Изобретение относится к сельскому хозяйству, отраслям обработки земли, грунтов и др. материалов и может быть использовано в качестве многофункциональной и многоцелевой машины в различных отраслях и зонах.
Известен способ обработки почвы, включающий перемещение рабочих органов относительно трактора и вместе с ним (пат. 2073387 и 2086083). Перемещение реверсивных рабочих органов относительно трактора с возможностью преобразования сопротивления рабочих органов в движущую силу повышает эффективность применения энергии и использования земли, влаги, агросроков, металла.
Недостатком известного объекта является трудность формирования целевого состояния земли при малом числе рабочих органов на тяжелых почвах и при обработке грунтов (сооружении каналов, дамб, дорог, траншей и т.д.). Повторение проходов и применение дополнительных рабочих органов снижает эффективность работы.
Целью изобретения является повышение эффективности формирования целевого состояния земли и расширение функциональных возможностей техники.
Основой изобретения является расширение: функций, диапазона изменения сил и скоростей, режимов работы при малой нагрузке, зависимости производительности от тяговых возможностей колес с возможностью комплексного решения проблем: улучшения динамики, повышения экономичности, управляемости, проходимости, плавности хода и устойчивости; роботизации процессов без дорогостоящих средств вождения и регулирования режимов работы.
Сущность - изменяя скорость, регулируют повторение функций рабочих органов и формируют целевое состояние земли.
Поставленная цель достигается тем, что целевое состояние земли формируют изменением скорости прямо пропорционально числу нетормозных рабочих органов (оборотного типа), сопротивление которые можно преобразовать в движущую силу при вспашке, лущении, культивации, бороновании, катковании с возможностью повторения функций без увеличения числа проходов или числа рабочих органов. Сочетанием изменений функций и их повторений-работ нетормозящих рабочих органов снижают функции ходовой части, работу оценивают параметром "функция•время". Культурно-технические, дорожно-строительные и мелиоративные работы выполняют рабочими органами в нетормозном режиме. Силы и скорости движения трактора снижают, производительность повышают путем совмещения функций элементов техники, работу оценивают коэффициентами полезного и вредного действий. Пропорционально сопротивлению земли рабочие органы и их секции поворачиваются, ширина поперечного захвата и скорость движения снижаются без изменения ширины захвата всей машины. Секцию рабочих органов поворачивают пропорционально внешнему сопротивлению в сторону снижения ширины захвата и стабилизируют нагрузку без изменения глубины обработки и ширины захвата машины. По мере увеличения глубины обработки земли ширину захвата рабочего органа снижают и стабилизируют нагрузку двигателя при минимальной нагрузке колес.
Зараженную, засоренную и загрязненную почву запахивают глубоко, снижая ширину захвата рабочего органа без его перегрузки.
Изношенную шину делят на части и используют без камер. Части изношенной шины используют для технологического воздействия на землю, проведения поверхностной обработки почвы. При дистанционной работе силу передают стенке борозды катком. Правооборачивающий рабочий орган преобразуют в левооборачиваюший путем поворота лемешно-отвальной поверхности под действием сопротивления почвы между ограничителями вокруг двух осей в конце каждого хода.
