосредство.
Поворот рабочих органов, отвалов или других компонентов и секций между ограничителями под действием сопротивления почвы делает их влекомыми, самоустанавливающимися между упорами. Это достигается смещением шарнира поворота от центра сопротивления. Это обеспечивает преобразование рабочих органов правого хода в реверсивные. Ролики в качестве отвалов снижают сопротивление и располагаются с возможностью поворота или вращения под действием сопротивления почвы при вспашке реверсивным перемещением. Все рабочие органы работают при реверсивном ходе с учетом настройки.
Основой нового способа выполнения работ является изменение функций и преобразование однократного выполнения рабочих процессов в двух- и многократное выполнение работ без дополнительных проходов (за один проход агрегата) и дополнительных рабочих органов. Повторную работу корректируют, кратность повторения изменяют за один проход агрегата каждым рабочим органом. За один проход агрегата почву обрабатывают в двух направлениях: вдоль и поперек оси агрегата и функции компонентов машины совмещают, сочетают и корректируют адаптивно. Работу повторяют без дополнительных проходов агрегата по полю и без увеличения числа следов и количества рабочих органов. Правило повторения работ таково: каждый рабочий орган повторяет свою работу до достижения целевого состояния почвы, грунта и других материалов за один проход трактора в наилучшее время. Повторение работы не имеет предела, при снижении скорости движения агрегата до нуля достигает бесконечности, переходит в режим стационарной работы, например, при распиловке леса, скирд, камней, дорожного покрытия, погрузке и разгрузке материалов. Другой крайностью является снижение коэффициента повторности до нуля. Коэффициент повторения работы от нуля до единицы /до однократной работы/ соответствует перемещению рабочего органа по криволинейной траектории с шагом, соответствующим соотношению скоростей движения рабочих органов и агрегата с обязательным огрехом, что полезно при кротовании, осушении, орошении, широкорядном распределении материалов, глубоком рыхлении для последующего перемещения почвогрунта или иного материала, сборе бревен в реке, очистке каналов. Повторение работ снижает число проходов агрегата по полю и число рабочих органов. С увеличением числа рабочих органов и совмещений операций потребность в повторении работ снижается, но и производительность при повторении снижается. Снижение числа рабочих органов, проходов и повторений является оптимальным способом достижения цели работы.
Кратность повторения работ зависит от ширины Шр, длины хода l рабочего органа и скоростей его перемещения Vp поперек оси и движения агрегата V:
Kп=Шp·Vp/lV; V=ШpVp/Kпl.
Здесь соотношение скоростей выполнения работы и движения агрегата легко регулируется. Практически повторение работ регулируется выбором ширины захвата рабочего органа и изменением подачи вперед с учетом вариаций условий местности, возделываемой культуры и вида работ. При таком повторении работ исключается необходимость в установке второго ряда дисков, катков, борон или в повторении проходов агрегата в том или ином направлениях. Повторение работ перемещением лопаты бульдозера снижает количество рабочего и холостого движения трактора многократно и в различных отраслях. Повторение совмещенных операций несколькими рабочими органами отличается тем, что нагрузка колес при новом способе близка к нулю и ширина захвата агрегата увеличивается многократно.
Посев и междурядная обработка пропашных культур и садов реверсивными рабочими органами в двух направлениях снижает число проходов, повышает уравновешенность сопротивлений, повышает ширину захвата. Такой процесс междурядной обработки требует снижения скорости и повышения точности ритмической подачи вперед. Квадратное расположение растений допускает перемещение кратно ширине междурядия (фиг.22).
Повторение работ и коррекция функций рабочих органов снижает скорость движения, массу, силу тяги и потери энергии широкорядного агрегата, устраняет недостатки известной системы машин, облегчает переход от системы машин к системе рабочих органов к одной машине. Возможность регулирования качества почвообработки и регулирования желаемого состояния почвы с учетом исходного состояния способствует развитию технологий роботизации процессов в различных отраслях: дорожном строительстве, обработке почвы и грунтов в режиме робота.
Потребность в повторении работы - функций рабочих органов не имеет предела. При снижении скорости движения агрегата до нуля режим работы приближается к стационарному и коэффициент повторения возрастает бесконечно. Практически многократное повторение рыхления и перемещения грунтов при строительстве дорог, дамб, траншей, гидротехнических сооружений, рекультивации полей, защите среды, заполнении траншей, обработке опасных полей, недоступных трактору мест, склонов, придомовых и придорожных участков повышает эффективность и уровень механизации и роботизации процессов.
Бесконечное повторение работ требуется при резании и перемещении материалов на стационаре, где работа прерывается и не требует автономного энергосредства.
Снижение коэффициента повторения работ от единицы /однократной работы без огрехов/ до одной десятой или сотой доли соответственно в десять и сто раз повышает просвет между следами рабочих органов при осушении, поливе, кротовании, нарезке борозд, широкорядном распределении материалов, глубоком рыхлении полей после корчевки леса и кустарников, подготовке почвы к первой обработке и т.д.
Площадь обработки - производительность агрегата повышается снижением повторений воздействий рабочих органов.
Установка нескольких типов рабочих органов /совмещение операций/ снижает потребность в повторении работ при большой ширине и малой нагрузке колес путем уравновешивания сопротивлений их противоположного перемещения. Поэтому оптимальным способом выполнения работ будет тот, который снижает: число рабочих органов и проходов, количество движения, расход энергии и времени.
Повышение коэффициента повторения работ при большой ширине решает много проблем механизации и роботизации земледелия и других отраслей.
Реверсивные рабочие органы и их секции при перемещении в противофазе снижают сопротивление движению трактора или иного энергосредства вперед. При выполнении энергоемких процессов почвообработки рабочие органы преобразуют часть сопротивления в движущую силу и подталкивают трактор. Пропорциональность такой движущей силы сопротивлению рабочих органов обеспечивает адаптивное снижение нагрузки колес до нуля и возможность совмещения операций применением ведущих и ведомых рабочих органов. Уравновешивать силы и сопротивления рабочих органов можно с учетом курса при низкой скорости движения агрегата и оптимальной скорости выполнения технологических процессов. Если избыточная движущая сила возникает, колеса переходят в режим свободного качения или торможения, что легко устраняется регулированием угла поворота рабочих органов ограничителями, то адаптивное регулирование сил, тягового класса трактора без увеличения сцепного веса и нагрузки ходовой части существенно снижает количество движения машин без ограничения их производительности и мощности путем увеличения поперечного хода рабочих органов /ширины захвата агрегата/ и ослабляет зависимость ходовой части от крутизны склона, влажности почвы и погоды. Снижение нагрузки колес допускает расширение их функций: получение упреждающей информации об изменении внешних условий для оценки и управления агрегатом, упрощение решений проблем: обработки почвы рано весной, соблюдения агросроков, снижения уплотнения почвы, защиты от снижения плодородия, регулирования скорости; защиты человека, техники и среды; повторения обработок почвы за один проход агрегата; запашки незерновой части, развития системы машин и типажа тракторов, роботизации технологий, универсализации, формирования ряда унифицированных модулей различной производительности, облегчения работы и т.д.
Регулирование скорости движения такого агрегата состоит из разгона, остановки и поворота при минимальной нагрузке колес, ритмическом или непрерывном движении, малом участии человека и отборе почти всей мощности для привода /реверсивного хода/ рабочих органов. Реверсивное перемещение рабочих органов включает замедление в почве, подачу вперед, поворот для выполнения работы при обратном ходе, разгон с возможностью использования кинетической энергии для выполнения полезной работы и согласования нагрузок. Плавное снижение скорости поперечного хода, перемещение вперед и снижение подачи с повышением скорости, т.е. взаимно противоположное изменение скоростей и сил в двух плоскостях стабилизирует нагрузку и автоматически регулирует скорости выполнения работ и движения агрегата одной многоцелевой муфтой-насосом - средством силового регулирования, защиты, подъема орудия, догрузки ведущих колес, автоторможения, автоматического регулирования скорости движения по нагрузке при выполнении транспортных работ, стабилизации курса с возможностью снижения холостого хода и поворота радиусом, равным нулю.
Для снижения массы, регулирования ширины захвата и облегчения автовождения копированием следа предыдущего прохода или борозды выгодно использовать однорукий /длиннорукий/ широкозахватный агрегат. Руки одинаковой длины соединяются последовательно для получения длиннорукого агрегата. Это исключает потребность в рычагах-носителях рук, но требует установки диска и уравновешивания руки установкой рабочих органов, создающих силу и сопротивление.
Снижение металлоемкости широкозахватного агрегата, числа типов машин, влияния направления движения, числа и радиуса поворотов, зависимости траектории движения от горизонтали склона или направления вспашки и другие качества соответствуют интересам всех регионов
Реверсивные рабочие органы подаются вперед практически независимо от тягово-сцепных свойств преобразованием сопротивления в силу и с учетом совмещения и повторения функций рабочих органов.
Скорость движения агрегата и подача рабочих органов вперед в зависимости от мощности, производительности, повторности, условий местности, крутизны склона и других факторов определяется по одному из следующих: способов: 1/ непрерывно при низкой скорости включением ходоуменьшителя, 2/ дискретно силой или по сигналу конечного упора при замедленном движении трактора или энергосредства, 3/ дискретно прерыванием потока мощности трансмиссией любого трактора или иного источника энергии, 4/ дискретно подталкиванием агрегата, например, лопатой, диском, упором, колесом, гибкой тягой без ходоуменьшителя, трансмиссии и телескопического кардана.
Рабочие органы подаются вперед в зависимости от настройки в конце хода, в конце и в начале, в начале обратного хода с возможностью перекрытия проходов или соблюдения условий и защитной зоны.
Прицеп с люфтом допускает регулирование подачи, требует гибкой связи с гидросистемой или упором.
Уравновешивание толкающей силы при вспашке без полевых досок и других рабочих органов торможением трактора для удержания его до начала подачи снижает тяговое сопротивления рабочих органов за счет исключения трения полевых досок о почву. В этом случае по сигналу или силой конечного упора трактор растормаживается /сжимает пружину торможения/, агрегат подается вперед на ширину захвата рабочих органов с учетом необходимой повторности выполнения работ.
Недостаток толкающей силы некоторых рабочих органов требует малой силы тяги или установки упора-толкателя. На имеющихся энергосредствах выгодно для подачи использовать объемную муфту или регулятор скорости. При работе без трактора, автомобиля-самохода подача силой или по сигналу упора рабочих органов упрощает работу. Такой вариант делает технологическую машину самоходной. Совмещение функций компонентов техники повышает функциональные возможности. Многоцелевая муфта может управлять рабочими органами по сигналу конечного упора, подавать вперед и регулировать подачу. Давление можно использовать для разгрузки или догрузки рабочих органов и колес. При междурядной обработке повторение работ вдоль и поперек отличается от повторения работ. На других операциях подача и повторение регулируются так, чтобы толкающая сила лемешных и дисковых рабочих органов, составляющая 30-50% сопротивления, была использована для разгрузки колес или для тяги других рабочих органов. Избыток движущей силы выгодно исключить совмещением операций или установкой рабочих органов, создающих сопротивление подаче вперед.
При работе с ходоуменьшителем избыточная движущая сила подается на вход привода рабочих органов. В этом случае работа частично зависит от тягово-сцепных возможностей колес и избыточная сила не может превышать тяговую силу колес по сцеплению с почвой. В противном случае возможно скольжение колес /отрицательное буксование/.
Изгиб и кручение секции плуга исключается шпренгелями и колесом-регулятором глубины вспашки.
Увеличением числа секций и ширины захвата можно повысить производительность. Возможно и увеличение числа рабочих органов секции и скорости движения. В каждом случае создается условие для создания унифицированного ряда модулей различной мощности и производительности. Система сменных рабочих органов преобразует эти подули в многофункциональные машины для выполнения различных работ в земледелии и других отраслях.
Влекомость /самоперестановка/ рабочих органов под действием сопротивления и самоперестановка влекомого /самоустанавливаюцегося/ колеса-регулятора глубины вперед исключает скручивание секции рабочих органов плуга. Совмещение и сочетание функций и операций уравновешивает агрегат и повышает эффективность работы.
Независимость мощности и производительности от тягово-сцепных возможностей и буксования колес открывает новые пути многократного улучшения технических, агротехнических, экологических, эргономических и экономических показателей механизации и роботизации земледелия всех /и горной/ зон. Скорость движения агрегата регулируется независимо от нагрузки ходовой части, следовательно, минимизируется количество движения и опасность работы. Снижение буксования совместимо с выглублением рабочих органов и защитой их от перегрузки и поломки, стабилизацией нагрузки двигателя без изменения передаточного числа и технологической скорости, регулированием ширины захвата и глубины хода рабочего органа.
Реализация нового пути развития техники перемещением реверсивных рабочих органов относительно энергосредства открывает новые пути: снижения массы, тяговой силы, скорости движения агрегата, числа проходов, уплотнения почвы; потерь энергии, ресурса, времени рано весной, влаги, урожая, числа типов машин и тракторов, снятия ограничений мощности, производительности, уровня механизации и роботизации и зависимости от погоды.
Преобразование сопротивлений рабочих органов в машинную силу, их уравновешивание независимо от тягово-сцепных качеств, массы, числа осей и колес, свойств почвы и буксования и другие возможности и качества снижают нагрузку колес, влияние рулевой, шинной, креновой и скользящей поворотливости; наклона шкворней, развала и схождения колес, регулирования опорных реакций, разности скоростей и сил движения и торможения колес, блокирования дифференциала и подвесок, регулирования скорости обратно пропорционально нагрузке и энергопотоков с учетом реакций почвы и курса. Это способствует материало-, энерго- и ресурсосбережению, расширению функций колес, снижению их типоразмеров /унификации/, созданию унифицированного ряда машин различной производительности для всех зон.
Новый способ выполнения работ является общим решением многих проблем и реализуется преобразованием внешней силы в машинную - перемещением рабочих органов относительно трактора со скоростью, допускающей обработку и доработку почвы до необходимого состояния за один проход агрегата.
Сочетание и регулирование функций элементов машин и взаимодействующих рабочих органов, снижающих нагрузку ходовой части, является общим решением проблем механизации и роботизации земледелия, альтернативой узкофункциональных машин и их элементов, способом обработки почвы до прохождения спелости, снижения чрезмерной зависимости работы от погоды, соблюдения агротехнических сроков, снижения уплотнения почвы, повышения природосообразности и полезности воздействий рабочих органов, коррекции технологий и функций машин, снижения сопротивления почвы, ровной вспашки оборотом пласта назад, преобразования вибраций в полезную работу, развития системы машин, повторения обработки без дополнительного прохода, ускорения уборки путем высокого среза и легкой запашки биомассы, самоочистки рабочих органов, применения очень легкой техники, повышения тяговых качеств, проходимости, снижения массы, унификации ходовых систем, подвесок, механизмов поворота, планирования работ независимо от проходимости и тягового класса трактора, сезона года, повышения ширины захвата и производительности, снижение числа осей и колес, размеров колес. Рабочие органы повышают производительность независимо от тягового класса и массы трактора, исключает потребность в балласте и сложных движителях для выполнения энергоемких процессов почвообработки, открывают новое направление развития технологий, повышения эффективности движения и улучшения эксплуатационных качеств при работе в любой зоне земледелия, регулирования тягового класса трактора независимо от массы, снижения количества движения /массы и скорости/.
Граблина, лопата и другие рабочие органы для перемещения материала в одну сторону имеют шарнир и ограничитель для рабочего хода в одну и холостого в другую сторону. При этом рыхление материала при движении рабочего органа в одну сторону и перемещение в другую повышает эффективность работы при очистке, строительстве дамб, дорог, каналов, траншей и других сооружений. Такими рабочими органами можно получить движущую силу, превосходящую несколько номинальных значений тяговой силы трактора. Это упрощает ходовую часть и повышает проходимость.
При совмещении функций компонентов техники: двигателя, трансмиссии, механизмов управления и торможения, гидросистемы, системы охлаждения в качестве рабочего материала можно использовать топливо или масло, снизить число баков, автономных систем и марок материалов. Возможность торможения, подъема орудия, охлаждения и поворота топливом или маслом обеспечивается выбором соответствующих материалов, имеющих сродство с техническими компонентами.
Сумма механических и гидравлических элементов, их масс и затрат при выполнении одной функции и их совмещении отличается в два три раза, например, число колес при работе реверсивных рабочих органов можно снизить в 2-3 раза. При этом ограничения мощности, производительности, проходимости, зависимости от погоды, крутизны склона и человеческого фактора ослабляются, снимается масса и стоимость, сокращается число проходов агрегата по полю, повышается эффективность использования металла, энергии, земли, влаги, времени и средств роботизации.
Рабочий орган или секция (фиг.7) смещение оси для самоповорота в режим якоря и регулирования ширины захвата. Поочередная остановка и движение дает непрерывное движение - шагание рабочими органами.
Технологизация (преобразование ущербов в пользу) сил, масс, скоростей, движений - многофункциональность масс, сил, сопротивлений, скоростей) снижает балластность, опасность, металло-, энерго-, время-, влаго-, ресурсозатратность техники и технологий, дает многоуровневую и многоотраслевую пользу.
Многофункциональность основных компонентов машины сводится и к преобразованию значений и знаков векторов сил.
Многофункциональность машины заключается в замещении функций систем машин. Многофункциональность массы заключается в выполнении технологических операций, динамических /силовых/, управляющих, аккумулирующих энергию операций.
Многофункциональность рабочих органов заключается в выполнении, изменении и преобразовании технологических процессов, динамических и управляющих действий, содействий полезной работе и противодействий уводу от курса и базовой линии, режима нагрузки. Это достигается очувствлением, установлением новых связей для адаптивного саморегулирования. Такие эффекты "очеловечивают" машину, повышают гибкость функций, "интеллект", преобразуемость ущерба человеку, технике и природе в пользу без обострения и обрастания проблем - ущербного развития.
Рекордных значений показателей достигли: широта функций машины, опорно-технологические и динамические свойства рабочих органов, конструктивно-, технолого-, кибернетико-, энерго-, аккумулирующие функции массы, силовой, опорной проходимости, экономии энергии, металла, времени, влаги, ресурса в 6-100 раз, безопасности работы в воде, огне, на зараженном и опасном полях, в горном земледелии и на аварийно-спасательных и землеройно-, строительно-, культурно-, технических работах.
Превосходство мирового уровня техники и технологии решения общечеловеческих проблем достигнуто применением новых явлений, законов и методов развития без обострения и обрастания проблем /гуманизацией/ путей их решения, включающие:
1. Повышение совместимости принципов металло-, энерго-, влаго-, время-, почво-, ресурсо-, человекосбережения и преобразования ущерба в многоотраслевую пользу.
2. Очувствления (полуроботизация, расширение и совмещение функций технологичности, безопасности, эффективности динамичности, управляемости и интегрируемости эффектов, законов и методов).
3. Малоэнергозатратности работы и сочетаемости функций.
4. Адаптивное саморегулирование и повышение качеств машины.
5. Распределение энергии между движителями по реакциям и курсу.
6. Квазистатизацию процессов управления, приближение передаточных функций к передаточным числам систем управления, при низких подачах и скоростях движения и выполнения опасных работ.
7. Получение и применение упреждающей информации для оценки, управления без запаздывания, сближения процессов возникновения и устранения ошибок саморегулирования.
8. Преобразуемость и совместимость силовых и управляющих энергопотоков, регулируемость энергосберегающих режимов (формул ходовых систем и источников энергии).
9. Преобразуемость и расширение функций машин, масс, рабочих органов и сопротивлений при выборе режимов безопасности, технологичности, динамичности, управляемости.
10. Явление холодоспелости почвы, регулируемости сроков и использования биоклиматического потенциала и создания условий для улучшения качества жизнеобеспечения во всех странах.
Смещение точки приложения сил вперед, а торможения назад (реакторов, якорей, спинок в задней части) создает поворачивающий момент и силы врезания полевой грани и боковины отвала в стенку и дно борозды. Это усиливает сопротивление отходу назад (реакцию). Толкающая сила, пропорциональная реакции, возрастает, и эффективность шагания повышается.
Избыток реакции, движущей силы шагающих рабочих органов достаточен для движения машины и тяги тормозных рабочих органов. Сила сопротивления упоров
Руп=Ршаг+ΣРс+Ртор,
где Ршаг - сопротивление шагающей вперед секции,
ΣРс - сумма сопротивлений движению машины с учетом подъема, веса, внешнего сопротивления,
Ртор - противление тормозных рабочих органов для дообработки почвы.
Здесь сумма сопротивлений движению машины по стенам зависит от груза, прочности упоров (опор) на окна. Эффект якоря дна и стенки борозды или поверхности поля возрастает защемлением земли, углом сжимающего воздействия рабочего органа на землю.
При каждом шаге рабочие органы совершают работу, соответствующую их назначению, тянут или толкают рабочие органы и вою машину, т.е. совмещают технологические и динамические безопасные для человека, техники и природы функции. Установка сменной опоры сужает функции, оставляет транспортное движение. Увеличить шаг до 10-15 м. при малом габарите ногой-манипулятором можно вдоль и поперек поворотом ног рулем. Очувствленность и многофункциональность машины, ее массы и рабочих органов повышают дублирование и резерв функций. Здесь масса также является регулируемой сцепной силой, крошителем комков после вспашки, управляющей силой при рабочем, аварийном и автоматическом управлении тормозами, преобразователем кинетической энергии в потенциальную и обратно, саморегулятором нагрузки и эластичности привода, т.е. выполняет много технологических, динамических, управляющих и преобразующих функций в режимах их саморегулирования.
Рабочие органы и масса преобразуют функции, сопротивления, силы движения, управления курсом, глубиной хода, нагрузкой двигателя, торможением, сцепной, тяговой и тормозной силами.
Привод рабочих органов и колес является многоцелевым делителем /распределителем/ потока энергии между колесами с учетом курса, реакций, траектории, рельефа, т.е. заменителем трансмиссии, механизмов поворота, саморегулирования: скорости, торможения, повторности обработки земли, сопротивления, нагрузки, чередуемости операций при перемещении рабочих органов относительно энергосредства. Соотношение технологических, динамических и управляющих действий рабочих органов определяется очувствленностью и настройкой ширины, скоростей движения и обработки земли. Увеличение ширины захвата машины с ведущими рабочими органами и совмещение операций снижает холостой ход, массу, потери времени на обслуживание.
Саморегулирование функций закономерно связано с сопротивлением рабочих органов: при нормальной работе энергия расходуется на выполнение технологического процесса, а управляющая работа снижается до нуля при нормальной силе, так как технологическое перемещение рабочих органов без подъема и подачи, без управляющего хода имеет нулевой или околонулевой путь. Такая квазистатическая работа управления при высокой готовности силы совершать подъем и/или подачу вперед, но не совершает, при малом приращении силы достигает порога чувствительности, после чего действует быстро /снижает запаздывание/, сопротивление преобразуется в силу управления, технологическая функция инициирует динамическую управляющую работу без непрерывного отбора мощности, дифференцирует саморегулирование сопротивлений, сил подъема и подачи, догрузки и разгрузки.
Саморегулирование и самопреобразование сил и функций - эффект малоэнергозатратного "самосервиса", быстродействия, самостабилизации мощности и нагрузки повышает уровень "интеллектуальности" техники, технологий, человека и способа использования.
Адаптивное малоэнергозатратное саморегулирование функций масс, энергопотоков, рабочих органов, технологического процесса в динамический и управляющий процессы самопереключения без датчиков, усилителей, без непрерывного отбора мощности устраняет ущерб технике, почве, человеку, экологии, экономике.
