Изобретение относится к системе управления агрегатом на пересеченной местности и может быть использовано в качестве системы корректирования скорости и вертикальных нагрузок на ведущие колеса, средства силового регулирования (и перераспределения) опорных реакций и скорости движения сельскохозяйственного агрегата на пересеченной местности и в горной зоне.
Известны тракторы и рабочие орудия для выполнения технологических процессов в сельском хозяйстве, включающие системы управления подъемным устройством, регулирования скорости движения и глубины почвообработки, бортовой компьютер и электронную систему контроля и управления. Система управляет включением переднего моста, торможением и блокировкой дифференциала. Исходная информация от датчиков скорости, положения и давления и с пульта управления поступает в электронный блок. Там показатели анализируются и формируются указания к действию в виде электрических сигналов, отрабатываемых в исполнительных механизмах. Система отключает блокировку дифференциала во время подъема орудия и торможения трактора на краю поля или в случае падения давления в гидросистеме. Если оператор задал компьютеру предельное значение буксования колес, то при превышении этого предела устройство дает команду на выглубление орудия и, наоборот, при малой пробуксовке его заглубляет. Подробное описание таких аналогов дано в Экспресс-информации "Тракторы и двигатели" ЦНИИТЭИтракторосельхозмаш. М, 1988, вып. 3.
Известна система силового регулирования тракторного агрегата, включающая трактор, навесное орудие, механизм навески. Для выбора режима работы навесного орудия в кабине трактора Мерседес Бенц имеется переключатель для выбора позиционного, силового и смешанного регулирования, выключатель, предназначенный для передачи управления на кнопки дистанционного управления, размещенные на крыльях задних колес, и для выключения системы, ограничитель подъема и регулятор скорости перемещения навесного устройства. При позиционном регулировании используется сигнал положения рычага навески с помощью датчика, расположенного на валу рычагов подъема. При силовом регулировании сигналы поступают от датчиков усилия, выполненных в виде осей нижних тяг механизма навески. Комбинированное управление может быть со смещением в сторону позиционного или силового, что используется при меняющейся плотности почвы. Движение тяг ограничивается и фиксируется в заданном положении. Подробно такая система описана в Эксперсс- информации ЦНИИТЭИтракторосельхозмаш, вып. 18, 1987.
Известные системы имеют дроссельные регуляторы расхода и давления жидкости на выходе усилителя и потребляют много энергии, не могут согласовать догрузку ведущих колес силой тяжести с изменением сил сопротивления движению.
Характеристика прототипа, выбранного заявителем.
Известны универсально-пропашные тракторы "Беларусь" МТЗ-80, МТЗ-100, МТЗ-145, содержащие универсальную гидросистему с силовым, позиционным, высотным и смешанным регулированием глубины обработки почвы. Трактора оборудуются гидросистемой отбора мощности. Системы автоматического регулирования имеют дроссельные регуляторы расхода и давления жидкости на выходе усилителя. Переменное сопротивление почвы, неровности поверхности и другие нагрузки часто требуют изменения расхода жидкости. Поэтому линия питания имеет гидроаккумуляторы. Для получения сигнала о тяговом сопротивлении и нагрузке на колеса орудий используются сложные датчики и для настройки системы требуется сложная электронная система информации. Все это усложняет работу водителя и повышает материалоемкость, снижает эффективность. Отсутствие саморегулируемости, четких критериев оценки, закономерностей связи параметров и согласованности скорости, мощности, догрузки ведущих колес, сопротивления орудий и буксования затрудняет работу тракториста. В качестве силоизмерительных устройств (датчиков) используются пружины, торсионы, патенциометрические датчики усилия. Устройства релейного типа управления по сигналам таких датчиков имеют запаздывание действия, потребляют много энергии и плохо приспособлены к упругой подвеске. Рессорная подвеска затрудняет работу с бульдозером и с навесными орудиями, так как изменение нагрузки и сопротивления связаны не четко: увеличение сопротивления увеличивает догрузку и сопротивления и т.д. до остановки или нарушения качества работы. Все это в совокупности снижает эффективность и приспособляемость к изменению нагрузки.
Существенным недостатком известного прототипа является то, что отсутствие согласованности потока мощности к движителям с корректированием опорных реакций и дросселирование жидкости снижают экономичность и приспособляемость к изменению нагрузки. Необходимость установки нескольких автономных гидросистем и гидроаккумуляторов повышает материалоемкость, затрудняет оперативное корректирование потоков энергии, а это снижает скорость исполнения команд, вносит запаздывание в работу.
Целью изобретения является повышение экономичности и приспособляемости к изменению нагрузки.