Движущие силы распределяют между бортами (колесами оси) с учетом направления движения и реакций земли. В тормозном режиме движения силы торможения распределяют между колесами с учетом реакций земли и направления движения. Целевую траекторию формируют суммированием функций колес и рабочих органов. Опуская корпус на грунт (почву), машину тормозят до остановки и удерживают неподвижно после остановки. Скорости переключают путем гидросинхронизации скоростей. Функции бортового редуктора, тормоза и гидромашины совмещают. Энергопотоки привода колес, тормозов и подъемника соединяют. Целевое состояние земли формирует сумма функций рабочих органов и их повторения. Норму функции формируют при малой нагрузке колес изменением скорости движения агрегата, снижая скорость до нуля, переключают энергию на повторение функций. Отношение скоростей перемещения рабочих органов и движения агрегата формирует отношение целевого и исходного состоянии земли. При снижении тяговых функций колес возрастают кибернетические и агротехническая эффективность работы машины пропорционально снижению тяговых функций и буксования колес. Сигнал муфты о моментной нагрузке можно использовать для гидросинхронизации и управления режимами работы. Сочетание оборотности рабочих органов в тормозном и ведущем режимах уравновешивает агрегат.
Многоцелевая машина содержит оборотные рабочие органы с двумя осями самоповорота (под действием сопротивления) между ограничителями в двух плоскостях при реверсивном движении около трактора.
Оси самоповорота смещены от центров сопротивлений в двух плоскостях. Рабочие органы соединены с приводом с возможностью изменения шага. Рабочий орган для обработки земли имеет лезвия с четырех сторон и места крепления с двух сторон. Хотя бы колесо машины содержит части изношенной шины. В шинную полосу из утиля вставляют шипы и используют в качестве сменного протектора повышенного оцепления. Части изношенной шины устанавливают на поверхностях листов рессор муфт и тормозов.
Трансмиссия многоцелевой машины содержит гидросинхронизатор переключения скоростей без разрыва потока мощности. Гидропривод тормозов прицепа соединен с гидроподъемником кузова. Гидропривод тормозов прицепа совмещен с приводом колес с возможностью включения тормозного и ведущего режимов.
Машина содержит систему оборотных рабочих органов и привод для их перемещения относительно трактора с возможностью преобразования сопротивления в толкающую силу и снятия ограничений производительности силами тяжести и тяги, шириной захвата, скоростью, числом проходов по полю, энергозатратами, агросроками, влажностью почты, ходовой частью, мощностью и т.д.
Эксплуатационные качества улучшают и функции расширяют снижением тяговых функций колес - зависимости управляемости, устойчивости, грузоподъемности, проходимости, плавности хода, обзорности и экономичности от места размещения машины (впереди, сбоку, сзади). Независимо от расположения машины подача вперед возможна гидроцилиндром в линии предохранительного клапана, или конечным переключателем, или силой конечного упора, если рабочий орган отводится от камня поворотом или подъемом.
Реверсивную работу облегчает установка ролика на отвале, установка реверсивного крыла с возможностью самоперестановки под действием сопротивления. Рабочий орган в виде трапеции с лезвиями с четырех сторон поворачивается для оборота пласта в одну и другую стороны, может работать в ведущем и тормозном режимах, оборачиваться в обе стороны путем поворота вокруг одной оси, поворачиваться вокруг вертикальной оси между ограничителями пропорционально сопротивлению и упругой силе этих ограничителей. Оси поворота смещены от центров сопротивлений, что придает самоустанавливаемость, самопереставляемость. Это свойство придает рабочему органу и наклон оси в продольной плоскости, т. к. проекция оси располагается впереди вектора сопротивления и возникает момент.
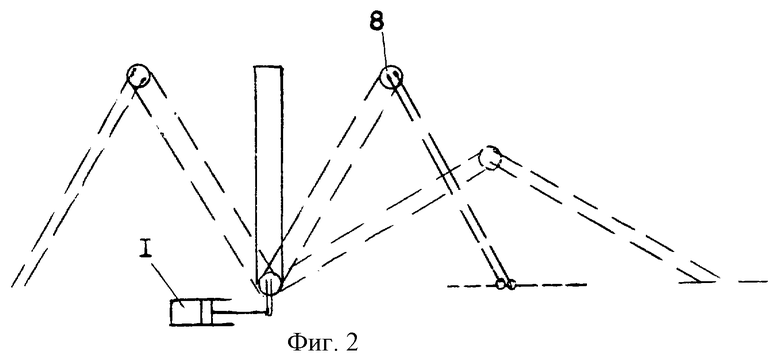
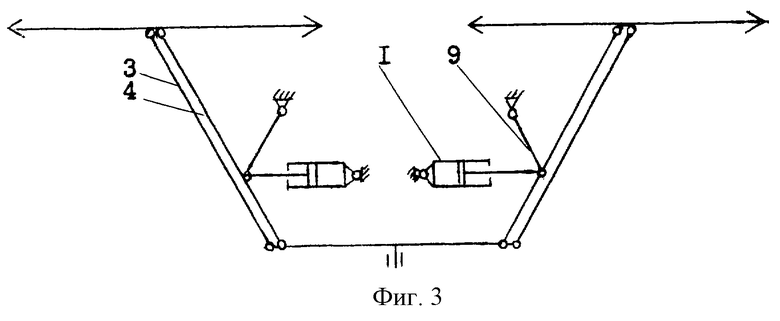
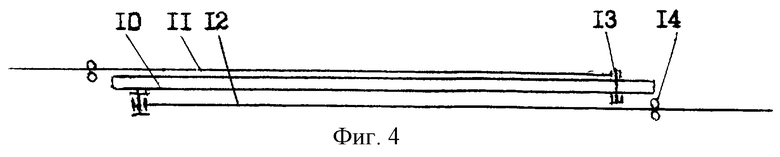
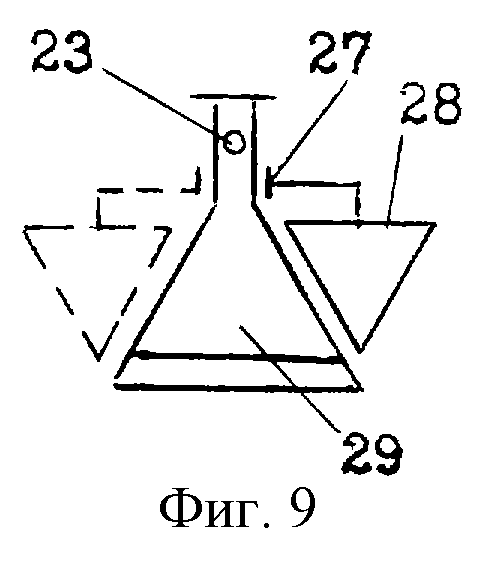
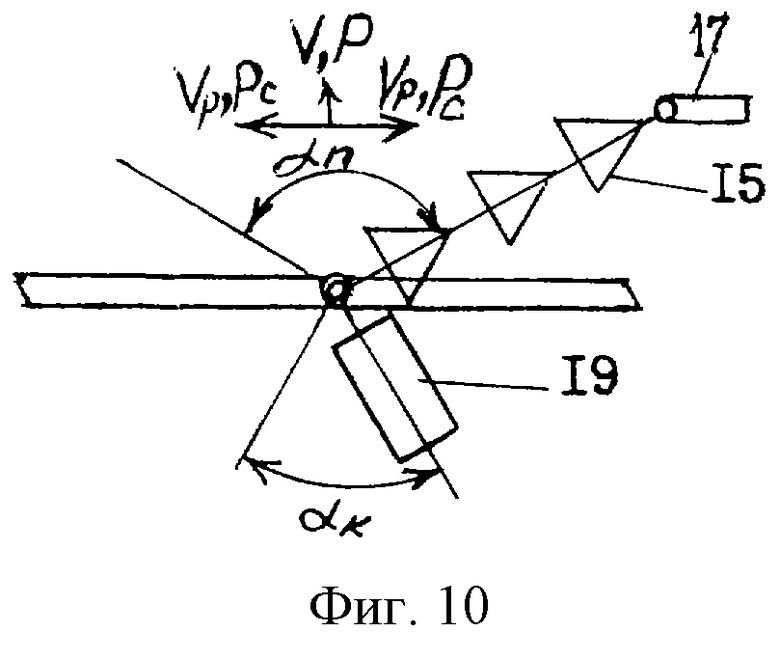
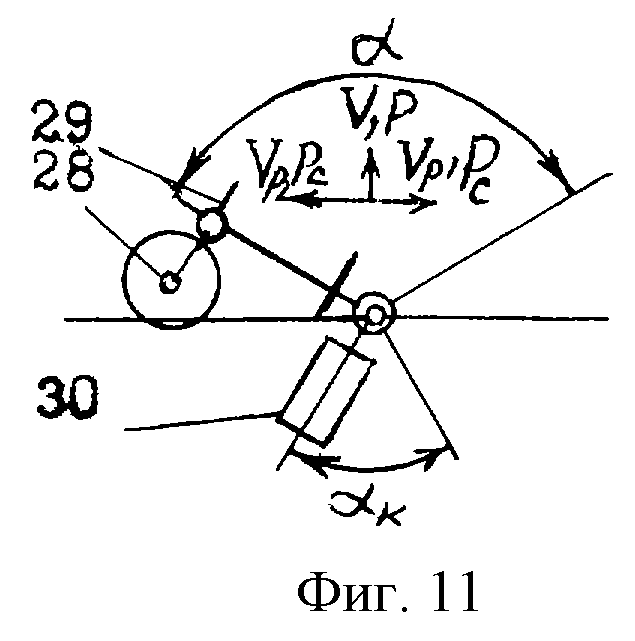
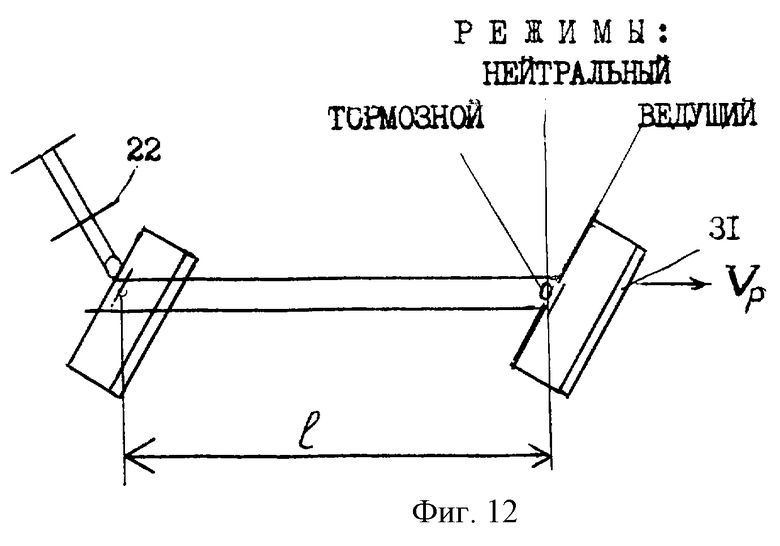
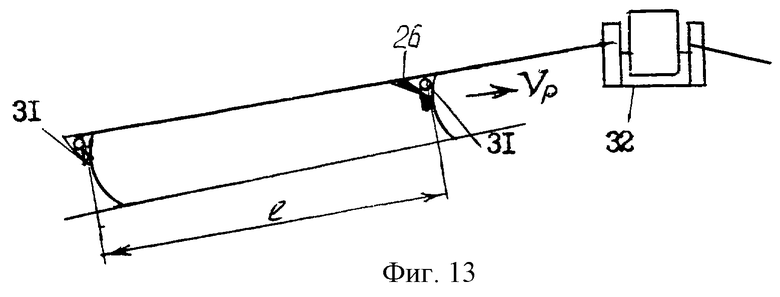
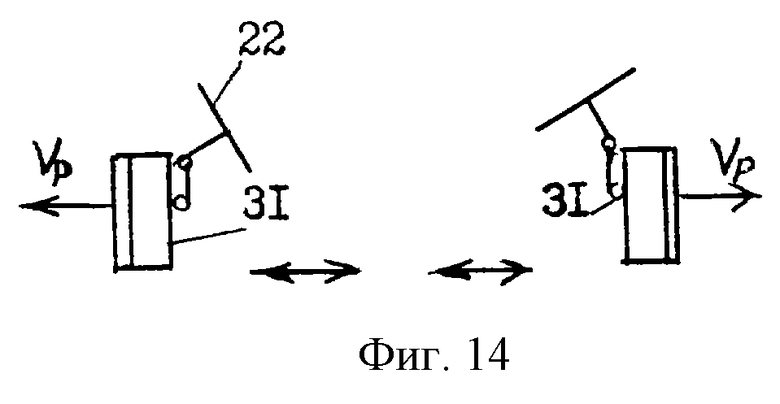
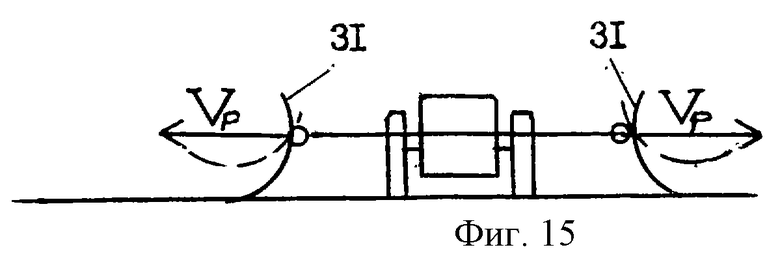
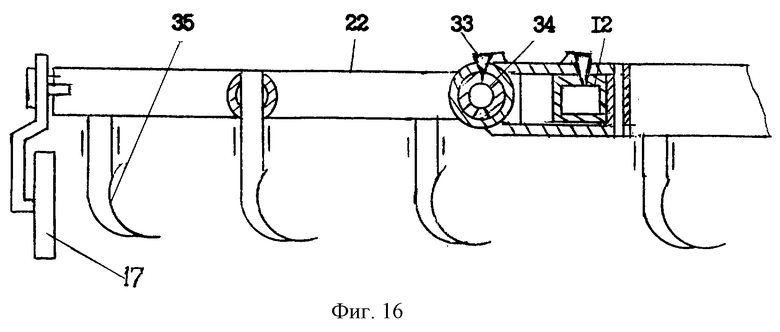
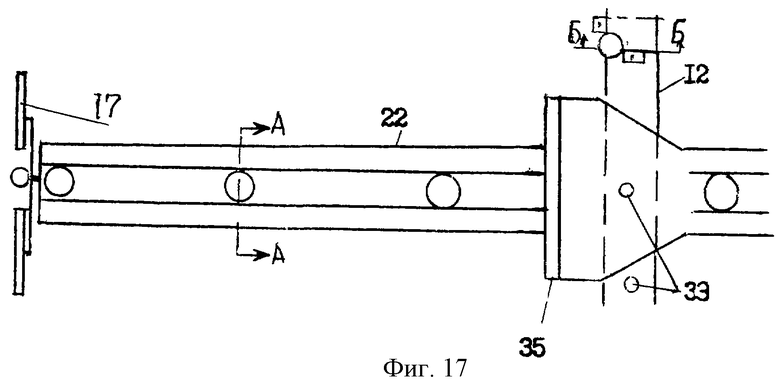
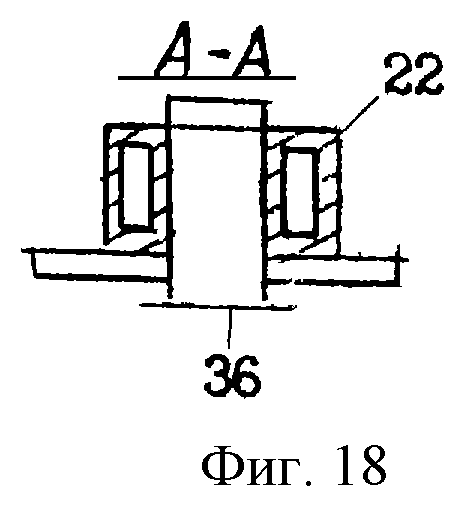
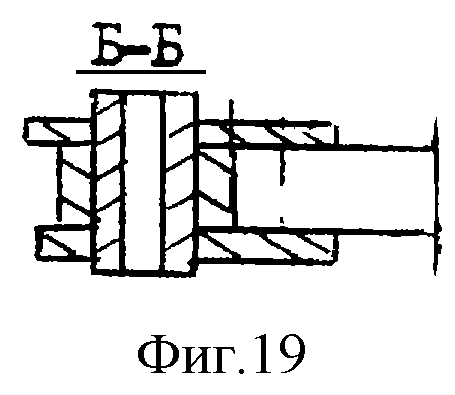