Адаптивное самопреобразование сопротивлений рабочих органов в управляющее движение без ходовой части дает экономию металла, энергии, ресурса.
Безопасное управление, торможение, движение по снегу, гололеду, болотам, склонам, воде многократно снижает число типов движителей и ходовых систем при использовании быстросменных инструментов в динамико-, технолого-управляющем режиме. Получение управляющих сил из сопротивлений по законам саморегулирования с учетом реакций и ускорений в кинетостатике. Эффект многоуровневой гибкости функций и утилизации энергии включает: изменение и преобразование рабочих процессов, систем газотеплообмена без отбора мощности насосом, вентилятором для уничтожения энергии; соединение выхлопных газов с энергией воздуха обдува для подогрева зимой и охлаждения салона летом и/или утилизации, питания электролизера, пневмо-, паропривода, квазиадиабато-, водо-, дизело-, колоризаторного режима саморегулирования цилиндрово-функциональной формулы; саморегулирование цилиндрово-тормозной формулы отбором воздуха при торможении, накоплении в баллонах или подвесках для наддува при разгоне и выполнения динамических, управляющих и технологических функций без отбора мощности и затрат металла, ресурса, труда, очувствление и совмещение функций усилителей и утилизаторов.
Эстафетное горение беднейшей смеси с пневматизацией, адиабатизацией, формулу - режиморегулированием, самопереключением, самозащитой по упреждающему сигналу, эффектом малоэнергозатратности совмещения функций двигателя, тормоза, утилизатора; сочетание способов саморегулирования режимов и оценки работы по критериям малоэнергозатратности преобразований и функций, на основе гибкого применения законов, явлений и методов без усложнения работы и проблем или замены проблем электро-, пневмо-, гидрооборудования, торможения, управления, контроля и оценки облегчают совмещение функций генератора, электротормоза, датчика скорости, нагрузки, торможения и утилизации избыточной энергии при торможении, стартера, электродвигателя в режиме электромобиля по заданию человека, и/или спидометра, регулятора топлива и/или скорости, ограничителя оборотов, датчика тормоза, аккумулятора, электролизера.
Пути преобразования машин - конвертации обрастания и обострения проблем в их решение:
1. Преобразование трения (потерь ресурса) в притирку и ресурсосбережение, приближение функций завода к земледелию.
2. Преобразование функций машин, техпроцессов и торможений в движение, сопротивлений реакторов в силы, сил торможения в энергию утилизатора, двигателя - в тормоза-утилизатора, а также тактов и охладителей двигателя» муфт оцепления, датчиков, догружателей, разгружателей, подвесок, колес, рабочих органов.
3. Тормозов уничтожения энергии и ресурса, утилизаторов, приборов силового гидро- и электрооборудования, рассеивателей энергии (насосов, тормозов, вентиляторов).
Повышение конвертированных функций допускает упрощение или снижение числа оригинальных узлов и машин до двух порядков.
Сокращение номенклатуры изготовляемых деталей и машин, преобразований тяговых и тормозных машин повышает серийность и массовость проката деталей, следовательно, снижает затраты на производство, расход металла, оборудования и затрат труда.
Снижение числа оригинальных конструктивных и алгоритмических решений облегчает их экспериментальные испытания, опытную и макетную проверку и оценку. Поэтому увеличение конвертированных функций сблизило к нулю число оригинальных решений и превратило обострение или обрастание проблем в их решение с большой выгодой всем. Преобразование множества институтов и испытательных станций, их затрат и задержек в автора-оценщика.
Неочевидное преобразование проблем и величайшего ущерба в пользу мирового сообщества имеет общечеловеческое значение. Жизнеобеспечение такой техникой создает достаток продуктов, выносит приговор нефтевойнам, бедности, террору.
Многорежимные, многофункциональные, самоочищающиеся, самозащищающиеся, самореактивные (самоупорные, самоякорные) взаимодействующие, шагающие рабочие органы, - адаптивно преобразующие технолого-, динамико-, защитно-, кибернетико-, информационные, энергопотоки и действия имеют высокую очувствленность, сверхвысокую силу, широкий шаг и саморегулируемость нагрузки при обработке земли.
Фундаментальность многофункциональности свойств взаимо- и самоуравновешивания сил и сопротивлений рабочих органов заключается в преобразуемости шагающих технологических, динамических, управляющих и информационных свойств в сверхсопротивляющейся среде (почве, грунте), сочетаемости продольного и поворотного ходов сменных рабочих органов. Это допускает унификацию машин различной мощности и упрощает эксплуатацию машинно-тракторного парка, автоматизацию и электрификацию технологических процессов; освобождает народ от парка различных тракторв и систем машин; реализует металло-, энерго-, почво-, водо-, время-, человеко-, ресурсосберегающий принцип.
Большая сила при малой массе, скорость, технологичность, совместимость функций, мобильность, проходимость и безопасность аварийно-транспортных работ, сменность рабочих органов, упоров и режимов шагания, надежность управления, расширение функций реверсивных рабочих органов и машин допускают работу без ущерба технике, земле, растениям, влаге, человеку. Даже тормозные машины при этом снижают опасность на вспашке, лущении, рыхлении, культивации, посеве, землеройно-, дорожно-, аварийно-, строительно-, спасательно-, культурно-, технико-, гидромелиоративных работах.
Шагающими рабочими органами и движителями преобразуют множество машин, сложность рабочих органов и ходовых систем тракторов, бульдозеров, грейдеров, подъемников, пожарных, боевых, тяжелых и легких транспортных средство ледо-, водо-, склоно-, снего-, болотоходов, чрезмерно усложняющих проектирование, производство и использование машин.
Замена машин рабочими органами-преобразователями технологических, динамических /силовых/, управляющих, опорных, мобильных, кинематических, защитных и информационных функций в десятки раз облегчают проектирование и конструкцию, снижают стоимость производства и применения.
Преобразование последовательного управления колесами, машиной, например культиватором, в поворот дисков или смещение лап около передней оси исключает запаздывание, ориентирование трактора и машин на склон или противоречивое действие передней оси и навешенной сзади машины.
Шагающее движение без карданных валов, коробок передач, мостов, дифференциалов, сложных ходовых систем допускает изменение ширины захвата или колеи, базы, радиуса поворота, крена и использование колес малого диаметра в качестве регулятора колесной формулы, силы, скорости, продольное и поперечное движение руками и ногами, рабочими органами, режимов и функций.
Распределение энергии между потребителями и движителями с учетом приоритетности и очередности выполнения функций, реакций реакторов, спинок и сопротивлений рабочих органов, курса, траектории движения, радиуса поворота, допустимости и потребности колебаний и режимов работы дает эффект малоэнергозатратнооти, совместимости, саморегулируемости функций.
Рабочие органы перемещают вперед на шаг без выглубления, останавливают, реактором удерживают от отхода назад при перемещении других рабочих органов и машины, сочетая силовые и технологические функции, снижают опасность.
Упорами на окна совершают шагающее движение по стенам высотных домов.
Сопротивление упоров и/или рабочих органов изменяют с возможностью преобразования в движущую силу.
Энергоемкие процессы обработки материалов (земли, грунтов и т.д) шагающими рабочими органами, преобразуя технологические и динамические функции реакторами /упорами/, снижают ущерб технике, природе и обществу. Шагающее движение и реверсивное поперечное перемещение рабочих органов согласовывают, силу регулируют изменением сопротивления спинки - реактора-упора с возможностью работы в воде, под и над водой, при очистке и строительстве каналов, траншей, движении по стенам домов при пожаре, аварии, спасении людей, где пожарная лестница неприменима, а веревочная лестница шагающей по стенам машины решает все проблемы комплексно и высокоэффективно.
Изменением скорости движения и разности скоростей бортов шагающего движения поворачивают машину.
Изменением длины и угла поворота рук (шага и направления движения) обеспечивают движение по вертикали вверх и вниз и горизонтали (вправо и влево) стен домов. При этом двигатель поворачивают почти на 90° или подвешивают как маятник при движении по стенам, склонам различной крутизны. Функции машины изменяют применением сменных инструментов и соответствующих режимов настройки.
Перестановкой упоров - изменением знака сопротивления реверсируются шагающие движители. При рабочем ходе назад и холостом ходе вперед в процесс шагания вносится холостой ход и рабочий ход буксующий на всех работах, - создает избыток сил и требует тормозных рабочих органов. В каждом случае, движение может быть поочередно шагающее или шагающее двумя ногами вместе.
При дифференциальном приводе рабочих органов очередность шагания и скорость рабочих органов определяются их сопротивлениями: секция или рабочий орган с меньшим сопротивлением шагает быстрее, чем секция с большим сопротивлением.
Разность скоростей бортов шагающих движителей регулируют известным способом привода гусениц.
При встрече рабочего органа с камнем он останавливается, поднимается (выглубляется) и защищается. Такое адаптивное технологическое шагание обеспечивается легко дифференциальной связью привода и подъемника рабочих органов и дает согласование технологических, динамических и управляющих функций машин. Число шагающих рабочих органов определяет производительность (ширину, скорость). Прерывание скорости допустимо для легких машин, непрерывность для массивных, но все они имеют малую ширину. Сочетание шагающих рабочих органов (для подачи) и реверсивных рабочих органов поперечного хода в широкозахватной тихоходной машине для выполнения всех совместимых техпроцессов за один проход повышает эффективность использования потенциала климатической зоны. Это допускает работу зимой в период холодоспелости, безопасности для человека, техники и природы /чистота воздуха, легкость работы в мастерских летом/.
Рабочие органы продольного хода повышают скорость машины, а реверсивные рабочие органы поперечного хода повышают ширину захвата, снижают скорость. Сочетание и согласование их работы стабилизирует нагрузку двигателя. Сплошная обработка требует равенства шага ширине захвата рабочих органов поперечного хода.
Сопротивление движению рабочих органов назад, силу упоров, спинок, почвозацепов можно повышать в 10-100 раз. Упорами на окна можно шагать по этажам по внешней стене при пожаре, спасении людей, по столбам, склонам в качестве подъемка грузов, аварийного заменителя лифта, ремонтника и т.д.
Преобразование полевой доски плуга (бокового упора-поглотителя) 15-30% силы в источника на порядок большей силы, а также почвоуглубителя - источника сопротивления в толкателя, реактора, увеличителя до 1000% силы создает достаток сил и эффект безопасной, малоэнергозатратной динамизации технологического процесса и машины «сверхвысокого динамического фактора» преобразования ущерба в полезную силу, распределения энергии между потребителями с учетом полезности функций, курса, режима настройки. Самоповорот шагающего рабочего органа до превращения в якоря, упора удержания, самопреобразование, совмещение многоцелевых технологических, динамических и тормозных функций открывает шагающим машинам, эффективным технологиям и принципам совмещения функций движителей и машин» упрощения конструкции, производства и использования на легких многоцелевых машинах различной мощности и производительности. Аналогично зуб в режиме якоря преобразует рыхление в шагающее движение, диски выполняют лущение, лопаты - землеройные и аварийные работы в различных отраслях.
Шагающие сменные режимные рабочие органы для обработки земли (почвы и грунтов) поочередно преобразуют технологические, динамические и управляющие функции и режимы (толкания, тяги, удержания, прерывного и непрерывного движения, избытка, достатка, недостатка силы высокой и/или низкой скорости разного захвата от продольного до поперечного ходов).
Привод рабочих органов с реакторами (упорами) поочередно толкает, останавливает, упорами исключает обратный ход, выполняет различные технологические процессы, динамические и управляющие функции в шагающем режиме в желаемом направлении, допускает изменение ширины захвата и скоростей движения.
Сопротивление рабочего органа обратному ходу (реакцию) повышают упорами спинками, почвозацепами так, чтобы толкающая сила, равная удерживающей реакции, была достаточной для преодоления внешнего сопротивления движению. Движущая сила и сопротивление упоров не зависит от веса, сцепления колес, их буксования и определяется мощностью двигателя.
Проходимость достаточна для шагания по стенкам домов с упорами, опорами на окна.
Шагающие рабочие органы для вспашки, рыхления, лущения, культивации, бульдозерной, грейдерной и т.д. обработок поочередно останавливаются, удерживаются от отхода назад упорами при толкании других рабочих органов. Чередование рабочих шагов, остановок дает толкающую силу, работает аналогично шаганию человека, но при каждом шаге вперед рабочий орган выполняет технологический процесс, при каждой остановке упора машина перемещается вперед на шаг. Шагание рабочих органов правого и левого бортов можно изменить по значению и знаку для поворота и разворота.
Рекорды шагающих рабочих органов и их возможностей: шагание по стенам при пожаре и спасении людей в высоких домах, число типов опор и рабочих органов, силовая и тяговая проходимость, преобразуемость проблем в их решения, минимизация оригинальных проблем и решений, компактируемость, устойчивость против опрокидывания и сползания, экологичность, защита почвы от уплотнения до обработки, преобразуемость технологических движений в силу (динамическое действие) без колес и их силы, надежность шагания по препятствиям, число общечеловеческих проблем, снижение затрат топлива, металла, воды и выбросов в атмосферу, опасных работ и множества индикаторов, способ и машины для решения проблем избытка воды на севере и недостатка в других регионах для рационального использования земли и техники. Множество машин, сложность рабочих органов и ходовых систем тракторов, бульдозеров, грейдеров, пожарных» боевых, легких и тяжелых транспортных средств, снего-, склоно-, болотоходов чрезмерно усложняет проектирование, производство и использование машин. Это затрудняет жизнеобеспечение людей.
Замена множества машин рабочими органами-преобразователями технологических, динамических, управляющих, опорных, мобильных и кинематических функций в десятки и сотни раз облегчают конструкцию, снижают стоимость их производства и применения.
Основные оригинальные конструктивные, функциональные, динамические, управляющие решения экспериментально проверены в опытных и макетных образцах, сменных рабочих органов шагового хода. Это облегчает освоение технологий и техники.
Технологические, рулевые, саморегулирующие и защитные функции ведущих рабочих органов, их носков, упоров, полевых досок, ограничителей самоповорота, лемешно-отвальных поверхностей саморегулирования якоря создают ведущие, управляющие, направляющие силы, отличающиеся пропорциональностью сопротивлению, самосогласуемостью и саморегулируемостью работы, динамики (силы), управляемости (устойчивости и поворотливости) в сопротивляющейся среде.
Совмещение функций упрощает структуру машины и дает эффект малоэнергозатратности и упреждаемости управляющих действий, создает условия для сближения источников сил и потребителей, очагов возникновения и устранения ошибок. В каждом случае возможность подачи выходного сигнала на вход управления ведущими рабочими органами повышает потенциал надежности на порядок за счет высокого сцепления с почвой.
Преобразование технологических, динамических и эргономико-кибернетических свойств направляющих рабочих органов и их ограничителей поворота и реверса облегчают роботизацию вождения, коррекцию повторности действий, ход на склоне и влажном поле, повышает интеллект машины, человека и природы с учетом биоклиматического потенциала местности, времени года (летом и зимой), в засушливой и поливной зонах. При очистке и строительстве дорог, дамб, каналов, плотин, работе на и под водой, дноуглоблении рек, сооружении берегов, мелирации, гидромеханизации и выполнении культурно-технических работ сочетаемость технологических, динамических и управляющих функций допускает дистанционное управление.
Мировой уровень технологий и техники характеризуется тем, что техника обходится очень дорого: 60-80% массы и стоимости трактора-продукта труда шахтеров, металлургов, машиностроителей и энергетиков используется для получения тяговой силы с очень большим ущербом почве, ресурсу и экономике. Почвомашзаводы 100% металла используют для реализации тяговой силы. Тракторы и машины работают в режиме тяги и торможения и на "противодействие" тратят энергию, ресурс и время. Понятие о содействии колес и рабочих органов учеными воспринимается тяжело. Поэтому пояснение принципа и перспективности решения проблем, взаимосвязей параметров укажем с недостатками и ущербом в скобках за некоторыми показателями техники:
1. Массы от 1,5 до 15 тонн различных классов /повышение числа машин различной ширины захвата, базовых линий и проходов по полю, потери до 85% энергии, времени, влаги и урожая до 30%.
2. Силы и класса тяги /удвоение затрат металла и энергии, стоимости производства и применения; повышение в 10-100 раз числа машин различной ширины захвата. Буксование и уплотнение почвы, сдвиг, потери ресурса, агросроков, влажности/.
3. Коэффициента сцепления - преобразования массы в тяговую силу /уплотнение и осушение полей до вспашки; повышение сопротивления, энерго-ресурсозатрат, числа машин-орудий, типов ходовых систем, их проходов по полям, потерь времени агросроков, влаги, урожая и технологической полезности и перспективности; отчуждение земли "приговор" биополезности техники, экономике, экологии, КПД, т.к. повышает: производительность техники и человека /не растений/ в гектарах, физический гнет, массу, число колес и рабочих органов и обработок поля, колесно-, затратно-, ущербно-, нагрузочно-, агротеррор.
4. Скорости /повышение опасности, числа проходов, энерго- и ресурсозатрат; обострение проблем: механизации и роботизации, эргономики, здоровья, человеческого фактора, числа и цены ошибок, эффективности и экономичности/.
5. Производительности техники и человека /без учета ущерба экономике, биопродуцированию, росту растений, урожаю от масс, сил, скоростей, а также рост времени и цены простоев техники пропорционально числу машин, движителей, рабочих органов, мощности/.
6. Управляемости - способности сохранять и изменять курс без очувствления компонентов машин /зависимость от реакции, 1,0-1,5 тыс./, решений и действий человека, энергопотоков, холостого хода, усилителя, сил тяги, рельефа, торможения сцепления, скорости и нагрузки; потребность в поворотных полосах, отсутствие поперечного хода, нулевого радиуса; непрерывность контроля, напряженность и опасность работы, отсутствие колес-датчиков курса и связей с усилителем/.
7. Проходимости /повышение числа и размеров колес, массы, потерь энергии и ресурса, влаги, технологический ущерб почве/.
8. Тягового КПД /сила, скорость, губительность для почвы и растений, энерго-, время-, металло-, ресурсо-, влагозатратность при обработке земли, ущерб, тяги и массы/.
9. Технологичности машины /совокупный ущерб от увеличения массы, силы и скорости заводам, земледелию, экологии, экономике и всему обществу из-за: отрыва от условий для роста растений, использования массы с большим технологическим ущербом, невозможности преобразования этого ущерба в технологическую пользу без преобразования в тяговую силу и ущерб. Здесь масса относится к потребностям, затратам и фактору получения силы, проходимости, КПД, производительности, но не технологичности/.
Преобразование массы в технологический фактор совершает переворот в развитии техники и технологий, снижении длины широкозахватного агрегата до одного метра, буксования до нуля без обезображивания полей и технологий. Вековая практическая работа сельхозмашин с тормозными работами органами и практическая проверка ведущих рабочих органов плуга подтвердили, что для комплексного решения проблем безопасности, экологичности и экономичности необходимо трение полевых досок плуга о борозду преобразовать в копирование стенок борозд /в автовождение/ и защиту природы с очень большой выгодой, - преобразовать большой хозяйственный ущерб потери 30% энергии, производительности, на уплотнения, затертости и уничтожения ресурса ходовой части и механизмов управления/ в пользу, - в устранение ущерба (упомянутого), - в экономию энергии и ресурса (в снижение буксования) и повышение ширины захвата.
Устранение полевых досок и преобразование их реакций в движущую силу ведущих рабочих органов разгружает колеса и повышает ширину захвата на порядок и снижает скорость и число проходов по полю. Такое преобразование противодействий ходовой части и рабочих органов в их содействие без холостого хода рабочих органов в 34 раза снижает массу, стоимость, число проходов и уплотнение почвы до обработки.
Копирование двумя колесами борозд при большой ширине и низкой скорости, а также совмещении операций в 20-30 раз снижает перекопирование борозды и число ошибок управления /вождения широкозахватного агрегата/.
Превращение тракториста-водила - раба техники в ее контролера, решение множества проблем науки, производства и общества с огромной пользой природе тоже заслуживает внимания.
Совместимость функций элементов создает основы для качественного развития мобильных энергетических средств и рабочих машин, это допускает переход от унификации элементов и модулей к унификации функциональных возможностей, от однофункциональных узлов машины к многофункциональным, множество свойств которых основано на малоэнергозатратном принципе. Правила и законы обратимости и совместимости функций взаимосвязаны и расширяют функциональные возможности техники в зависимости от времени. Поэтому универсализация техники приобретает качественно новое направление, заключающееся в повышении числа совмещенных и согласованных функций и действий, в переходе от изоляции проблем и процессов к их единению, интеграции решаемых проблем науки в реальной среде, расширению функциональных возможностей человека и машины в период выполнения производственного процесса. При этом ряд легко познаваемых при работе в поле явлений облегчает управление на качественно высоком уровне замещения функций механизатора техническими средствами и развития связей в системе машина - местность.
Технологические и инженерные основы совмещения функций, без увеличения числа элементов применительно к муфте, подвеске, тормозу, движителям, рабочим органам, электрическим и тепловым машинам и т.д. допускает их работу в таком качестве, как:
1. Муфта сцепления, датчик моментной нагрузки, стабилизатор нагрузки, средство оценки и управления трансмиссией, тормозами и двигателем, эластичный привод, объемный привод, утилизатор энергии.
2. Подвеска, утилизатор и накопитель энергии, стабилизатор загрузки двигателя и опорных реакций, аварийный тормоз и источник энергии для усилителя тормозов.
3. Тормоз, насос, утилизатор энергии сил инерции, мотор объемного привода, преобразователь энергии накопителя и утилизатора энергии тепла выхлопных газов, сил инерции при торможении и колебания рамы при движении по неровной поверхности; силового регулятора и корректора вертикальных нагрузок, синхронного гидравлического отбора мощности для привода осей прицепов и орудий, а также муфта.
4. Генератор, тормоз, стартер, электродвигатель, стабилизатор нагрузки двигателя, датчик скорости и т.д.
5. Двигатель, компрессор, тормоз, датчик нагрузки /реактивной силы/.
6. Регулятор расхода топлива, датчик скорости, информационного обеспечения и управляющего воздействия; регулятор нагрузки, напряжений почвы и тормозной силы; включатель режима и световых указателей для упреждающего, предупреждающего воздействия на водителя попутного транспорта.
7. Дифференциал, датчик разности сопротивлений бортов, скоростей и реакций почвы, исполнительный элемент механизма поворота, корректор курса, средство исключения простого дифференцирования и поворота радиусом, равным нулю, делитель потока энергии между движителями с учетом реакций почвы и курса, гидромашина /насос и мотор/.
8. Бортовой редуктор, гидротормоз - насос, мотор объемного привода, утилизатор энергии при торможении, регулятор скорости и разности скоростей бортов - механизм фиксированного поворота без торможения, средство исключения циркуляции паразитной мощности между движителя ми при движении по плотной неровной поверхности.
9. Колесо, датчик курса, радиуса фиксированного поворота без торможения, скорости и нагрузки по напряжениям почвы, отклонения от базовой линии; корректор курса, центр поворота, регулятор режима работы, заменитель полевой доски плуга.
10. Рулевое управление, ограничитель скорости, датчик делителя потока энергии между движителями.
11. Цепи управления, настройки, согласования функций, информационного обеспечения, линии утилизации энергии, защиты, коррекции, стабилизации нагрузки, энергопотоки и т.д.
12. Испытание техники, использование информации для диагностики, обучения, оценки управления и контроля.
13. Согласование скоростей движения, поворота, возникновения крена, выравнивания рамы, изменения нагрузки, реакций почвы, защиты агрегата, эффективности тяги, ведущих моментов, утилизации энергии, испытания, торможения.
