m ||
ел
о ел
4;
I Изобретение относится к области маши- |11остроения и может быть испо;1ьзовано для г|1еханизации погрузочно-разгрузочных работ t|ia операциях транспортировки и склади- 11)ования грузов.
се. Для контроля плосности укладки груза на каретке 12 установлен датчик 23, взаимодействующий с флажком 24. Для остановки привода горизонтального перемещения и контроля усилия прижатия
I Цель изобретения - расширение тех- ящиков на кронштейне 8 установлен дат- нологических возможностей за счет обес-чик 25. Путевой датчик 26 также установлен на монорельсе. Все датчики подключены к системе управления робота.
Промышленный робот работает следующим образом.
Как только груз, например пара ящиков, подойдет под захватное устройство, фотоэлемент, установленный на рольганге.
печения контроля усилия поджатия объекта U установочной плоскости.
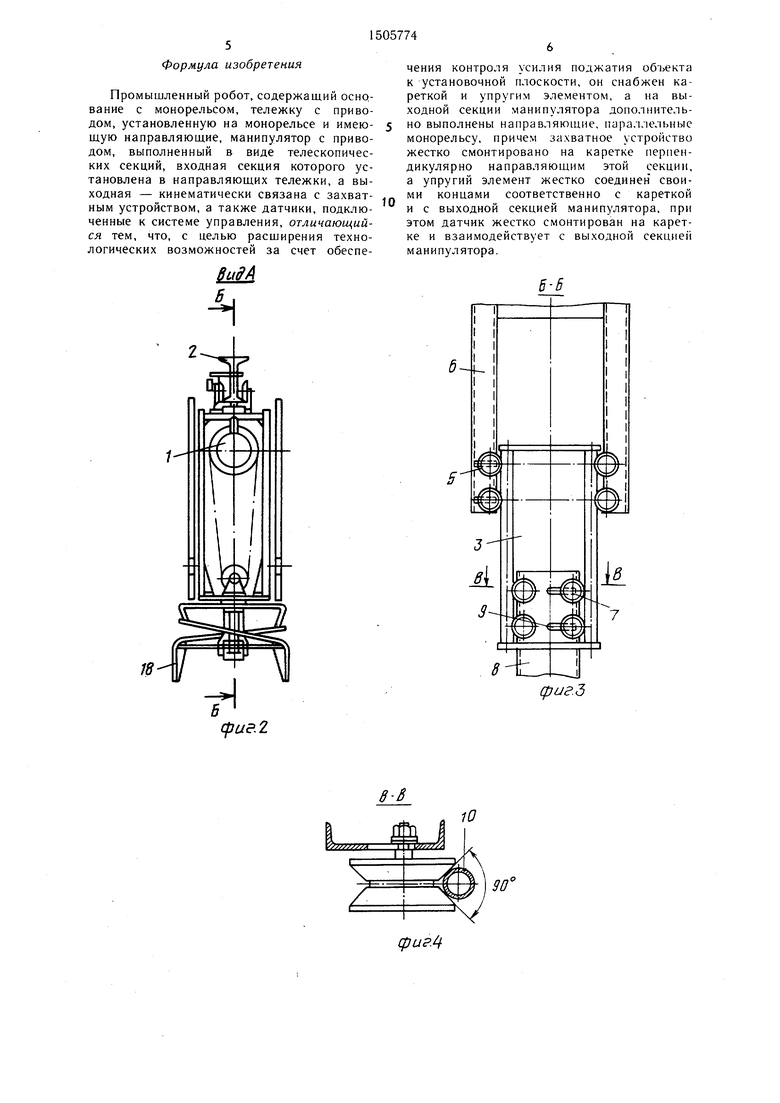
На фиг. 1 изображен промьииленный )обот, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; л фиг. 4 - разрез В-В на фиг. 3; на фиг. 5 - разрез Г-Г на фиг. 1. I Промышленный робот состоит из тележ(и 1, в качестве которой может быть ис- посылает сигнал в систему управления юльзован стандартный тельфер. Механизмробота. При этом трос тележки 1 опус1ередвижения с помощью приводных колескает вниз манипулятор с выходной сек еремещает тележку по монорельсу 2 от цйей. Наличие пазов 5 и 9 дает возмож- фиемного рольганга к поддону. Меха-ность убрать люфт в кинематических
1ИЗМ подъема, наматывая трос на подъем-парах. Одновременно пере1лещается вниз
/ый барабан, перемещает манипулятор 3, 2 захватное устройство, установленное на 5ыполненный в виде телескопических сек-каретке 12, находящейся на направляющих 11 выходного звена манипулятора. Захватное устройство зажимает объект (ящики). Включается механизм подъема. Как
|ий. Телескопические секции манипулятора подвижно установлены друг относительно Круга с 1юмоп1,ью роликов 4, одна пара
|которых установлена в пазах 5, а одна - тг только захватное устройство поднимается
естко на стойках 6, установленных на |гележке, а также с помощью роликов 7, установленных на кронштейне 8 выходной Ьекции манипулятора, причем одна пара роликов 7 установлена в пазах 9. Все