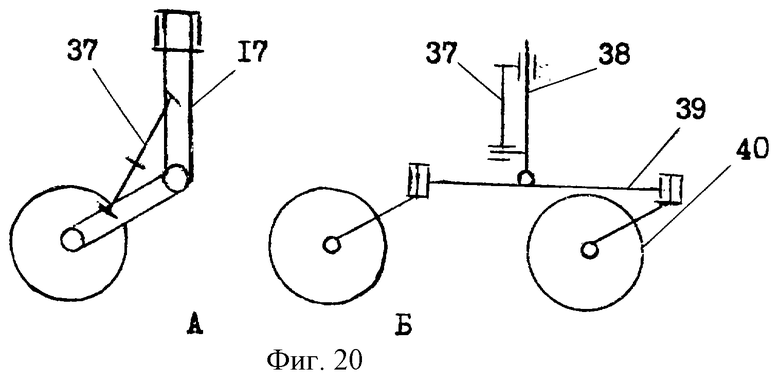
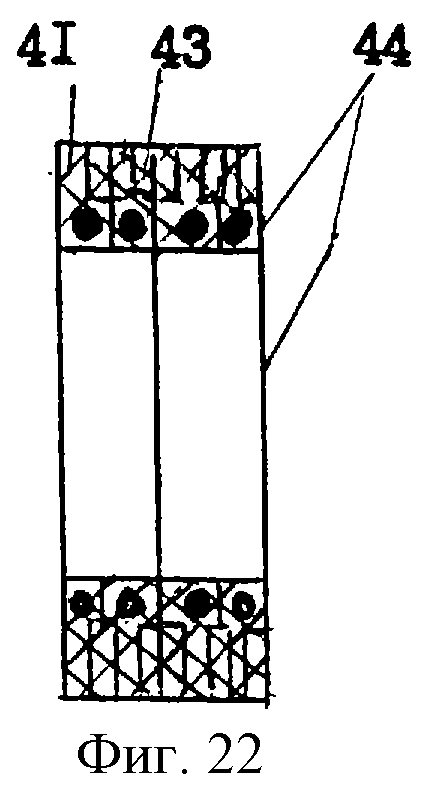
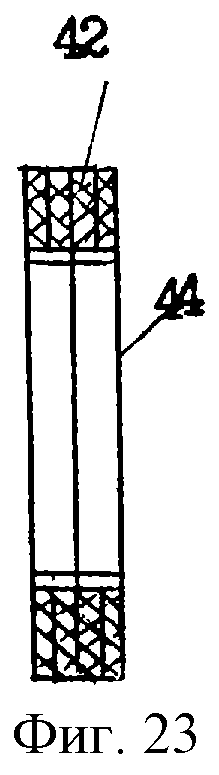
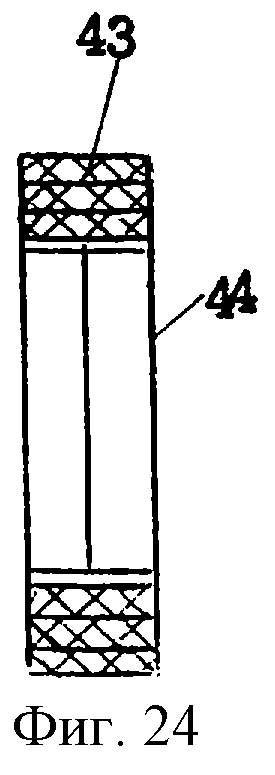
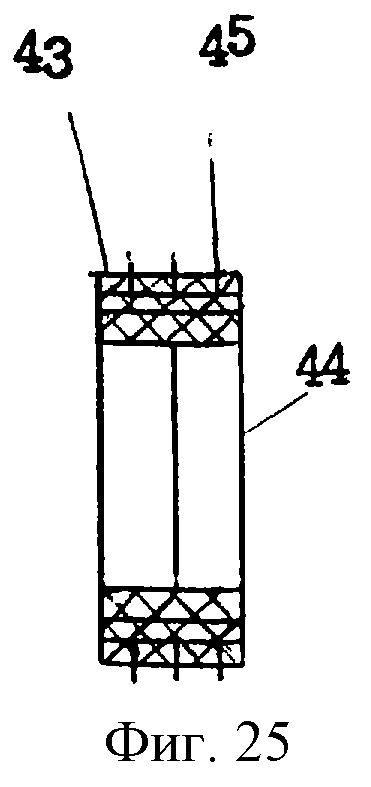
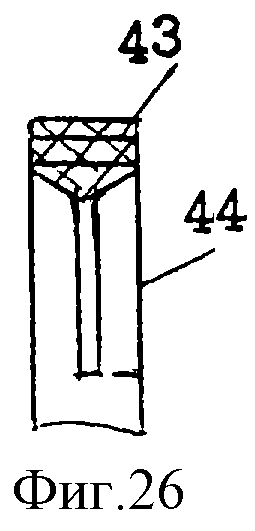
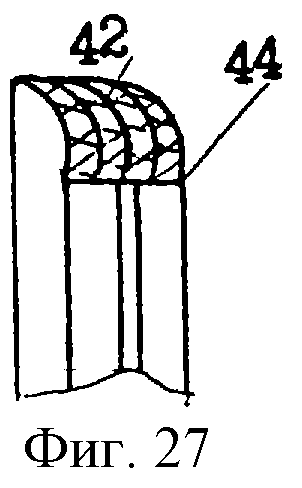
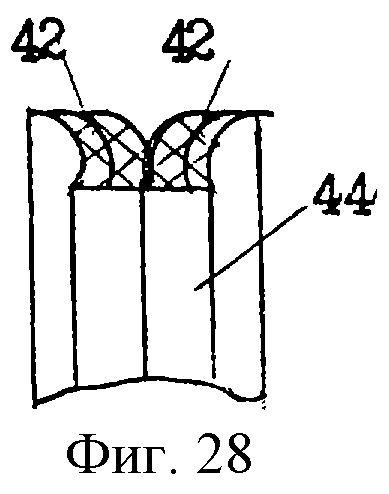
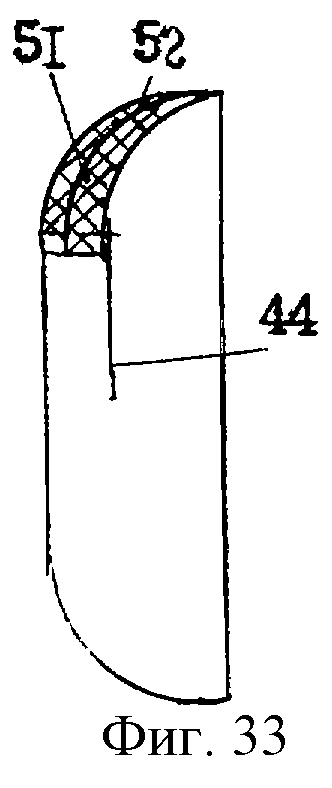
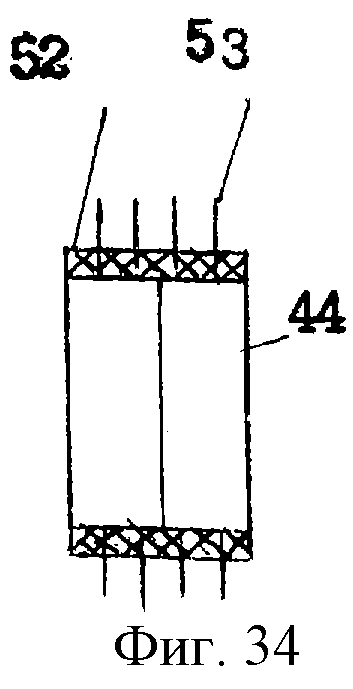
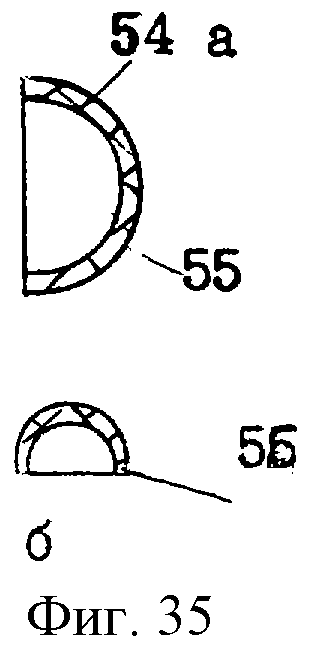
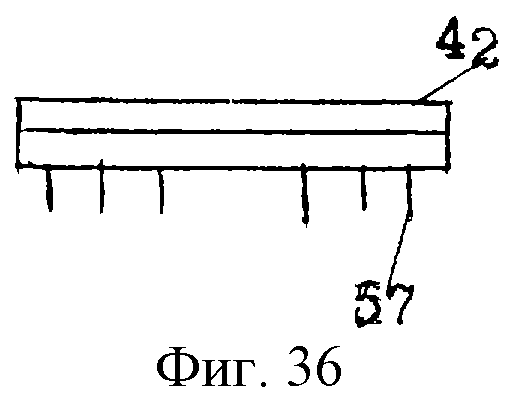
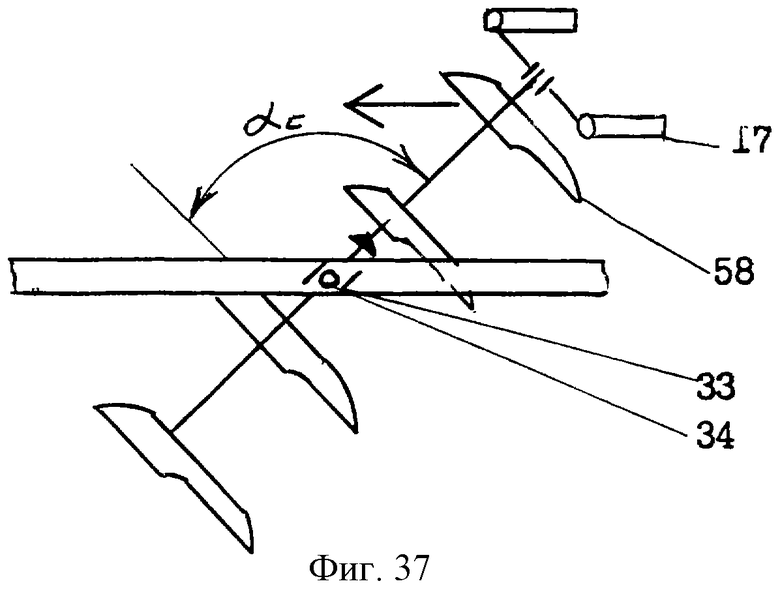
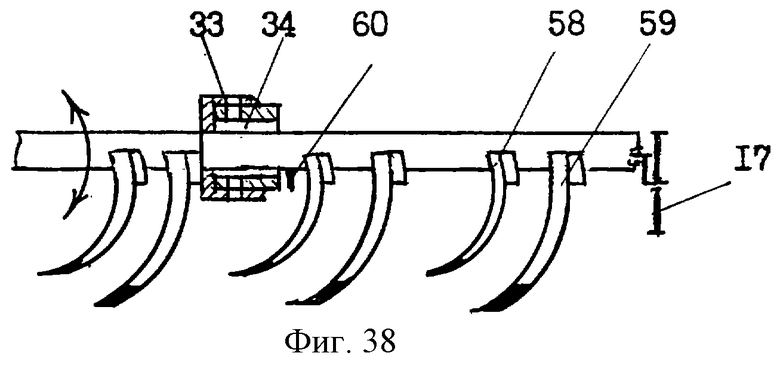
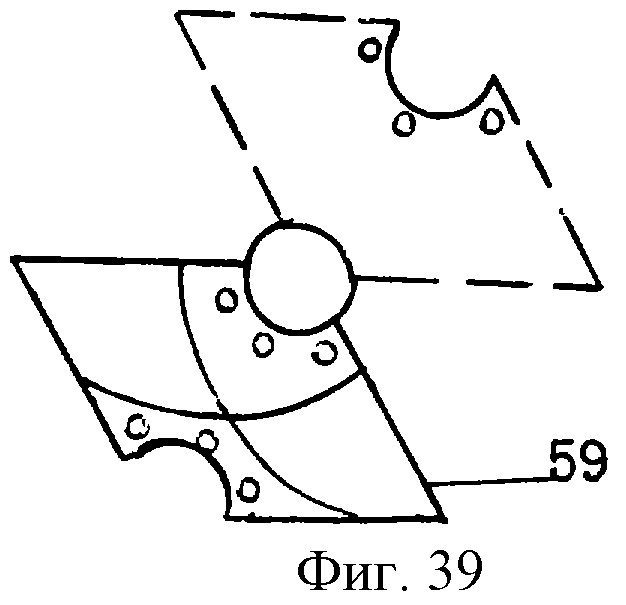
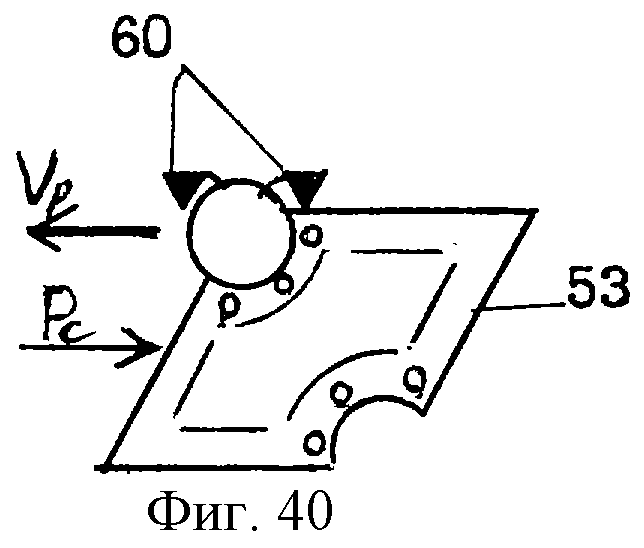
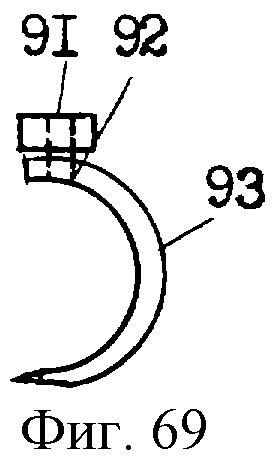
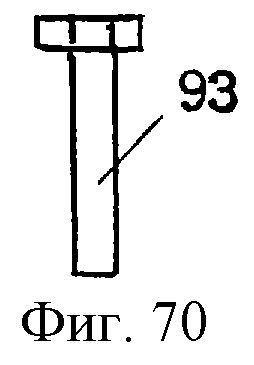
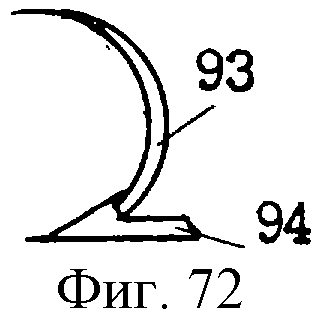
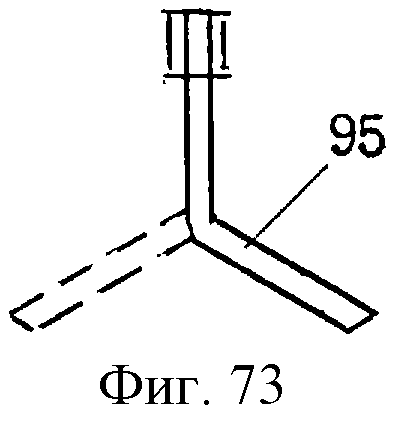
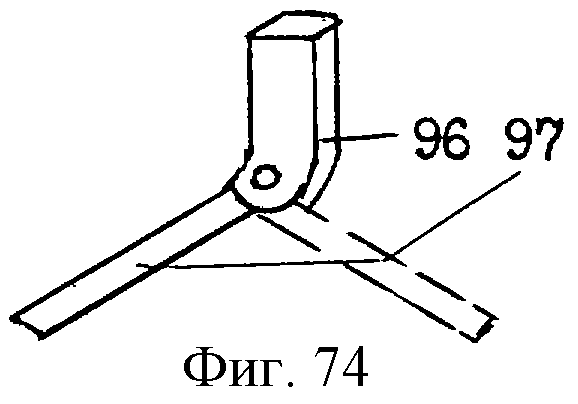
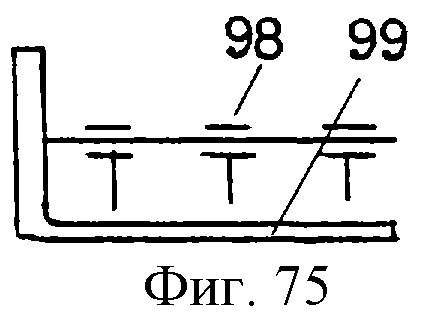
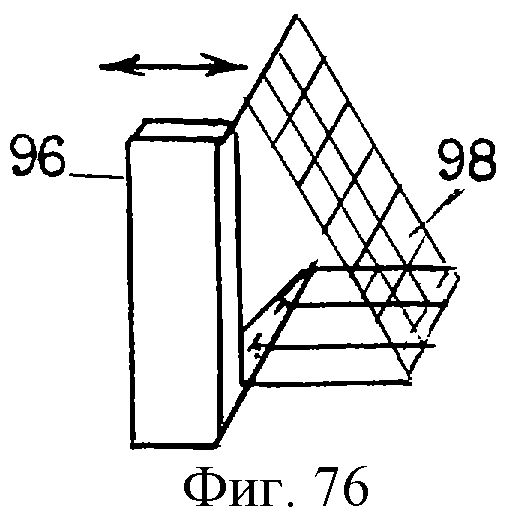
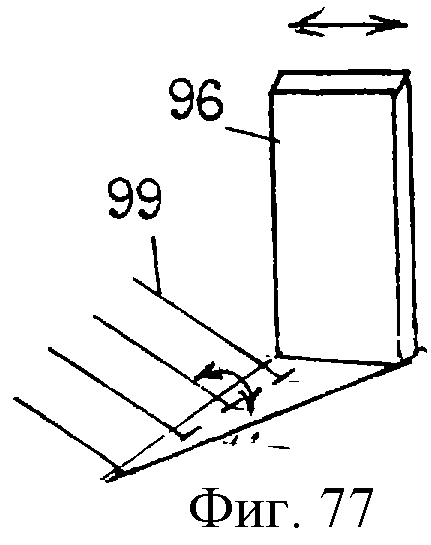
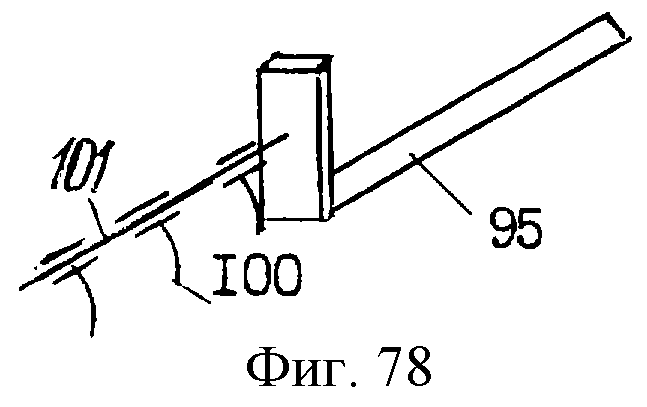
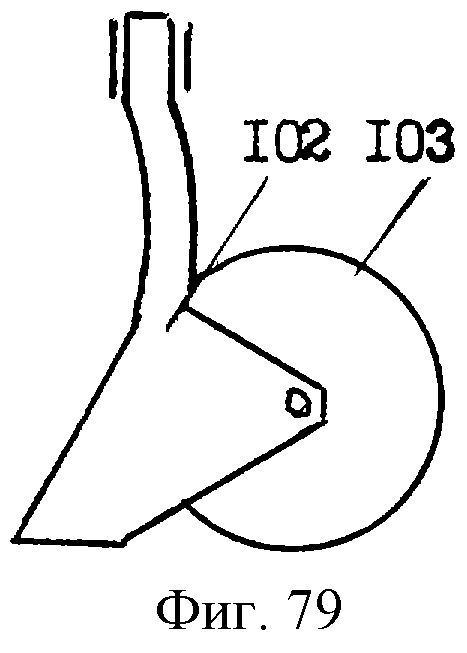
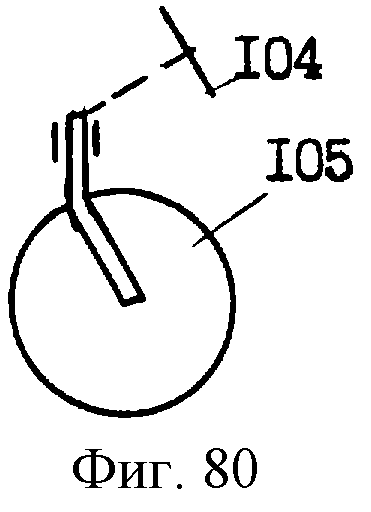
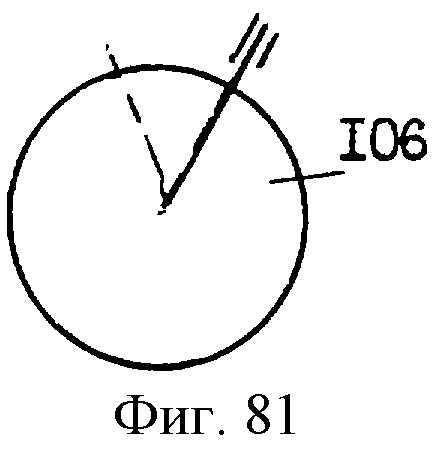
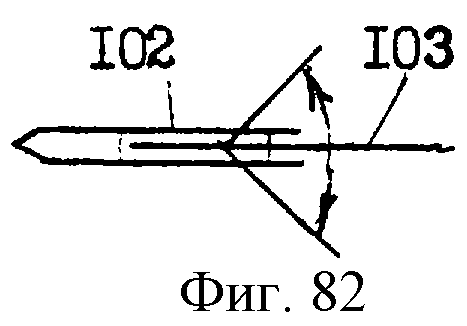
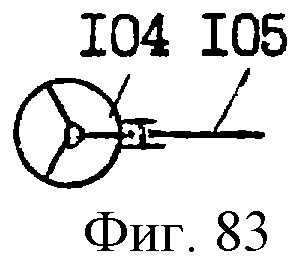
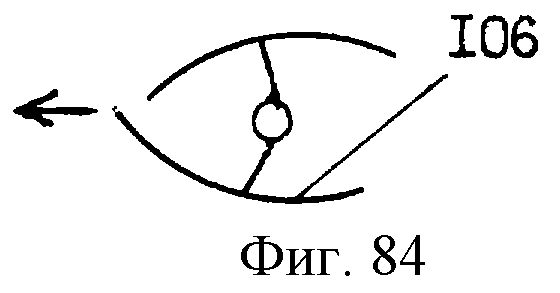
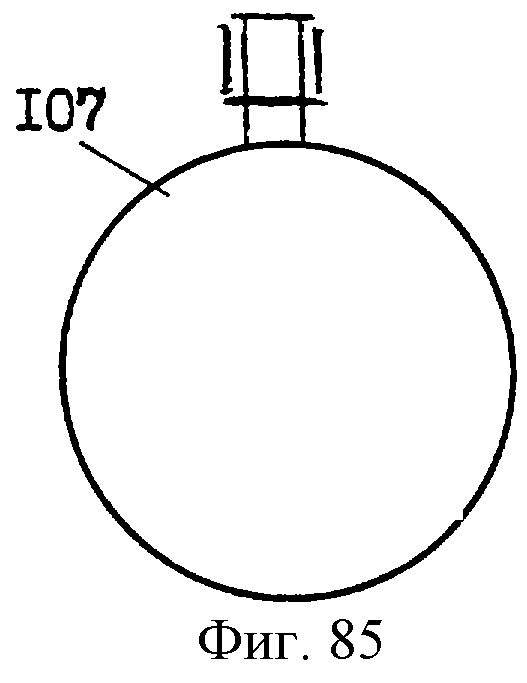
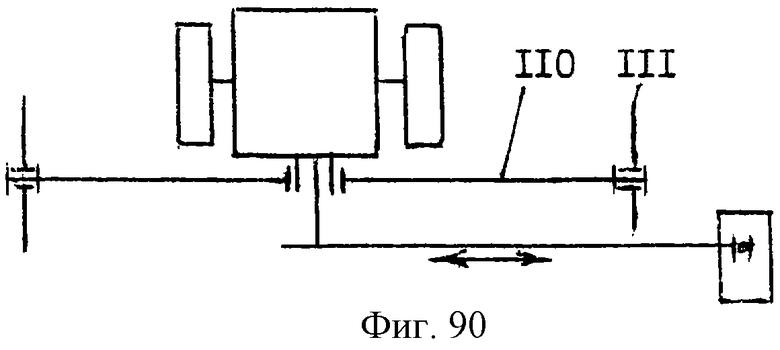
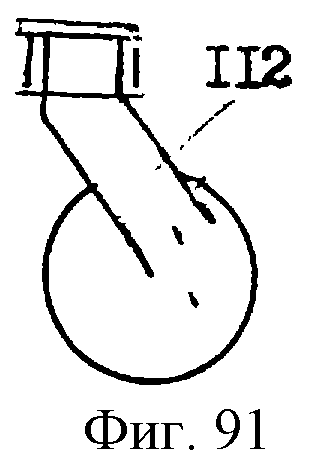
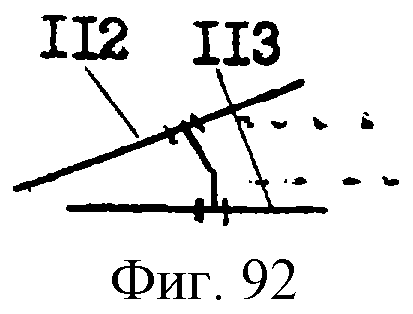
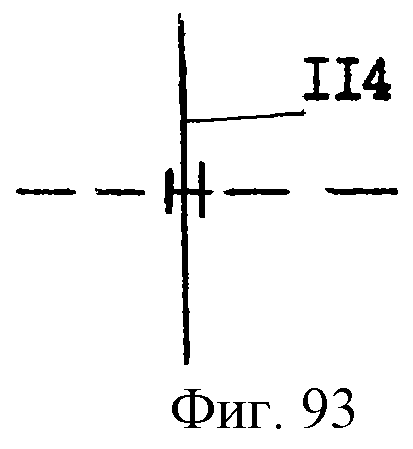
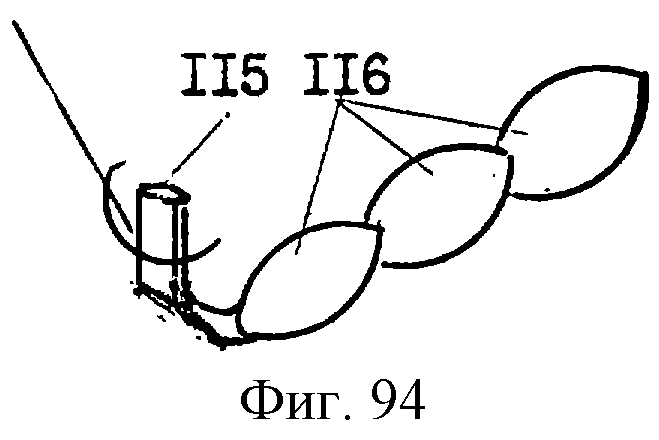
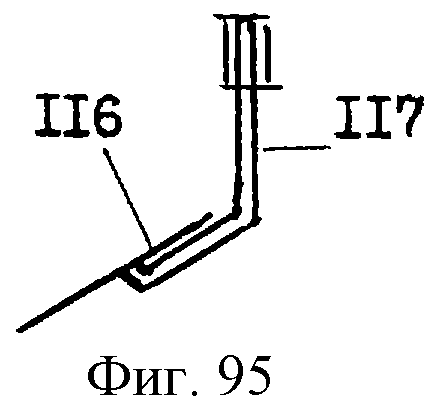
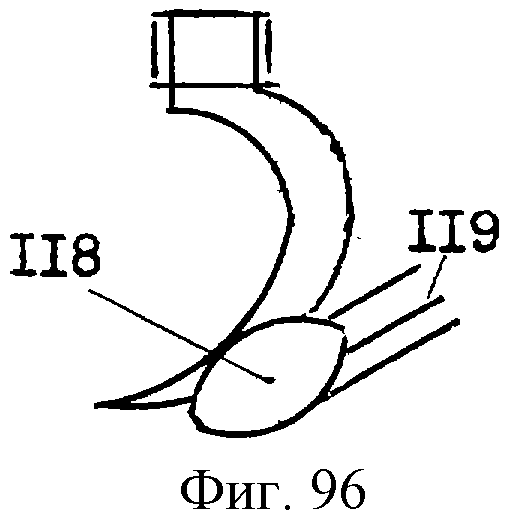
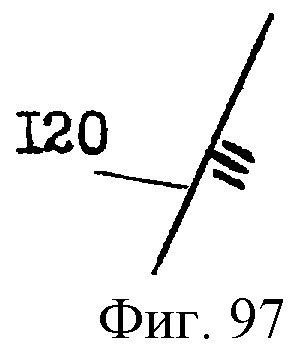
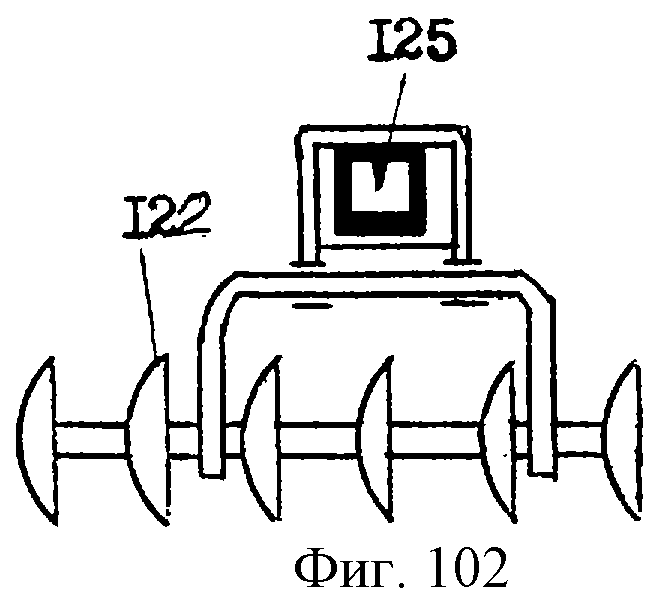
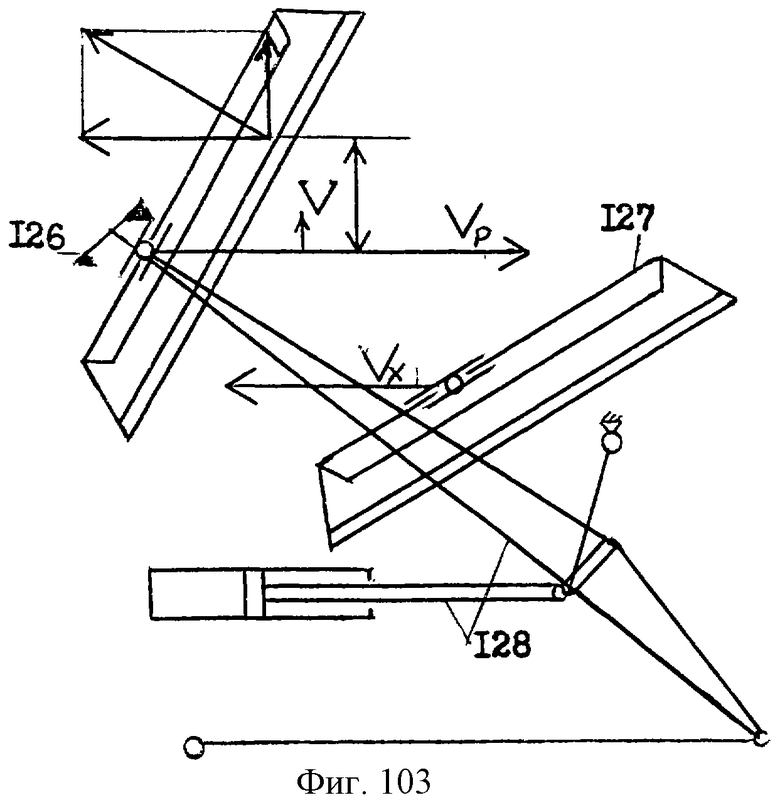
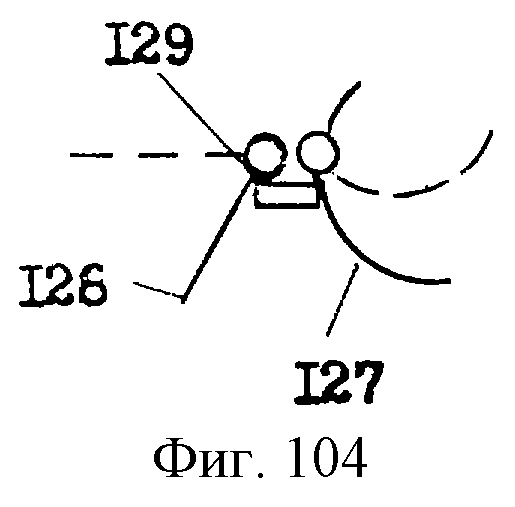
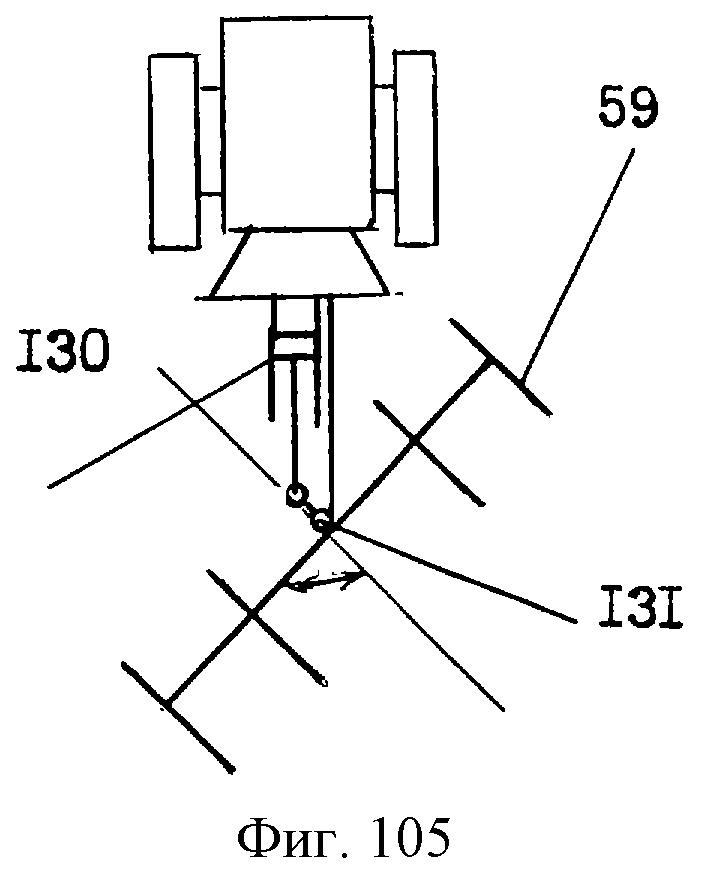
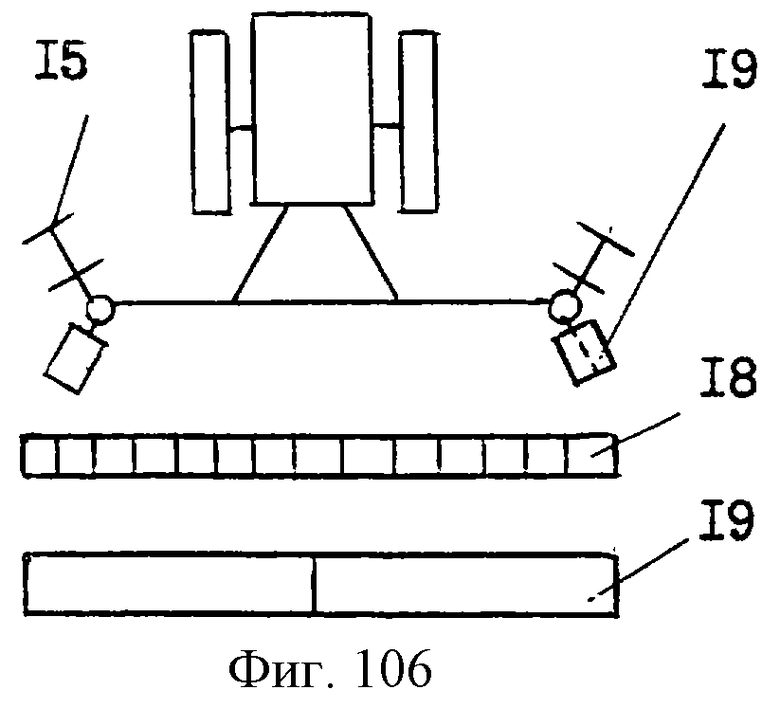
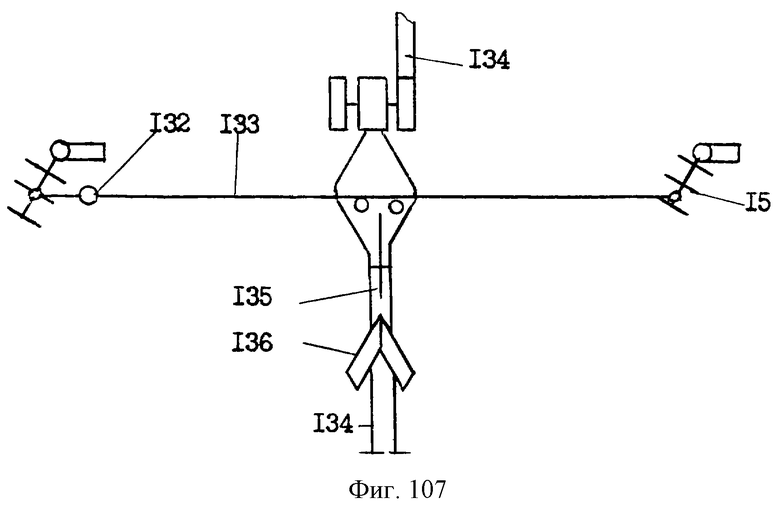
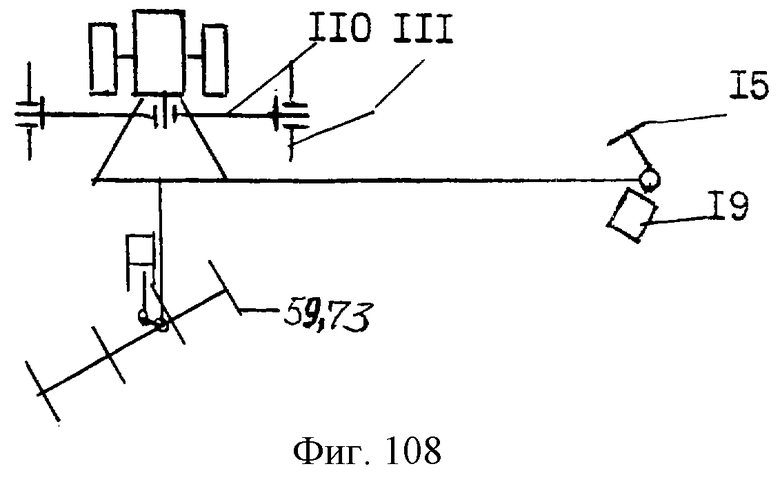
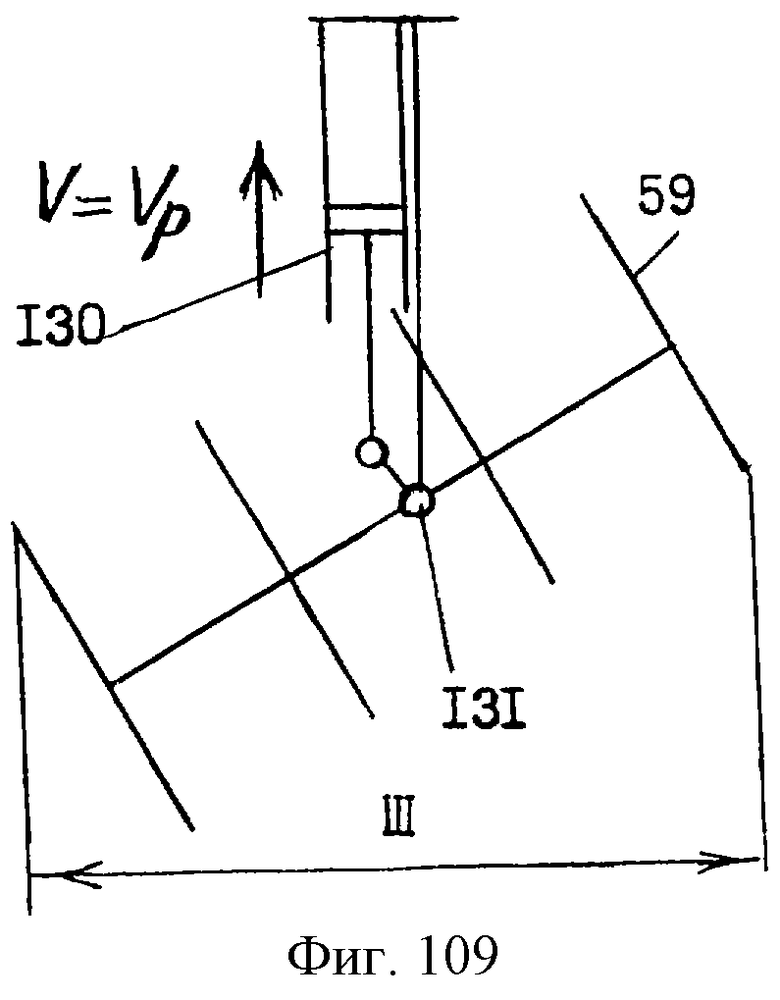
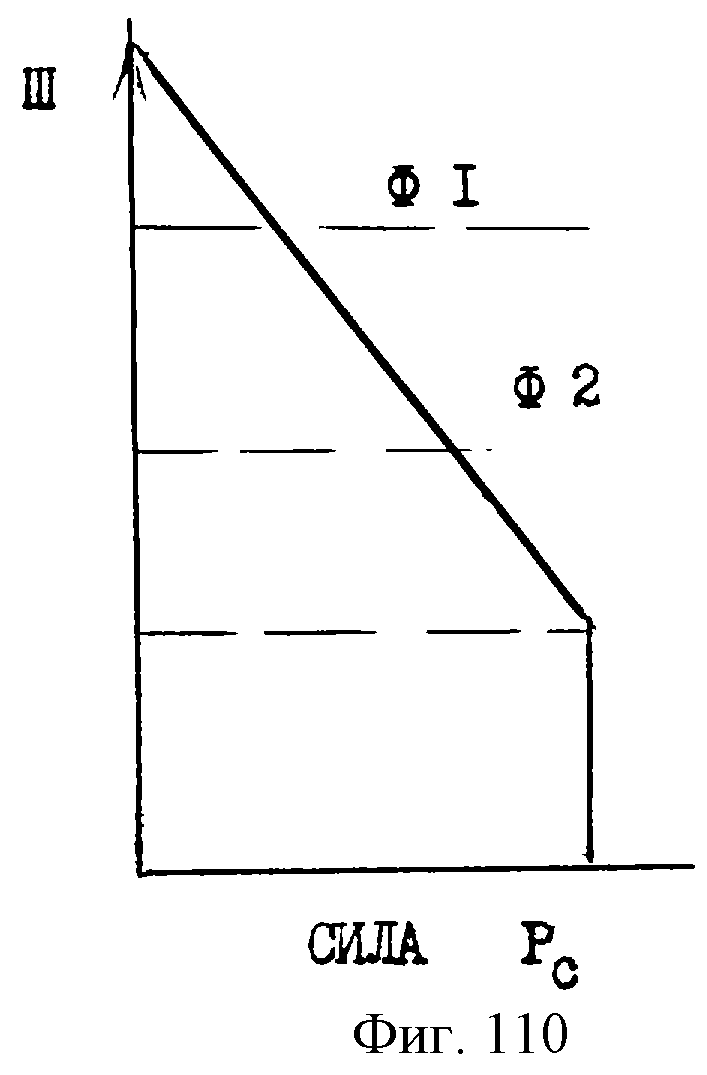
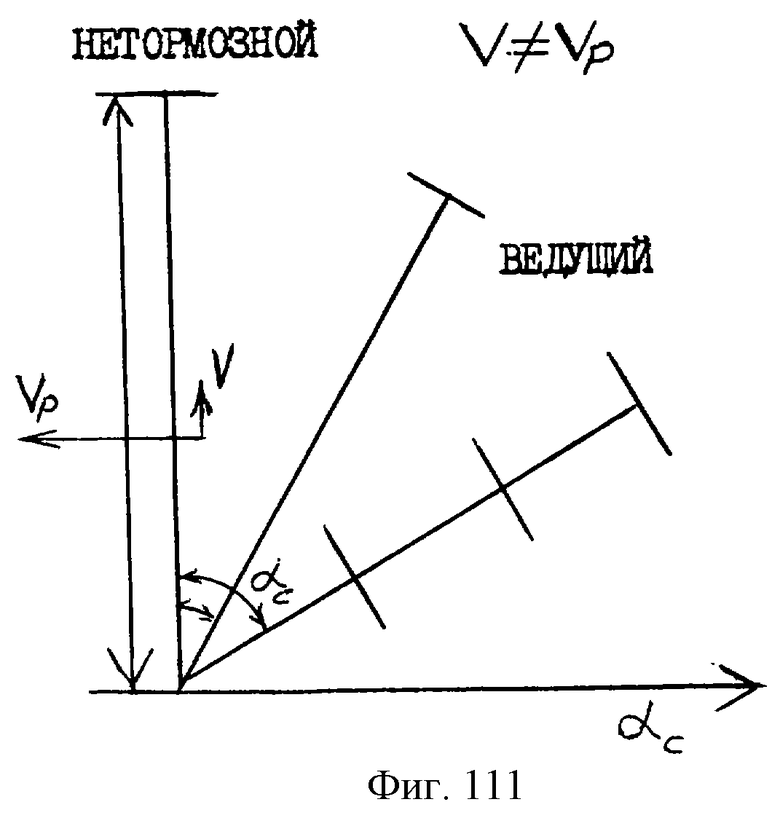
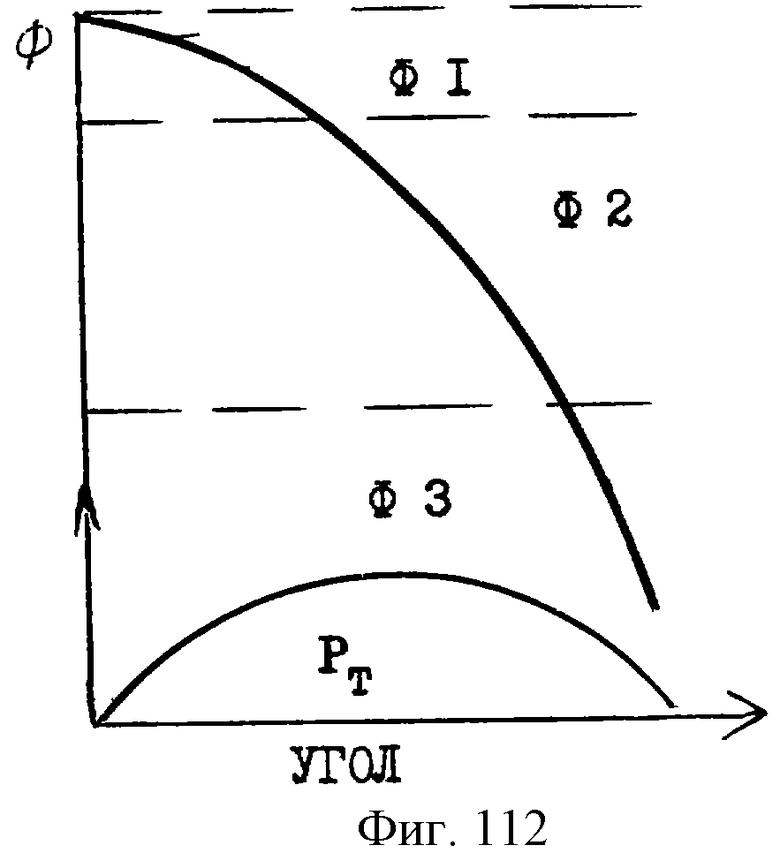
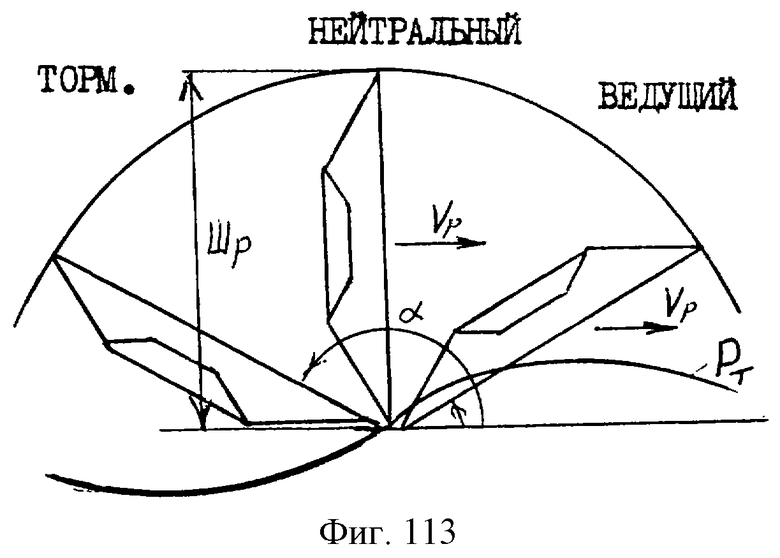
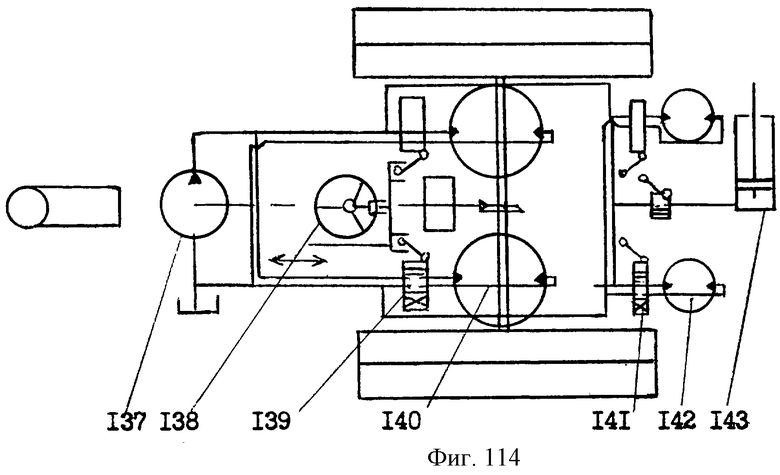
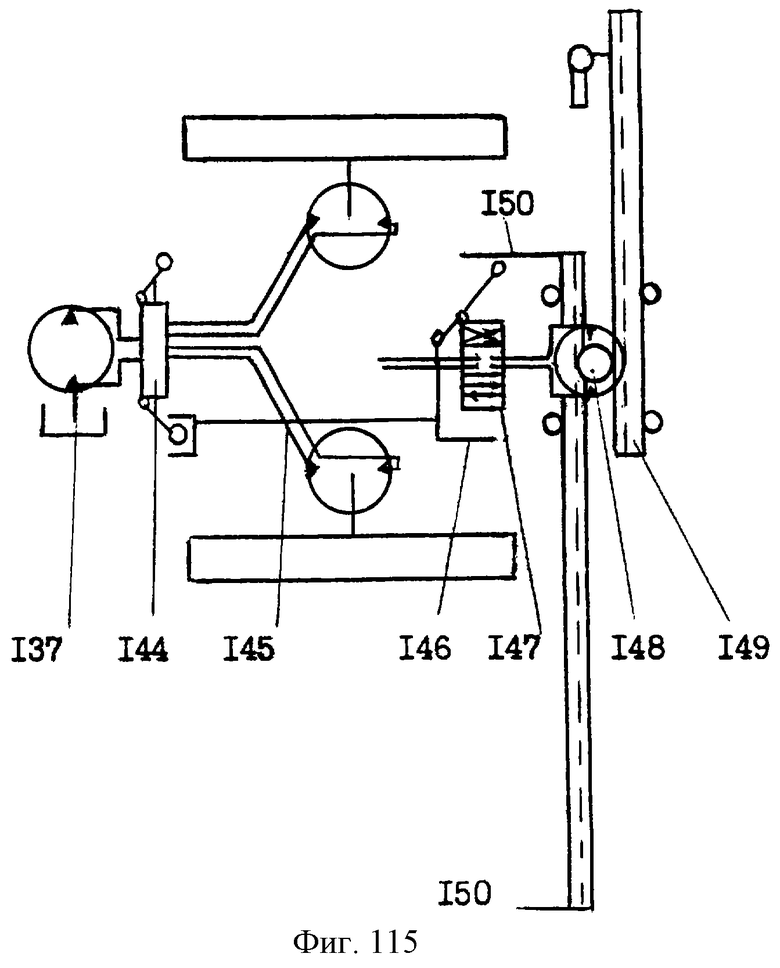
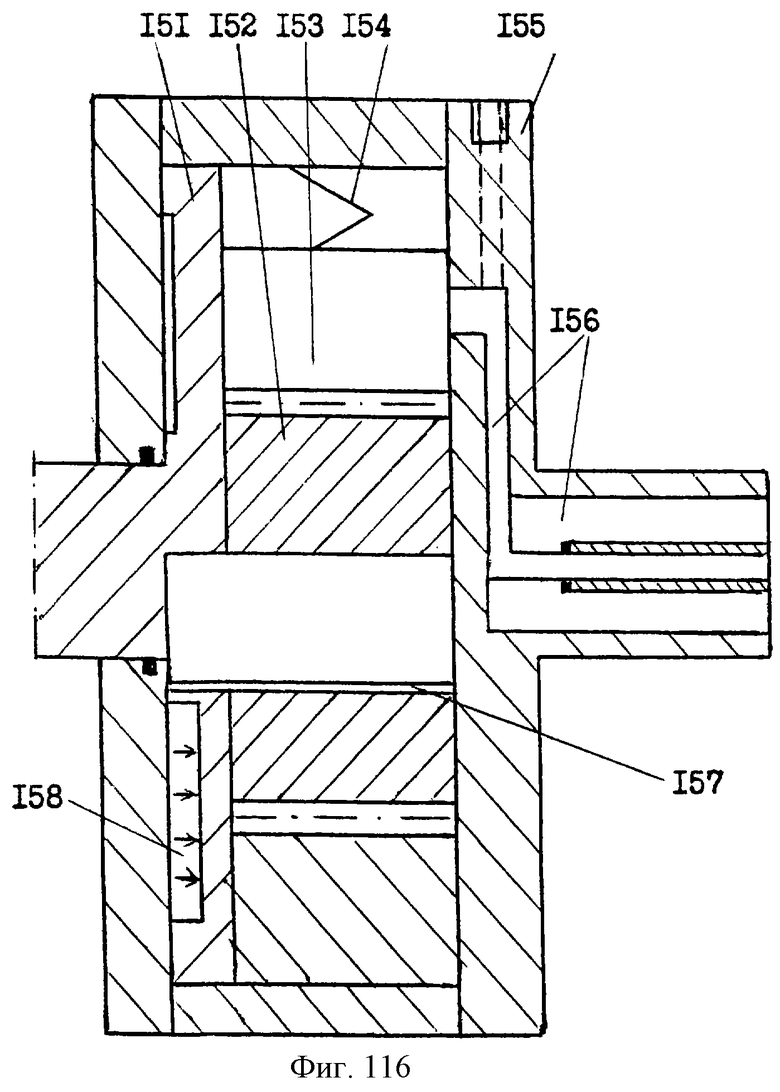
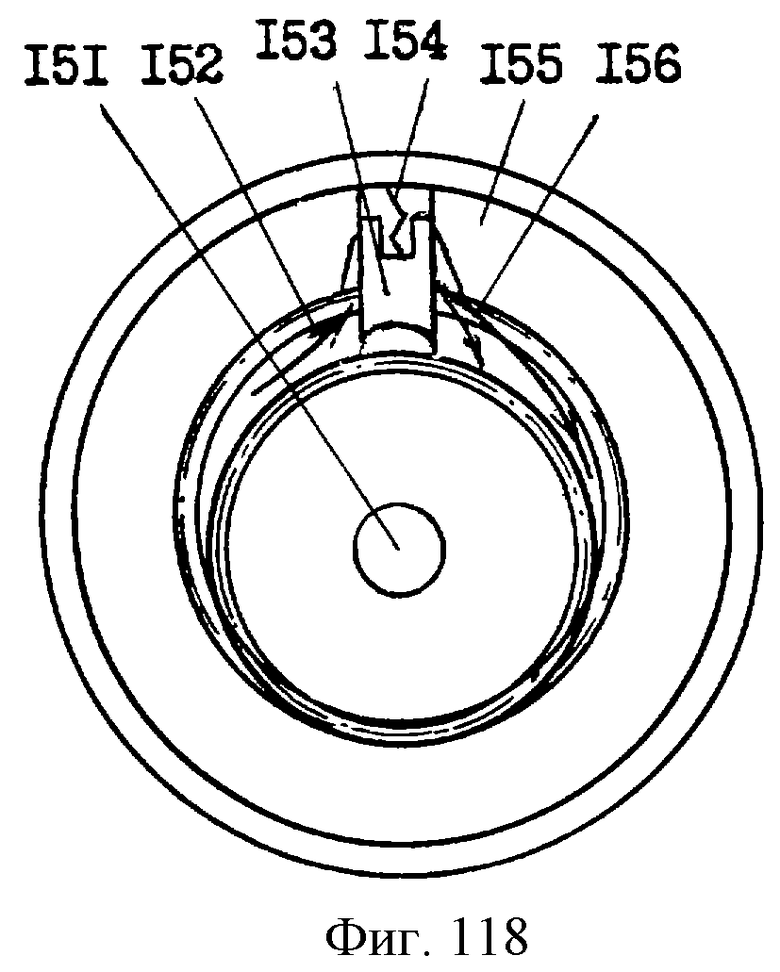
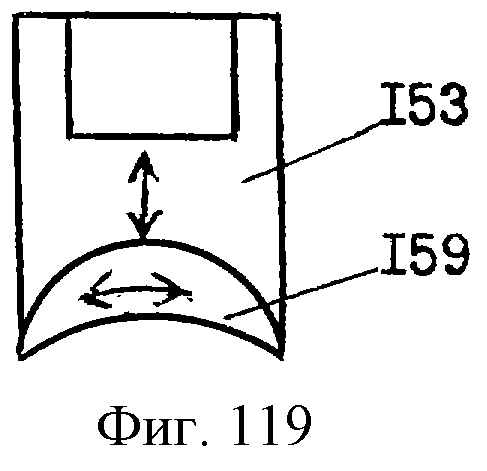
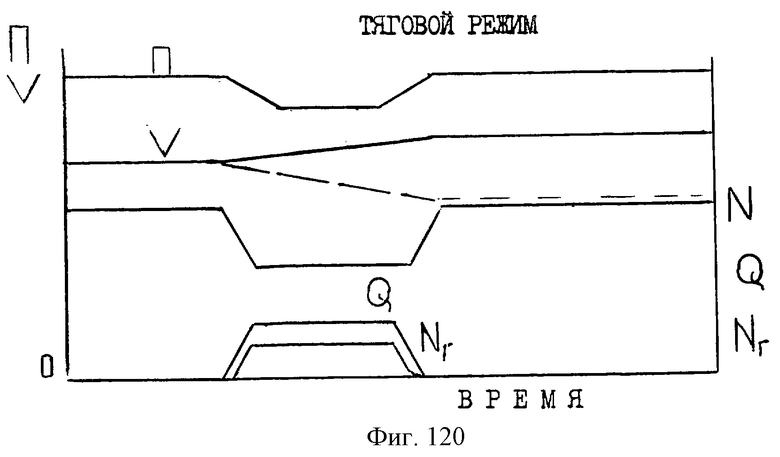
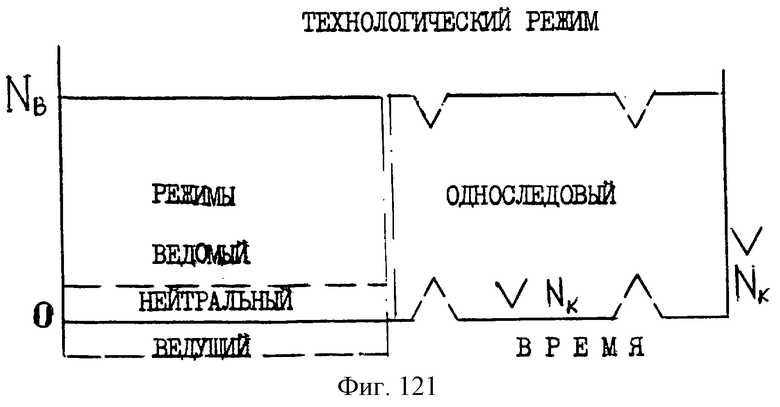
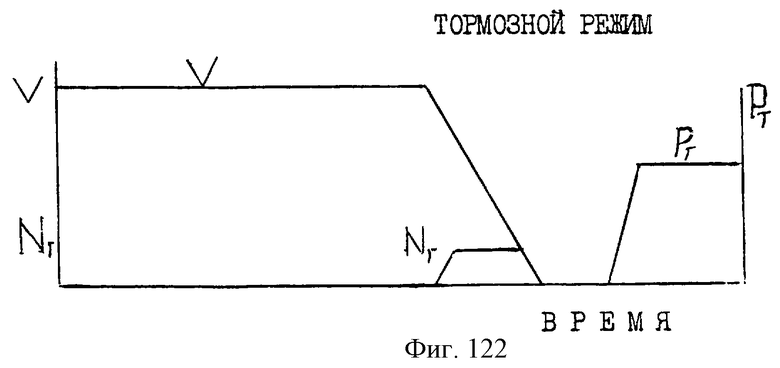
На фиг.1 изображен привод рабочих органов двух бортов; на фиг.2 - схема привода из двух рычагов одной руки на два борта; на фиг.3 - схема однорычажного привода на каждый борт; на фиг.4 - схема цепи двух штанг механического привода; на фиг.5 - схемы рабочих органов, вид сверху; на фиг.6 - схема секции рабочих органов, вид сбоку; на фиг.7 - схемы отвала на оси поворота; на фиг.8 - схема поворота отвала; на фиг.9 - схема лемешного рабочего органа с реверсивным отвалом-роликом; на фиг.10 - схема работы секций, вид сверху; на фиг.11 - схема работы плуга с роликом и самоповоротным катком в ведущем режиме; на фиг.12 - схема плужно-бульдозерного рабочего органа с указанием режимов и хода l; на фиг.13 - схема образования насыпи с одной стороны; на фиг.14 - схема образования насыпи с 2 сторон с предварительной плужной обработкой; на фиг.15 - схема образования траншеи, выемки; на фиг.16 - схема самоповоротной в двух плоскостях секции рабочих органов с предохранителем от перегрузки; на фиг.17 - схема коробчатой секции рабочих органов; на фиг.18 - схема соединения плужного корпуса с коробчатой секцией; на фиг.19 - схема соединения штанг с возможностью сложения при транспортировке, на фиг.20 А и Б - схемы самоустанавливающихся колес-регуляторов глубины почвообработки; на фиг.21 - схема резания шины на части при ее утилизации; на фиг.22 - схема сборки колеса из частей шины с сердечниками; на фиг.23 - схема сборки колеса из бортов негодной шины; на фиг.24 - схема сборки колеса из плоского