Поставленная цель достигается тем, что в потоке мощности к движителям при сглаживании колебаний нагрузки массу навесного орудия используют в качестве грузового аккумулятора, давление в гидролинии привода движителей используют при регулировании опорных реакций, напряжений почвы и сопротивления орудия, регулирование скорости по нагрузке согласовывают с корректированием вертикальных нагрузок и высоты почвообработки, догружение ведущих колес согласовывают с регулированием нагрузки и скорости, линию силового регулирования соединяют с приводом колес, пропорционально сопротивлению движению догружают движители силой тяжести орудий, глубину почвообработки, нагрузку и деформацию рессор согласовывают с сопротивлением рабочего орудия. Механизм подъема навесного орудия соединяют с приводом движителей и объемной муфтой делителем потока энергии, объемную муфту и делитель потока энергии совмещают с насосом привода дополнительной оси и питания гидроподъемника навесного орудия, механизм навески орудия соединяют с подвеской ведущих колес, орудие подвешено к раме поворотным рычагом и соединено с органом регулирования скорости, регулятор скорости связан с гидрораспределителем механизма навески. По сигналу об изменении скорости регулируют высоту орудия, при этом за пределами регулирования скорости изменяют сопротивление орудия.
Дросселирование жидкости и гидроаккумулятор исключают соединение систем регулирования нагрузки и корректирования опорных реакций по давлению жидкости в линии привода движителей. По сигналу регулятора дизеля регулируют высоту орудия и глубину почвообработки. Гидроцилиндр механизма навески соединен с гидроделителем потока энергии и давление жидкости в напорной линии без усилителей используют для догрузки ведущих колес и разгрузки опор орудия. При использовании всей энергии для быстрого подъема орудия притормаживают агрегат.
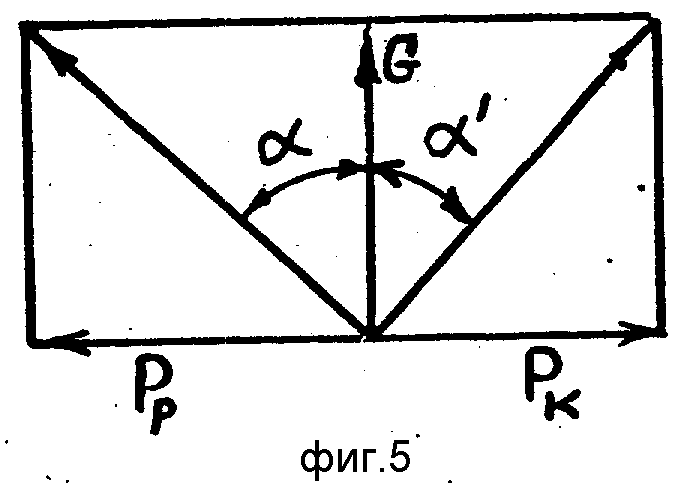
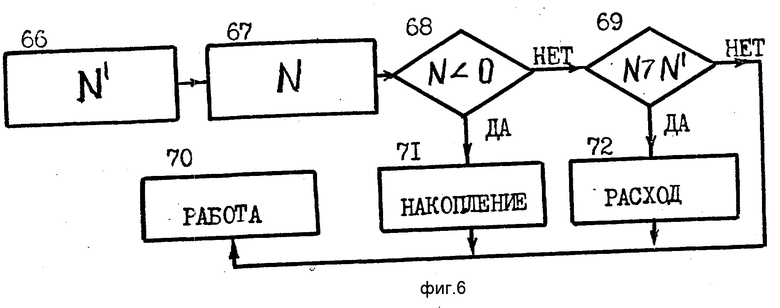
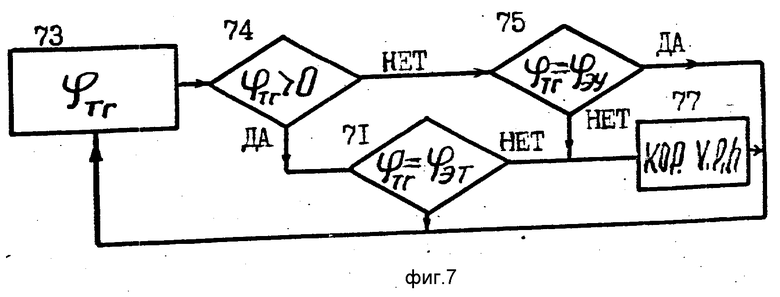
На фиг. 1 изображена конструктивная схема элементов, реализующих способ и согласовывающих регулирование скорости с догрузкой ведущих колес; на фиг. 2 схема согласования привода с догружателем колес, вариант с гидроприводом одной оси; на фиг. 3 схема механизма навески и предохранения орудия от поломок при перегрузке и стабилизации нагрузки; на фиг. 4 схема средства для получения сигнала о коэффициенте тяги и согласования сопротивления орудия с догрузкой колес без их гидропривода и в варианте с рессорной подвеской для сглаживания колебаний нагрузки рессорной подвеской; на фиг. 5 схема действия сил тяги и толкания с силами тяжести G при получении сигнала α где Pкр/Pр сила тяги и толкания; на фиг. 6 схема алгоритма реализации способа регулирования мощности N' по нагрузке N при стабилизации скорости в режиме оптимального нагружения. На фиг. 7 схема алгоритма осуществления способа регулирования скорости V, опорных реакций G, высоты орудия h с учетом коэффициентов тяги vтг, эффективности тяги  эффективности утилизации. Способ согласования работы насоса дизеля, дозатора водорода, электролизера, генератора при торможении им агрегата на уклоне и накопителя пневмоэнергии с гидрораспределителем механизма навески при осуществлении способа на пересеченной местности с накоплением энергии на уклоне и расходом ее на подъеме осуществляют системой, приведенной на фиг. 1 по алгоритму, блок-схема которой изображена на фиг. 7.