в верхнее положение, срабатывает датчик 21. Тележка перемещается по монорельсу 2 в направлении поддона. Датчик 22 останавливает тележку и лает сигнал на опускание захватного устройства 18. Как
ролики выполнены профилированными с уг-30 только захватное устройство 18 с ящикарюм профиля 90°. Между парами роли-ми опустится до уровня поддона, срабаJKOB 4 и 7 установлена промежуточнаятывает датчик 23 касания от флажка 24,
секция 10 манипулятора с направляю-закрепленного на подвижной части захватщими. На выходном звене манипулятораного устройства. При этом захватное устракреплены направляющие 11 механизмаройство не ракрывается, в систему управ|неремещения захватного устройства, на ко-35 ления подается сигнал на кратков ремен|торых установлена каретка 12, снабженнаяцый подъем объекта, а затем на пере|четырьмя парами роликов, причем две па-мещение тележки по монорельсу 2 до
|ры роликов профилированы по наружнойупора в вертикальную стенку поддона,
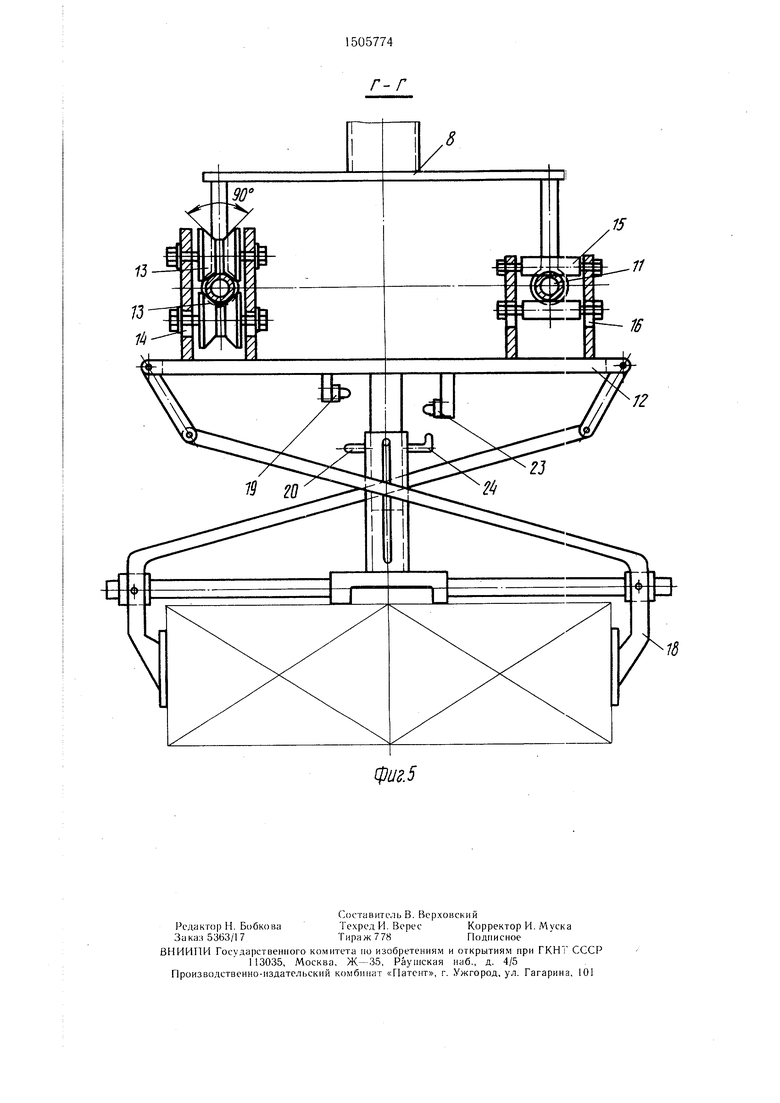
поверхности. Пара нижних роликов 13 ус-При этом каретка 12 останавливается,
{тановлена в пазах 14. Две другие пары а тележка продолжает пеэемещаться по
роликов 15 выполнены гладкими, причем inapa нижних роликов 15 установлена в па- ;зах 16. Параллельно направляющим И установлен упругий элемент 17, выполнен- ;ный в виде пары регулируемых пружин,
монорельсу, что приводит к растяжению упругого элемента, выполненного в виде пружин 17, так как один его конец закреплен на каретке 12, а другой - на торце кронц тейна выходной секции манипуодин конец которых закреплен на карет- дЗ лятора. Натяжение пружин обеспечивает
|ке 12, а другой - на выходной сек- :ции манипулятора. На каретке 12 жестко закреплено захватное устройство 18, выпол- ненное в виде клещевого схвата автома- ;тического действия, установленное с возплотную укладку ящиков к упорной стенке поддона. Одновременно срабатывает датчик 25 и дает сигнал на остачовку тележки. Захватное устройство 18 опускается, раскрывается, оставляя ящики на поддоне. После