каркаса; на фиг.25 - схема варианта колеса с щипами; на фиг.26 - схема сборки колеса из плоских частей шины на глубоком ободе; на фиг.27 - схема оборки полушин; на фиг.28 - схема колеса из полушин с канавкой в средней части; на фиг. 29 - схема варианта сборки полушин; на фиг.30 - схема роликового отвала; на фиг.31 - схема колеса с лопатками; на фиг.32 - схема катка; на фиг.33 - схема лущильника из полушин; на фиг.34 - схема ротобороны с зубьями; на фиг.35 - схема накладок тормозов и горшков для водоподачи; на фиг.36 - схема легкой бороны - полушины; на фиг.37 - секция рабочих органов, вид сверху; на фиг.38 - секция, вид сбоку; на фиг.39 - трапециевидный рабочий орган; фиг.40 - то же, с ограничителями; на фиг.41 - положения рабочего органа; на фиг.42 - рабочий орган с роликом; на фиг.43 - работы; на фиг.44 - схема работы; на фиг.45 - рабочий орган с роликом; на фиг.46 - рабочий орган о двумя роликами; на фиг.47 - рабочее положение; на фиг.48 - рабочее положение; на фиг. 49 - рабочий орган без крыла; на фиг.50 - то же, с крылом; на фиг. 51 - то же, вид сбоку; на фиг.52 - рабочий орган с роликом и крылом; на фиг. 53 - то же, вид сверху; на фиг.54 - рабочий орган с наклоном оси; на фиг. 55 - рабочий орган с указанием наклона, сил Рс, скоростей Vс, Vр; на фиг. 56 - то же, с роликом; на фиг.57 - то же, с отвалами, вид сверху; на фиг. 58 - то же, с роликом, вид сверху; на фиг.59 - секция многоцелевая; на фиг. 60 - однодисковый рабочий орган; на фиг.61 - рыхлитель; на фиг.62 - окучник; на фиг. 63 - то же, с прутками; на фиг.64 - то же, с роликом; на фиг.65 - то же, с лапой; на фиг.66 - грабли; на фиг.67 - оси поворота дисков и катков; на фиг.68 - лапа; на фиг.69 - рыхлитель; на фиг.70 - то же, спереди; на фиг.71 - то же, сбоку; на фиг.72 - поворотная лапа; на фиг.73 - поворотная лапа; на фиг.74 - кинжаловидная лапа; на фиг.75 - то же, с граблинами; на фиг.76 - то же, с сеткой; на фиг.77 - то же, с прутиками; на фиг.73 - то же, с граблиной; на фиг.79 - рабочий орган; на фиг.80 - диск почворуля; на фиг.81 - бороздорез; на фиг.82 - вид сверху диска; на фиг.83 - вид сверху почворуля; на фиг.84 - вид сверху окучника; на фиг.85 - диск; на фиг.86 - то же, сбоку; на фиг.87 - секция дисков; на фиг.88 - диск с крылом; на фиг.89 - диск-движитель; на фиг. 90 - агрегат с дисками устойчивости; на фиг.91 - сошник; на фиг.92 - сошник сверху; на фиг.93 - диск-якорь; на фиг.94 - диск-лапа; на фиг. 95 - диск-лапа; на фиг.96 - лапа с прутиками; на фиг.97 - диск-резец; на фиг.98 - дискосекция; на фиг.99 - работа дискосекции; на фиг. 100 - секция ходового якоря; на фиг.101 - установка дискосекции; на фиг.102 - соединение дискосекции; на фиг.103 - бульдозер; на фиг.104 - работа бульдозера; на фиг. 105 - оборотный плуг-лущильник-борона; на фиг.106 - схема комбинированного агрегата для выполнения нескольких функций; на фиг.107 - схема агрегата для копирования и прокладки борозды на ровной поверхности при перемещении рабочих органов одной рейкой; на фиг.108 - схема сочетания тормозных и ведущих рабочих органов с дисками устойчивости против опрокидывания; на фиг.109 - оборотное орудие; на фиг.110 - схема изменения ширины; на фиг.111 - многорежимная секция; на фиг.112 - изменения функций и толкающей силы РТ; на фиг.113 - изменение режимов отвала-лопаты; на фиг.114 - схема привода тягача и прицепа путем совмещения энергопотоков; на фиг.115 - схема привода энергмодуля и многоцелевой машины; на фиг.116 - схема гидромашины; на фиг. 117 - схема эксцентрикового вала; на фиг.118 - схема работы гидромашины многоцелевого типа; на фиг.119 - схема замыкателя с плавающим вкладышем; на фиг.120 - схема изменения частоты П вращения выхода, скорости V, мощности, подачи и расхода Q, мощности гидропотока в тяговом режиме; на фиг. 121 - схема изменения режимов, скорости и мощности при выполнении технологических процессов обработки земли; на фиг.122 - схема изменения скорости, мощности гидропотока и силы торможения соответственно V, N, PT.