эффективности утилизации. Способ согласования работы насоса дизеля, дозатора водорода, электролизера, генератора при торможении им агрегата на уклоне и накопителя пневмоэнергии с гидрораспределителем механизма навески при осуществлении способа на пересеченной местности с накоплением энергии на уклоне и расходом ее на подъеме осуществляют системой, приведенной на фиг. 1 по алгоритму, блок-схема которой изображена на фиг. 7.
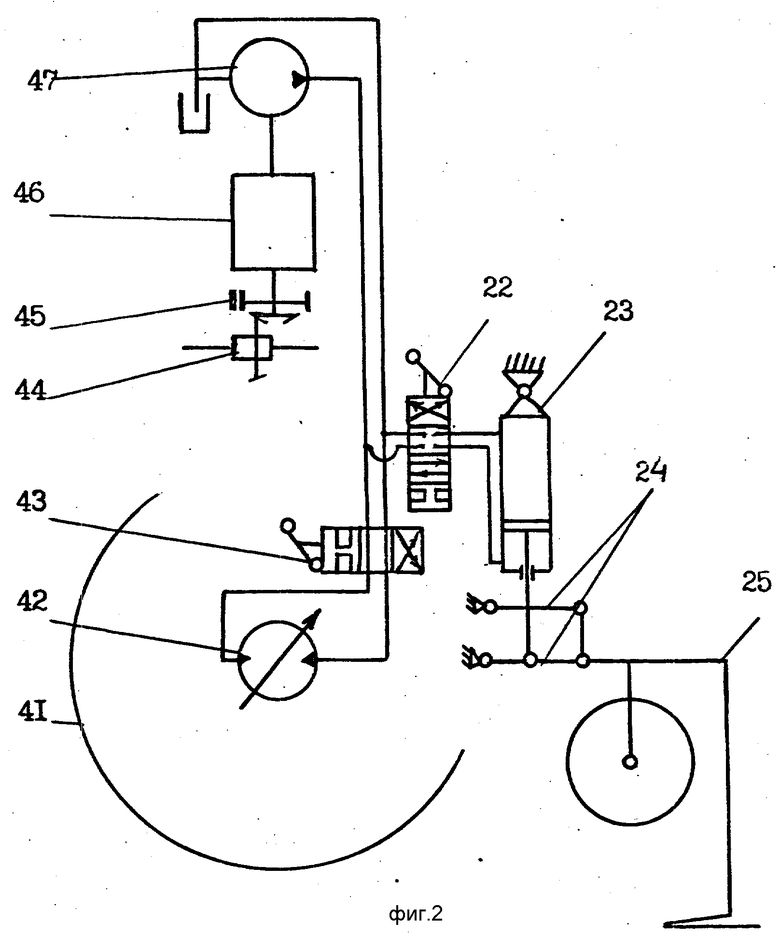
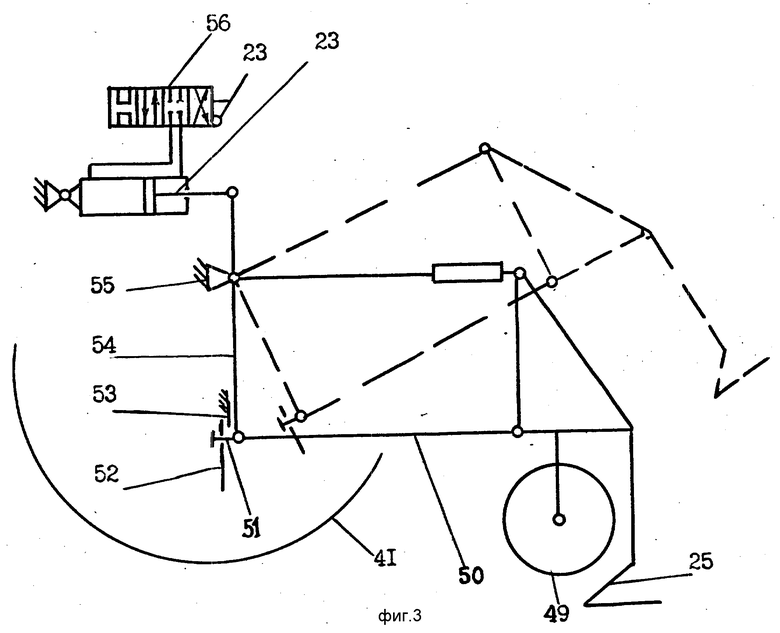
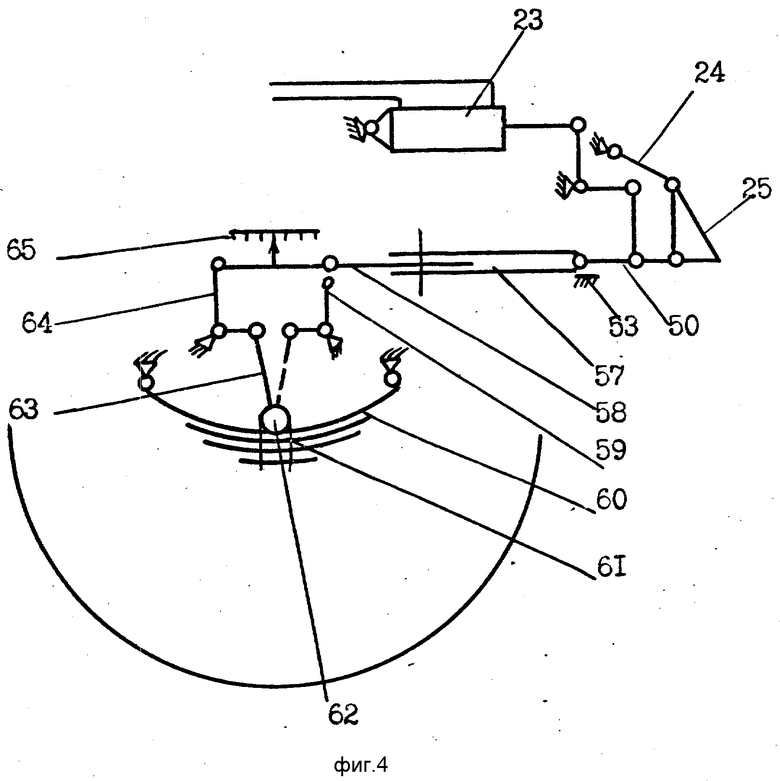
Система для осуществления способа управления агрегатом на пересеченной местности включает регулятор 1 (фиг. 1) скорости, связанный рычагом 2 регулирования давления газов в баллоне 3 при помощи крана 4 и тяги управления выхлопным коллектором 6 в момент его запирания заслонкой 7, трубку 8 подачи газов, педаль 9 с тягой 10 связи, турбину 11, обратный клапан 12, пропускающий газы только в баллон, контакты 14 включения обмотки 15 возбуждения и генератора 16, рычаг 17 управления тормозным краном 18, связанный трубопроводами 19 с тормозами колес, тягу 20 и рычаг 21 гидрораспределителя 22 управления гидроцилиндром 23 механизма навески 24 орудия 25, коробку скоростей 26 с органом управления 27 через тягу 28 связи с регулятором, электролизер 29 с трубкой 30 связи с дозатором 31, рычаг которого связан с включателями 32 и 33 и тягой 34 управления, трубку 35 связи с впускным коллектором 36, в котором