Изобретение относится к машиностроению, в частности к промышленным роботам и манипуляторам для различных отраслей народного хозяйства и может быть использовано при погрузочно-разгрузочных операциях.
Известны манипуляторы, содержащие диски, гибкие тяги, упругие элементы между дисками.
Наиболее близким по технической сущности и получаемому результату является манипулятор для перегрузки крупногабаритных заготовок, содержащий каретку, телескопическую руку, механизм подъема руки, поворота руки, схват. Недостатком данного манипулятора является большое количество элементов (деталей) 38; сложность привода выдвижения руки, наличие момента трения в винтовых парах; неточность позиционирования за счет наличия шарнира.
Задачей изобретения является упрощение конструкции манипулятора, повышение надежности за счет снижения числа элементов с 38 в аналоге до 6 в заявляемом.
Технический результат достигается тем, что каждая секция телескопической руки снабжена винтовой конической пружиной, а механизм подъема груза выполнен в виде одного гибкого элемента (например, троса), закрепленного одним концом на последней подвижной секции руки, другим на барабане и проходящего по центральной оси руки.
На чертеже изображен манипулятор. Устройство содержит основание 1, телескопическую руку, состоящую из секций 2, гибкий элемент в виде троса 3, барабан 4, пружины 5, захват 6.
Манипулятор работает следующим образом. При намотке на барабан 4 троса 3 втягиваются секции 2 одна в другую до требуемого положения, накапливается кинетическая энергия в пружинах 5, которые после позиционирования захвата 6 позволяют опустить его при снятии усилия с барабана 4.
Высота подъема и опускания руки обеспечена наматыванием или разматыванием троса 3 на барабан 4 и действием пружин 5.
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1986 |
|
SU1505774A1 |
| УСТАНОВКА ДЛЯ ВЛАГОТЕПЛОВОЙ ОБРАБОТКИ СЫПУЧИХ ПРОДУКТОВ | 2001 |
|
RU2186510C1 |
| УСТРОЙСТВО ДИЭЛЕКТРИЧЕСКОГО НАГРЕВА СЫПУЧИХ МАТЕРИАЛОВ | 2001 |
|
RU2187908C1 |
| ВАКУУМ-СУБЛИМАЦИОННАЯ СУШИЛКА НЕПРЕРЫВНОГО ДЕЙСТВИЯ НА ИНЕРТНЫХ НОСИТЕЛЯХ | 2000 |
|
RU2169323C1 |
| ВАРОЧНО-СУШИЛЬНЫЙ АППАРАТ ДЛЯ ПРОИЗВОДСТВА КРУПЯНЫХ КОНЦЕНТРАТОВ | 2000 |
|
RU2169490C1 |
| СТРУЙНЫЙ ЗАХВАТ | 1995 |
|
RU2090352C1 |
| ВАКУУМ-СУБЛИМАЦИОННАЯ СУШИЛКА НЕПРЕРЫВНОГО ДЕЙСТВИЯ ДЛЯ СЫПУЧИХ И ГРАНУЛИРОВАННЫХ ПРОДУКТОВ | 1996 |
|
RU2119624C1 |
| ФРИКЦИОННАЯ ЦЕНТРОБЕЖНАЯ МУФТА | 1999 |
|
RU2148739C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ ПЛАСТИН | 1997 |
|
RU2131155C1 |
| ФРИКЦИОННАЯ МУФТА | 1999 |
|
RU2153608C1 |
Изобретение относится к машиностроению и предназначено для использования в промышленных роботах, применяемых для погрузочно-разгрузочных операций по укладке штучных изделий. Манипулятор содержит основание 1, телескопическую руку с винтовыми коническими пружинами 5, снабженную механизмом подъема груза, выполненным в виде одного гибкого элемента (например троса). Трос 3 закреплен одним концом на последней секции руки, а другим - на намоточном барабане. При этом трос протянут по центральной оси секции руки. 1 ил.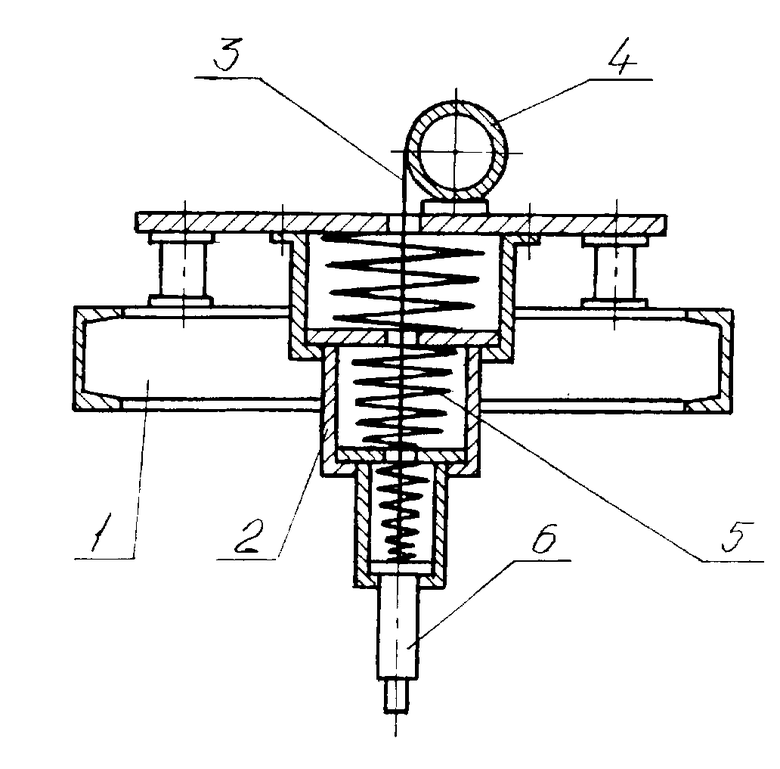
Манипулятор, содержащий основание, телескопическую руку, механизм подъема груза и схват, отличающийся тем, что каждая секция телескопической руки снабжена винтовой конической пружиной, а механизм подъема груза выполнен в виде расположенного на основании барабана и одного гибкого элемента, закрепленного одним концом на последней подвижной секции телескопической руки, а другим на барабане и проходящего по центральной оси руки.
| Манипулятор для перегрузки крупно-гАбАРиТНыХ зАгОТОВОК | 1979 |
|
SU846268A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