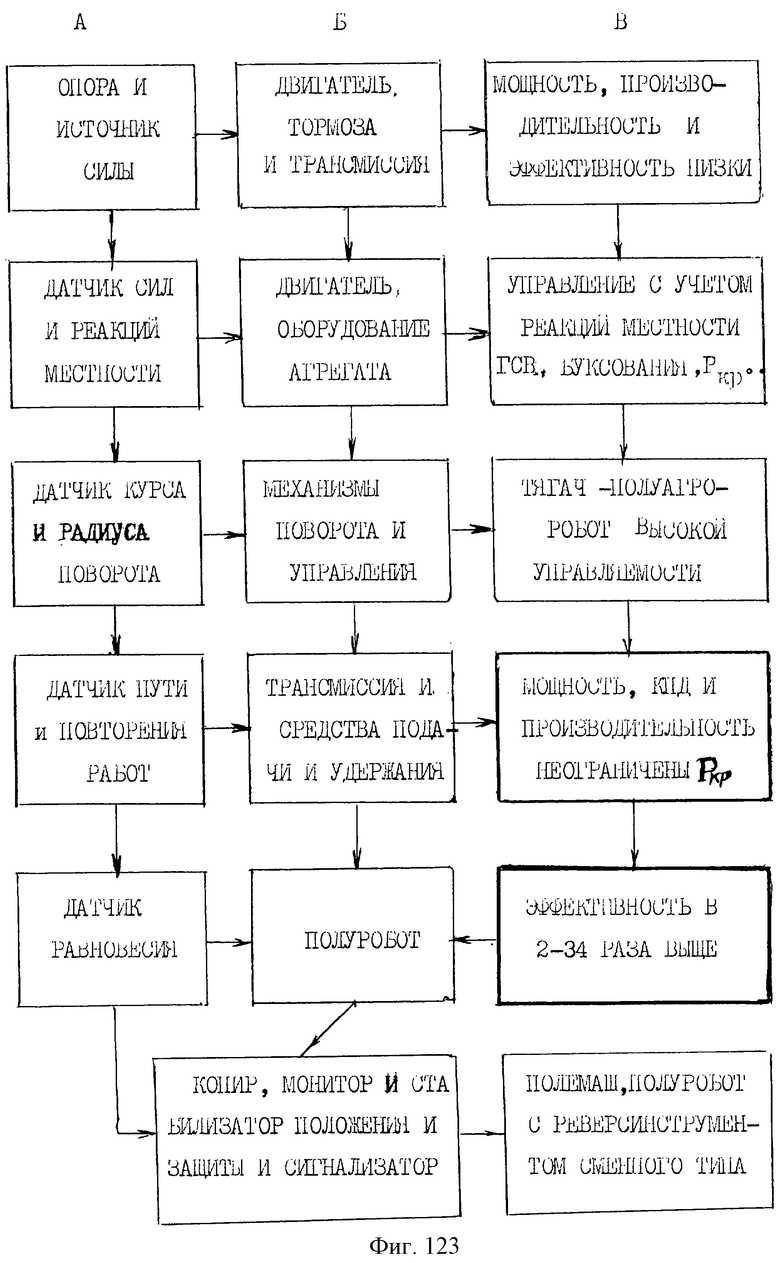
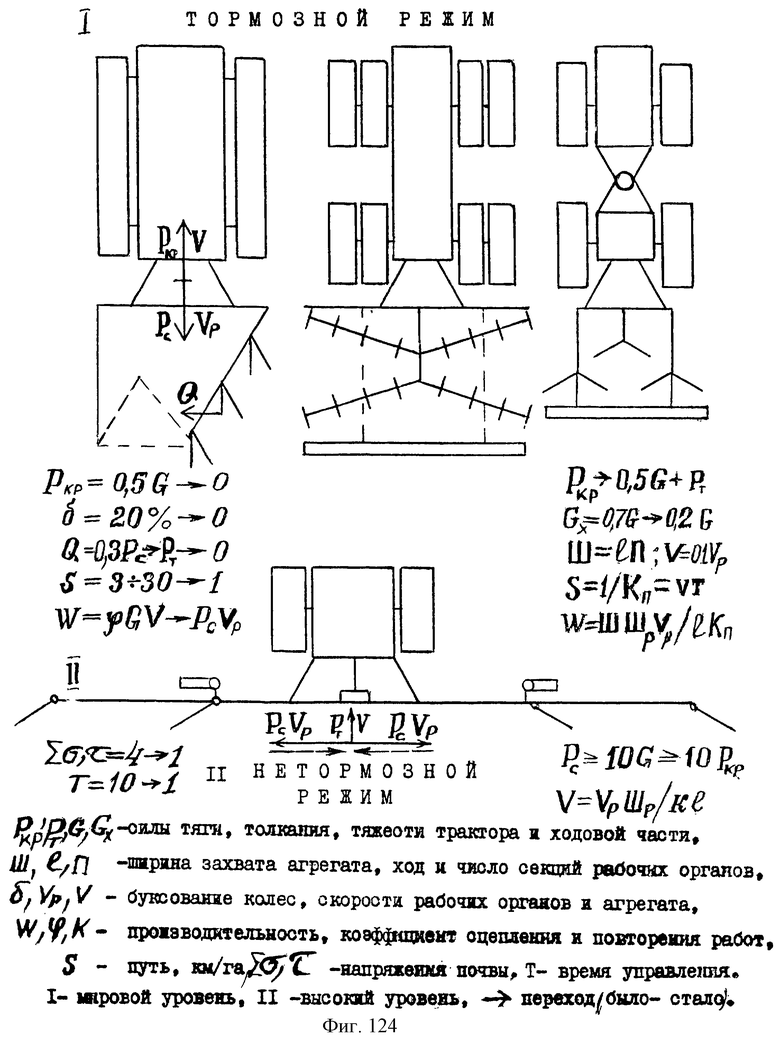
На фиг.123 показано преобразование функций колес по мере снижения тяговой нагрузки и повышения уровня замещения функций человека техническими средствами механизации и роботизации земледелия и других отраслей обработки земли; на фиг. 124 показано преобразование основных показателей работы, эксплуатационных качеств, экологических свойств и массодинамических значений при переходе от тормозных рабочих органов и орудий к нетормозным реверсивным, оборотным рабочим органам и многофункциональной машине - заменителю системы машин.
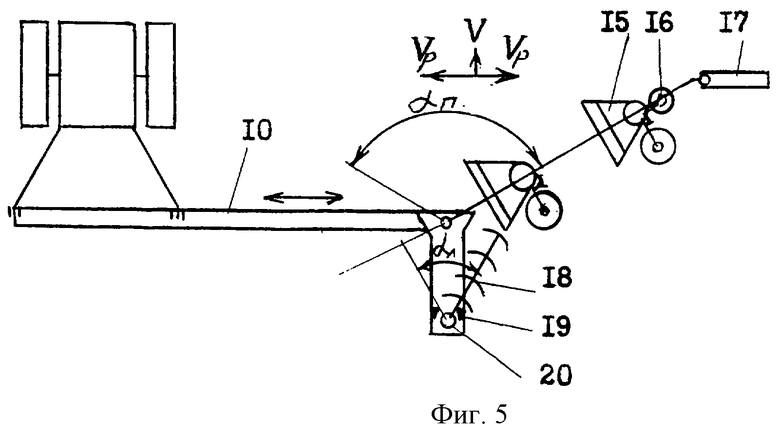
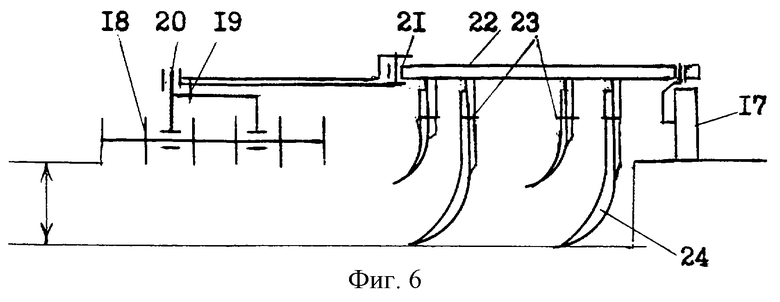
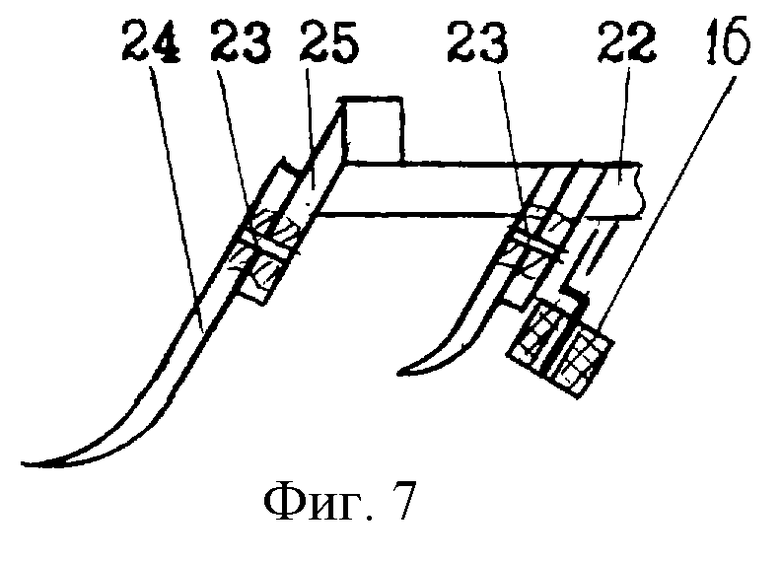
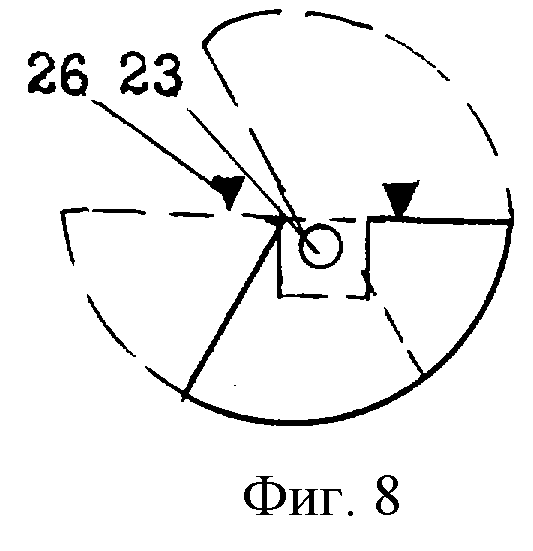
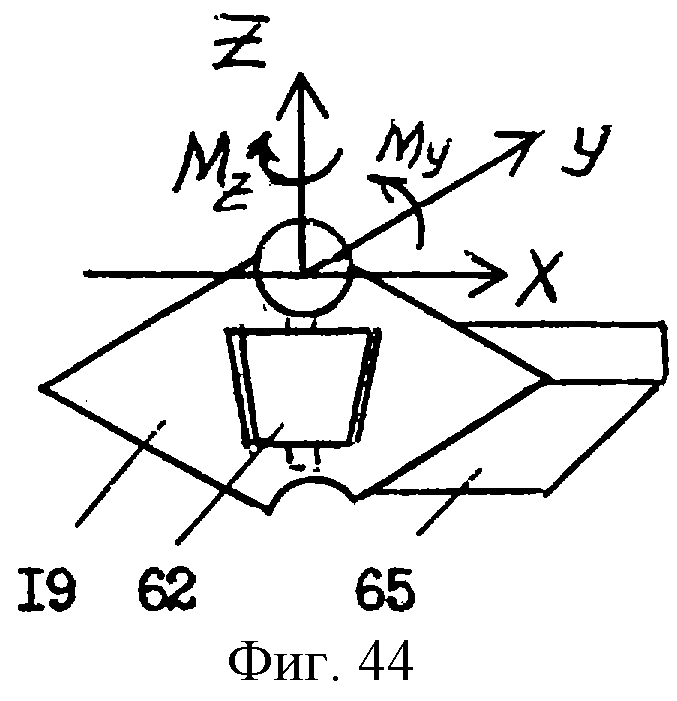
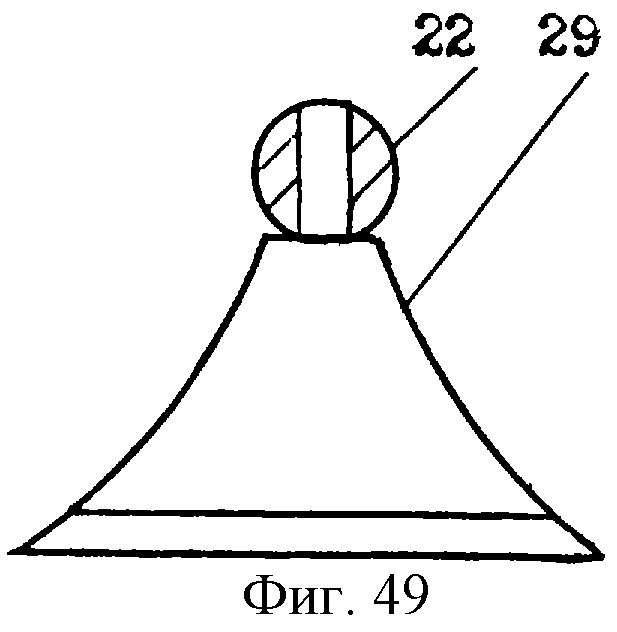
Привод от гидроцилиндра 1 или цепи шарнирных рычагов 2, 3, 4, 5, 6, образующих реверсивный привод рабочих органов, имеет колеса 7 (фиг.1). Механическая рука (фиг.2) из рычагов и цепной передачи 8 на два борта выполнена в двух плоскостях с возможностью поворота в обе стороны от нейтрального положения. Два рычага (фиг.3, 4) связаны рычагами 9 для прямолинейного хода рабочих органов. Привод от цепи 10 (фиг.4) и штанг 11, 12 с осями 13 и направляющими роликами 14 имеет малую длину. Одноосное энергосредство с приводом (фиг.5) штанг и поворотной на угол α, плужного корпуса 15 с роликом 16, колесом 17, дисковой батареей 18, самоповорачиваемой на угол α между ограничителями 19 может пахать и лущить почву за один проход. Второй вариант выполнения машины имеет секцию дисков, ось 21 секции 22 рабочих органов для вспашки на осях 23 поворотных отвалов 24 для вспашки на глубину h (фиг.6) в сочетании с лущением или каткованием на оси 23. Отвал 24 (фиг.7, 8) может поворачиваться относительно стойки 25 между ограничителями 26. Роликовый рабочий орган на оси 23, поворотный рычаг 27 ролика 28 установлены с возможностью самоперестановки между ограничителями лемешного корпуса 29 для вспашки, лущения, или каток 30 и батарея поворачиваются на αп, αк (фиг.10, 11) под действием сопротивления и совершают поочередно поворотное и поступательное движение в обе стороны. Плужный 22 и бульдозерный 31 рабочие органы могут перемещаться в ведущем, нейтральном и тормозном режимах (фиг.12) и совершать рабочий ход к энергосредcтву 32 при формировании насыпи с одной стороны или в обе стороны (фиг.14) с возможностью уравновешивания сопротивлений при образовании канала, траншеи и других сооружений. Рабочие органы на поворотной секции 22 (фиг. 16) имеют фиксатор 33 поворотного шарнира 34 для предохранения от поломки путем поворота. Фиксаторы 33 связи секции рабочих органов со штангой допускают остановку рабочих органов при возвратном ходе штанги 12 (фиг. 17). Несколько штанг 12 и секций рабочих органов можно соединить шарнирами и фиксаторами и установить на колесах (фиг.20) - регуляторах глубины обработки земли с винтами-регуляторами высоты секций 35 и рабочих органов на стойках 35, 36. Винтами 37, балансиром 39 и осью 40 самоустанавливающихся колес можно перевести рабочие орган в транспортное положение. Для транспортировки возможен и поворот секций после удаления фиксатора 33 до попадания в отверстие в повернутом положении.
Для изготовления резиновых и прорезиненных рабочих органов и колес высокой грузоподъемности из шин-утиля негодную шину режут на боковину с сердечником или без него 41, 42, каркасную ленту 43, надевают их на обод 44, закрепляют кольцом или другими известными способами. На фиг.23, 24 колеса большой грузоподъемности или катки собраны из частей шины 42, 43 на ободе 44, на фиг.25 - снабжено шипами. Плоская лента каркаса 43 на глубоком ободе 44 (фиг.26), эластичная шина из боковин 42 на ободе 44 (фиг.27, 28, 29) составляет колеса высокой грузоподъемности. Части шины 47 на оси 48 составляют роликовый отвал для оборота пласта (фиг.30). Почвозацепами 49 и лентой шины можно камерную шину сделать высокопроходимой. Из боковин 41, 42 на ободе 50 и частей 51, 52 шин на ободе 44 можно собрать рабочие органы для лущения, сошники для посева (фиг.32, 33) и боронования с зубьями 53 (фиг.34). Части шины присоединены к тормозной ленте 54 или колодке, составляют черпак 55 и прокладки 56 для установки между листами рессор, лопаток турбин или наполнителей бетона, опор, упоров, ограничителей хода штанг и рабочих органов. Боковина шины 42 (фиг.36) с зубьями 57 или без них могут работать в качестве легкой бороны.
При монтаже колес и рабочих органов из негодных шин части шин надевают на обод, прижимают и закрепляют известными методами. Несколько чашеобразных колец образуют многослойную бескамерную шину для работы в суровых условиях. Они не боятся проколов, порезов, присоединяются даже гвоздями. Их увод ниже камерных шин.