установлен компрессор 37, топливный насос 38, управляемый педалью 39 через тягу 40 связи с регулятором. Ведущие колеса 41 (фиг. 2), приводимые от гидромотора 42, управляемого гидрораспределителем 43, дополняют механический привод 44 с тормозком 45 после коробки 46 скоростей. Насос 47 может быть установлен до и после коробки. При установке до коробки насос 47 совмещает функции объемной муфты и служит для гидравлического отбора мощности для привода дополнительной оси и питания гидроцилиндра 23. Механизм навески содержит регуляторы длины верхней тяги 48 и раскосов. Навесное орудие может иметь опорное колесо 49. Нижние тяги 50 механизма навески можно шарнирно соединить с тягой 51, жестко соединить с фиксатором 52 на раме 53. Рычаг 54, качающийся вокруг оси 55, связан с гидроцилиндром 23, управляемым гидрораспределителем 56 автономной гидросистемы или объединенной с приводом одной оси, или гидравлической системы отбора мощности. В варианте выполнения системы для получения информации о коэффициенте тяги Φтг нижняя тяга 50 механизма навески связана через регулятор 57 (фиг. 4) длины тяги 58 с рычагом 59, с рессорой 60 и ее хомутом 61 с осью 62. Тяга 63 соединяется с рычагом 59 при работе в тяговом режиме и с рычагом 65 при работе в толкающем режиме с реактивными орудиями или с бульдозером. Силы тяги, толкания и тяжести можно привести к оси и получить тождественное равенство для оценки взаимосвязи машины с местностью, как это показано на фиг. 5.