14. Управление двигателем, муфтой сцепления, коробкой передач, тормозами и механизмами поворота трактора и подъема оси, силового регулирования и догружения ведущей оси.
15. Ведущий момент, параметр регулирования сил тяжести, тяги и торможения, жесткости подвески, силового регулирования орудия.
16. Управление педалью тормоза, регулятором топлива, заслонкой в выхлопной трубе, генератором, коробкой скоростей, тормозом.
17. Контроль, оценка машины и технологий, управление режимом нагрузки, ограничение напряжений почвы и буксования, изменение числа осей и тягового класса.
18. Энергопотоки к колесам и рабочим органам, работу приводов колес и рабочих органов, линия регулирования жесткости подвески по грузу, высоты рамы /кузова/.
19. Технологические процессы обработки почвы /пахота, рыхление, выравнивание поверхности, прочесывание почвы, образование валиков, грядок, оросителей, рядов камней и сорной растительности, внесение удобрений, посев, уплотнение почвы, преобразование сопротивлений рабочих органов при выполнении этих процессов в движущую силу/.
20. Центр фиксированного поворота, датчик сползания агрегата вниз по склону, подъема орудий, регулирование разности скоростей, торможение до остановки при нулевом радиусе поворота, угла поворота, конца торможения, опускания, подъема, начала движения, включения датчиков курса и управления орудиями.
21. Процессы упреждения информации, согласования работы машины и внешнего влияния, сближения динамических процессов и статических.
22. Базовая линия для автовождения, линия полива, или питания, различия контрастности плотностей почвы до и после ее обработки, центр разворота или место реверса движения.
23. Рама, источник энергии для поворота, торможения, грузовой аккумулятор, корректор силы тяги, сопротивления орудия и тягового класса, стабилизатор нагрузки.
24. Сиденье, датчик стабилизатора склонохода и тормоза-ограничителя скорости.
25. Тяговая сила, параметр регулирования сцепной силы тяжести, самой силы тяги и тягового класса трактора, сила сопротивления рабочего орудия, дополнительная движущая сила, фактор неограниченного повышения производительности и мощности, эффективно реализуемой независимо от типа ходовой части трактора и т.д.
26. Рабочие органы, движители, средства оценки движения, торможения, обработки и восстановления структуры почвы без уплотнения, датчики изменения условий работы и упреждающего сигнала об изменении крутизны склона.
Совмещение и согласование функций зависит от времени, режима работы, условий эксплуатации, степени унификации функциональных модулей, наличия новых элементов связи между ними и органами управления для необходимого сочетанья функций, а также получения информации для оценки, управления, исследования и оперативного изменения структуры элементов агрегата в зависимости от технологического процесса. Решение таких задач применительно к вопросам развития человека, техники и науки затрагивает научный анализ, поиск, определение целей, обучение, обсуждение, проектирование, изготовление, испытание, анализ результатов, поиск новых путей и целей и т.д., а также изучение конструкции, теории, анализа и расчета, проектирования, изготовления, испытания, реальную работу, оценку, аттестацию, экспертизу.
На основании изложенного можно отметить, что резервирование металла в узкофункциональных блоках на энергетических и технологических модулях ведет к увеличению энергозатрат и стоимости. Часто требуются обслуживающие средства большой мощности и кратковременного действия. Такой подход имеет перспективу в смысле электронизации, т.к. анализ и синтез средств управления, получения и применения упреждающих сигналов о взаимодействии машины и почвы подтвердили целесообразность практического применения нового принципа исследования совмещения, согласования, обратимости и замещения функций при стыковке локальных систем управления, оценки и защиты для оптимизации времени действия средств автоматизации, а также энерго- и материалосбережения. Надежность управления и защиты при этом можно существенно повысить путем применения гравитационных сил (массы) для согласования действий. Поэтому принцип может быть неотъемлемой частью современного анализа энергопотоков и указывает на целесообразность перехода от исследований необратимых энергетических потерь, расхода топлива на выполнение технологических и управляющих функций к новому принципу исследования согласования, замещения, совмещения и обратимости энергопотоков и энергосберегающих функций усилителей, средств управления и обслуживания энергетических и технологических модулей. Предложенный принцип облегчает синхронное решение проблем развития техники, науки и образования, так как знание реальных процессов облегчает поиск путей дальнейшего развития. При этом согласование, совмещение и обратимость функций обеспечивает:
1. Снижение числа независимых модулей, металлоемкости и энергозатрат, увеличение времени работы элементов и функций. Возможность участия большого числа специалистов и ускорение научно-технического прогресса.
2. Повышение надежности, облегчение управления и контроля, производства и эксплуатации техники, обучения и применения достижений науки.
3. Решение множества проблем вместе без их изоляции и дробления знаний и условий.
Анализ полезности и вредности функций и действий, ограничений свободы, принципов получения и использования информации, оценки и управления энергопотоками позволил установить следующее:
- смягчение ограничений расширяет функции и объем информации;
- ранжирование функций на каждом этапе должно соответствовать теории и закономерностям согласования процессов;
- свобода действий элементов без контроля и регулирования повышает неопределенность;
- упреждение информации создает условия для придания динамическим процессам качества статических явлений;
- энергопотоки нормируются по времени функционирования;
- обратная связь является последствием и вероятным действием нуждается в упреждающей информации и действии цепи управления.
Рабочая (функциональная) характеристика трактора, полуагроробота и многофункционального энергетического модуля должна отражать тяговые, динамические, экономические и экологические качества. Энергооценка должна быть упрощена до уровня, доступного механизатору.
Особый интерес представляет совмещение функций тяговых, приводных, технических, обслуживающих и транспортных модулей для универсализации энергетических модулей, снижения затрат на производство, эксплуатацию и хранение, повышения времени и эффективности работы, совершенствования конструкции и реализации преимуществ специализации, массового производства и всеобщего пользования на единой научно-методической основе с набором технологического оборудования и рабочих органов для выполнения множества упомянутых функций в различных зонах.
Высокий уровень общего всегда стимулирует развитие и частного. Поэтому эффективность обобщающей теории способствует развитию частных теорий в интересах решения общих и частных задач, следовательно, вопросы формирования траектории движения и режимов работы, безопасности, эргономической, экологической и технологической эффективности тесно связаны, и высокий уровень общего способствует повышению уровня технологических процессов.
Надежность энергетической установки, трансмиссии, ходовой части и т.д. облегчает вспашку, а рабочий орган-движитель исключает необходимость в больших силах тяги и тяжести, т.е. приближает к унификации трактора и автомобиля, создает условия для вспашки агрегатом из одноосного энергетического модуля и комбинированного орудия для выполнения стартовых и финишных операций почвообработки и посева.
Более конкретное применение принципа преобразования сил и расширения тягового класса трактора независимо от его массы при почвообработке позволяет:
- на 40% экономить топливо к снизить металлоемкость;
- на 200-300% повысить производительность;
- в 10 раз снизить буксование и уплотнение почвы;
- сократить число механизаторов в 3÷4 раза;
- исключить отрицательное влияние массы на почву, урожай, ресурс, энергозатраты и грузоподъемность;
- исключить ограничения мощности и производительности;
- облегчить развитие теории, анализа и расчета тракторов и автомобилей для комплексного решения основных вопросов их развития.
Широкий диапазон изменения скоростей движения, простая и эффективная многофункциональная подвеска и навеска повышают уровень каждого специального модуля и делают его универсальным, возможность изменения жесткости подвески и навески (грузоподъемности) открывает путь решению вопросов адаптации мобильной машины к средствам автоматизации, условиям эксплуатации повышает эффективность выполнения множества функций и транспортных операций, т.к. плавность хода и параметры подвески ограничивают скорость и производительность.
В сельском хозяйстве это ограничение проявляется больше, чем ограничение скорости по мощности, т.е. плавность хода часто превышает значимость мощности. Поэтому повышение мощности, скорости и производительности ограничено жесткостью подвески.
Тягово-скоростные свойства транспортного модуля ограничиваются колебаниями рамы и груза, т.е. дорожными условиями. В поле эти возможности не теряют актуальности, так как компенсировать жесткость подвески деформацией шины и почвы, т.е. потерями ресурса, энергии и урожая не выгодно, а на полях после полива трудно. Эти ограничения скорости и производительности указывают на необходимость повышения плавности хода энергетических, тяговых и транспортных модулей совершенствованием подвески, регулированием жесткости подвески по нагрузке с учетом закономерностей согласования, совмещения и обратимости функций и сил тяжести, тяги и торможения, а также использования гравитационных сил в качестве средств управления тормозами и накопления энергии. В этом случае снимается проблема шин низкого давления, а возможности качения колеса по дну борозды, снижения потерь энергии в шине, уплотнения почвы и тягово-сцепных функций колес в поле до нуля путем использования мощности для привода рабочих органов-источников движущей силы при обработке почвы. Это снимает ограничения тяговых, транспортных и приводных функций, а также универсальности энергетического модуля.
Такой взгляд на расширение функций охватывает проблемы качества и надежности выполнения функций в различных условиях, оценки машин и технологий.
Влажность почвы повышает всхожесть семян, облегчает обработку, но усиливает ее уплотнение колесами и снижает КПД.
Твердость снижает буксование и всхожесть семян, а крупные комки требуют многократной обработки почвы и повышения энергозатрат, т.е. снижают КПД. Эти ограничения КПД нужно снять с учетом агротехнических требований.
Оптимальные сроки обработки почвы согласовать с тяговой характеристикой трудно. Традиционные тяговые характеристики трактора не соответствуют требованиям механизатора.
Метод энергооценки решает много проблем регулирования скорости, нагрузки, режимов работы, управления технологической машиной, тормозами стабилизатором нагрузки, двигателем и т.д. При этом информацию можно использовать для управления, оценки, исследования и в качестве средства повышения плавности хода, эластичности привода снижения нагружаемости двигателя, трансмиссии и ходовой части и т.д. с возвратом энергии.
Визуализация энергопотока облегчает решение проблем: оценки энергоемкости, алгоритмизации, моделирования, анализа и синтеза параметров, оптимизации процессов, функций и параметров движителей, рабочих органов, средств управления, ширины захвата и скорости движения агрегатов, режима работы; исследования динамики мобильных энергетических средств, механики машин, КПД, принципов адаптации рабочих органов и структуры управляющей системы к внешним условиям.
В этом аспекте анализ работы ходовой части представляет интерес для поиска путей ее совершенствования, расширения тягового класса, грузоподъемности, улучшения плавности хода и эластичности привода с учетом нагрузки, ее изменения, совмещения и согласования функций, разработки метода оперативной оценки, повышения надежности и точности кинематики применительно к условиям местности и требованиям автоматизации. Ходовая часть должна служить мягкой опорой и эффективным средством передвижения агрегата в нужном направлении при минимальном числе опор и преобразований энергии при утилизации избыточной движущей силы и колебаний рамы с учетом соотношений потерь энергии на деформацию шин и подвесок; ограничений скоростей и требований к перевозке грузов в различных условиях. Обобщающая теория затрагивает много проблем и связей между ними.
Вариантов применения можно привести много. В каждом случае применения предложенного принципа на первом этапе решения проблем по одному знанию компонуются из независимых алгоритмов автономных систем, а при комплексном решении проблем алгоритмы можно согласовать на основе первичных правил совмещения и согласования функций, а также возможных вариантов реализации и применения в науке, технике и образовании.
Расход топлива, сопротивление ветра, мощность, центробежная сила, кинетическая энергия, ошибки управления, тяжесть последствий, опасность и напряженность работы человека, запаздывание и ошибка получения сигнала или исполнения команды, затраты мощности даже на уничтожение кинетической энергии при торможении пропорционально скорости движения снижаются регулированием и распределением энергии между колесами с учетом курса и реакций; преобразованием массы в силу управления; совмещением функций машин и их компонентов с возможностью содействия выполнению алгоритмов действия; изменением функций рабочих органов.
Число звеньев, грузоподъемность, опасность, давление воздуха в шинах, адаптивность к видам грузов и дорог с учетом потребностей человека, универсальность, значимость и перспективность повышают преобразованием продольного и поперечного ходов рулем и рабочими органами ручного и автоматического вождения, блокирования, отключения, остановки, подачи аварийного сигнала в зависимости от ситуации (угона, эвакуации, болезни и т.д.).
Гармонизация интеллектуального, физического, контрольного, творческого, эргономического, дневного, ночного труда и отдыха, структуры усилителей и сигнализаторов, средств остановки и защиты; цепей управления, контроля, координации работы служб обслуживания, ремонта, транспорта, заправки, скорой технологической и технической помощи, производственной и консультационной действий; подготовки кадров, использования учебного труда, воспитания трудовых и творческих качеств и условий реальной работы.
Адаптивно саморегулирующие средства совмещают научные, полевые, стендовые испытания с реальной работой и устраняют: сложнейшее оборудование для оценки эксплуатационных режимов, динамической нагруженности, надежности комплексов, стендов, многочисленных организаций с персоналом задержки или противодействия интеграции науки, производства, общества (целей производителей и пользователей машин).
Саморегулируемость технологических, динамических, управляющих, кинематических, защитных, преобразующих функций многократно повышает "интеллект" машины, допускает ограничения функций человека, исправления ошибок введением программ "угон", "эвакуация", "скорость", "авария", "террор" по спецсигналу.
Энергию между потребителями распределяют с учетом саморегулируемости технологических, динамических и управляющих функций машины, реакций, курса, рельефа и ограничений действий человека в тяговом и тормозном режимах. Это является техническим законом безопасной работы и интеллектуального роста человека и машины вместе. Здесь простейшая защита контуром безопасности, упором достаточно для работы в поле. Адаптивное шагание с учетом высоты препятствий повышает проходимость. Сигнал об изменении сопротивления получают и используют для регулирования технологических, и/или динамических, и/или управляющих функций машины или рабочих органов при реальной работе, и/или массу используют в качестве технологического фактора или управляющего действия в сторону повышения безопасности с возможностью испытания и оценки эксплуатационных режимов без сложных исследований, испытаний и стендов. Энергию между движителями распределяют с учетом: рельефа поля, колеи, радиуса поворота, сцепления, близости к центру поворота, минимизации нагрузки колес и их числа, циркуляции "паразитной" мощности в трансмиссии, циркуляции силы по ширине и числу колес на оси; сигнала об отклонении от базовой линии; очередности включения и отключения рабочих органов, технологического процесса; необходимости смещения вектора движущих сил вперед, тормозных сил назад относительно центра тяжести или сопротивления; преобразования продольного и поперечного ходов, "активности рук", кратности повторения операций, преобразуемости рабочего хода в торможение, или в подачу вперед, техпроцесса в подъем при перегрузке и встрече с камнем, возможностей преобразования сопротивлений в сцепную и/или движущую силу; преобразования массы в технологический, динамический и кибернетический фактор.
Снижая затраты мощности до 6 раз на обработку почвы реверсивными рабочими органами, преобразуют ущерб в пользу. Почву обрабатывают в двух направлениях, снижают число проходов в два раза при междурядной обработке пропашных культур. Зимовспашкой холодоспелой почвы аккумулируют влагу, снижают смыв почвы, потребность в поливе, число урожаев в год с учетом биоклиматического потенциала ландшафта. Настройкой и коррекцией повторности обработки земли, курса, нагрузки, числа рук, колесной и цилиндровой формулы, структуры рабочих органов, траектории, ширины захвата, базовых линий, проходимости, крена, крутизны склона, продольных и поперечных ходов, влажности земли.
Аварийное торможение протектора колеса массой машины.
Избавиться от ущерба: типажа тракторов и систем громоздких тормозных машин, разобщения целей производителей и пользователей техники, потерь энергии легче преобразованием ущерба в пользу, саморегулированием технологических, динамических и управляющих функций, совмещением их и очувствлением техники, обеспечением превосходства мирового уровня машин и технологий по энерго-, металло-, время-, ресурсо-, человеко-, водо-, воздухо-, морозо-, науко-, соломо-, снего-, слухо-, интеллекто-, свето-, тепло-, посево-, структуро-, почво-, экономико-, ландшафто-, биосбережению. Здесь морозо- или холодоспелость почвы экономит много дней (день иногда год кормит), а регулирование теплобиоспелости и использование биоклиматического потенциала многих стран для получения нескольких урожаев в год решает общечеловеческие проблемы. Это и устранение обрастания и обострения проблем, унификация техники стран риросеяния, засушливого и горного земледелия и обработки грунтов касается глобализации и единения целей производителей и пользователей техники и продукции земледелия.
Интеграция функций ходовых систем и рабочих машин превращает тяжелый трактор в многофункциональный привод рабочих органов и в 6 раз снижает расход топлива и загрязнение воздуха.
Снижение в 10 раз скорости движения и повышение ширины захвата полезно для машин/почвы, растений и человека. Снижение скорости, числа колес, буксования, расхода топлива расширением функций рабочих органов повышает биологическую полезность машин, устраняет: ущерб от энергопыленасыщения и уплотнения полей, последствий применения тормозных рабочих органов, опасность технологических, динамических и управляющих функций, громоздких и скоростных тракторов (шок человека, техники и земли) на фиговых чеках и склонах, а также основные причины нефтевойн, бедности, голода, отсталости технологий машиностроения и земледелия от потребностей мирового сообщества.
Тракторы с 2 или 4 ведущими колесами, гидроподъемником, усилителями руля и тормозов, приборами электрооборудования, насосом и вентилятором имеют 8-10 энергопотоков и потребителей лей мощности. При этом увеличение числа колес, стоимости и циркуляции в трансмиссии паразитной мощности (на дорогах), а снижение числа колес повышает буксование, потери ресурса, энергии и урожая. Вывести из такого тупикового состояния легче преобразованием функций энергопотоков и режимов, а также распределением энергии между потребителями с учетом реакций, функций, курса и других условий и законов действия.
Совмещение тормозов, приводов, двигателя, датчика, утилизатора избыточной энергии при торможении, конвертация функций источников и потребителей энергии тракторов, автомобилей и других машин, изменение или замещение функций различных тракторов: общего назначения, пропашных, горных, специализированных для возделивания хлопка, свеклы, риса, винограда, садов и других культур; болотных, лесных, мелиоративных, гидротехнических, погрузочных, промышленных, транспортных, аварийных работ, а также легковысвобождаемого автомобиля с механическим, частично гидравлическим и электрическим отбором энергии и информации для управления руками-носителями сменных рабочих органов или оборудования для выполнения различных операций в нескольких режимах движения и на стационаре представляет величайший интерес для всех стран мирового общества.
Совмещение функций регуляторов скорости и делителей энергии, компонентов трансмиссии, механизмов поворота, торможения и привода рабочих органов способствует металло-, энерго-, ресурсо-, человекосбережению, расширению пределов изменения скоростей, сил (колесной формулы) с учетом технолого-, динамико-кинематических условий автотракторного и другого мобильного машиностроения. Такое замещение функций муфты сцепления, коробки передав, раздаточной коробки, главной и конечной передач, дифференциала, механизмов блокировки, поворота, торможения снижает циркуляцию в трансмиссии паразитной мощности, потери энергии и ресурса, опасность, затраты на производство и применение деталей из проката высокой готовности, отбор мощности с любой стороны. Гидромеханический делитель энергии повышает управляемость курсом, нагрузкой, догружателями и разгружателями колес, облегчает привод рабочих органов, автоматизацию управления.
Преобразование структуры трансмиссии и совмещение функций компонентов трансмиссии прокатно-сотовым трансформатором повышает технологичность, безопасность, экономичность и надежность управления с учетом преобразуемости функций рабочих органов и создает условия для саморегулирования функций энергопотоков.
Преобразование режимов работы приборов электрооборудования также эффективно для контроля, оценки, управления и преобразования динамических, управляющих, информационных потоков. Здесь потенциал информации велик. Преобразования энергии, накопление при торможении нагрузкой генератора, накопление тока, электролиз, подача водорода при разгоне и перегрузке очищает двигатель от нагара.
Замедление, остановка и удержание машины связаны с торможением и уничтожением энергии ресурса, грузов и людей. Утилизация - отбор мощности для обслуживания и разгона или торможение силой инерции легко согласовывают с использованием массы для торможения и удержания без затрат энергии. В каждом случае защита человека и техники зависит от трения и сцепления с опорной поверхностью. Трение и сцепление рамы с опорной поверхностью выше трения колес, тормозов. При совмещении привода тормозов (энергопотоков привода и управления) утилизаторами служат гидравлические, пневматические и электрические системы. Их функции зависят также от сцепления колес с опорной поверхностью. Эта зависимость породила и обострила проблемы управления, блокировки колес, аварийного и автоматического управления и защиты, применения множества типов тормозов и средств управления. Обострение и обрастание проблем торможения и защиты побуждают к поиску пути комплексного решения проблем человеко-, технико-, энерго-, природо-, ресурсосберегащих преобразователей функций и энергопотоков привода, к которым относится масса. Масса как фактор регулирования динамических и кибернетических функций - фактор управления с учетом команды или сигнала, выбора метода настройки, средства управления независима от сцепления.
Силой инерции легче остановить, массой удержать без специальных усилителей. Источники энергии и приводы-преобразователи энергопотоков повышают экономичность, они вместе снижают опасность. Прямое воздействие рамы на опорную поверхность снижает зависимость от приводов, тормозов, ходовой части и человека. Потенциал безопасности такого метода увеличивают, упрощают конструкцию, производство, эксплуатацию и обслуживание.
Совмещение, расширение, адаптивное преобразование, саморегулирование функций, получение силовой информации об отношении сил, сопротивлений, энергий, ускорений, перемещений, напряжений почвы в двух плоскостях, коэффициентов сцепления, сопротивления качению, дорожного сопротивления; эффектов повышения плавности хода, эластичности привода, энергоаккумулирования, утилизации, стабилизации нагрузки, формирования сигнала для испытания в тяговом и тормозном режимах, преобразовании технологических, динамических, кибернетических, эргономических функций без дополнительных усилителей, испытательных элементов создает условия для преобразования машины в полуагроробота применительно к внешним условиям.
Перемещение колеса относительно вертикальной оси, автоматическое регулирование (саморегулирование) чувствительности к изменению курса, направления движения, отклонения от радиуса поворота обеспечивает саморегулирование многих (силы, нагрузки, курса и т.д.) функций.
Очувствление ходовой части, получение и применение информации о реакциях, курсе, нагрузке дает эффект очувствления машины, превращения ее в полуробота. Смещение движущих сил вперед, тормозных назад, повышает безопасность движения.
Совмещение, очувствление и адаптивное регулирование функций трансмиссий, механизмов поворота, торможения и ходовой части упрощают проектирование, оценку, конструкцию, производство, обслуживание, управление и использование мобильных энергосредств в режимах безопасного полуробота. Согласование технологических, динамических и управляющих функций при работе дает эффект саморегулирования.
Комплексному решению проблем: науки, производства автомобилей, тракторов, энергосредств, систем машин для земледелия, использования, развития многих отраслей способствуют следующие преобразования процессов, движений, функций, законов, затрат и потерь в пользу и безопасность:
1. Торможение силами инерции и тяжести, избыточной кинетической энергией без отбора компрессором и накопления в баллонах мощности пневмоприводом, генератором, двигателем в режимах пневмоторможения и утилизации.
2. Замещение монотонной, однообразной, напряженной работы водителя в условиях шума, тряски, запыленности, контролем, чистой координирующей и корректирующей функции оператора полуробота применительно к внешним условиям.
3. Интеллектуальный рост человека и машины, числа функций машины - блокирований ошибок человека в конфликтной или отвлекающей ситуации, при высокой напряженности, чрезмерной ответственности, бездействии или ошибочном действии. Согласно такому варианту управления и режима саморегулирования остановка и разгон включают управление двигателем, муфтой сцепления, коробкой скоростей, тормозами, утилизаторами избыточной силы, накопителями и потребителями ее на подъеме для разгона без разрыва потоков энергии движения и торможения по следящему принципу пропорциональности ходу или силе действия назад при торможении и вперед при движении.