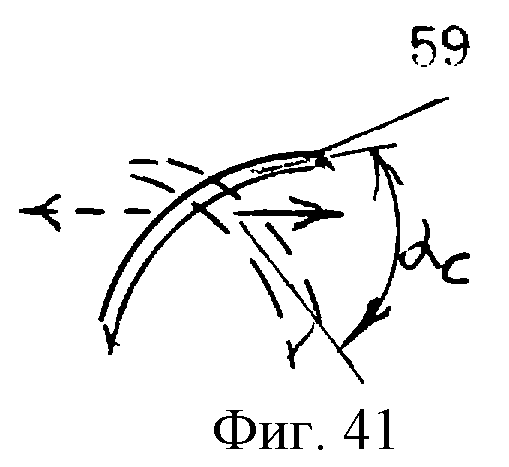
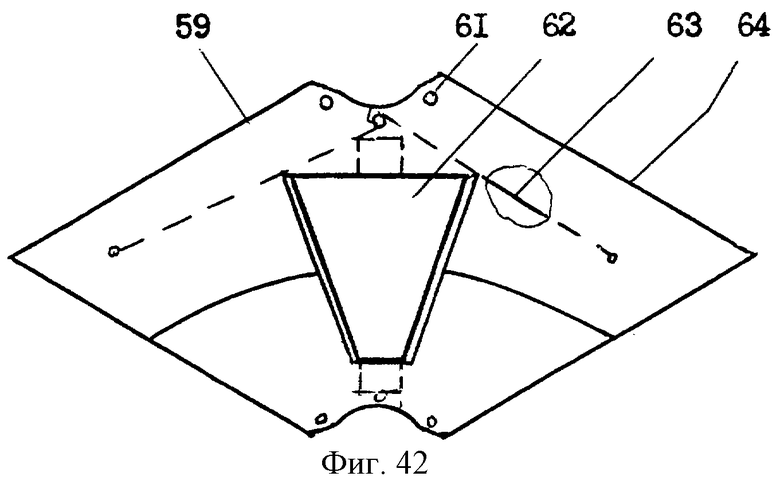
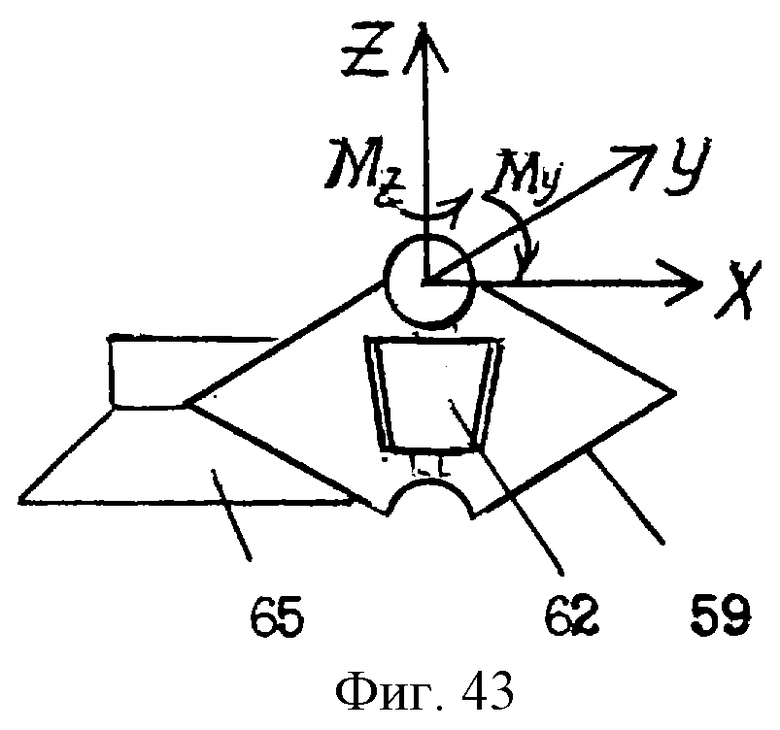
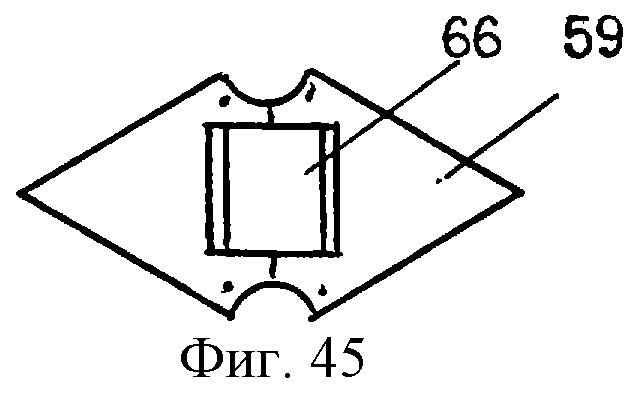
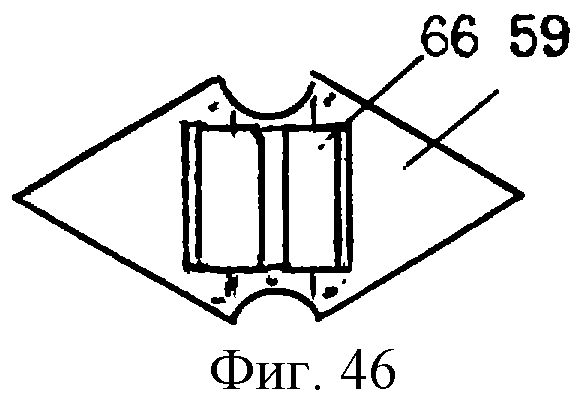
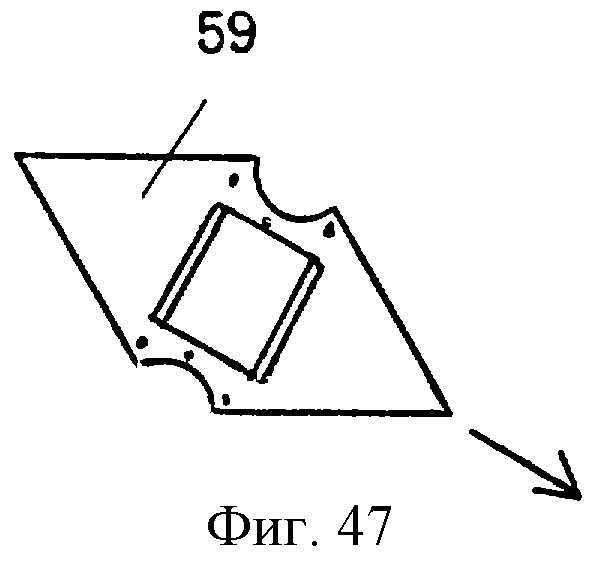
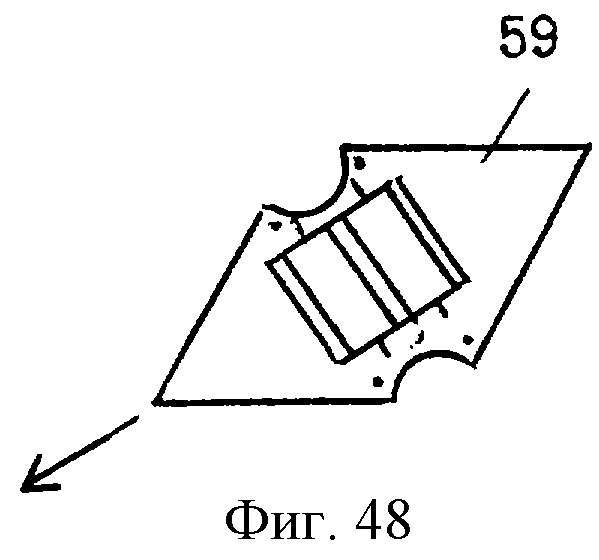
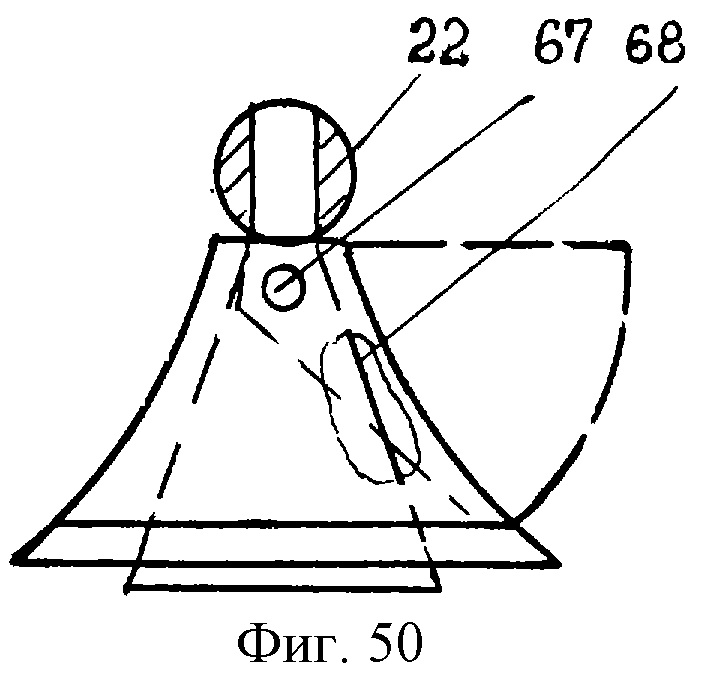
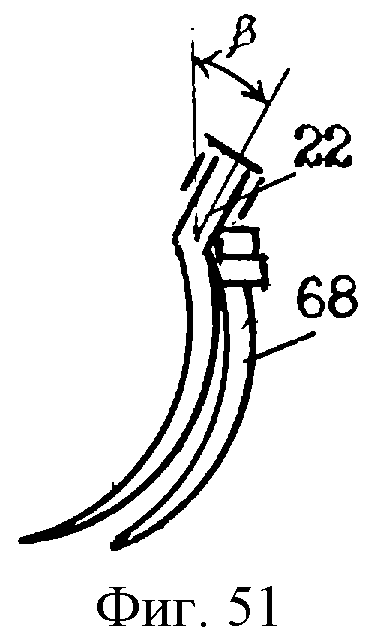
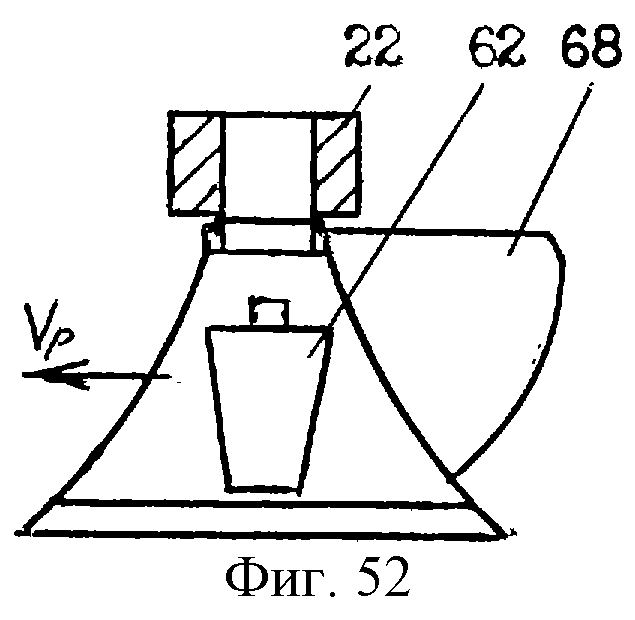
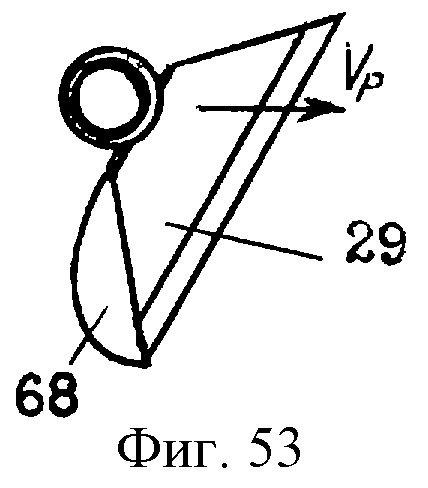
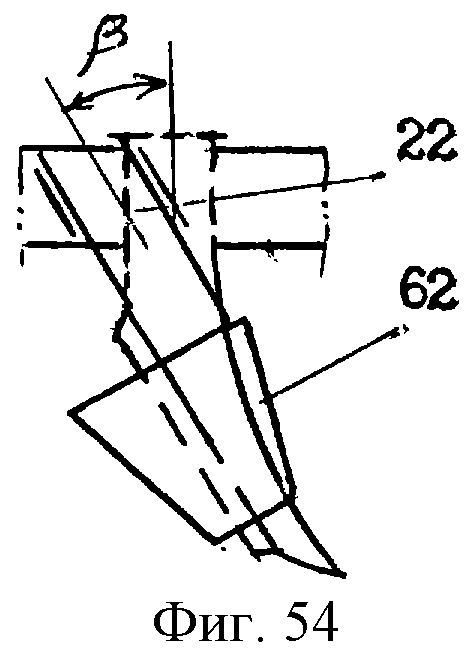
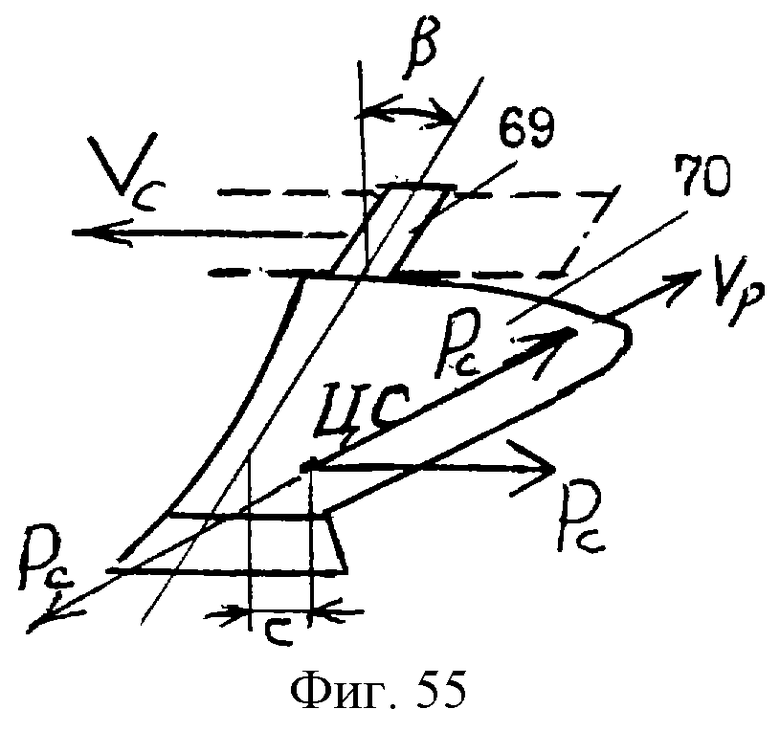
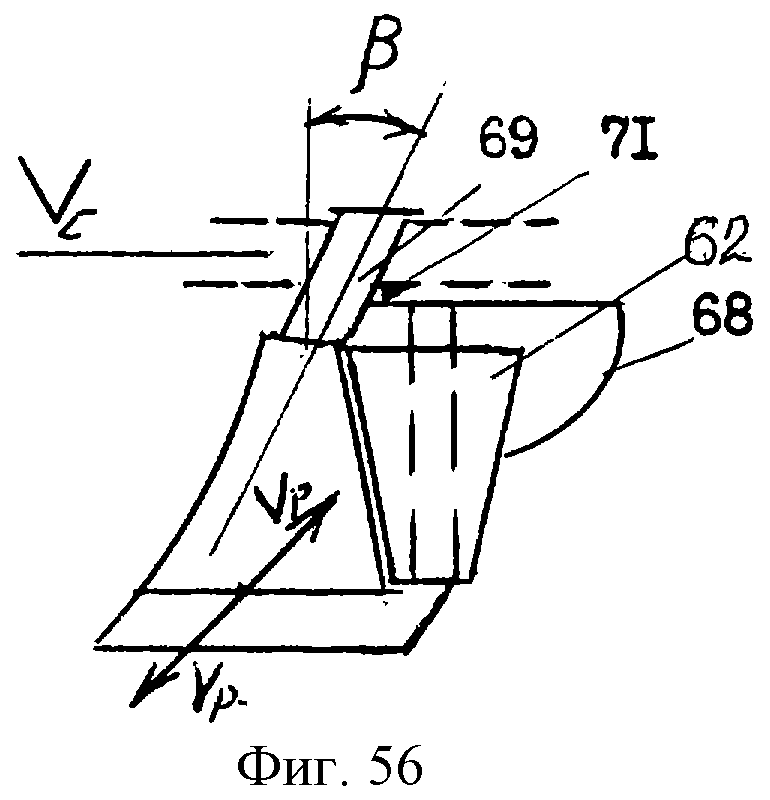
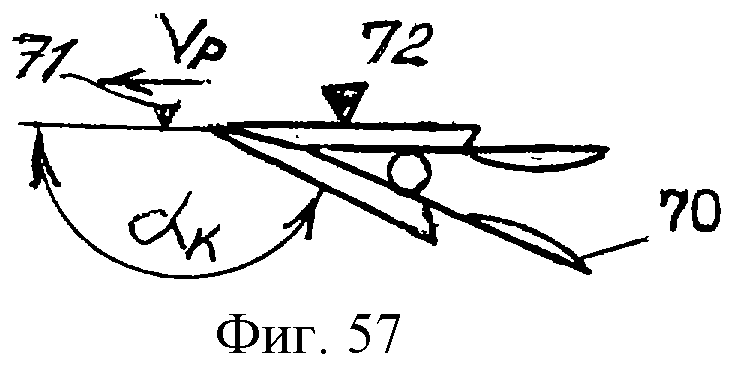
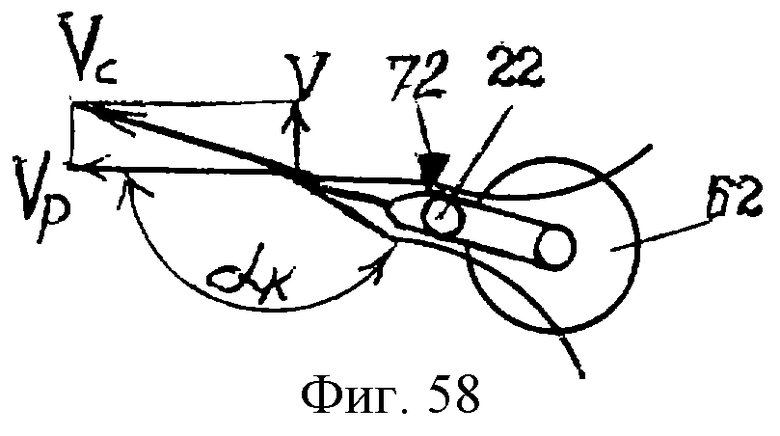
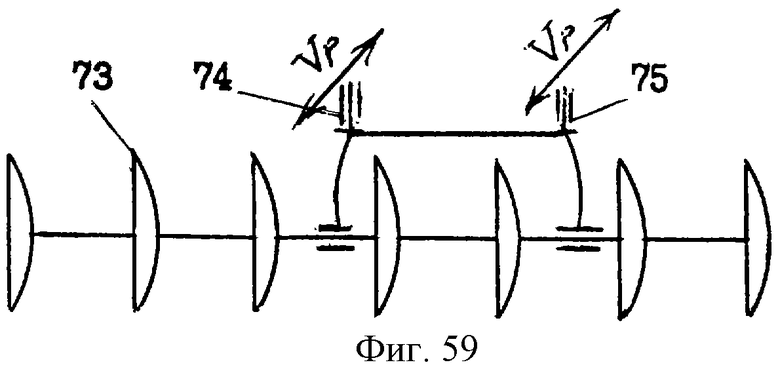
Система рабочих органов, их секций и элементов (фиг.37-104) включает лемешно-отвальный рабочий орган 58, 59 на осях 33, 34 поворота между ограничителями 60, места 62 для крепления с роликом 63, лезвием 64 для резания (нарезки) поперечных борозд 65 (фиг.43, 44) с роликом или роликами 66. Трапециевидная рабочая поверхность 29 с осью 67 и крылом 68 (фиг.50, 51). Вокруг вертикальной оси 22 поворот крыла 68 между ограничителями осуществляется сопротивлением почвы. Вертикальная ось 22, 69 может быть наклонена на угол β для самоповорота отвалов 70 силой Рс при плече С (фиг.54-56), между ограничителями 71, 72 на угол αк при перемещении и подаче вперед со скоростью V. Дисковая секция 73 на оси 74 поворота в режиме лущильника и осью 75 поворота при работе в режиме окучника. Сферодиск 76 поворота в режиме окучника-бороздореза, шарнир 77 рыхлителя 78, окучник 79 без прутков и с прутками 80, 81, с роликом 82, плоскорезом 83, лапой 84 могут самоповорачиваться между ограничителями. Граблина 85 на осях 86, 87 поворота дисков или катков 88, стойка 89 с лапой 90, шарниры 91, ограничители 92 рыхлителей 93 без и с лапой 94, плоскорез 95 или стойка 96 кинжалообразной формы с лапой 97, граблины 98 ножа 29 (сетка, прутики), граблины 100 на оси 101 для уборки корнеплодов могут самоустанавливаться по ходу и выполнять свои функции и повторять их многократно.
Рабочий орган 102 с диском 103 (фиг.79-83) может поворачиваться сопротивлением и рулем 104, диск 105 и 106 могут управлять курсом. Сферодиски 106 - окучники - могут нарезать бороздки и окучивать. Диски 107 (фиг.85-89) могут быть с крылом 108 и без него, а диск 109 может обрабатывать земли и работать в качестве движителя в зависимости от соотношения скоростей движения и перемещения. Балансир 110 с дисками (фиг.90) 111 предотвращают опрокидывание. Дисковые рабочие органы - сошники 112, 113, диск 114 почворуля и почвотормоза могут работать в тормозном и нетормозном режимах.
Копатели 115, 116 на общей или автономной оси 117, диски 118 рабочего органа с прутиками 119 (фиг.94-96) могут поворачиваться между ограничителями. Диски 120 для резания земли, перемещения могут работать в ведущем режиме и заменить лопату бульдозера и грейдера (фиг.97-99) или ходового якоря (фиг.100) - секции 121 при формировании траектории.
Батарея 122 (фиг.101, 102) имеет шарниры 123 и ограничители 124 поворота под действием сопротивления Рс при перемещении на угол αN. Ограничители 126 поворота лопаты 127 при рабочем Vp, и холостом Vx ходах и подаче вперед V (фиг. 103, 104) приводом 128 и ограничитель 129 определяют положение и формируют целевое состояние земли при выполнении функций и их повторении.
Секция тормозных рабочих органов 59 (фиг.105) имеет гидропривод 130 для поворота вокруг оси 131 и работы в качестве обратимого орудия для ровной обработки земли.