Способ и система управления на пересеченной местности включают настройку 66 (фиг. 6), изменение 67 внешней нагрузки N, сравнение 68 с нулем для определения тягового режима на выходе "ДА", сравнение 69 нагрузки N с оптимальной и экономичной мощностью N' для продолжения 70 работы по сигналу "ДА" или накопления 71 энергии в тормозном режиме и расходование накопленной энергии 72 при перегрузке. С учетом деформаций, буксования способ осуществляют слежением 73 (фиг. 7) за коэффициентом тяги Φтг сравнением его с нулем 74 и с коэффициентом эффективности утилизации Φэу 75, сравнением 76 с коэффициентом эффективности тяги, коррекцию 77 скорости V давления P, сил тяги Pк и тяжести G и глубины h почвообработки для управления посредством обратной связи.
Регулятор 1 может ввести сигналы для накопления газов в баллоне 3, т.е. открыть и закрыть кран 4 и заслонку 7. Клапан 12, пропуская газ только в баллон 13, может накопить энергию для пневмопривода тормозов через тормозной кран 18. Тяга 20 или рычаг 21 могут управлять гидрораспределителем 22 и гидроцилиндром 23 механизма навески 24 орудия 25 при подъеме, опускании, запирании (фиксации) и копировании поверхности поля. Коробка передач 26 может регулировать передаточное число трансмиссии в зависимости от положения органа управления 27, при этом положение определяют водителем или без его участия тягой 28 по сигналу регулятора. Электролизер преобразует электроэнергию генератора 16 в водород и включает при торможении замыканием контактов 14 обмотки 15 возбуждения генератора 16. Дозатор-смеситель 31 и топливный насос 38 подают топливо в соответствии с сигналом регулятора. Педали 9 и 39 допускают общение человека с агрегатом. Взаимосвязь элементов управления обеспечивают рычагами, проводами, тягами, трубками 5, 10 17, 19, 20, 28, 30, 35, 34, 40. При этом связи элементов можно выключить и включить включателями 32 и 33. Турбокомпрессоры 11 и 37 могут обеспечить наддув двигателя при утилизации энергии выхлопных газов.
Насос 47 работает в качестве объемной муфты и средства отбора мощности для привода рабочих орудий и оси агрегата. Распределители 22 и 43 задают режим работы орудия и оси. Гидроцилиндр 23 механизма навески 24 орудия 25 преобразует давление жидкости в гидролинии в усилие управления навесным орудием 25. Возможно выполнение автономной гидросистемы или распределителя 56 управления навесной машиной 25. Нижние тяги 50 механизма навески можно соединить рычагом 52 с рамой 53 или с рычагом 54, качающимся вокруг шарнира 55. Орудие 25 от бокового перемещения можно удержать цепями ограничения, как это принято в механизмах навески. Подвеска колеса может быть рессорной для приведения сил тяги и тяжести к оси или без нее. Регулятор 57 длины тяги 58 задает режим при настройке для получения информации о соотношении сил тяги и тяжести. Рычаги 59 и 64 допускают связь с рессорой для осуществления догрузки ведущих колес без затрат энергии и управления массами и глубиной почвообработки при выполнении различных технологических процессов.
Алгоритм осуществления способа управления агрегатом на пересеченной местности предусматривает накопление энергии торможения и расход этой энергии при разгоне и перегрузке. Эффективность взаимодействия агрегата с почвосредой в тяговом механизме и тормозном режимах оценивают коэффициентами эффективности тяги и утилизации. Способ предусматривает замену множества способов оценки взаимодействия агрегата с почвосредой, исключение противоречий из теории и практики проектирования и оценки агрегатов и различных толкований связей сил тяги, толкания и тяжести при работе различных машин в реальных условиях работы в поле.
Способ управления агрегатом на пересеченной местности осуществляют приведенными элементами системы управления в степной и горной зонах. Регулятор 1 рычагами и тягами связи обеспечивает увеличение подачи топлива насосом 38 и дозатором 31 в зависимости от нагрузки и уменьшает до нуля при снижении нагрузки и изменении знака ее в период перехода через нейтральный режим в тормозной при движении на уклоне и торможении на равнине и на склоне.