4. Переход от замены и усложнения проблем к многоуровневому их решению, применению технического зрения и сенсоров, копиров базовой линии без накопления ошибок перекопирования, предотвращения от увода и сползания дисками-почворулями.
Рекордное превосходство показателей мирового уровня достигается путем качественного улучшения: технологических, динамических и управляющих функций машины, массы, рабочих органов и привода /в 3-100 раз/; - силовой и опорной проходимости /до 1000 раз/; энерго-, металло-, влаго-, время-, почво-, ресурсосберегаемости /в 6-34 раза/; условий работы в огне, воде и ином опасном поле; гибкости, совместимости функций и операций, преобразуемости технолого-, динамико, эргономико-, эксплуатационных качеств и эффективности использования биоклиматического потенциала ("работы" солнца, земли, влаги, времени, техники, человека); преобразований ущерба сопротивлений, массы, рабочих органов в выгоду человеку, технике и природе; условий роботизации и применения широкозахватных машин малой массы.
Преобразование сопротивления рабочих органов в силы движения и управления, массы - в технологическое и управляющее действия, очувствления компонентов и энергопотоков гарантирует совмещение функций. Это позволяет одной машине со сменными рабочими органами выполнить в режиме робота все работы и спасти мировое сельскохозяйственное машиностроение, земледелие от дорогой, экологически опасной экономически ущербной) системы машин более 200 типов - тормозных машин и тяговых средств (тракторов). При этом человек-оператор полуробота оценивает настройку режимов, контролирует и корректирует качество работы. Это превращает тракториста-водителя (раба техники) в наблюдателя. Ведущие рабочие органы гибкостью функций, прозрачностью затрат, совместимостью испытаний с реальной работой облегчают интеграцию науки, производства, использования техники и подготовки кадров.
Повышение мощности, производительности, технологичности и динамичности машины связано с функциями, числом, ножной или колесной формулой шагания рабочих органов.
Увеличение числа рабочих органов, ног, ширины захвата, например, в 10 раз соответственно снижает длину, скорость, опасность работы и автовождения. Формула шагания рабочих органов отражает число шагающих вместе (активных) и остановленных реакторами (силы и реакции), которые должны быть близки или равны. Если одна нога или все ноги шагают вместе, то движение прерывается, если два и более рабочих органов шагают поочередно, то ширина захвата пропорциональна их числу и при той же мощности скорость снижается.