;можностью захвата груза в плоскости, 50 этого манипулятор перемешается в исход- М1ернендикулярной направлению движения цое положение и продолжает выполнение :тележки. Для определения момента раскры- :тия схвата на каретке 12 закреплен дат- чик 19, взаимодействующий с флажком 20, ; расположенным на подвижной части захват- ; ного устройства. Для остановки захват- 55 :ного устройства в крайнем верхнем иоло- жении на стойках 6 закреплен датчик 21. Путевой датчик 22 закреплен на монорельоперацин.
Таким образом, настройка упругого элемента на определенное усилие обеспечивает совместно с датчиком 25 осуществление контроля усилия при установке объекта, что повышает надежность транспортировки и хранения груза.
се. Для контроля плосности укладки груза на каретке 12 установлен датчик 23, взаимодействующий с флажком 24. Для остановки привода горизонтального перемещения и контроля усилия прижатия
ящиков на кронштейне 8 установлен дат- чик 25. Путевой датчик 26 также усПромышленный робот работает следующим образом.
Как только груз, например пара ящиков, подойдет под захватное устройство, фотоэлемент, установленный на рольганге.
посылает сигнал в систему управления робота. При этом трос тележки 1 опусв верхнее положение, срабатывает датчик 21. Тележка перемещается по монорельсу 2 в направлении поддона. Датчик 22 останавливает тележку и лает сигнал на опускание захватного устройства 18. Как
только захватное устройство 18 с ящикамонорельсу, что приводит к растяжению упругого элемента, выполненного в виде пружин 17, так как один его конец закреплен на каретке 12, а другой - на торце кронц тейна выходной секции манипуплотную укладку ящиков к упорной стенке поддона. Одновременно срабатывает датчик 25 и дает сигнал на остачовку тележки. Захватное устройство 18 опускается, раскрывается, оставляя ящики на поддоне. После
этого манипулятор перемешается в исход- цое положение и продолжает выполнение
операцин.
Таким образом, настройка упругого элемента на определенное усилие обеспечивает совместно с датчиком 25 осуществление контроля усилия при установке объекта, что повышает надежность транспортировки и хранения груза.