При торможении и движении с отрицательной нагрузкой (под действием толкающей силы) регулятор включает процессы накопления энергии в виде давления газов в баллонах 3 и 13, выработку электроэнергии генератором 16 для электролиза в электролизере 29 для получения водорода и накопления его для расходования в режиме перегрузки двигателя. За пределами такого управления по сигналу регулятора 1 регулируется передаточное число коробкой передач 26 и глубина почвообработки. При перегрузке тяга 20 поворачивает рычаг 21 и распределитель 22 подает жидкость в гидроцилиндр, частично поднимает орудие 25 вверх и исключает сигнал и ошибку управления, преодолевает перегрузку. При снижении, наоборот, распределитель 22 выпускает жидкость из полости подъема, орудие 25 опускается и восстанавливает глубину обработки почвы. Такое управление по сигналу регулятора реализует накопленную ошибку.
Способ управления по упреждающему сигналу реализуют насосом 47, в напорной линии которого давление определяется автоматически внешней нагрузкой. Распределителем 22 и цилиндром 23 при таком управлении реализуется принцип управления орудием 25 по нагрузке. В этом случае догрузка ведущих колес 41 массой орудия 25 зависит строго от давления и нагрузки. При повышении давления жидкости в напорной линии насоса повышается давление в полости подъема гидроцилиндра, колесо орудия разгружается и догрузка колеса 41 возрастает. При снижении давления и нагрузки, наоборот, подъемная сила гидроцилиндра 23 уменьшается. Таким образом, регулируя давления жидкости в напорной линии и полости подъема орудия, используя свойство регулирования гидромотора 42, непрерывно регулируются опорные реакции ведущих колес, осуществляется догрузка ведущих колес без дросселирования жидкости и без автономной гидросистемы и потерь энергии. При необходимости подъема в конце гона агрегат можно притормозить и поток мощности переключить для быстрого подъема орудия. При этом возможно использование и тормозка 45, гидромотора 42 и тормозов колес. При необходимости разгрузки колеса и принудительного заглубления гидрораспределитель переключает управление и давление в напорной линии, с учетом торможения создается давление в полости опускания. Вариант управления (фиг. 3) с автономным питанием не требует торможения для подъема. Но при корректировании вертикальных нагрузок питание переключается к насосу 47 - объемной муфте. В случае работы орудия без связи с насосом (фиг. 3) в зависимости от положения рычага 52 возможно жесткое соединение с орудием или свободное перемещение в вертикальной плоскости в зависимости от сопротивления почвосреды. При повышении сопротивления или возникновении аварийной ситуации из-за встречи с камнем орудие поднимается, как это показано пунктиром на фиг. 3. После прохождения препятствия силой тяжести орудие опускается. Этим орудие предохраняется от поломки при работе на каменистой поверхности и при освоении нового участка.
Автоматическое корректирование вертикальных нагрузок с учетом нагрузки при выполнении рессорной подвески и отсутствии гидропривода без потерь энергии на догрузку ведущих колес осуществляют использованием рессорной подвески для слежения за соотношением сил тяги и тяжести в тяговом режиме и сил толкания и тяжести в толкающем режиме. При повышении нагрузки на крюке тяга 50 (фиг. 4) передает сигнал регулятору 57 длины, тяге 58 и рычагу 64, связанному тягой 63 с рессорой, частично поднимает раму и орудие и дает на шкале 65 указателя или датчиком информацию о коэффициенте тяги. При снижении силы тяги силы тяжести и упругости рессоры снижают показания. Таким образом, сила тяги и толкания в горизонтальной плоскости и сила тяжести G в вертикальной плоскости приводятся к оси и рычаги 59 и 64 выдают сигнал поворота на угол α,α′ в зависимости от направления. Этот угол характеризует соотношение сил тяги и тяжести:
α = arctgPp/G; α′= arctgPk/G; Φтг= Pk/G
С учетом буксования и скольжения колес можно определить коэффициент эффективности тяги и утилизации:
Φэт= Φтг/б = Pk/Gб; Φэу= Pp/Gб,
где б буксование в тяговом режиме и скольжение в тормозном.