Формулу шагания рабочих органов нужно корректировать с учетом необходимого равенства сил и реакций малым числом ног и колес. В режиме транспортного движения увеличение числа колес, прицепов, проходимости и динамического фактора регулированием колесной формулой скорости движения многократно расширяют пределы регулирования динамических показателей. Это преобразует взгляд человечества на обработку земли, дороги, перевозки, использование техники, природы и человеческого фактора.
Закон регулирования скорости движения изменением ножной или колесной формулы при надежной реакции ног или колес создает основу унифицированного ряда машин различной мощности, производительности, низкой и высокой скорости для выполнения различных работ в наиболее эффектном режиме привода рабочих органов.
ТЭП Технико-экономические показатели
Металло-, энерго-, влаго-, время-, ресурсосберегающие рабочие органы создали все условия для роботизации технологий возделывания различных культур, многократного увеличения функциональных возможностей ходовой системы, трансмиссии (изменении скорости и радиуса поворота; повышения ширины захвата, производительности, повторности выполнения работы без дополнительных проходов по полю), выбора режимов перемещения рабочих органов /ведущий, тормозной, нейтральный/, управления /ручное, полуробота, робота/ по упреждающему или запаздывающему сигналу, адаптации к внешним условиям, самоочистки и самозащиты рабочих органов машины, повышения безопасности и эколого-экономической эффективности, устранения практической нелогичности КПД тяги, буксования, т.е. создает условия для устранения ущерба и достижения прорыва в сфере новых технологий производствва техники и продукции земледелия, материального и морального спасения мирового сообщества в соответствии с общечеловеческими требованиями.
Применение полуробота гарантирует прорыв в сфере жизнеобеспечения, спасения человечества от бедности, голода и нефтевойн. Повышение в 30-50 раз ширины захвата, сцепления с почвой силы, управляемости, проходимости, снижение количества движения, ущерба, уплотнения почвы, числа машин, затрат, буксования, числа тракторов, сельхозмашин, потерь энергии, влаги, времени, ресурса, числа оригинальных деталей за счет использования проката высокой готовности, оборудования для производства и испытания, получения и применения сигналов для повыщения интеллекта человека и техники гарантирует следующие преобразования показателей:
Система машин → *система рабочих органов. Число машин 100→1. Тракторы-тягачи → энергосредство даже на воздушной подушке. Трансмиссия и механизм поворота → делитель энергии без ущерба. Ходовая часть → рабочие органы → бесколейное движение в поле → регулятор скорости и силы. Ширина захвата 0,3-5→3-30 м. Рабочие органы → источники силы. Уплотнение почвы 1-2→0-0,1. Управляемость и опасность труда 10→1. Сцепление 0,5→5-15. Масса, сила, скорость, производительность, тяговый КПД → эколого-, технолого-, экономический фактор. Длина 5-15→1,5-3 м. Буксование 20%→0. Путь 3-30 км/га → 1. Стоимость С→0,5С. Проходимость, КПД качения, буксования, тяги → энерго-, металло-, влаго-, время-, почво-, ресурсосбережения при обработке всегда. Сила - часть веса /массы/ → часть сопротивления. Равенство скоростей движения агрегата и рабочих органов → различие в 10 раз. Рабочий орган для одной операции → преобразователь функций. Экономия энергии 6 раз, металла - 34 раза, повторении ходов 30. Трактор и более 100 машин → привод и рабочие органы робота. Трение полевых досок → управление движением и ведущая сила. Снижение количества движения 30-50 раз, кинетической энергии - в 100-200 раз. Производительность без ограничения весом, силой, буксованием, влажностью, крутизной склона, человеком. Опасное ограничение динамико-, кинематико-, производственно-экологических качеств → адаптивное улучшение их с учетом курса и условий работы приближением сил и сопротивлений. Ограничение влажности и агросроков → регулирование спелости. Радиус поворота 3-11 м → 0. Поворотные полосы → 0. Повышение мощности, массы и сопутствующего ущерба экономике, ресурсу, почве, обществу → избыток, резерв производительности. Трудность познания множества технологий и машин, обострение проблем энергии и металла → производство и применение одной машины со сменными рабочими органами. *→ «БЫЛО→СТАЛО»
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБЫ ОБРАБОТКИ ПОЧВЫ И УПРАВЛЕНИЯ И МАШИНА ДЛЯ ИХ РЕАЛИЗАЦИИ | 2007 |
|
RU2370007C2 |
| СПОСОБ УПРАВЛЕНИЯ МАШИНОЙ (ВАРИАНТЫ) | 2010 |
|
RU2489581C2 |
| МАШИНА И СПОСОБ ЕЕ ПРИМЕНЕНИЯ | 2011 |
|
RU2474502C2 |
| МАШИНА | 2011 |
|
RU2499720C2 |
| МАШИНА (ВАРИАНТЫ) | 2009 |
|
RU2472951C2 |
| ДВИГАТЕЛЬ САМОХОДНОЙ МАШИНЫ | 2010 |
|
RU2450135C2 |
| СПОСОБ ОБРАБОТКИ ЗЕМЛИ И АГРОМАШИНА | 2003 |
|
RU2265298C2 |
| АГРОМАШИНА | 2004 |