Сочетанием рабочих органов 15, 19, 18, 19 суммируются функции и повышается скорость движения пропорционально числу рабочих органов. Это возможно и перемещением рабочих органов 132 рейкой и вождением по борозде 134, уравновешиванием диском 135 и следопрокладчиком 136 для следа 134 для последующего вождения (фиг. 107). Комбинированием нетормозных и тормозных рабочих органов (фиг.108) также возможно вождение копированием следа. Здесь дисковые рабочие органы 59, 73 уравновешивают боковую силу, помогают дискам 111 и колесам удержать агрегат при перемещении рабочих органов и дистанционной работе.
Функции рабочих органов можно изменять поворотом. При этом изменяется ширина захвата Шр, сопротивление и воздействие на почву. Изменение функций, ширины (фиг.109-113), режима работы (ведущий, нетормозной и тормозной с переходом через нейтральный) определяют углом α, как это показано, для различных типов рабочих органов.
Гидромашина 137 (фиг.114) питания усилителя руля 138 с распределителями 139 и гидромашинами 140 привода колес и распределители 141 управления гидромашинами 142 привода колес прицепа с гидроподъемником 143 составляют транспортный агрегат, а с распределителем 144 в линиях 145, переключатели 146 золотника 147 в линии гидропривода 148 звездочки и реек 149 с конечными упорами 150 составляют технологический агрегат.
Гидромашина 137, 140, 148 обратима и содержит вал 151 (фиг.116-119), на кривошипе которого установлена шестерня 152, замыкатель 153, пружину 154, в корпусе 155 - каналы 156 питания. Зазор 157 и полость 158 обеспечивают гидроподжим шестерни-поршня, в рабочих полостях около которой протекают процессы насоса, тормоза, мотора, муфты, делителя потока энергии, регулятора скорости, гидросинхронизатора с возможностью изменения режима. Вкладыш 159 установлен с возможностью поворота и перемещения для разобщения линий входа и выхода рабочей жидкости.
Самоподжим деталей - самоуплотнение по всему периметру рабочего объема повышает объемный КПД при низкой точности изготовления деталей и повышает эффективность преобразования и передачи энергии в обе стороны с возможностью компенсации износа при регулировании скорости, торможении и преобразовании давления в крутящий момент и наоборот в зависимости от заданного режима. В режиме гидростартера насос-муфта преобразуется в гидромотор в линии питания подвески (на схеме не показано).
Объемная муфта может плавно регулировать скорость на выходе и синхронизировать скорости соединяемых деталей коробки передач, обеспечить эффект гидропривода - плавного снижения скорости ведущего звена и повышения скорости ведомого звена путем передачи энергии гидролинией, переключить механический поток на гидравлический и без разрыва потока мощности переключить скорость, после чего гидропоток прерывается и потери энергии снижаются.
Отвал рабочего органа плуга имеет угол рабочего поворота между ограничителями при нормальной нагрузке и перемещении в обе стороны. За пределами такого поворота рабочий орган или секция поворачиваются при перегрузке до выглубления. Такой аварийный поворот осуществляется за счет выхода фиксатора или деформации ограничителя или среза штифта. После изменения знака сопротивления, т. е. обратном ходе, рабочие органы возвращаются в зону рабочего поворота и вступают в действие, оставив некоторый огрех около камня, пня или иного препятствия. Это облегчает поиск опасного участка и предохраняет машину от перегрузки и поломки. Можно использовать пружину и силу тяжести для ввода рабочего органа в действие и входа фиксатора в отверстие для удержания в реверсивном рабочем положении. Рабочая и аварийная зоны поворота отвала, рабочих органов и их секций могут иметь общую зону и ось (рабочего, затем аварийного поворота) или аварийный поворот возможен вокруг другой оси. В каждом случае реверсивность хода при работе, аварийный поворот и возврат, остановка при перегрузке предохранительной муфтой или клапаном защиты гидропривода защищают машину от поломки. В транспортном положении рабочие органы или секции фиксируются штифтом или подъемником. На штанге или брусе рабочие органы установлены с возможностью остановки и изменения хода, перестановки ограничителей, регулирования ширины захвата в пределах длины хода рабочих органов.
Изменение длины хода, дистанции и ширины захвата возможны с одной и двух сторон. Отвал, лемех, лапа, нож и др. рабочие органы имеют лезвия с двух сторон и установлены с возможностью перемещения в трех режимах (ведущем, тормозном и нейтральном) с точки зрения привода сопротивления к колесам энергосредства. В каждом режиме возможны самозахват, самозагрузка и саморазгрузка, самоуравновешивание в противофазе, самоочистка в конце каждого хода, самоподача вперед, самоповорот, самозащита при перегрузке, самооборотность в реверсивном режиме. При встрече с препятствием на поле контур зоны опасности (веревка) действует на орган остановки агрегата.
При перемещении многорежимных рабочих органов, отвалов плуга и бульдозера и их секций относительно энергосредства выполняются функции рабочих органов (вспашка, лущение, уплотнение, рыхление, культурно-технические и другие работы) до конца хода в одну сторону, после чего поворачиваются, самопереставляются и самоустанавливаются по ходу, подаются вперед и перемещаются в обратном направлении и повторяют работу. Пласт оборачивают отвалом, роликом или дисковой батареей доканчивают оборот. Каток крошит комки, уплотняет и выравнивает почву. Все операции в ведущем режиме выполняются так, что часть сопротивления рабочего органа преобразуется в движущую силу. При перемещении рабочих органов в обе стороны в противофазе поперечные составляющие сопротивлений уравновешиваются, а продольные создают толкающую силу и разгружают колеса энергосредства.
Опорные колеса, дисковые и катковые батареи ограничивают глубину почвообработки, преобразуют (воспринимают) силу тяжести плуга или другой машины в технологическую силу и исключают необходимость в балласте. Катки, колеса, дисковые батареи, плуги, бульдозеры и др. рабочие органы или их секции перемещаются пропорционально ширине захвата, поворачиваются под действием сопротивления земли в обе стороны, создают движущую силу в ведущем режиме, тормозную силу в тормозном режиме и нулевую продольную силу в нейтральном режиме, выглубляются при перегрузке, самоочищаются в период ревреса. В каждом крайнем положении силу поперечного перемещения можно преобразовать в силу подачи вперед, например, путем растормаживания или непрерывно в период поперечного хода тормозить при односледовой работе или использовать толкающую силу для медленного движения агрегата вперед со скоростью, определяемой кратностью повторения работ: при малой скорости и перекрытии ходов работы повторяются без дополнительных рабочих органов и проходов агрегата по полю. Избыток движущей силы снижают до нуля установкой ролика-копира стенки борозды на тыльной стороне плужного корпуса или секции.
Опорами-регуляторами глубины обработки земли могут быть колеса и катки, диски, сошники и боронки для обработки почвы и передачи силы веса почве при выполнении полезной работы. Для изменения глубины почвообработки переставляют по высоте, например, рычагом или тягами с отверстиями (не показаны). В транспортное положение рабочие органы переводятся известными способами.
Совмещение операций вспашки и перемещения земли плугом и лопатой бульдозера облегчает резание и перемещение земли при формировании дорожного полотна, дамб, каналов, траншей и др. сооружений. Заполнение и выемка материалов из силосной ямы, транспорта или перемещение других материалов требует чередования рабочего и холостого ходов и регулирования ограничителей дистанционного хода и поворота рабочих органов.
Плужно-бульдозерная секция повышает производительность и эффективность, допускает работу в ведущем, нейтральном и тормозном режимах перемещения материала в одну или две стороны с возможностью бесконечного повторения операций с малой подачей вперед или сверху вниз без множества проходов и буксования трактора. При резании материала сверху вниз лопата имеет шарнир и ограничители поворота для рабочего и холостого хода. При подаче вперед и резании материала торцевой частью поворот лопаты вокруг вертикального шарнира облегчает перемещение материала в нужном направлении при реверсивном перемещении относительно трактора. Такая работа характерна для строительства и очистки дорог и других сооружений. Возможно сочетание подачи вперед и вниз.
Лопата бульдозера имеет ось поворота между ограничителями под действием сопротивления почвы. В сопротивляющейся среде нагрузка автоматически регулируется путем преобразования сопротивления в подъемную силу, силового регулирования и выглубления при перегрузке. Для этого подъемник и привод или гидролинии соединены (сообщены).
Бульдозерная лопата или ее крыло поворачивается между ограничителями под действием сопротивления земли и при перемещении преобразует сопротивление в движущую силу, а при автоматическом силовом регулировании и с подъемником с возможностью выглубления при перегрузке. Бульдозерная лопата режет землю намного хуже плуга. Поэтому резание и крошение почвы и грунта плугом при холостом ходе бульдозера формирует новый способ сочетания работ и совмещения операций при формировании целевого состояния земли. Это заменяет ходостой ход бульдозера рабочим ходом плуга или иного рыхлителя, удваивает производительность и стабилизирует нагрузку. Аналогичное совмещение процессов и формирование целевого состояния при очистке строительстве террас, дороги, дамб, а также уборке клубней, кормов. Снижения скорости движения и повышение кратности повторения операции снижает производительность по площади, увеличивает по объему перемещаемой земли. Эффективность повышается сочетанием площади и кратности. Полоски различной кратности обработки (от нуля до максимума) получаются и изменением шага установки секций рабочих органов.
При формировании ровной поверхности выгодно катки, колеса, бороны, лущильники смести от плуга назад на ширину поперечного захвата. В этом случае направление до оборота пласта удачно совпадает с направлением работы плуга, а также каждая операция дает движущую силу, колесо плуга может быть заменено катками и лущильниками и сила тяжести передается почве для дообработки ее без балласта, как это принято в тормозном режиме.
Два ножа в виде кинжалов с общей осью поворота на стойке создают стрелу для реверсивной работы. Лезвия с двух сторон и поворот стойки также формирует реверсивную лапу. Две такие лапы формируют стреловидную лапу реверсивного типа. При этом самоповорот между ограничителями и возможность изменения ограничителем ширины полезны.
Шины или их части используют в качестве катков, роликов, комкодавителей, борон, бандажа колес высокой грузоподъемности. Резиновые и прорезиненные эластичные поверхности имеют большое трение, затрудняют резание и скольжение, снижают распыление, облегчают крошение, изгиб, излом, уплотнение и структура образование при малой материалоемкости и стоимости машин. Применение катков и чашеобразных рабочих органов без балласта решает проблему утилизации шин. Резиновое и прорезиненное кольца уплотняют и боронуют почву. Из негодной шины или ее частей собирают катки, колеса, ролики, бороны и колеса, которые не боятся проколов и порезов, опасностей дороги, имеют малую шинную неуправляемость. Это повышает устойчивость курса и положения на склонах при работе в режиме робота. Высокая грузоподъемность бескамерной шины из утиля многократно снижает число и размеры колес, а также стоимость колес.
На гололеде шинная лента с шипами повышает проходимость и управляемость, снижает увод машины боковой силой. Шины из утиля не боятся порезов и проколов, облегчают работу и обслуживание машины.
Части негодной шины присоединяют к тормозным колодкам и лентам и используют в муфтах в качестве фрикционных накладок. Высокий коэффициент трения резины по металлу и земле полезно для муфт, тормозов с качествами амортизации, прокладок между листами рессор. Рессоры с листами из металла и резины имеют высокое сопротивление трению, лучше смягчают удары и сглаживают колебания, гасят их, совмещают функции рессор, амортизаторов, повышают плавность хода и независимость от нагрузки.
Куски шин - отличный скребок для транспортера, роликов отвала, лопатка турбины, черпак для поилок скота.
Снижение деформации шины из утиля полезно для повышения КПД и ресурса колес, снижения циркуляции паразитной мощности между колесами при движении по неровностям и неодинаковом нагружении колес.
Рабочий орган с диском или секция с дисками при перемещении выполняет динамические и технологические функции в различных режимах: якоря-движителя, подвижного якоря, почворуля, рабочего органа для вспашки, лущения, боронования, бульдозерно-грейдерного резания, стабилизатора курса и устойчивости против опрокидывания, почвотормоза, окучника, известного сошника и ножа в зависимости от настройки, положения около энергосредства и способа перемещения. Дисковые органы уравновешивают сопротивление рабочих органов и разгружают колеса, перемещают ось крена трактора и увеличивают устойчивость. Упоры с двух сторон предотвращают опрокидывание и допускают движение вперед. В транспортном положеннии диски поднимаются. Диск радиусом 30 см при боковом давлении 5 кг/см2 дает удерживающую силу 70 кН, что равно сопротивлению 10-15 корпусов плуга. Это допускает: тяжелую работу одного борта при обработке земли, строительстве дамб, выход в поле ранней весной очень легкого энергосредства, снижение нагрузки колес до нуля.
Снижение нагрузки и тяговых функций колес, зависимости управляемости, устойчивости, грузоподъемности, мобильности, плавности хода, обзорности и экономичности от места размещения машины облегчает эксплуатацию и повышает безопасность. Независимо от места расположения машины подача вперед возможна гидроцилиндрами в линии предохранительного клапана или конечным переключателем в линии гидропривода, для отвода рабочих органов от камня при перегрузке или силой конечного упора, если рабочий орган отводится от камня поворотом секции за счет упругости ограничителя. Возможны другие методы защиты.
Увеличение кратности обработки земли за один проход снижает площадь и число рабочих органов. Увеличение числа рабочих органов и проходов по полю достигается повышением скорости. Комбинирование орудий, увеличение числа рабочих органов и скорости снижает повторы.
Количество движения (произведение массы и скорости) суммы произведений операций (работ) и площади выше суммы произведений повторений работ и площади на количество движения энергосредства, следовательно, повторять работу без повторений проходов агрегата по полю или рабочих органов выгодно. Повторять работу без повторения рабочих органов можно, так как один рабочий орган, дважды действуя, заменяет два рабочих органа при поверхностной обработке. Такое повышение интенсивности возможно при любой кратности и выгодно снижает число проходов энергомодуля.
Если массу, приходящуюся на одну функцию, использовать для оценки, получим количественные и качественные характеристики функций, производительности, ширины захвата, энергозатрат, экономичности, энергонасыщенности и других свойств. Работа и количество движения
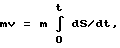
где Ш - ширина захвата, Ф - функция, S - путь, П - число функций, m - масса, V - скорость, t - время.
Закон снижения количества движения реализуется путем применения новых методов повышения ширины захвата пропорционально ходу рабочих органов, повторением в 2-4 раза, преобразованием тормозного режима в нетормозной.
Ровная вспашка или иная обработка широкой полосой без борозд или других базовых линий требует вождения по вешкам и визиру. Линия полива или борозда могут выравниваться и заново прокладываться или оставаться при изменении шага установки секций или настройкой привода. Необработанная полоса базовой линии может очищаться. Установка копира впереди и следопрокладчика сзади дает автовождение. В этих случаях боковое сопротивление диска и следопрокладчика или оборотного плуга уравновешивает сопротивление борта, снижает боковую нагрузку на колеса энергосредства и ошибку формирования траектории. Снижение нагрузки колес, масс, тяговых и тормозных сил колес до нуля при большой ширине снижает функции колес до опор.
Объемная муфта позволяет плавно регулировать скорость на выходе до нуля, что облегчает включение и переключение скоростей, и отказаться от гидравлического потока и потерь энергии после этого. При увеличении скорости используется резерв скорости двигателя. В противном случае такой переход не нужен. Регулирование скорости дает выравнивание скоростей следующей и предыдущей ступеней. Это соотношение скоростей дает при запасе момента и частоты вращения. Переключение скоростей без разрыва потока мощности выравниванием скоростей входного вала муфтой, выходного вала гидромотором-редуктором достигается чередованием механического и гидравлического потоков, переходом на гидротрансмиссию в период переключения скоростей механической передачи, сочетанием достоинств гидро- и мехпередач без увеличения числа элементов трансмиссии, т.е. совмещением и сочетанием функций муфты и насоса, гидростартера, тормоза и гидросинхронизатора, а также гидромотора, бортового редуктора, исполнительного элемента механизма поворота, гидропередачи для привода колес прицепов, бортовых муфт, тормозов и регуляторов скорости. Установка таких объемных муфт-тормозов-гидромашин и возможность переключения (последовательное, параллельное), совмещение и сочетание режимов и функций заменяет механизмы поворота, регулятор скорости и тормоза. Гидропривод колес прицепа в тяговом режиме преобразуется в гидропривод тормозов и гидроподъемника, например, переключением гидрораспределителями режимов работы. Функции элементов трансмиссии совмещаются без нарушения функций при чистом гидроприводе на низших скоростях и мехпривода на высоких, но новое сочетание открывает новые возможности управления и формирования режимов движения и курса в тяговом и тормозном режимах путем регулирования сил с учетом реакций почвы и скоростей, с учетом курса в тяговом режиме. Регулирование сил торможения по реакциям дороги и скоростей по курсу безопасно формирует режим торможения и траекторию движения (курс).
На фиг.120-122 показаны закономерности изменения параметров энергопотоков (частоты вращения П, скорости V, подачи Q мощностей механического и гидравлического потоков, потоков вала отбора мощности и колес N, Nг, Nв в различных режимах, тормозной силы Рв и мощности). При очень низкой скорости движения кратность повторения работ возрастает и при нулевой скорости достигает бесконечной работы на месте. В такой ситуации работает бульдозер при формировании различных сооружений (дамб, дорог). Передача почти всей мощности через механический вал отбора мощности к приводу рабочих органов разгружает трансмиссию ходовой части. Такая разгрузка трансмиссии и колес и резервирование сил тяги и торможения, уравновешивания полезных сопротивлений, совмещение функций и упрощение переключения скоростей без разрыва потока мощности облегчает управление и роботизацию процессов, снижает участие человека и зависимость от человеческого фактора. Независимость таких функций заменяется новыми функциями человека: он регулирует кратность повторения работ (скорость движения) не по нагрузке, а по ситуативной необходимости повторения работ, целевой обработке земли за один проход по полю. Это исключает тяжелую однородную непрерывную работу управления и облегчает контроль и изменение настройки на кратность повторения работ. При обработке тяжелых почв подача, ширина пласта, скорость движения изменяются без изменения глубины, возникает явление саморегулирования силы (силового регулирования) без специальных следящих систем. Это легко сочетается с известным силовым регулированием глубины почвообработки (подъемом рабочих органов) пропорционально давлению жидкости и полным подъемом при торможении, например, цилиндром гидроподъемника при работе в поле, когда вместо кузова и прицепа перемещаются рабочие органы. Элементы гидропривода работают в различных режимах по известному принципу.
Многоцелевая машина реализует способ обработки земли путем перемещения многорежимных оборотных самопереставляемых между ограничителями рабочих органов для выполнения различных работ (функций) со скоростью, обеспечивающей целевую обработку - изменение и повторение функций при малой тяговой нагрузке ходовой части и перемещении рабочих органов и их секций в нетормозном режиме относительно трактора.
Целевое (желаемое) состояние земли - нужный гранулометрический состав почвы, форма дамб, каналов, дорожного полотна, степень оборота пласта и крошения комков, качество уборки урожая и сорняков, форма грядок, гребней и другие требования к технологическим процессам, их совокупности и совместимости. Целевое состояние формируют рабочими органами в зависимости от типа, количества и кратности воздействия на землю.
Оборотность секций, рабочих органов, их роликов, крыльев, прутиков, сеток и т.д. повышают функциональные возможности. Применение упругих ограничителей поворота рабочих органов, секций и крыльев обеспечивает саморегулируемость положения и сопротивления. Это стабилизирует нагрузку - дает эффект силового регулятора.
Изменение скорости движения прямо пропорционально числу нетормозных рабочих органов и повышение кратности повторения функций (воздействий) снижением скорости возможно без дополнительных рабочих органов и проходов агрегата по полю.
Поворот рабочих органов вокруг двух осей и наклон оси создают поворачивающий момент от сил сопротивления. Под действием сопротивления земли рабочие органы поворачиваются до упора в ограничители, упругие ограничители допускают поворот в сторону снижения сопротивления. Известный принцип повышения сил тяги и скорости (тягового КПД) в нетормозном режиме работы преобразуется в принцип снижения сил и скоростей при высокой эффективности.
Использование шин из утиля путем резания на части и установки без камеры повышает навесоспособность, грузоподъемность, шинообеспеченность, безопасность и другие качества.
Гидросинхронизация расширяет функциональные возможности: облегчает переключение скоростей, регулирование ведущих и тормозных сил машины и бортов с учетом реакций и курса при формировании режима движения и траектории.
Корпус с рабочими органами (элементами) для оборота пласта вправо и влево поворачивается под действием сопротивления и самоустанавливается между ограничителями. Угол продольного наклона β проектирует ось впереди центра сопротивления, возникает плечо с силой сопротивления Рс, поворачивается до упора в один из ограничителей в зависимости от направления движения. При изменении направления движения и действия сопротивления (знака момента) рабочий орган и секция поворачиваются до упора в другой ограничитель и надежно удерживается при перемещении до следующего конца, где этот процесс повторяется. Сочетание оборотности орудий в тяговом (тормозном) и в нетормозном режимах при вспашке, лущении или, культивации и выполнении других работ облегчает уравновешивание агрегата в опорной плоскости. Это резервирует силу колес, повышает точность копирования базовой линии. Сочетание режимов, функций и их повторений формирует целевое состояние машины и земли.