При автоматическом управлении навесным орудием сигнал регулятора используется для регулирования расхода топлива, передаточного числа трансмиссии, а затем сопротивления орудия. При повышении нагрузки увеличиваются расход топлива и высота орудия. При снижении нагрузки, наоборот, орудие опускается до заданной глубины. В каждом случае регулирование высоты орудия обеспечивает корректирование опорных реакций ведущих колес. Изменение догрузки колес по нагрузке на крюке вызывает изменение радиуса качения колеса и скорости движения. При догрузке колес внешней нагрузкой радиус качения и скорость движения снижаются. При разгрузке, наоборот, радиус качения и скорость синхронно возрастают. Для осуществления такого управления параметры приводов и подвесок имеют строгую закономерную связь. Взаимосвязь и взаимозависимость привода колес с механизмом навески орудий можно обеспечить гидравлическим приводом, рессорой и элементами электрической связи. В потоке мощности к движителям в качестве грузового аккумулятора используют орудие. Поэтому в каждом случае регулирование опорных реакций и нагрузки происходит согласованно. Регулирование скорости согласовывают с корректированием опорных реакций и высоты почвообработки, догружение ведущих колес согласовывают с регулированием скорости, линию силового регулирования соединяют с приводом колес так, что пропорционально сопротивлению движения движители догружают силой тяжести орудий. Глубину почвообработки, нагрузку, деформацию рессор согласовывают с догружателем ведущих колес. По сигналу об изменении скорости регулируют высоту орудия. В каждом случае гидроаккумулятором служит механизм навески, гидроцилиндр которого поддерживает орудие и становится грузовым аккумулятором для сглаживания колебаний нагрузки и корректирования опорных реакций силовым потоком без дросселирования жидкости и без потерь энергии. Соединение гидроцилиндра механизма навески с трансмиссией исключает усилитель системы ведущих колес.
Механизм подъема навесного орудия соединяют с приводом движителей, объемную муфту совмещают с насосом привода колес и питания догружателя ведущих колес с возможностью закономерного согласования процессов силового регулирования трансмиссии и силового регулирования навесного орудия. Это исключает недостатки силовых регуляторов скорости и навесного орудия и приспосабливает движители к местности, так как движители догружаются их же приводом. Это исключает необходимость в специальных усилителях гидроувеличителей сцепного веса и сложных блоков электронного управления без учета закономерностей зависимости параметров привода и регулирования орудия. Введение рессорной подвески одновременно в процессы силового регулирования орудия, догрузки ведущих колес, получения информации об изменении соотношений сил тяги и тяжести обеспечивает приспособляемость агрегата к изменению нагрузки и условиям местности, что более важно для пересеченной местности. Соединение трансмиссии с механизмом регулирования догрузки ведущих колес способствует обеспечению саморегулируемости расширению пределов регулирования привода и орудия, догрузки ведущих колес на основе закономерной зависимости процессов. Способ и система управления агрегатом могут использовать информацию о скорости, буксовании и об изменении сил тяги и тяжести для выработки сигнала управления электронной системой управления. Такая система может управлять двигателем, трансмиссией и навесным орудием на основе закономерной связи процессов формирования скоростного и нагрузочного режимов с процессами корректирования нагрузки на ведущие колеса и догрузки колес при силовом, позиционном и комбинированном управлении.
Исходная информация датчиков скорости 1, положения орудия, давления и соотношения сил тяги и тяжести анализируется и формируются указания к действию исполнительных механизмов, как это показано на блок-схемах (фиг. 6 и 7). Система включает накопление энергии при торможении и расход при перегрузке. Этот процесс характеризуют блоки 68, 69, 71, 72. Когда нагрузка ниже нуля, блок 68 на выходе ДА дает сигнал накопления энергии генератором, электролизером и баллонами. Когда это условие не соблюдается, на выходе НЕТ блока 68 формируется сигнал блоку 69 для сравнения нагрузки двигателя с оптимальной и определения сигнала ДА перегрузки для включения дозатора водорода и водородного питания до преодоления перегрузки, исключения торможения заслонкой 7 и генератором 16 до приближения нагрузки к значению оптимальной мощности. Способ допускает корректирование реакций и сопротивления орудия за пределами такого регулирования, когда электронный блок управления использует сигнал о коэффициенте тяги, сравнивает с коэффициентами эффективности тяги и утилизации и формирует сигнал для коррекции скорости, глубины почвообработки и догрузки ведущих колес, как это показано на фиг. 7. При отклонении коэффициента тяги от значения коэффициентов эффективности тяги в тяговом режиме и коэффициента эффективности утилизации в тормозном режиме, как это показано блоками 74, 75, 76, формируется сигнал для коррекции скорости, догрузки и глубины почвообработки или продолжения работы. В случае неисправности систем вступает тормозная система. Во всех других случаях торможение колес снижается, энергия торможения утилизируется и используется для управления навесной машиной и формирования оптимального режима работы с учетом догрузки колес.