|
RU2342821C2 |
| СПОСОБ ОЦЕНКИ ПАРАМЕТРОВ СЕЛЬХОЗМАШИНЫ | 1989 |
|
RU2023359C1 |
| СПОСОБ ОБРАБОТКИ ЗЕМЛИ И МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2222129C2 |
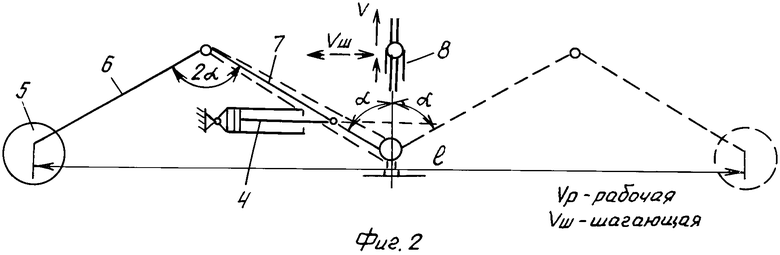
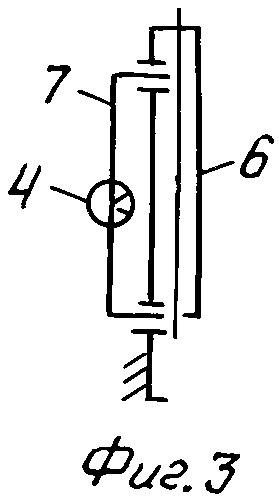
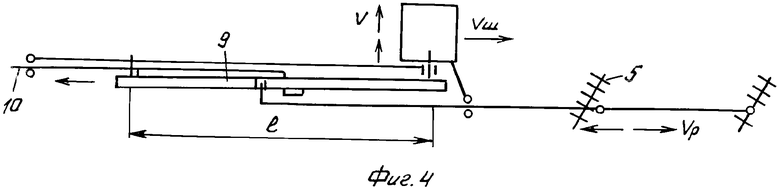
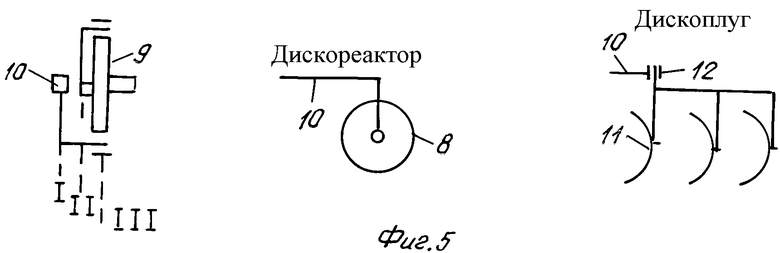
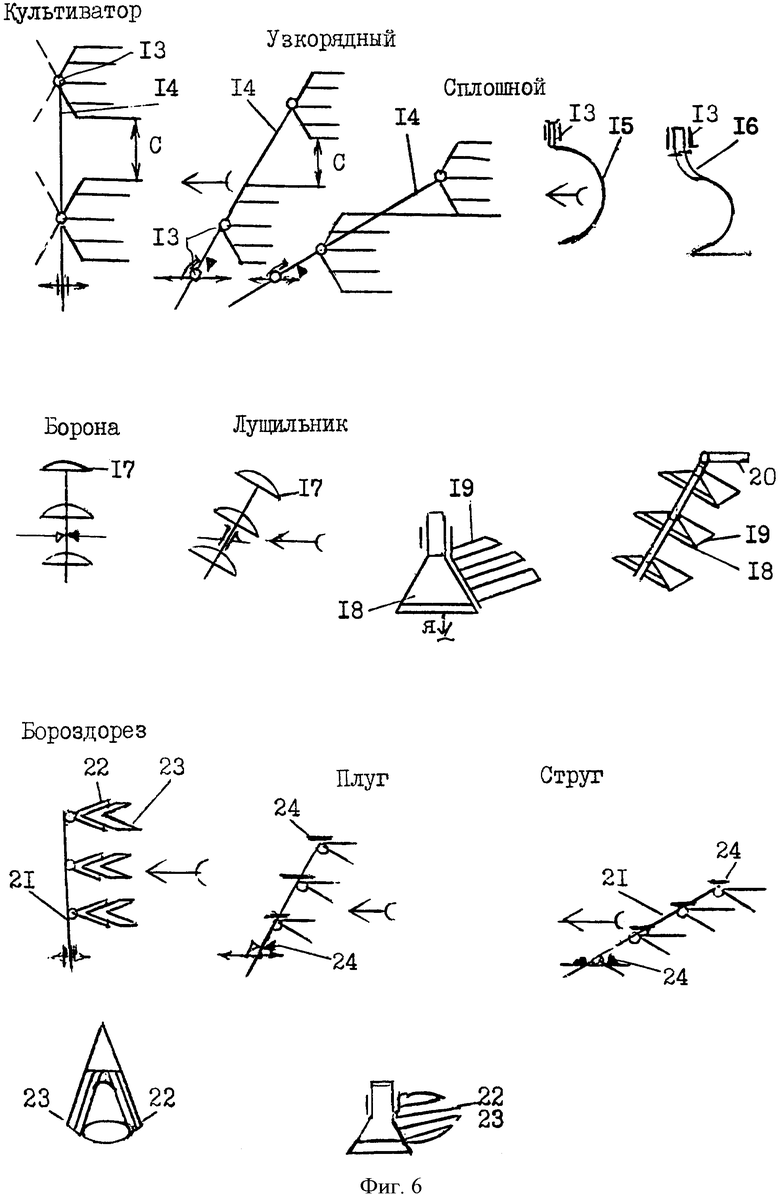
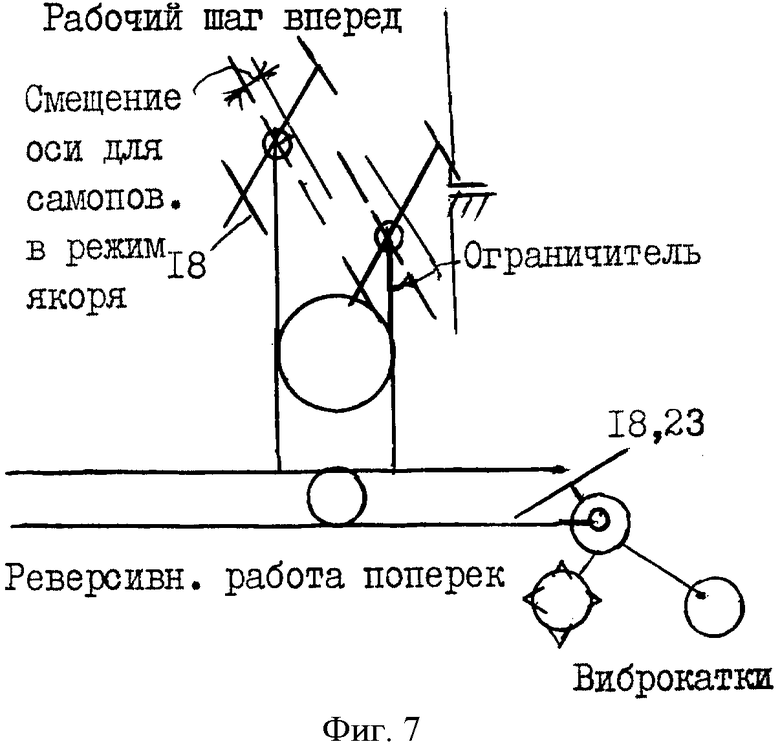
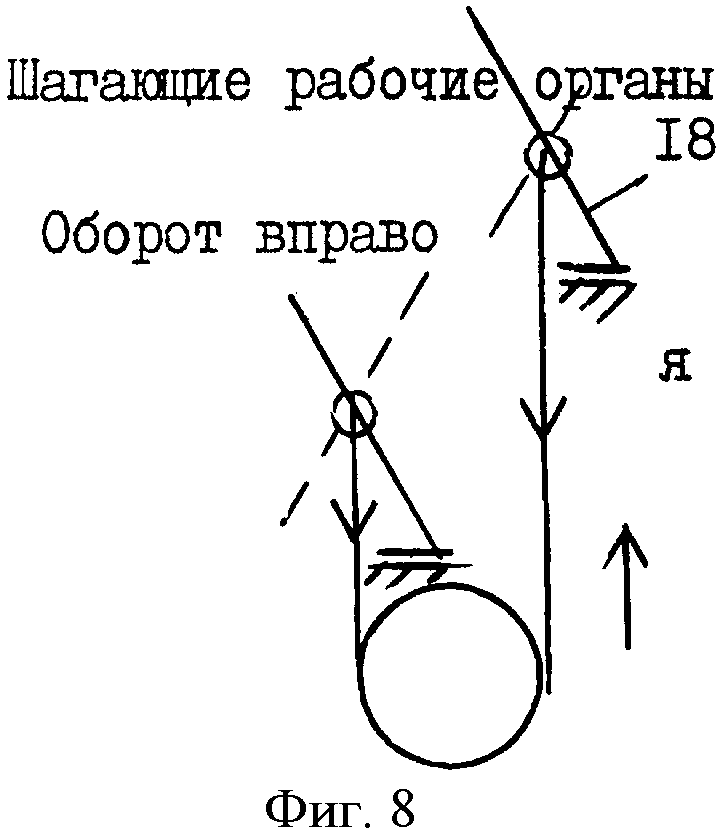
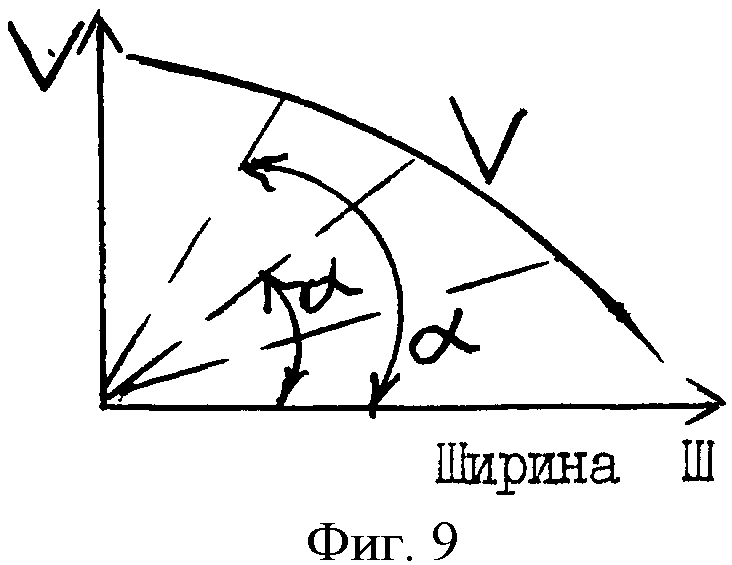
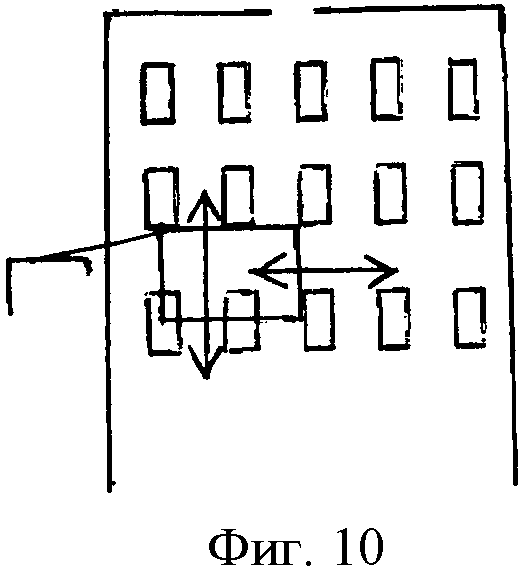
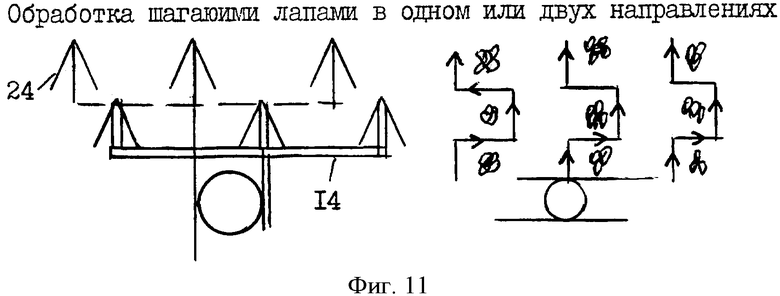
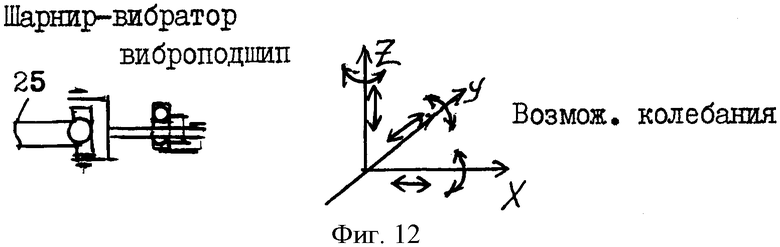
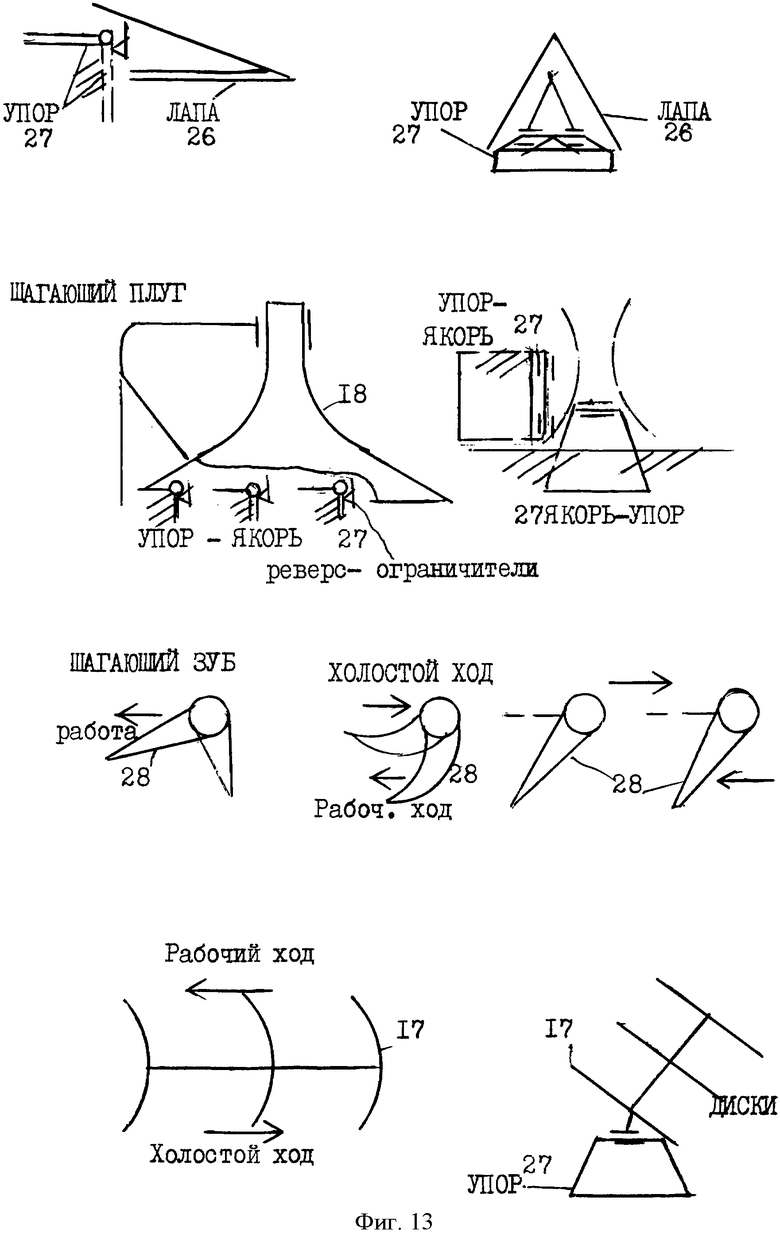
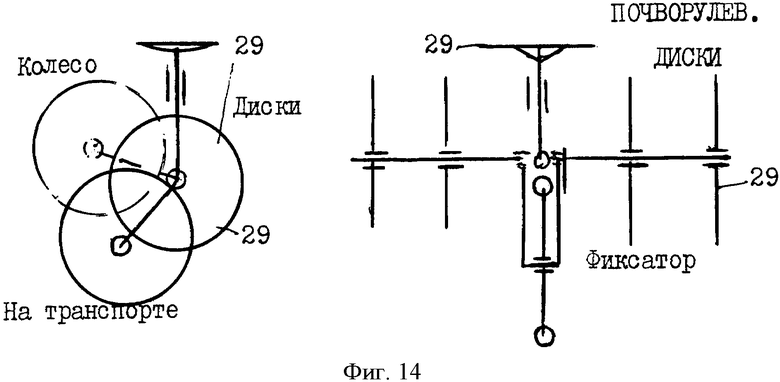
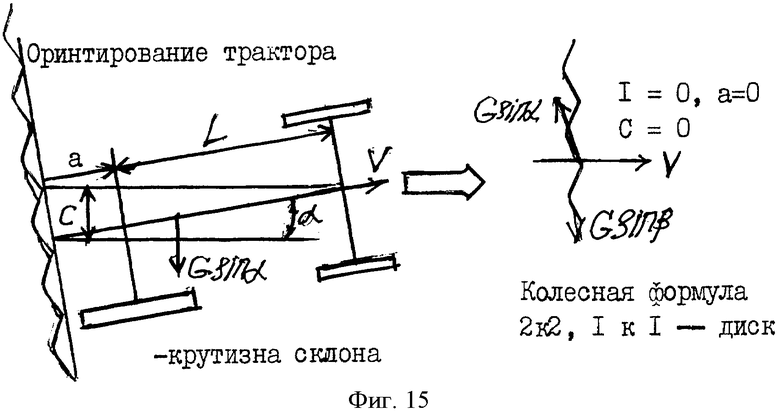
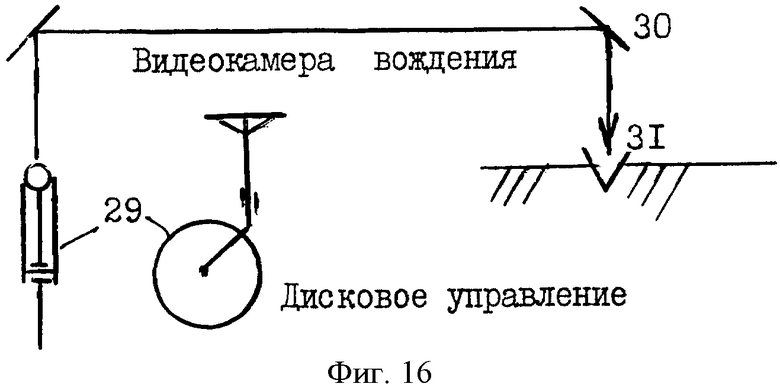
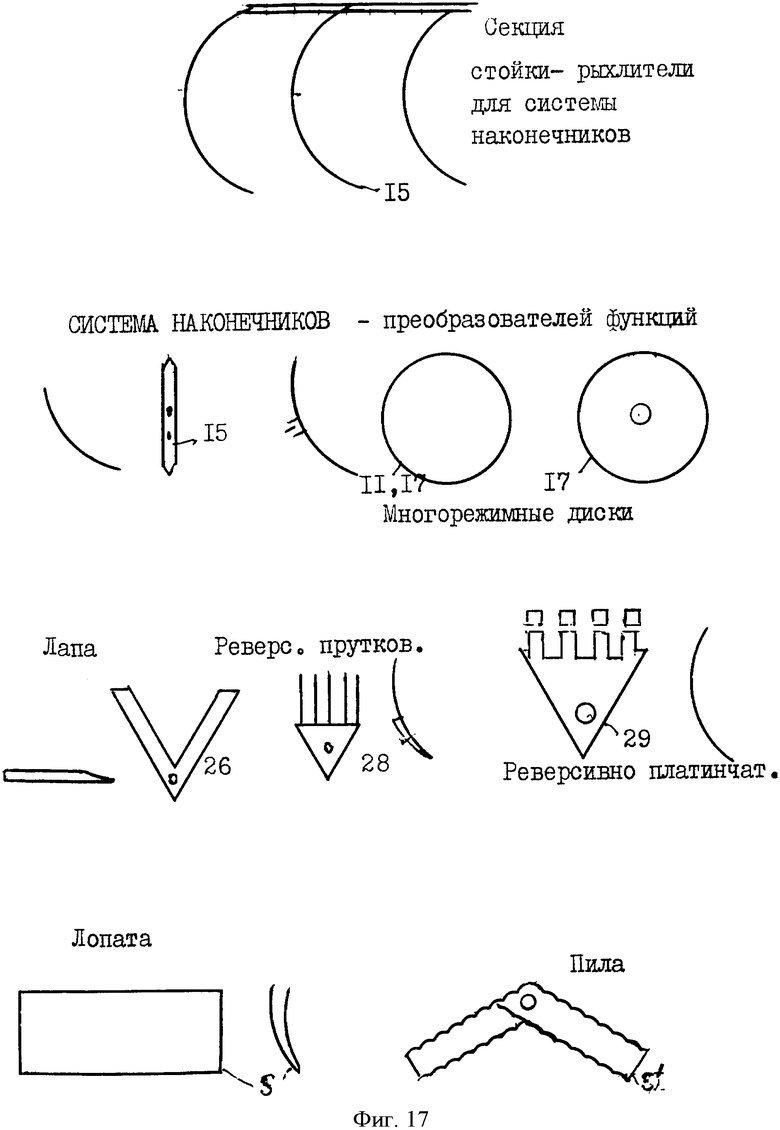
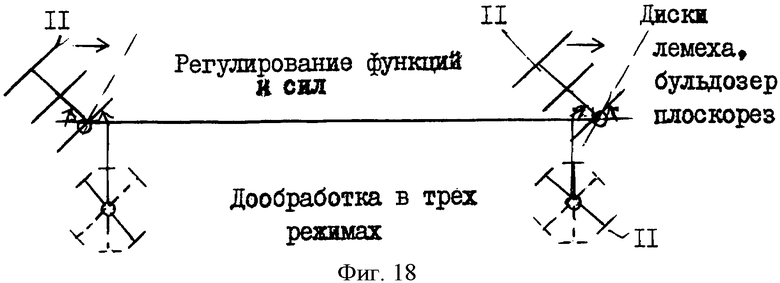
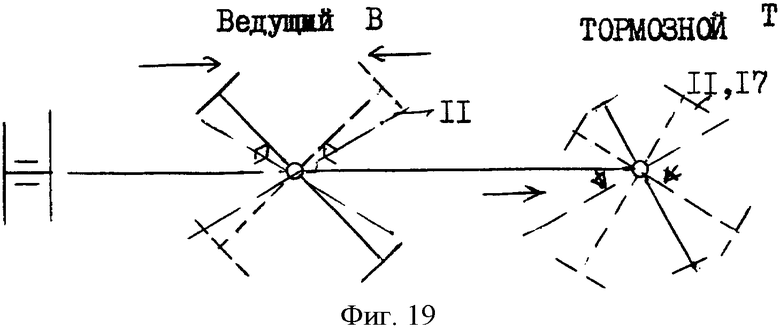
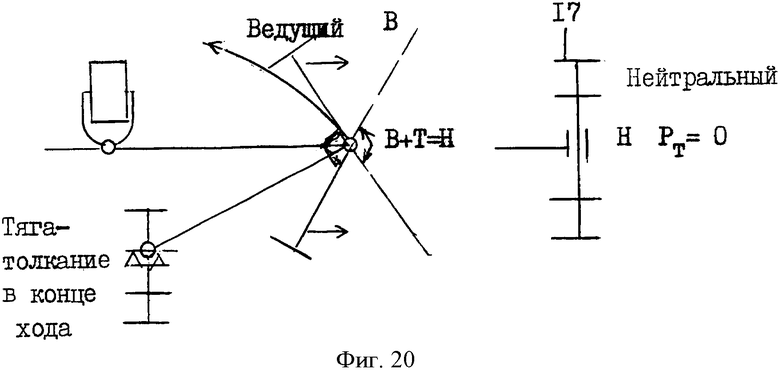
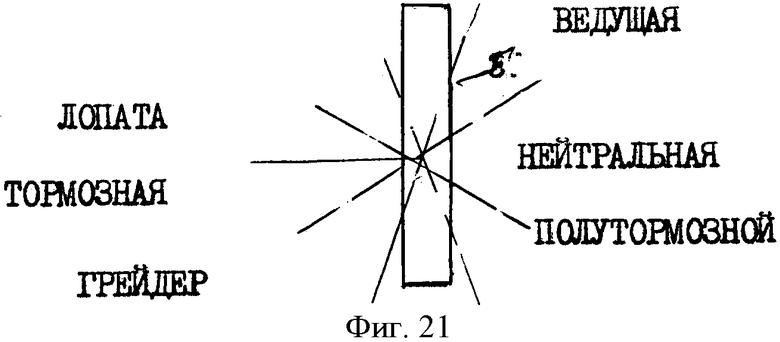
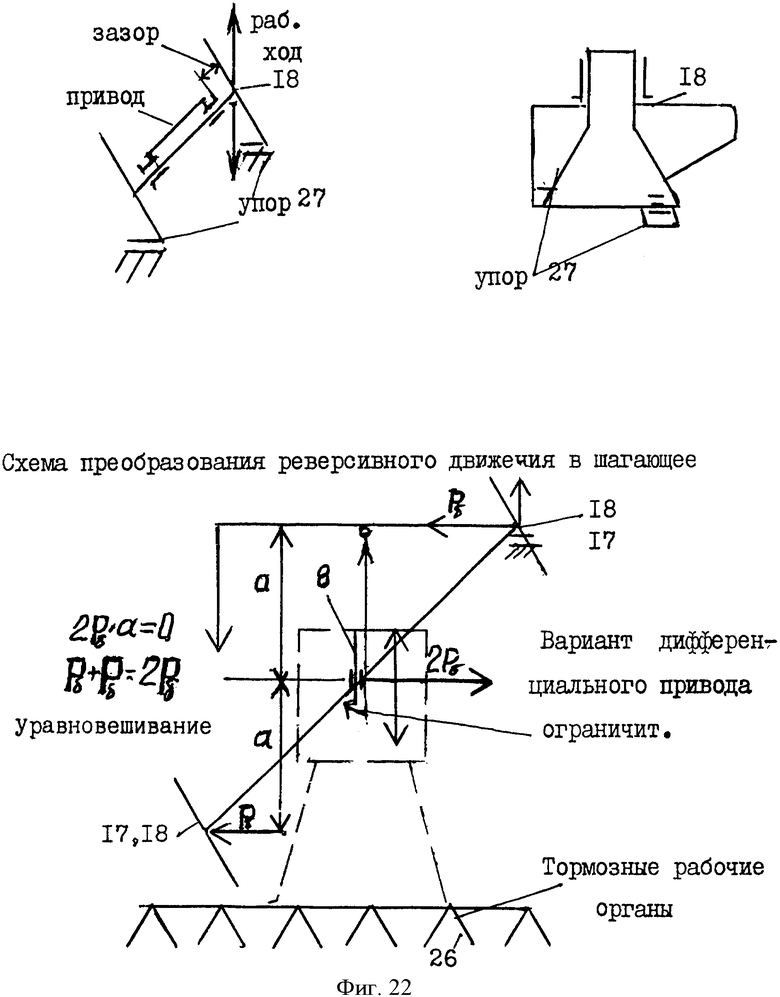
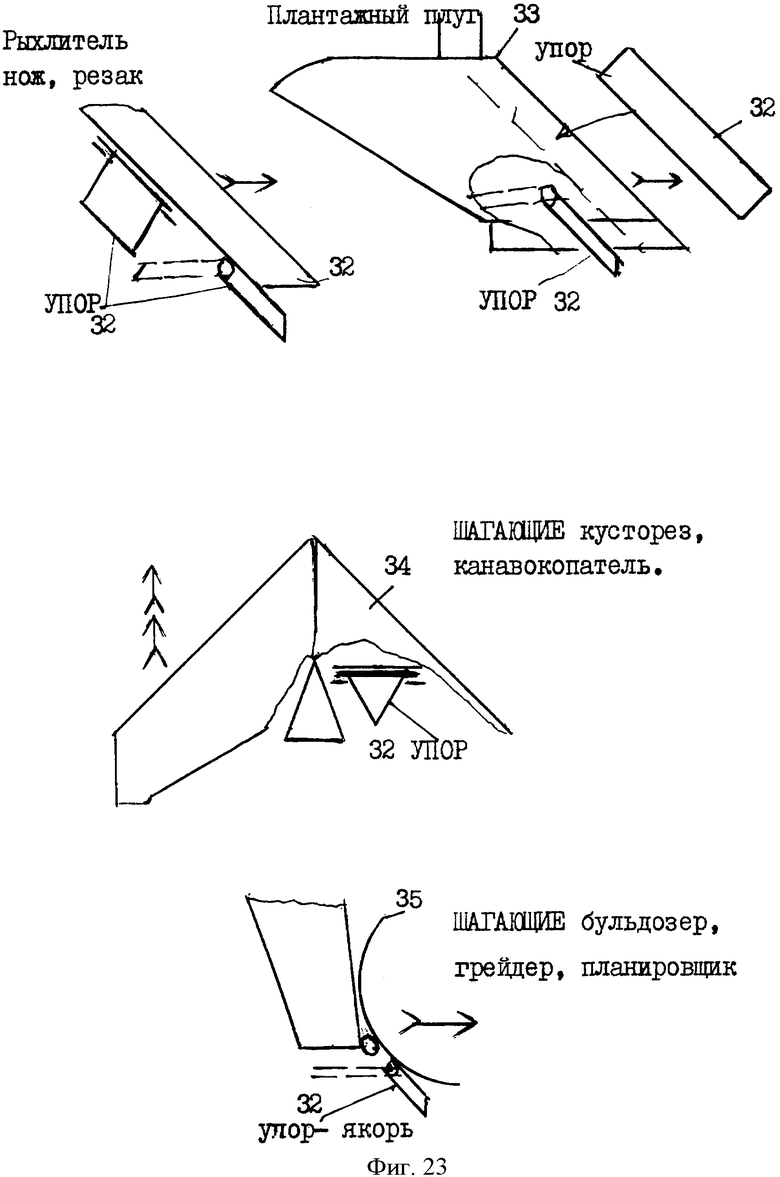
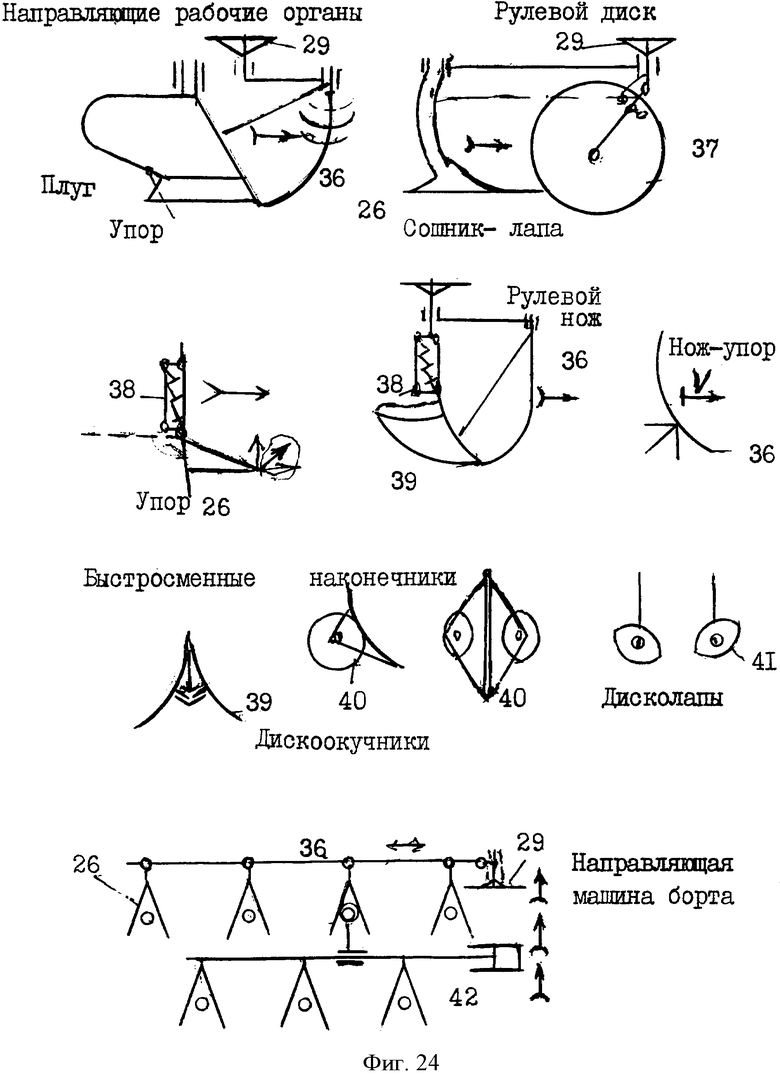
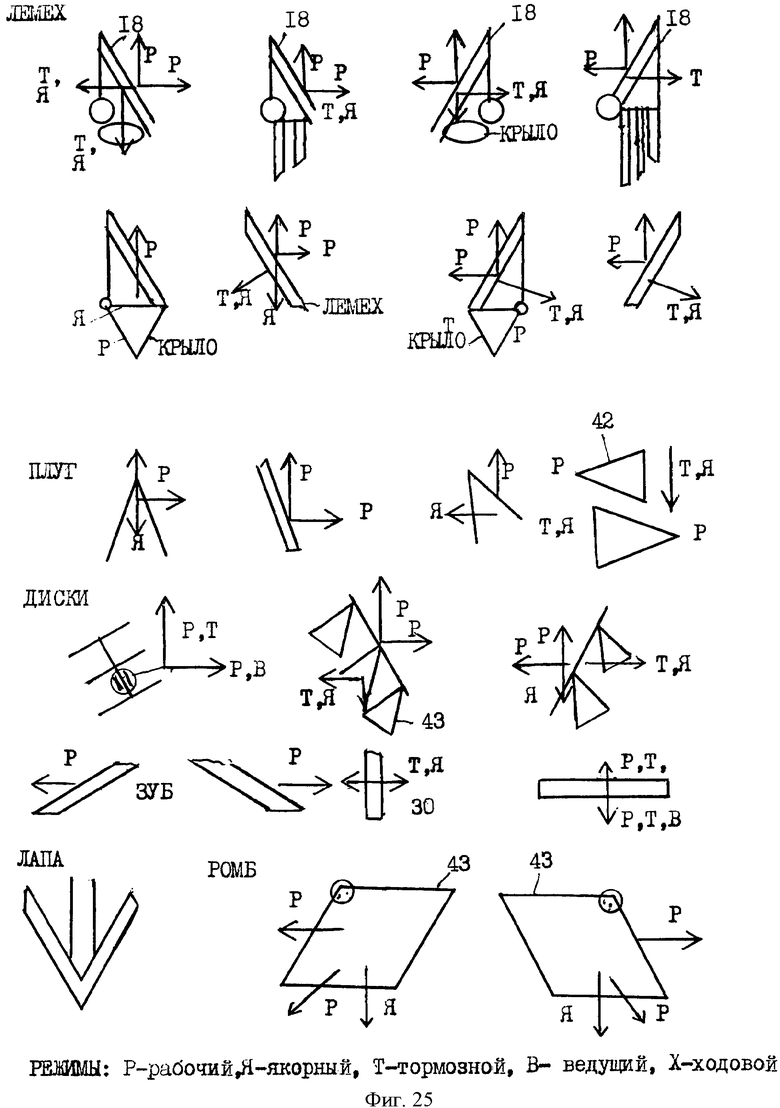
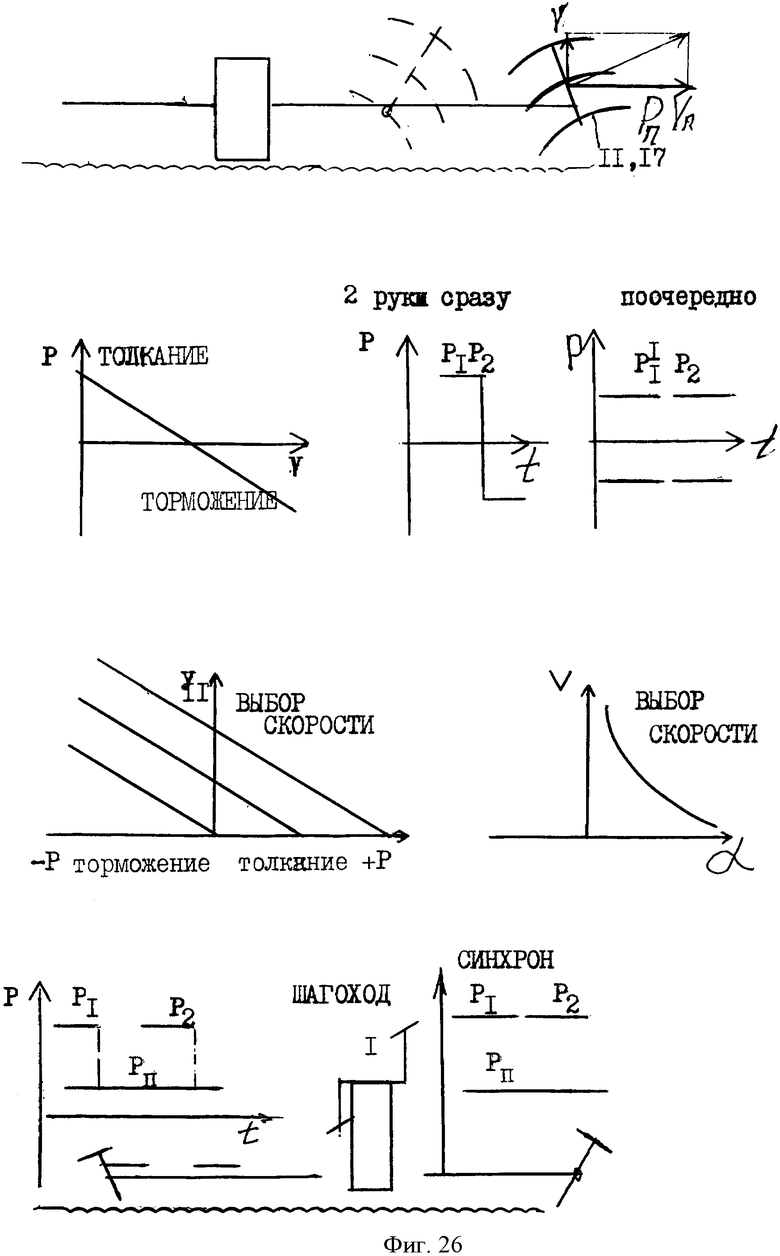
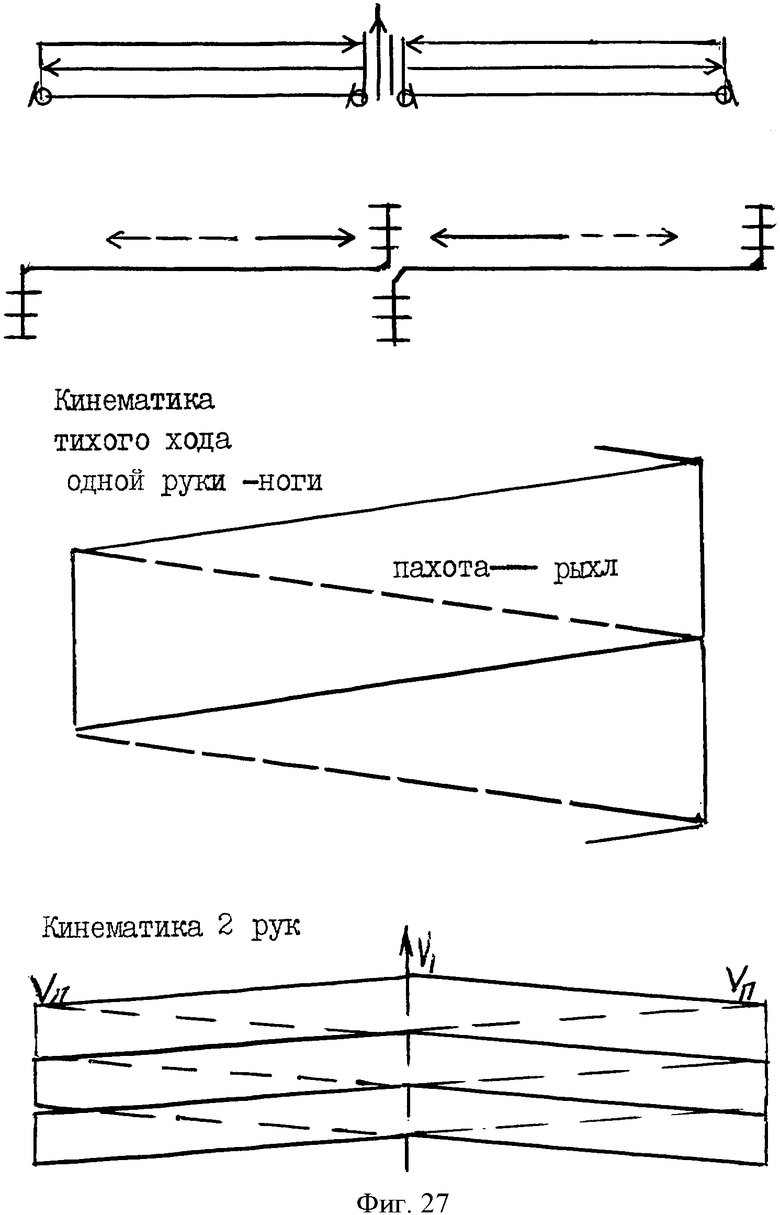
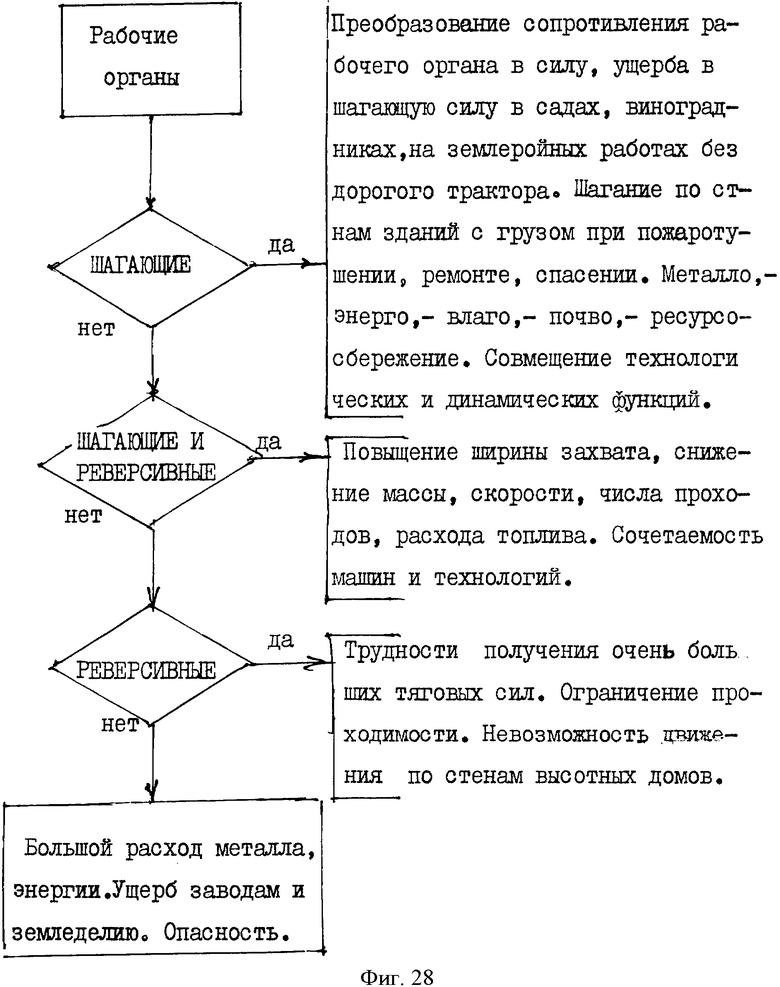
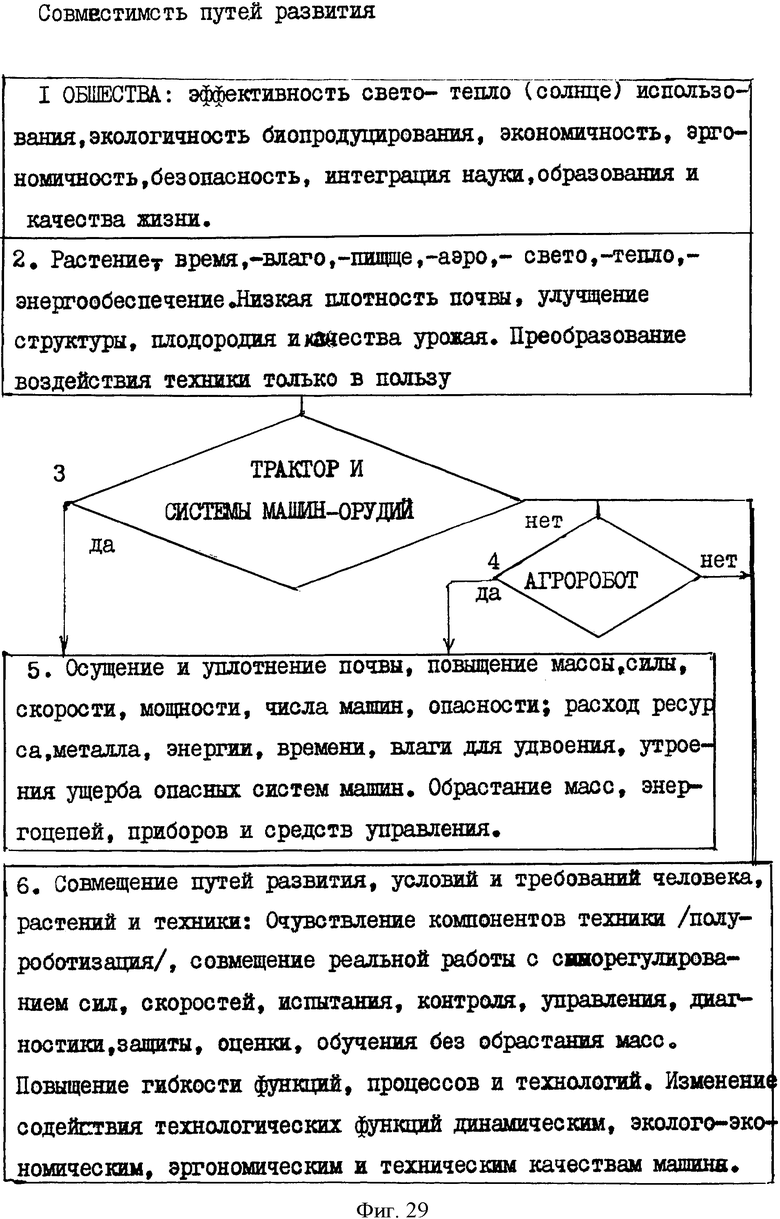
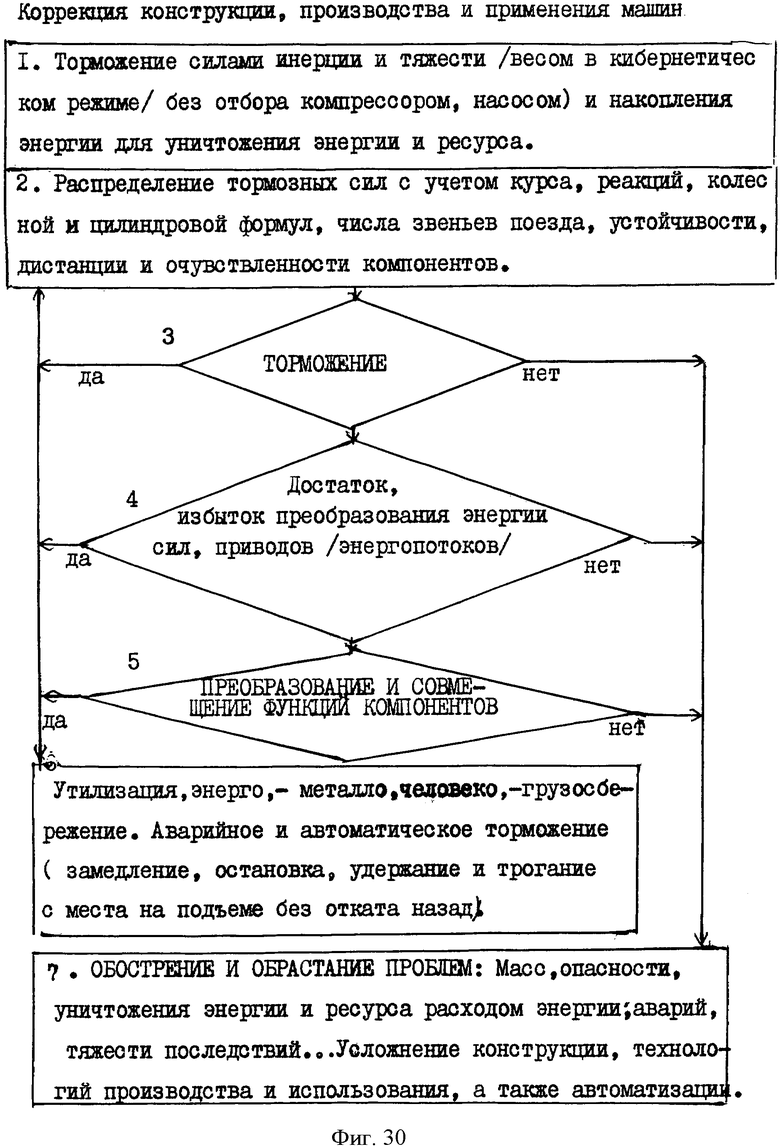
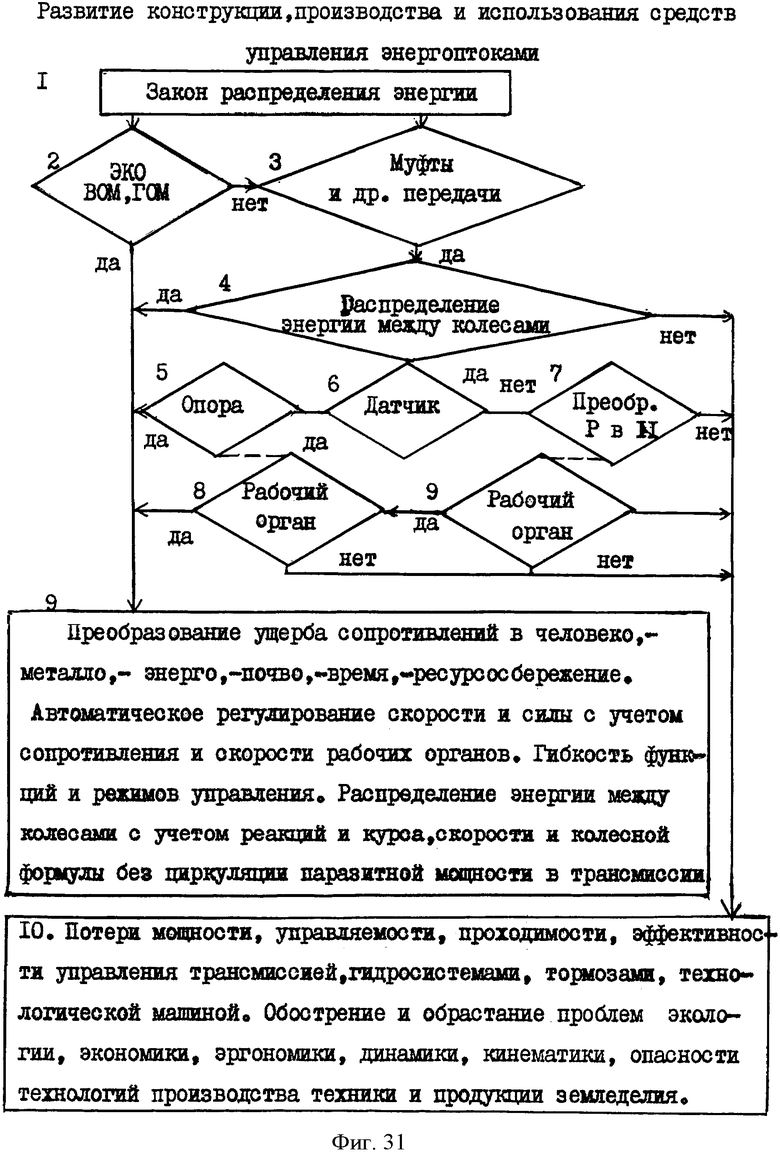
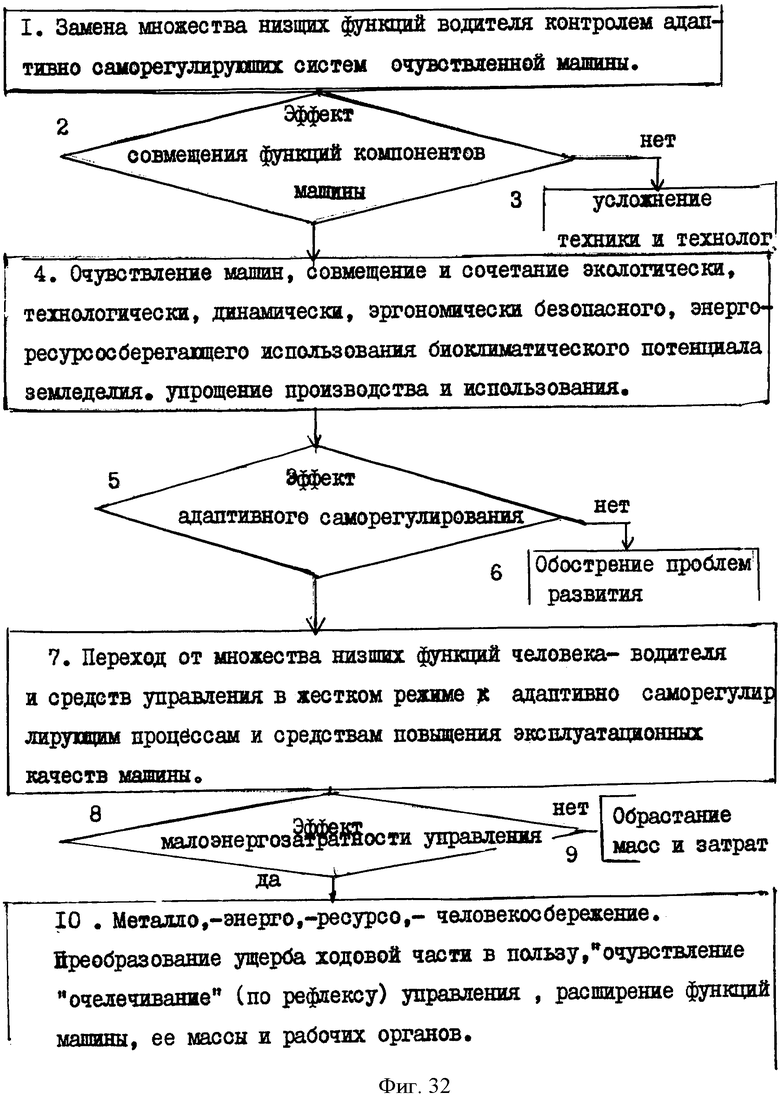
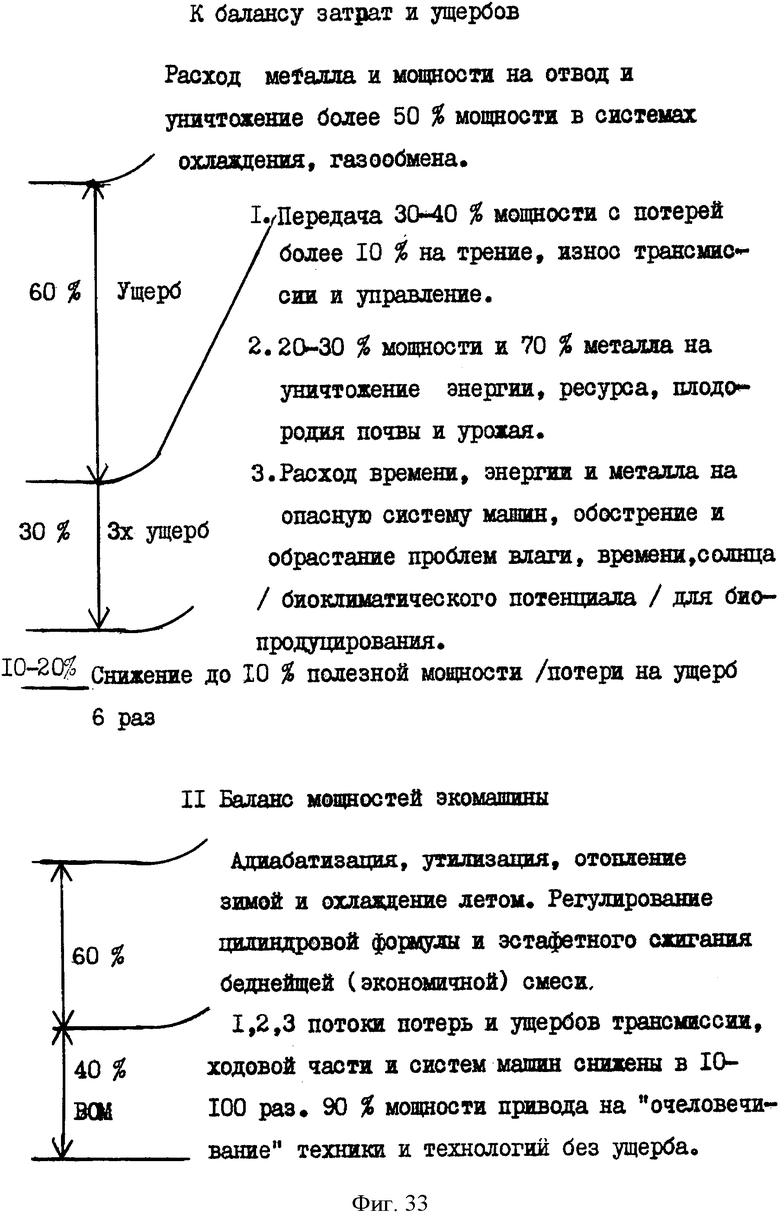
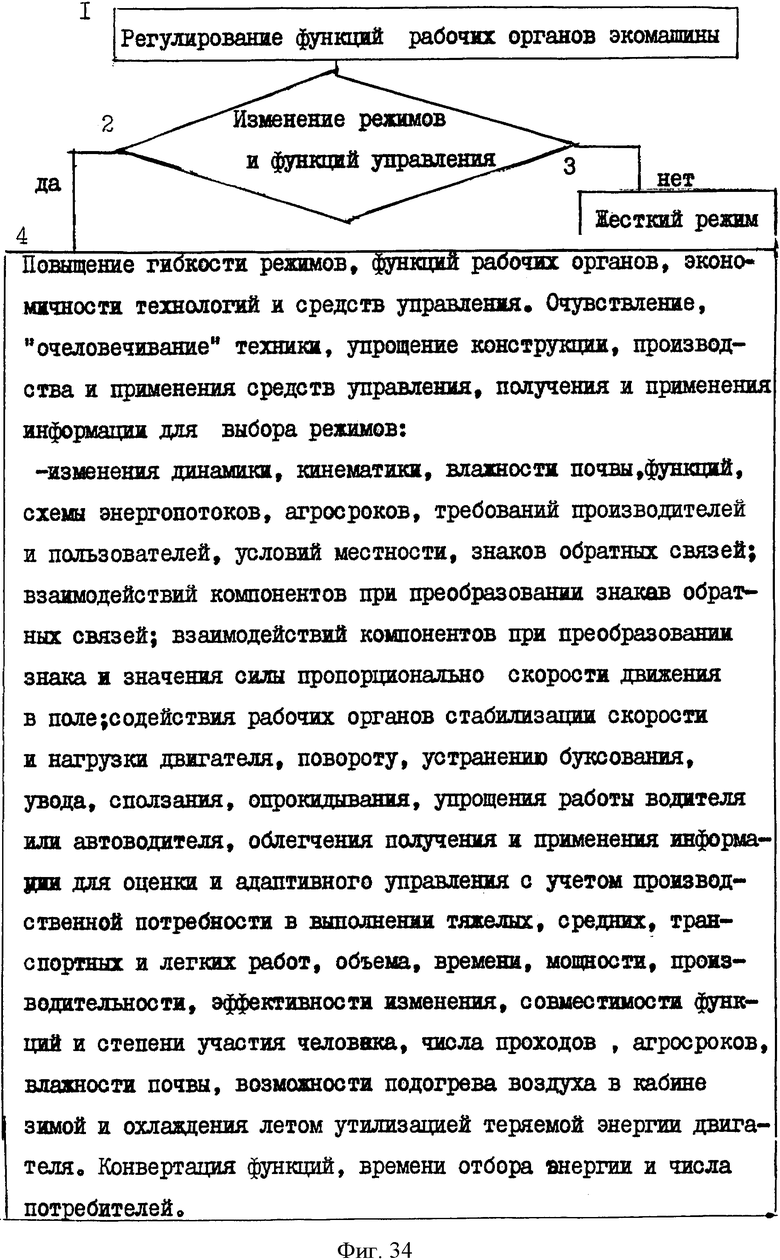
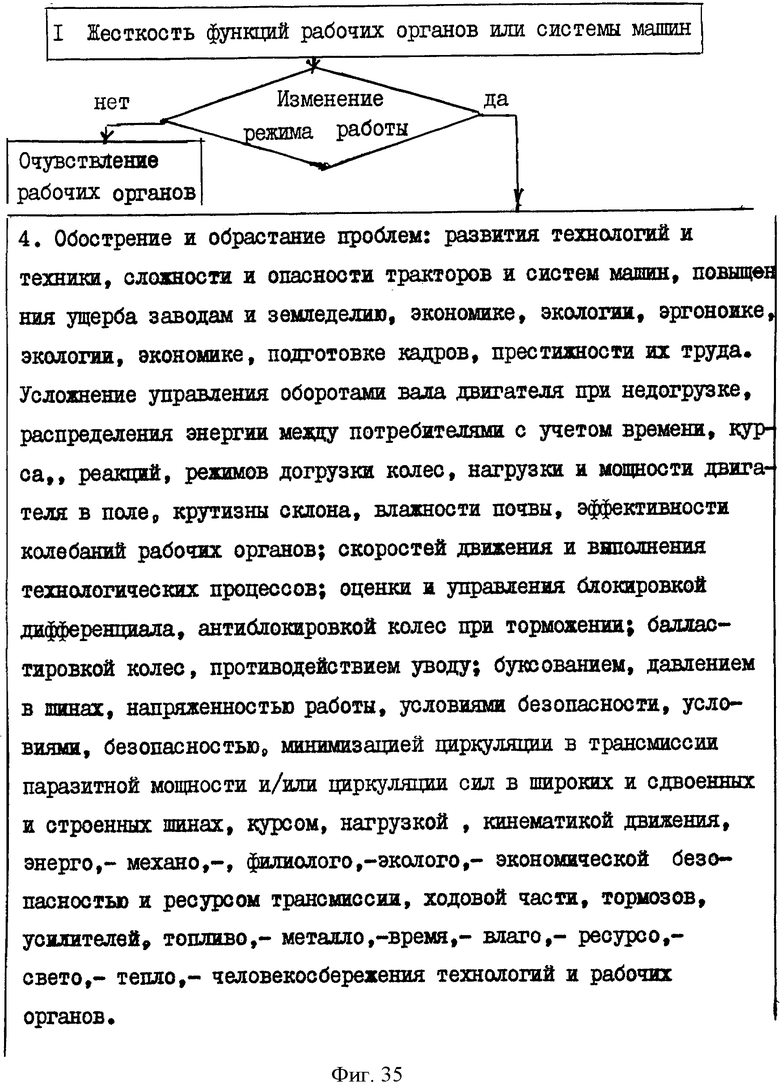
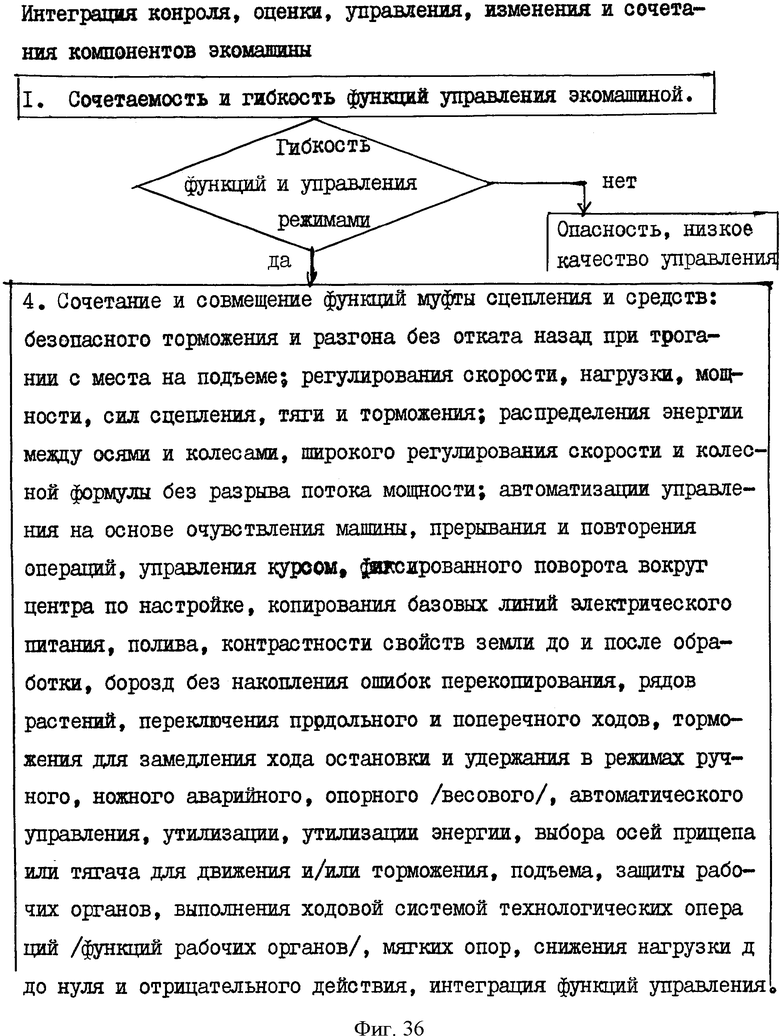
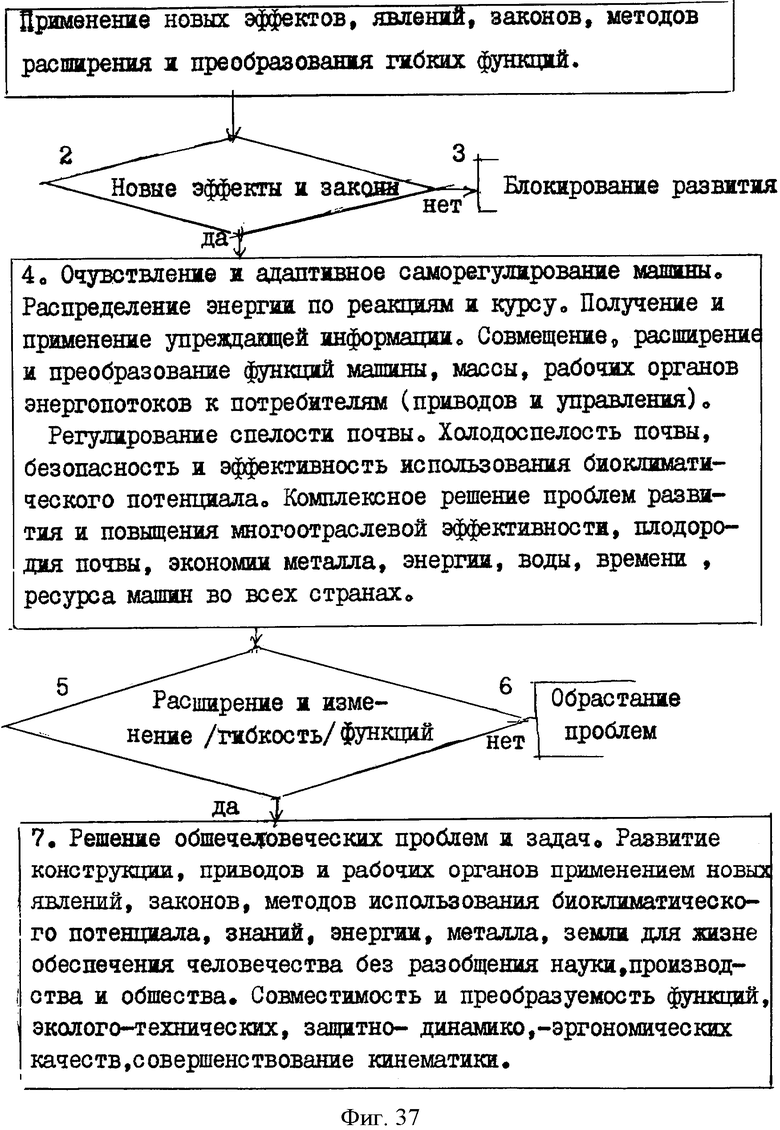
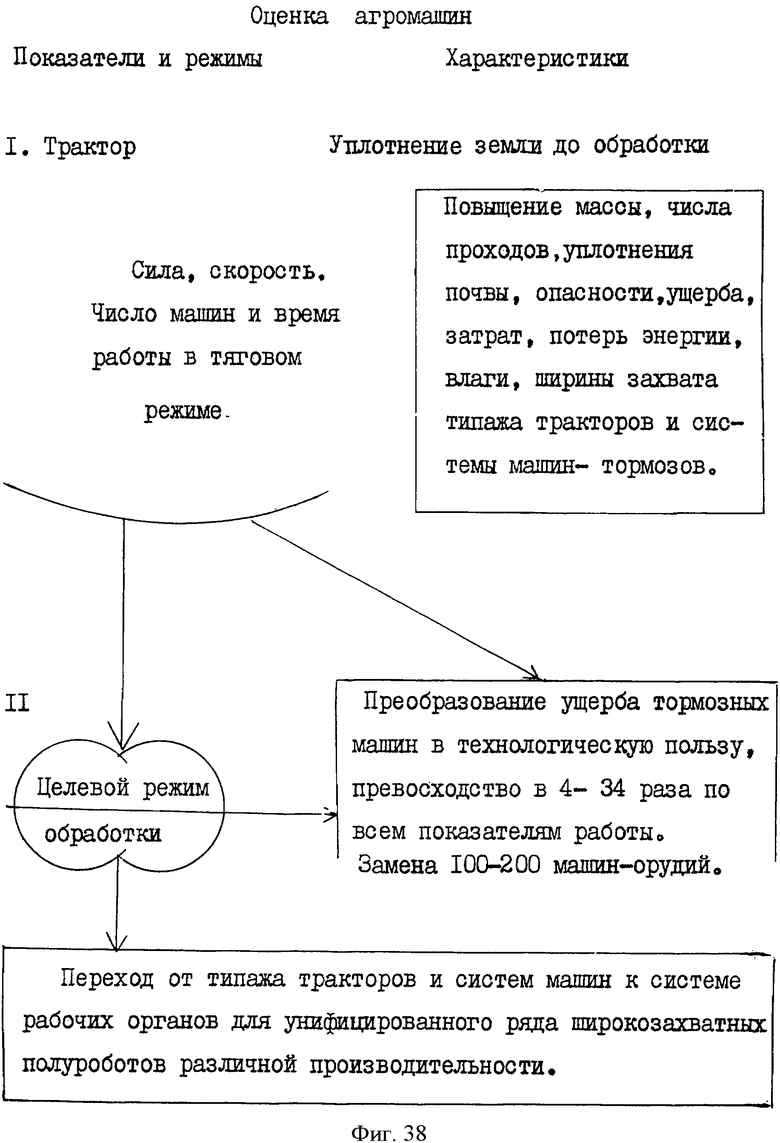
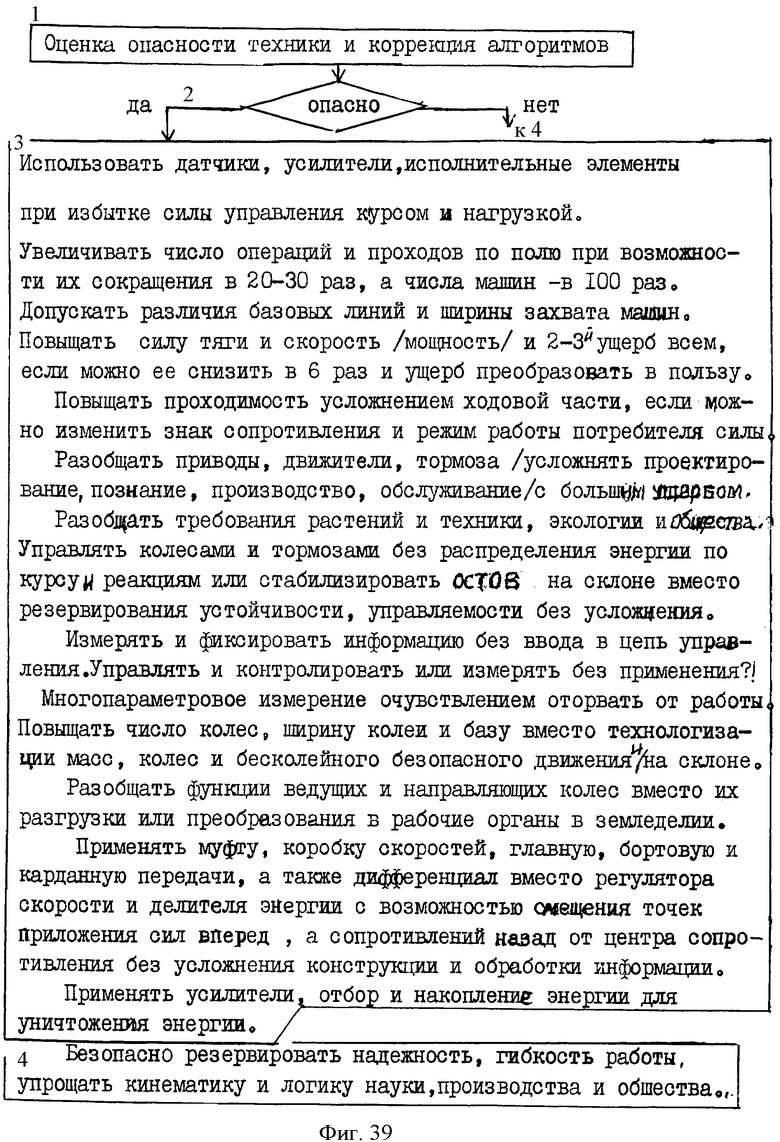
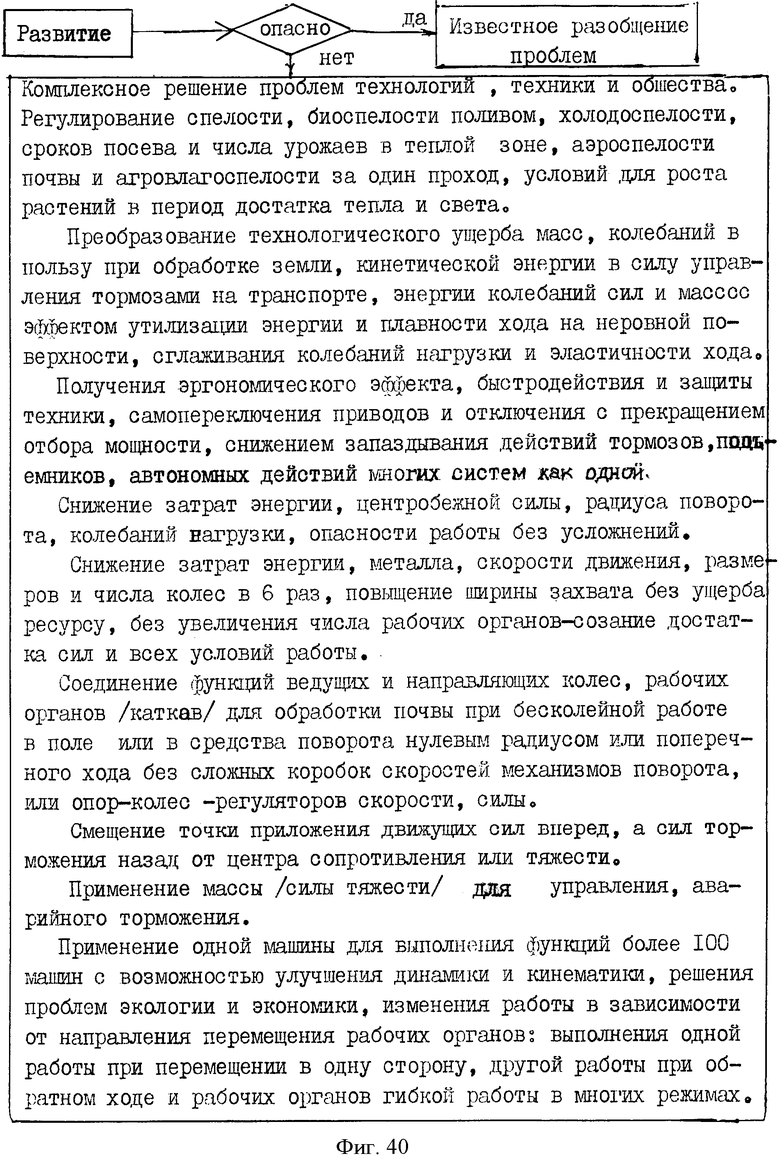
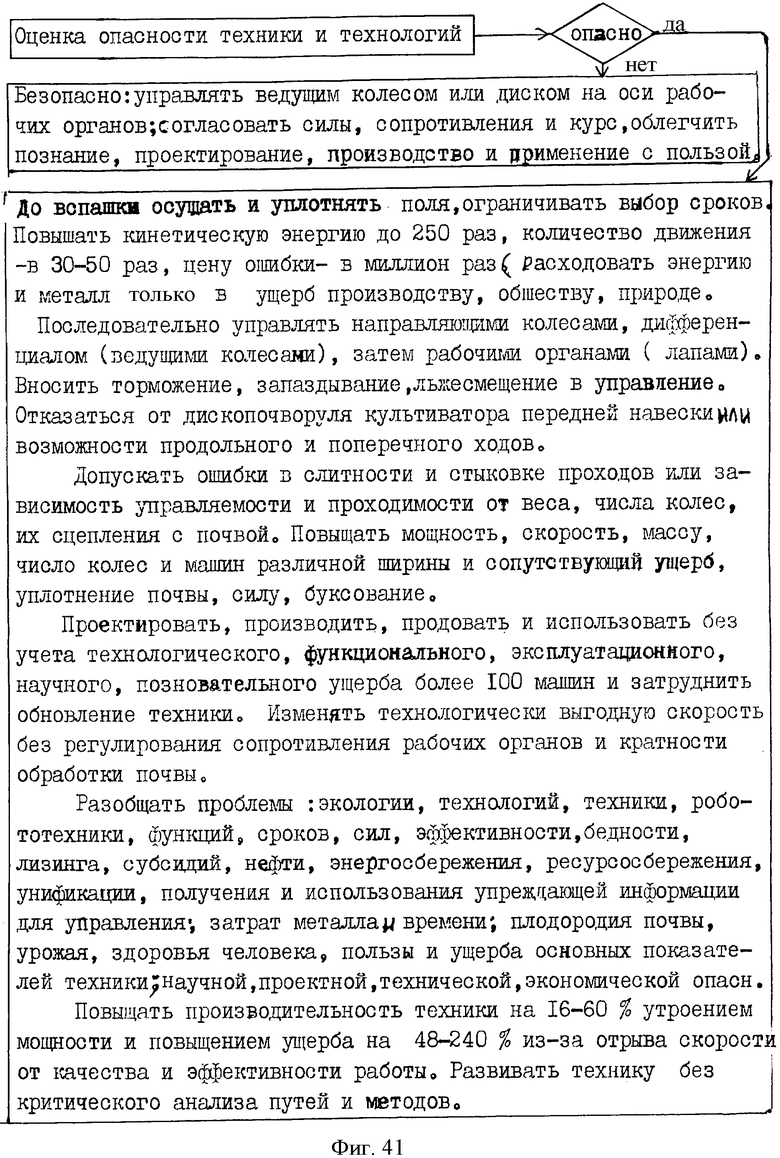
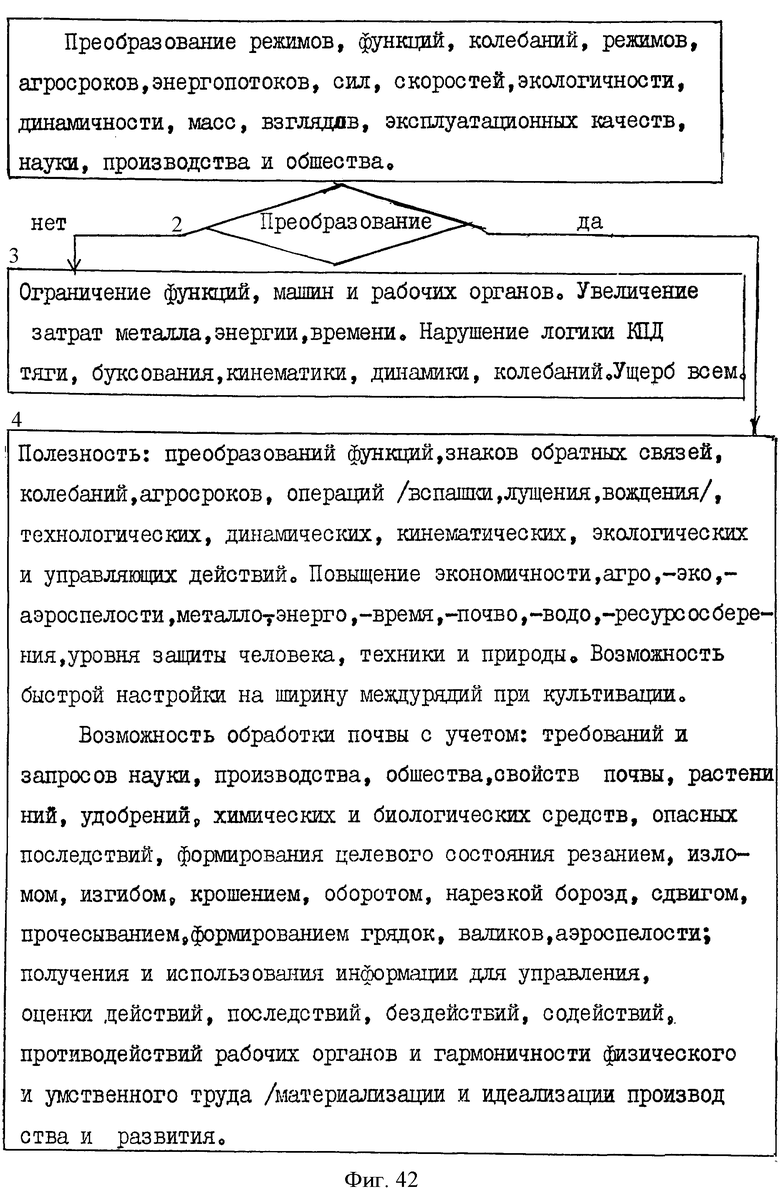
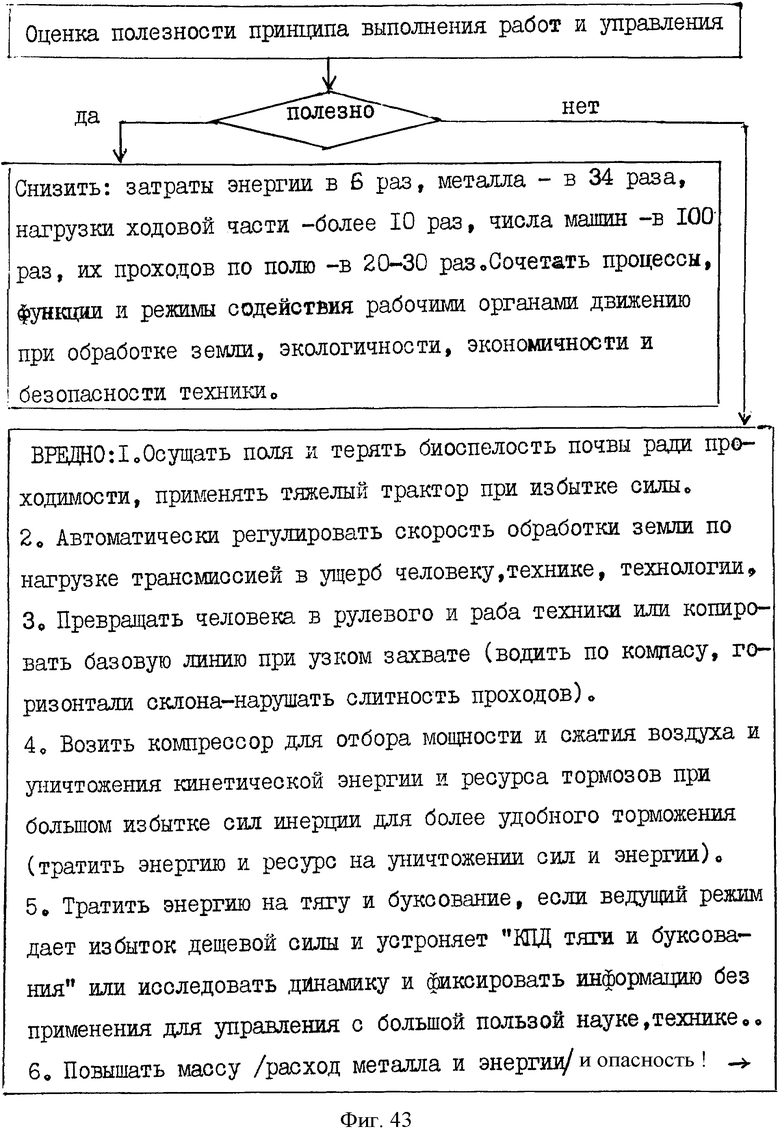
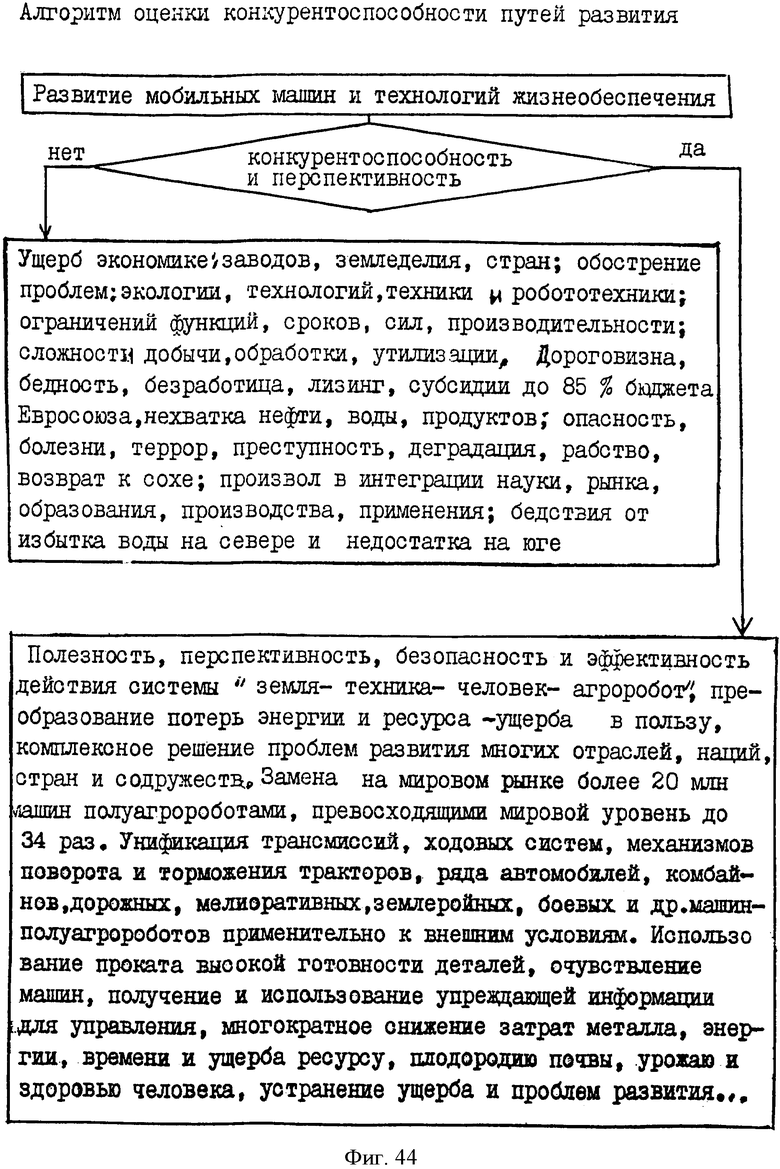
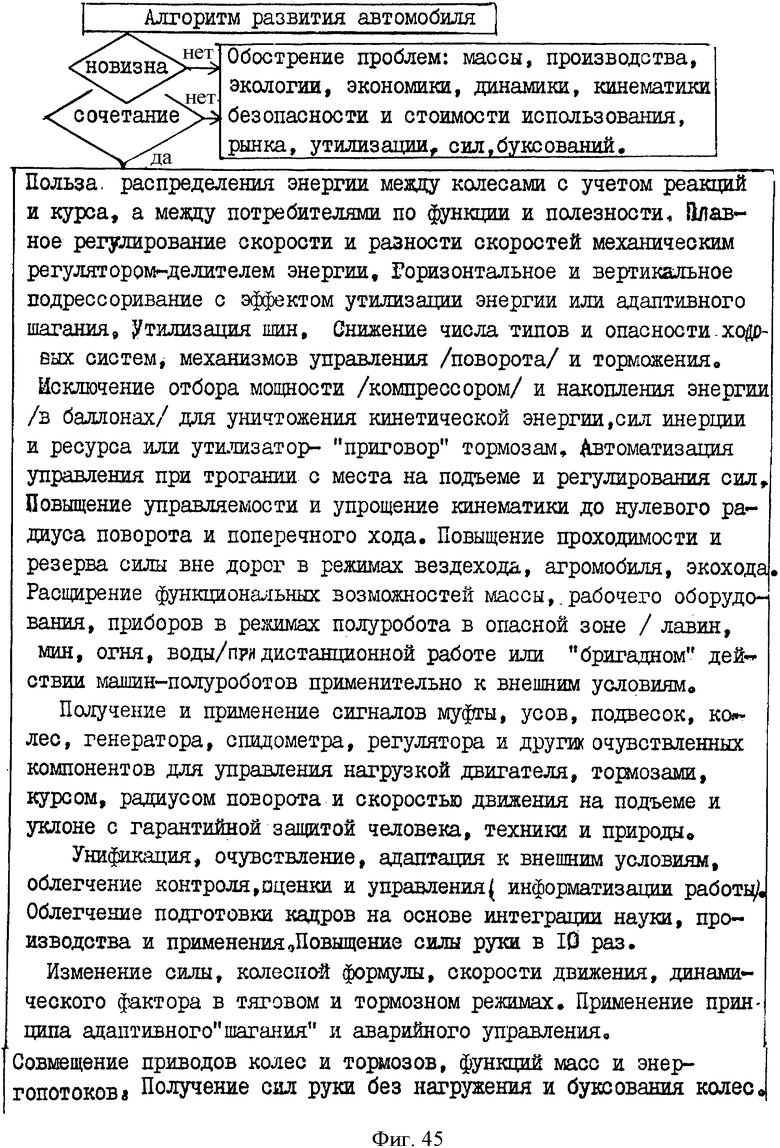
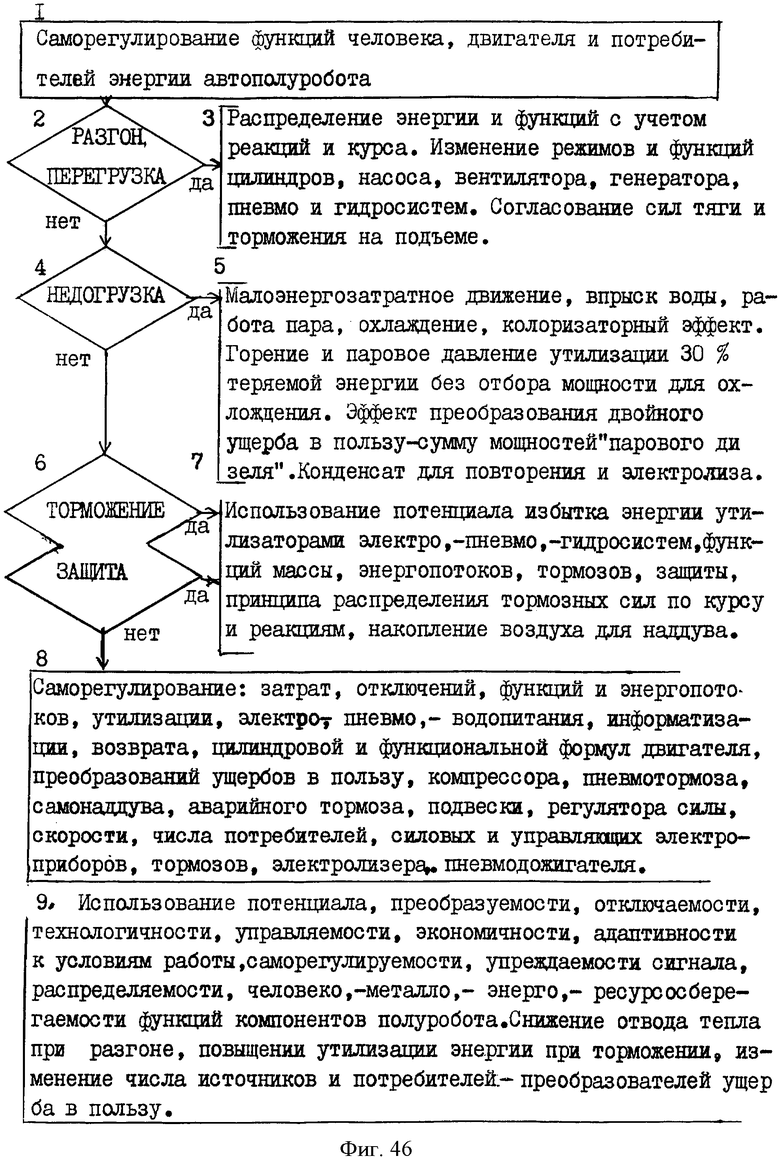
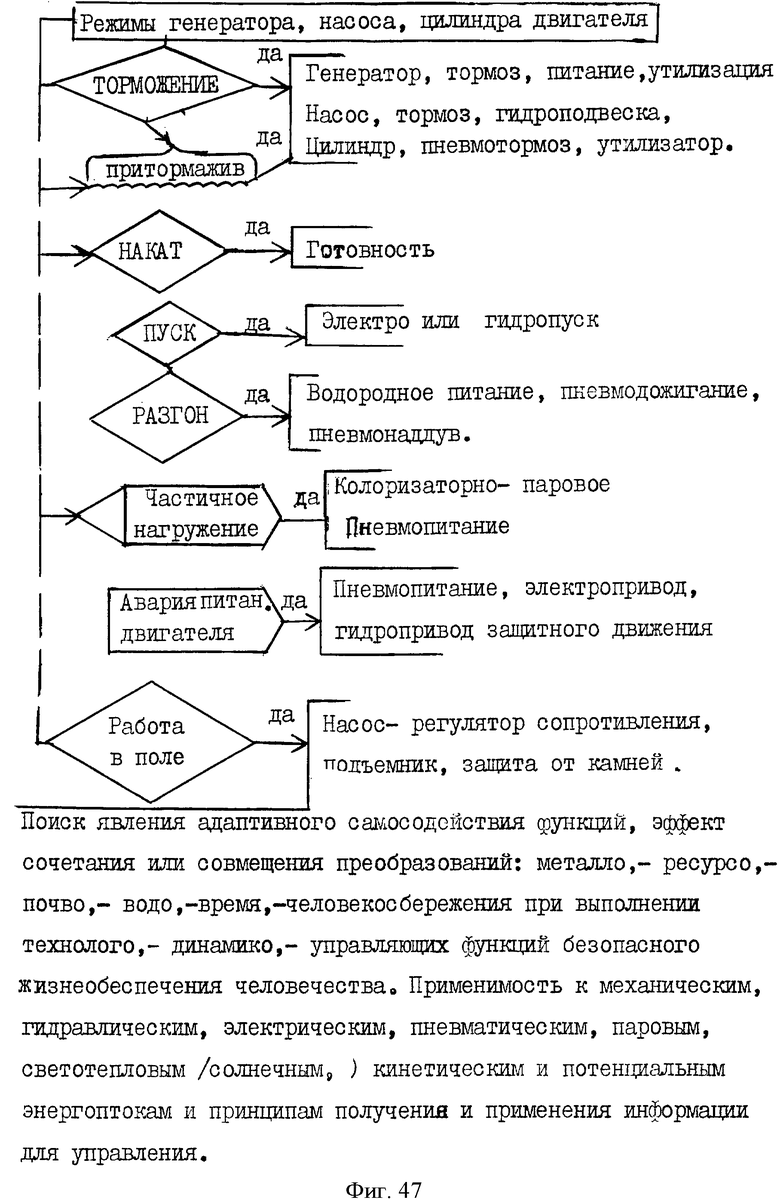
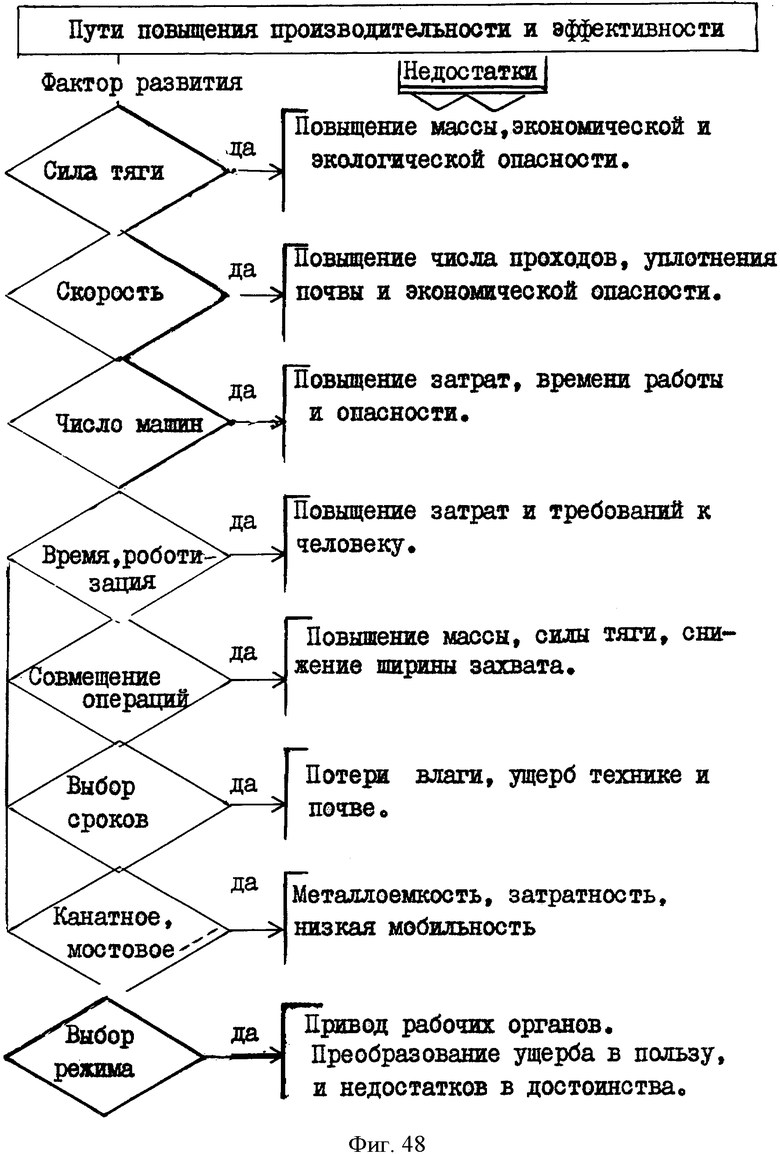
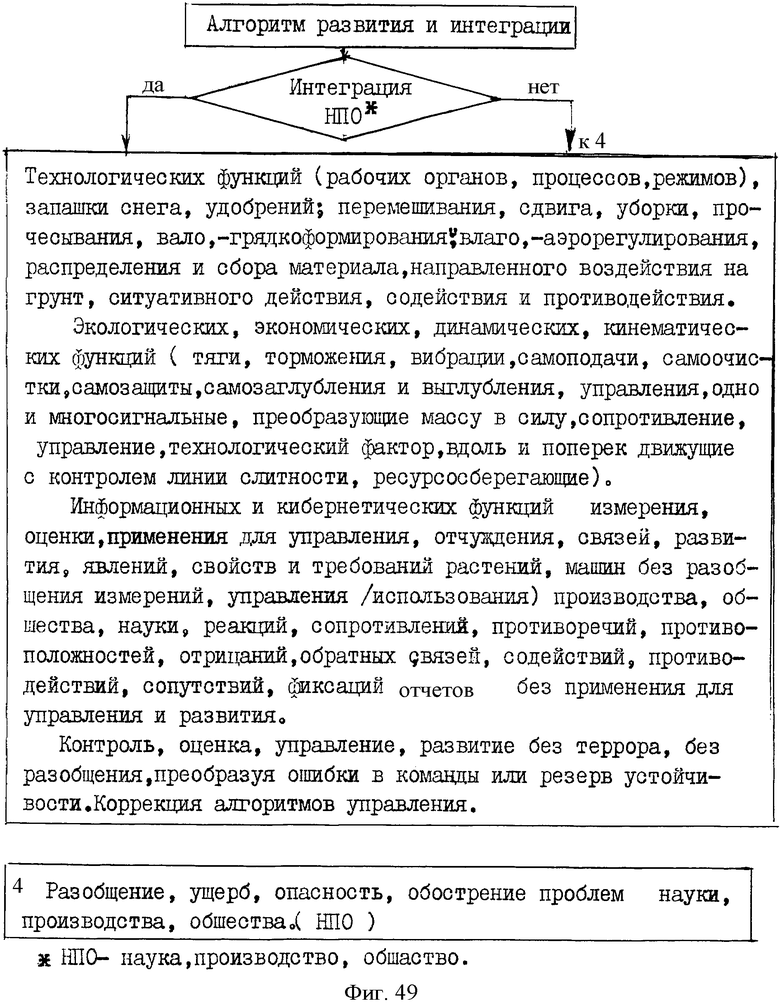
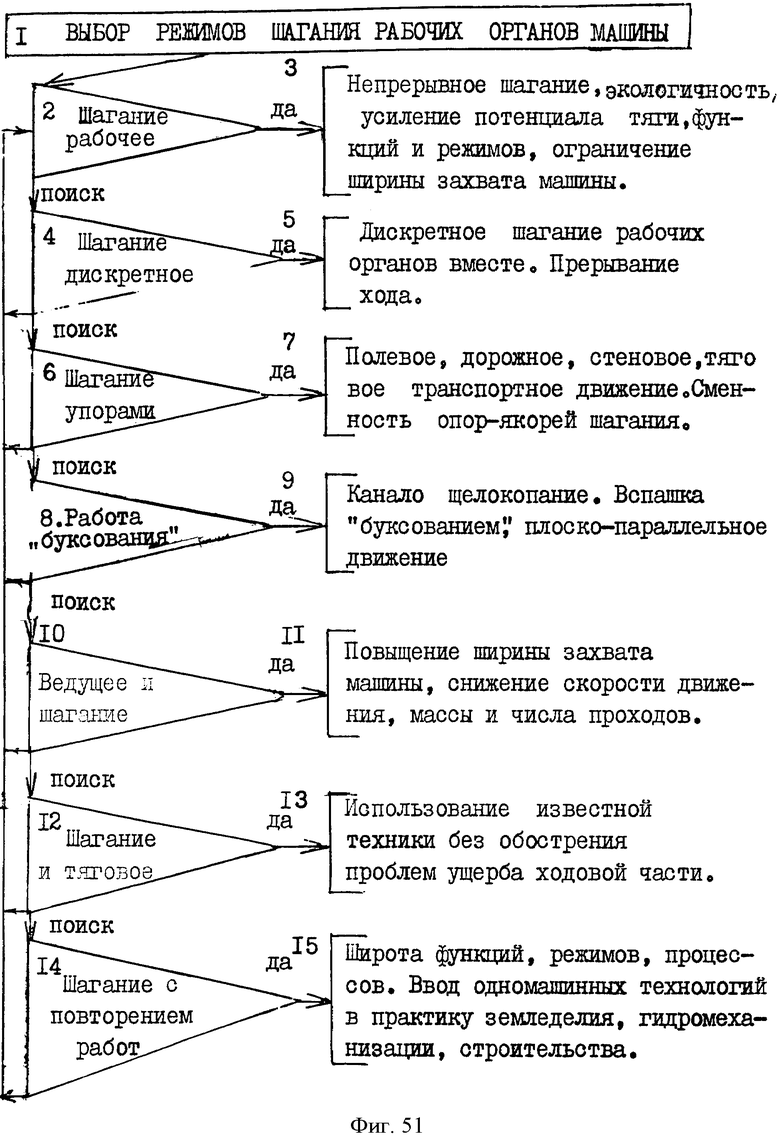