Рабочий орган для вспашки имеет угол αк рабочего поворота между ограничителями при нормальной нагрузке. При перегрузке фиксатор 33 или упругость ограничителя допускает дальнейший (аварийный) поворот до выглубления и защиты. При изменении знака сопротивления (обратном ходе) рабочий орган включается в работу, оставляет огрех, облегчает поиск и возврат рабочего органа известной пружиной, силой тяжести до попадания фиксатора в гнездо. Рабочий и аварийный повороты (выглуления) или остановки, предохранительная муфта или клапан защиты гидропривода от повышенного давления защищают рабочие органы от перегрузки, причем кинетическая энергия рабочих органов ниже известных агрегатов. Поэтому при встрече с препятствием опасность поломки также снижается. Поворот рабочих органов вокруг двух осей между ограничителями под действием сопротивления почвы обеспечивает саморегулирование нагрузки двигателя, т.е. рабочие органы выглубляются при перегрузке и защита сочетается силовым регулированием.
Саморегулирование функций и нагрузки повышает число режимов, дает режим самостабилизации и самозащиты, регулирования глубины и ширины в отдельности и вместе, ситуативного регулирования скорости и кратности повторения функций. Поворот вокруг вертикальной оси изменяет ширину захвата и нагрузку без изменения глубины обработки, а поворот вокруг горизонтальной оси секции дает оборотность и реверсивность работы при движении в разные стороны. Изменение углового положения, ширины захвата и скорости движения расширяет функции, улучшает эксплуатационные качества обработки. Нетормозящие режимы (ведущий, толкающий, нейтральный), самоповоротный, самоочищающий в точке реверса, самопереставляемый по направлению, самоуравновешивающий при работе в противофазе, самооборотный для ровной обработки, самоповторящий работу при снижении скорости. Разлом тяжелого слоя, глубокое рыхление, срезание слоя бульдозером и другие энергоемкие операции в нетормозящих режимах минимизируются заменой сжатия изгибом по слабой связи, эластичностью упругого воздействия резинового и прорезиненного роликового рабочего органа, повышающего трение поверхности при дообработке почвы.
Многорежимный струг в зависимости от шага установки, угла поворота секции проводит лущение, культивацию, нарезку борозд, вспашку, снятия пласта для последующего перемещения лопатой.
Рабочий орган для выкопки клубней подрезает почву снизу, частично приподнимает, крошит, а поворотные прутики просеивают почву, выводят урожай вверх, а граблины прочесывают и перемещают урожай и формируют целевое состояние уборочной операции с возможностью подачи транспортером в бункер или кузов транспорта.
Функции гидросинхронизатора, гидрообъемного привода, регулятора скорости и разности скоростей бортов и тормозов совмещены с возможностью распределения энергии между колесами с учетом реакций и курса при движении в тяговом и тормозном режимах. Тормоза прицепа совмещены с приводом его колес и линией гидроподъема для разгрузки в зависимости от настройки.
Рабочие органы в тормозном режиме перемещаются вперед со скоростью, независимой от технологической потребности и кратности повторения работ, а в нетормозном режиме со скоростью, независимой от нагрузки. Подача вперед регулируется с учетом необходимой кратности повторения работ гидроподъемником путем переключения на подтяжку вперед, переключая связь (переставляя палец), подталкивая вперед упором, диском, рабочим органом, колесом, якорем, муфтой, коробкой передач и другими способами, используя силу или сигнал о конце хода или встрече с препятствием.
Дискодвижитель-якорь на оси поворота между ограничителями поворота может работать в режимах движителя высокой проходимости, малой сцепной массы и равенства скоростей продольного хода.
В условиях дороги выгодно использовать колеса без камер и снизить число колес или использовать груз в качестве сцепного веса при работе с прицепами по принципу работы догружателя колес. При работе на склонах колеса без камер повышают шинную управляемость путем снижения увода.
Аварии машин из-за прокола и пореза шин при работе на склонах и других опасных участках снижаются также путем установки частей шин без камер на обод колеса.
Повышения числа колес и ведущих осей, сцепной и тяговой сил, металлоемкости и стоимости, ширины захвата или скорости движения, частоты проходов по полю и уплотнения почвы не приводят к качественным улучшениям механизации земледелия всех зон.
Найдено полезное природе и высокоэффективное направление оптимизации скоростей выполнения работ, повышения ширины захвата и производительности техники в земледелии.
Основой нового направления является снижение числа колес и осей, металлоемкости, нагрузки и стоимости ходовой части перемещением сменных реверсивных рабочих органов или их секций относительно трактора с возможностью многократного увеличения ширины захвата и производительности, а также ослабления зависимости от типа ходовой части, крутизны склона, влажности почвы, погоды, класса трактора и других факторов. Такое снижение зависимости производительности техники от тяговых качеств ходовой части и всего трактора допускает расширение, сочетание и совмещение функций колес, реверсивных сменных рабочих органов для выполнения различных работ, датчиков курса и режимов работы, опор, утилизаторов энергии колебания, стабилизаторов опорных реакций, средств противосползания и повышения плавности хода и эластичности привода. Замещение тяжелых тяговых функций колес трактора при выполнении энергоемких процессов рабочими органами и снижение скорости движения агрегата делает колеса мягкой опорой и надежным средством передвижения в нужном направлении и получения упреждающей информации об изменении внешних условий для оценки и управления работой, курсом и траекторией (фиг.124).
Эффективность замещения функций колес рабочими органами высока на вспашке, лущении, бороновании, культивации; уборке корнеплодов, кормов с опасных зон; культурно- технических и дорожно-строительных работах, а также на неудобицах и недоступных трактору участках.
Сущность глубокого изменения функций ходовой части энергосредства-полуробота заключается в ее соединении с различными элементами с возможностью регулирования мощности по сцепным возможностям, силы, скорости, опорных реакций при работе на склонах, курса, сцепной силы, сопротивления орудий, торможения колес, утилизации энергии колебания и т.д.
Многофункциональная ходовая система - датчик сил и реакций местности, - средство слежения за коэффициентами взаимодействия с опорной поверхностью, - датчик курса и радиуса поворота, - центр Фиксированного поворота, - датчик перемещения рабочих органов, повторения работ и регулирования режимов дает информацию для управления. При замедленном движении и повторении работ нагрузку колес можно снизить до нуля и понизить точность информации, подачи вперед и повторения работ. Такое очувствление ходовой части и снижение ее нагрузки и зависимости силы тяги и производительности от массы и тягово-сцепных качеств совмещаются с очень большой выгодой для производителя и пользователя техники.
Сравнение производительности трактора с обычной машиной и с реверсивными рабочим органами подтверждает возможность устранения зависимости от металлоемкости, тягово-сцепных возможностей, буксования, числа осей и колес, тягового класса и других показателей, отрицательно влияющих на экономику, природу и человека:
W = G(ϕ-ψ)vt;
Pϕ = ϕG,
δ ≠ 0,
W = vpПΔSt;
ΔS = Шp/K,
δ → 0,Pкр→ 0,
где G - сцепной вес, ϕ,ψ,δ - соответственно коэффициенты сцепления, сопротивления и буксования, v, T - скорость движения и время, Pϕ - касательная сила тяги по сцеплению, vp, П - скорость и число секций рабочих органов, ΔS - подача и ширина захвата рабочих органов, К - коэффициент повторения работ за один проход агрегата, Ркр - крюковая сила.
Снижение массы, стоимости, периода бездействия, холостого хода, скорости перемещения рабочих органов реверсивного типа и стоимости операций и продукции пропорционально повышению возможности роботизации земледелия, соблюдению более 70 правил и законов.
Эффективность применения колесной машины можно повысить пропорционально повышению движущей силы рабочего органа, допустимой нагрузке ведущей оси (по прочности) и емкости операций, т.е. произведению числа совмещенных операций и времени работы.
Тяговые, скоростные и функциональные свойства рабочего органа-движителя достаточны для отказа от тяжелых тракторов и методов повышения тягово-сцепных качеств при обработке почвы.
Удельную мощность трактора можно легко повысить, а тяговый класс и металлоемкость - снизить в 4-5 раз путем простого преобразования сопротивления в машинную силу и уравновешиванием рабочих органов, работающих в противофазе.
Динамический фактор трактора и автомобиля и ширина захвата агрегата пpи почвообработке могут быть повышены безгранично и использованы для интеграции операций и снижения числа проходов по полю. Динамический фактор и тяговая сила изменяются пропорционально сопротивлению и открывают путь повышению эффективности механизации и роботизации земледелия во всех зонах.
Зависимость средней скорости от технологической полезности снижает потребность в регулировании скорости обратно пропорционально нагрузке.
Значение и эффективность движущей силы рабочего органа возрастают пропорционально глубине почвообработки и в 2-20 раз выше, чем у принципа повышения числа ведущих осей трактора.
Эффективность движения и выполнения технологических процессов закономерно связаны между собой и с необходимостью минимизации количества движения.
Движущая сила и КПД рабочего органа пропорциональны разности давлений на рабочую и тыльную поверхности. Эта сила возрастает с глубиной и толщиной пласта.
Внутреннее сопротивление взаимодействия рабочих органов можно усилить циркуляцией энергии толкающих сил этих рабочих органов, т.е. частичным преобразованием сопротивления в силу путем циркуляции энергии.
Внутреннее сопротивление элементов агрегата снижается намного легче, чем силы взаимодействия с почвой.
Мощность, расход топлива и нагрузка двигателя определяются положением, размерами и числом рабочих органов с учетом нелинейной зависимости от глубины почвообработки.
Число операций определяется состоянием почвы и целью ее обработки, сила - по сопротивлению, производительность - по мощности, ширина захвата - по условиям работы, скорость - по качеству работы и технологической необходимости.
Регулирование мощности двигателя с учетом сцепных возможностей колес снижает потери энергии на буксование в несколько раз и благоприятно влияет на работу машины.
Ограничение мощности по допустимой нагрузке потребителя защищает технику.
Тяговое сопротивление адаптивно нагружает ходовую часть сцепной силой до и после отрыва переднего моста от земли, следовательно, повышает приспособляемость к изменению нагрузки.
Мощность двигатели в режиме тяги и привода машин должна соответствовать допустимым нагрузкам рабочих органов ведущего и ведомого типа.
При неизменной нагрузке двигателя мощность в контакте колес с почвой в зависимости от типа и режима движения может быть отрицательной и близкой к нулю.
Скорости движения трактора и рабочих органов должны быть обратно пропорциональны их массам при стогом определении скорости рабочих органов с учетом качества работы. Этим снижается количество движения и затраты энергии на уплотнение почвы.
Скорости перемещения рабочих органов относительно трактора и вместе с ним зависят от их траекторий. При продольном перемещении скорость движения рабочих органов зависит от направления (вперед, назад), снижается ширина захвата, повышается скорость движения агрегата и исключается влияние длины хода рабочих органов на ширину захвата агрегата. Поперечное перемещение рабочих органов повышает ширину захвата до произведения числа секций рабочих органов и их хода. В промежуточных положениях на ширину захвата влияет угол отклонения траекторий движения рабочих органов и трактора. Различие скоростей перемещения рабочих органов вперед и назад отрицательно влияет на ряд процессов, а холостой ход снижает эффективность.
Скорости перемещения рабочих органов оптимально стабилизируются при их поперечном ходе. При этом скорость движения агрегата минимизируется. На скорость перемещения рабочих органов влияют формы их рабочих поверхностей. Замена деформации сжатия почвы растяжением и изгибом пласта снижает расход энергии на крошение. Скорости перемещения рабочих органов и трактора геометрически суммируются. Повышение ширины захвата агрегата поворотом линии перемещения рабочих органов снижает различие их скоростей до нуля, а снижение ширины захвата агрегата до ширины захвата рабочих органов продольного хода повышает различие скоростей до скорости движения трактора.
Изменение соотношений скоростей перемещения рабочих органов и движения трактора корректирует функции машины, кратность воздействия на почву (повторность обработки) за один проход трактора. Разгон и торможение агрегатов и их элементов, регулирование ведущего и тормозного моментов колес их приводом, воздействием на двигатель, трансмиссию и движители для использования коэффициентов их сцепления, буксования и скольжения имеют общую научно-методическую основу. В науке и на практике процессы разгона и торможения, проблемы развития средств осуществления этих процессов разобщены. По мере повышения масс и скоростей движения машин и агрегатов процессы разгона и торможения усложняются и проблемы обостряются. Автономное их решение повышает стоимость их изготовления и использования. Поэтому возникла необходимость в поиске общего решения.
Разгон и торможение отличаются знаком воздействия на процессы и машину. Накопление энергии при разгоне и уничтожение при торможении возможны без дублирования элементов, т.е. сочетанием их функций. При низкой скорости движения (включении ходоуменьшителя) проблемы разгона и торможения не возникают. С увеличением частоты остановок значение разгона, остановок и реверсирования рабочих органов возрастает и затрагивает вопросы энерго- и ресурсосбережения. Наиболее эффективно такая задача решается исключением торможения искусственным сопротивлением. Энергия рабочих органов без уничтожения тормозами расходуется на выполнение технологических процессов: почвосопротивление многократно превосходит сопротивление колес и эффективно останавливает рабочие органы. Поэтому энергия разгона полностью используется на полезную работу.
Торможение трактора для удержания агрегата в неподвижном состоянии не требует затрат энергии.
Разгон и торможение колес и гусениц для регулирования разности скоростей и сил при формировании траектории затрудняет эффективное использование энергии и явно влияет на энерго- и ресуроосбережение. Снижение скорости на порядок соответственно влияет на КПД.
Отрицательная мощность в контакте колес с почвой с вычетом потерь может быть возвращена к рабочим органам. Но циркуляция мощности в приводах колес и рабочих органов-движителей перегружает их и возможна при необходимости интеграции мощностей тракторов в режиме непрерывного движения. Остановка трактора исключает это явление и допускает оптимальное движение рабочих органов относительно трактора.
Количество движения агрегата, технологической машины и рабочих органов можно выравнить выбором скоростей по массам. Скорость перемещения рабочего органа при вспашке на порядок ниже скорости движения рабочего органа.
Скорость движения агрегата пропорциональна скорости перемещения и ширине захвата рабочего органа.
Ширина захвата изменяется независимо от скорости числом секций рабочих органов.
Скорость движения агрегата, сопротивление и ширина захвата независимы друг от друга и от сцепной силы, если часть сопротивления преобразуется в силу. Независимость сил тяги и тяжести открывают новые возможности для развития.
При взаимном уравновешивании сил рабочих органов зависимость сил от массы приближается к нулю.
Скорость оборота пласта почвы зависит строго от угла крутизны склона: при обороте пласта вниз снижается, а при обороте вверх увеличивается. На уклоне избыток движущих сил требует применения рабочих органов - тормозов (ведомого типа).
Функции рабочего органа для обработки почвы выполняются путем его перемещения, подачи и передачи некоторой части сопротивления paмe - совмещением технологических функций, источников силы и преобразователей движения. Все движения и функции можно регулировать.
Анализ функций элементов техники в земледелии, разработка физических моделей, методов их сочетания и коррекции, исследование и оценка работы параметром произведения "сила•время" (Р•Т) или "функция•время" (Ф•Т) открыли новые пути повышения эффективности регулирования сил тяги, тяжести, нагрузки и функций элементов техники; снижения запаздывания действий, числа ошибок управления, скорости и массы (количества движения); приближения передаточных функций к передаточним числам; передачи потоков энергии и информации в обе стороны (от насоса в гидроцилиндру и наоборот) при минимальной физической работе управления агрегатом.
Нa принципе догрузки колес базируется развитие транспортных процессов и на разгрузке их основанно повышение эффективности работ в земледелии. Сочетание функций элементов техники является эффективным направлением повышения производительности без повышения скорости и нагрузки колес. Преобразование сопротивления реверсивных рабочих органов в машинную силу удваивает эффективность техники, например стоимость кВт мощности при передаче через ходовую часть к технологической машине возрастает в два раза (теряется половина).
При этом зависимость полезности и вредности воздействия на почву, производительности, работоспособности и эффективности от рельефа, погоды, влажности почвы, длины гона, скорости, массы, времени, буксования, человеческого фактора обостряет производство и применение техники. Нетормозной режим и повторение работ дают прорывной путь.
Базовые показатели повышения производительности (скорость и сила тяги) в 20 веке возросли в десятки раз и достигли критических значений, обострили проблемы механизации и роботизации земледелия, эргономики, экологии и т.д. до такого уровня, что создали тупиковое состояние, выход из которого - новое направление повышения сил в десятки раз на различных работах при малой нагрузке колес.
Использование способа и машины обеспечивает реверсивность и оборотность, многорежимность и саморегулируемость положения и нагрузки, преобразуемость сопротивления в силу, повторность функционирования, сочетаемость изменений и повторений функций путем снижения скорости, возможность снижения числа проходов, сил тяжести и тяги при выполнении основных работ без буксования, снижение уплотнения почвы до 30 раз, расхода топлива в два раза, числа и стоимости колес до 4 раз, типов машин и расхода металла более 10 раз, повторение работ без дополнительных проходов и рабочих органов, дистанционность работ более 10 раз, превосходство мирового уровня по всем показателям от 2 до 34 раз.
Широта охвата функций при малой нагрузке колес позволяет унифицировать энергетические средства (легкие машины, тяжелые тракторы с возможностью выполнения функций болотоходных и суппер болотоходных и тяжелых промышленных тракторов) с возможностью обеспечения хорошей динамики, экономичности, управляемости, безопасности и производительности, проходимости и плавности хода.
Утилизация шин путем резания на части и применения без камер повышает навесоспособность и шинообеспеченность, снижает опасность и зависимость от погоды и условий местности.
Изменение сил движения и торможения с учетом реакций местности и курса (целевой траектории), преобразование энергопотоков и режимов работы путем совмещения функций компонентов трансмиссии, преобразование принципа повышения сил тяги и тяжести и скорости движения (тягового КПД) в принцип снижения сил тяги и тяжести и скоростей - переворот в технологии и технике открывает неисчерпаемые возможности замещения функций человека техническими средствами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ ЗЕМЛИ И МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2226326C2 |
| МАШИНА ДЛЯ ОБРАБОТКИ ПОЧВЫ | 2001 |
|
RU2232490C2 |
| СПОСОБЫ ОБРАБОТКИ ПОЧВЫ И УПРАВЛЕНИЯ И МАШИНА ДЛЯ ИХ РЕАЛИЗАЦИИ | 2007 |
|
RU2370007C2 |
| СПОСОБ УПРАВЛЕНИЯ МАШИНОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2337851C2 |
| АГРОМАШИНА | 2004 |
|
RU2342821C2 |
| СПОСОБ ОБРАБОТКИ ЗЕМЛИ И АГРОМАШИНА | 2003 |
|
RU2265298C2 |
| АГРОМАШИНА И СПОСОБ ЕЕ ИСПОЛЬЗОВАНИЯ | 2003 |
|
RU2264320C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЧВООБРАБАТЫВАЮЩИМ АГРЕГАТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2090992C1 |
| УСТРОЙСТВО ДЛЯ ВЫПОЛНЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ РАБОТ | 1996 |
|
RU2170497C2 |
| СПОСОБ ОБРАБОТКИ ПОЧВЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2086084C1 |

Изобретение предназначено для обработки земли и может быть использовано в сельском хозяйстве. Способ включает обработку земли перемещающимися реверсивными рабочими органами. Способ осуществляют устройством, содержащим энергетическое средство, колеса, реверсивные рабочие органы и их привод. Для обеспечения поворота в двух плоскостях рабочие органы имеют основную и дополнительную оси самоповорота и ограничители угла поворота. Рабочие органы выполнены в виде катков, или комкодробителей, или лапы, или роликового отвала, выполненных из частей утилизованных шин. Дополнительные рабочие органы выполнены в виде плужных корпусов, или дисков, и/или бульдозерной лопаты, или кинжаловидной лапы, или рыхлителя, или окучника, или граблины. Колеса машины выполнены из утилизованной шины или ее частей или имеют полосу из утилизованной шины с шипами. При обработке засоренной или зараженной почвы возможно увеличение глубины запашки при снижении ширины захвата машины. Такие технология и конструктивное выполнение позволяют повысить эффективность формирования целевого состояния земли и расширить функциональные возможности. 2 с. и 10 з.п. ф-лы, 124 ил.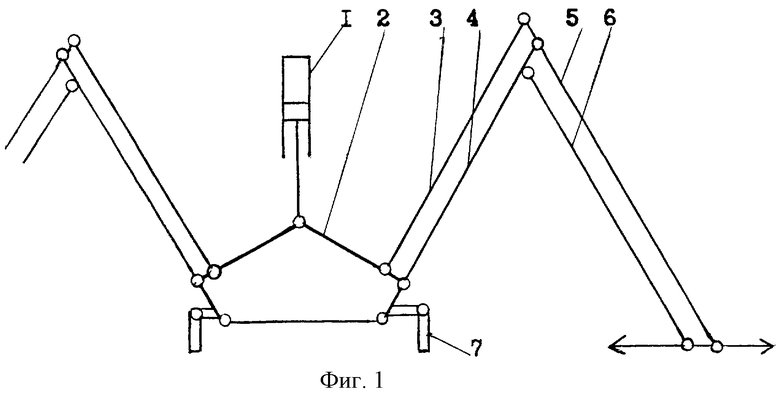
| RU 96118188 А1, 20.12.1996 | |||
| RU 2073387 С1, 02.02.1997 | |||
| RU 95103726 А1, 20.12.1996 | |||
| Использование отработанных шин для производства резиновотехнических изделий | |||
| Рельсовый башмак | 1921 |
|
SU166A1 |
| Горьковский межотраслевой территориальный центр научно-исследовательской информации и пропаганды | |||
| Изд | |||
| отдел Горьковского ЦНТИ, 1986. | |||