При использовании предложенного способа и системы управления сельскохозяйственным агрегатом в степной и горной зонах повышается экономичность и приспособляемость к изменению нагрузки, расширяются пределы бесступенчатого регулирования скорости движения в тяговом и тормозном режимах, согласовывается работа орудия, трансмиссии и двигателя с догружателем ведущих колес. Догружение ведущих колес без специального усилителя и без дросселирования жидкости снижает потери энергии более трех киловатт непрерывно при работе с орудием, требующим много энергии. Накопление энергии при движении на уклоне, для повышения мощности на подъемах, при работе в горной зоне снижает энергозатраты и существенно облегчает управление.
Использование: изобретение относится к средствам управления самоходным агрегатом при передвижении по пересеченной местности. Сущность изобретения: система управления содержит средства регулирования скорости в тяговом и тормозном режимах, гидрообъемную трансмиссию, систему навески с гидроцилиндром. Полости гидроцилиндра сообщены через гидрораспределитель с напорной и сливной гидролиниями гидрообъемной трансмиссии, а рессора подвески ходовой части связана с гидроцилиндром системы навески. 7ил.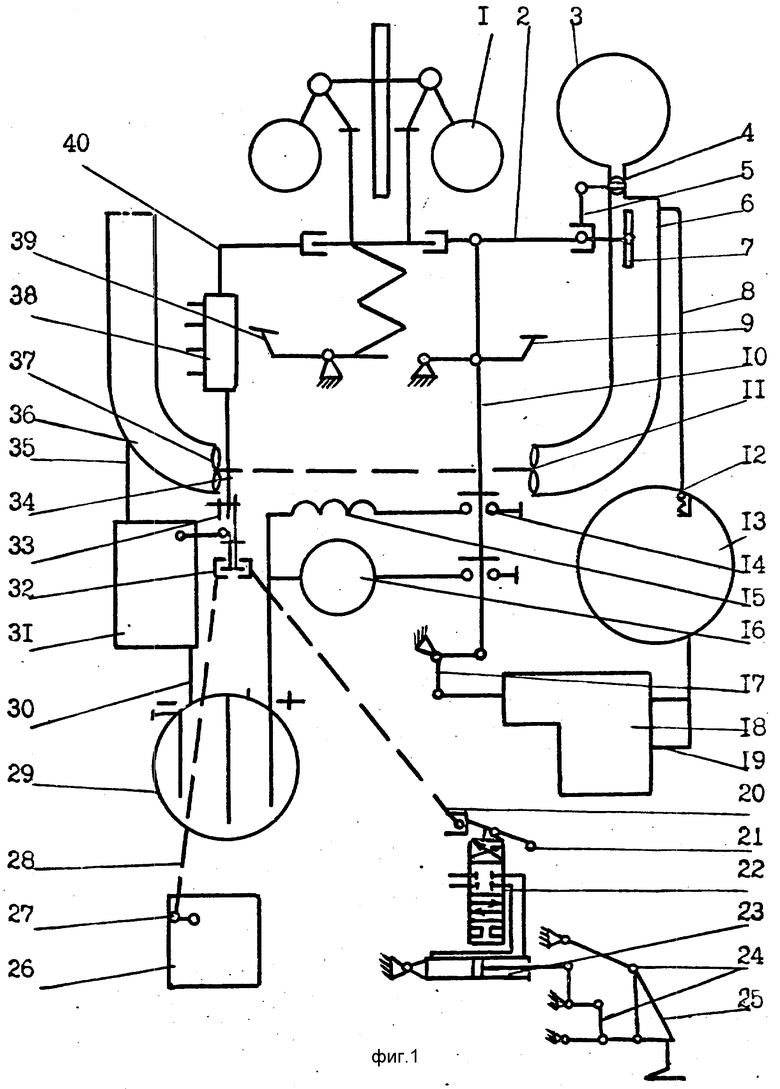
Система управления агрегатом на пересеченной местности, содержащая средства регулирования скорости в тяговом и тормозном режимах, включающее в себя регулятор скорости дизеля, гидрообъемную трансмиссию, ходовую часть, механизм навески с гидрораспределителем и гидроцилиндром управления навесным орудием, отличающаяся тем, что она снабжена догружателем ведущих колес, ходовая часть выполнена с рессорной подвеской, полости гидроцилиндра подъема навесного орудия подключены через гидрораспределитель соответственно к напорной и сливной гидролиниям гидрообъемной трансмиссии, регулятор скорости дизеля связан с гидрораспределителем, при этом рессора подвески ходовой части связана с гидроцилиндром механизма подъема навесного орудия устройством, включающим в себя регулятор длины тяги, связанной с рессорой, кинематически связанный тягами с гидроцилиндром подъема навесного орудия.
| Ксеневич И.П | |||
| Облицовка комнатных печей | 1918 |
|
SU100A1 |
| - М.: Агропромиздат, 1986, с | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