Изобретение относится к машиностроению и использованию машин в различных отраслях, включая обработку земли. Способ управления машиной для обработки почвы включает перемещение и воздействие на нее взаимодействия рабочих органов с почвой. Рабочие органы перемещают вперед на шаг, останавливают. Упором удерживают рабочие органы от отхода назад при перемещении других рабочих органов и машины и повторяют эти движения с любой заданной повторяемостью выполнения работ и без увеличения числа рабочих органов и проходов по полю. Адаптивно снижают нагрузку колес машины без их буксования. При обработке почвы сопротивление шагающего рабочего органа обратному ходу повышают или упорами, чтобы толкающая сила соответствовала требуемой, или самоповоротом шагающего рабочего органа, преобразуя его в упор-якорь. Перемещают шагающие рабочие органы вдоль машины для повышения скорости при малом захвате, поперек - для повышения ширины захвата, или сочетают их, повышая ширину захвата. Перестановкой упоров или ограничителей реверсируют шагающее движение рабочих органов. Шагающие рабочие органы перемещают поочередно или вместе в зависимости от условий работы. При дифференциальном приводе шагающих рабочих органов очередность шагания и скорость перемещения определяют их сопротивлениями рабочих органов. Рабочие органы малого сопротивления располагают впереди рабочих органов с большим сопротивлением и соблюдают очередность работы или защиту при встрече с препятствием. Машина для обработки почвы содержит механизмы перемещения и подъема рабочих органов. Машина также содержит сменные шагающие рабочие органы для обработки почвы, упоры и привод для шагающего продольного движения, а также упоры и привод для поперечного шагающего движения рабочих органов. Привод рабочих органов содержит источник колебания в виде одного шарнира кардана или эксцентричного катка. Машина также содержит направляющие рабочие органы. Сменные шагающие рабочие органы выполнены в виде рабочих органов - плуга, или рыхлителя, или лущильника, или культиватора, или бульдозера, или грейдера, или корчевателя, или кустореза, или иного рабочего органа с упорами для получения движущей силы. Сменные рабочие органы установлены на секциях шагового хода. Рабочие органы установлены поворотно для настройки ширины междурядий. Повышается эффективность производства и использования. 2 н. и 9 з.п. ф-лы, 51 ил.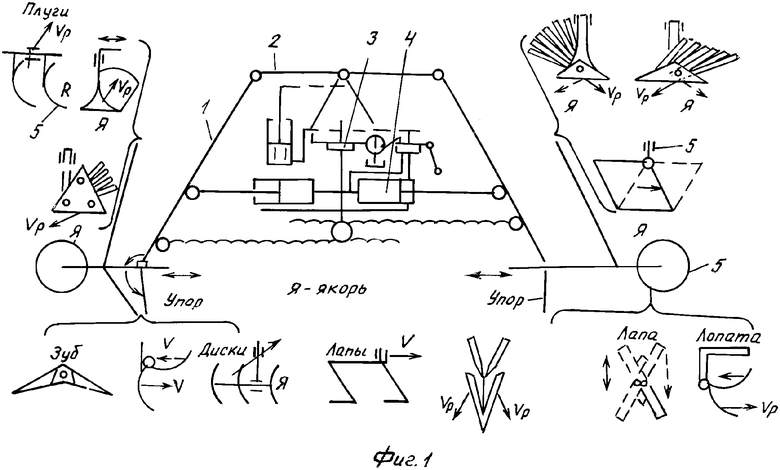
| СПОСОБ УПРАВЛЕНИЯ АГРЕГАТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2086083C1 |
| СПОСОБ ОБРАБОТКИ ЗЕМЛИ И АГРОМАШИНА | 2003 |
|
RU2265298C2 |
| СПОСОБ ОБРАБОТКИ ЗЕМЛИ И МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2222129C2 |
| US 3335809 А, 23.09.1965. | |||