Формула изобретения
Промышленный робот, содержащий основание с монорельсом, тележку с приводом, установленную на монорельсе и имеющую направляющие, манипулятор с приводом, выполненный в виде телескопических секций, входная секция которого установлена в направляющих тележки, а выходная - кинематически связана с захватным устройством, а также датчики, подключенные к системе управления, отличающийся тем, что, с целью расширения технологических возможностей за счет обеспе
чения контроля усилия поджатия объекта к установочной плоскости, он снабжен кареткой и упругим элементом, а на выходной секции манипулятора дополнительно выполнены направляющие, параллельные монорельсу, причем захватное устройство жестко смонтировано на каретке перпендикулярно направляющим этой секции, а упругий элемент жестко соединен своими концами соответственно с кареткой и с выходной секцией манипулятора, при этом датчик жестко смонтирован на каретке и взаимодействует с выходной секцией манипулятора.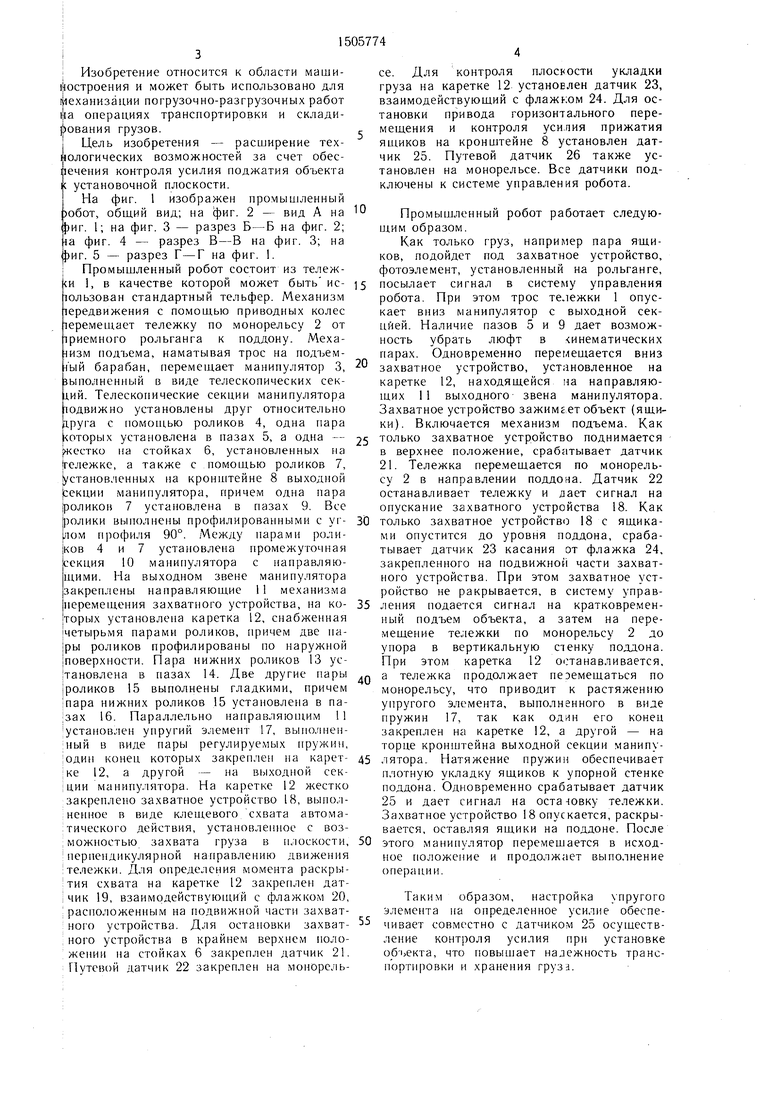
Изобретение относится к машиностроению и может быть использовано для механизации погрузочно-разгрузочных работ на операциях транспортировки и складирования грузов. Цель изобретения - расширение технологических возможностей за счет обеспечения контроля усилия поджатия объекта к установочной плоскости. Перемещением тележки 1 по монорельсу 2 манипулятор 3, выполненный в виде телескопических секций, выводится в зону выполнения работ. Выходная секция манипулятора опускается и перемещает вниз захватное устройство 18, которое раскрывается и зажимает объект. После транспортировки объекта к месту складирования и установки его на поддон системой управления выдается сигнал на кратковременный подъем захватного устройства, а затем на перемещение тележки до упора объекта в вертикальную стенку поддона. При этом каретка 12, установленная в направляющих 11 выходной секции манипулятора, останавливается, а тележка, продолжая движение по монорельсу, растягивает упругий элемент 17, один конец которого закреплен на каретке 12, а другой - на выходной секции манипулятора. Срабатывание датчика 25 означает достижение требуемого усилия установки объекта, что обеспечивает необходимую плотность укладки груза. После раскрытия захватного устройства происходит перемещение манипулятора в исходное положение. 5 ил.
фиг.5
сригА
15
13
lit
15
11
16
| Манипулятор | 1975 |
|
SU536003A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
