Изобретение относится к робототехнике и касается манипулятора для перегрузки крупногабаритных заготовок
Известен манипулятор для перегрузки крупногабаритных заготовок с перемещающейся по подвесным путям кареткой, многосекционной телескопической выдвижной рукой, а также с механизмами поворота и выдвижения руки и схватов 1 .
Однако данный манипулятор характеризуется недостаточной надежностью работы и большими габаритными размерами..
Цель изобретения - повышение надежности работы манипулятора за счет исключения возможности заклинивания в телескопических винтовых парах и уменьшение его габаритов.
Указанная цель достигается тем, что внутри телескопической руки смонтированы телескопические винтовые пары, причем на противоположных концах каждого винта имеются жесткие выступы, контактирующие при крайних положениях винтов с соответствующими выступами, выполненными в виде пружин скручивания и размещенными :на ПРОТИВОП02ПОЖНЫХ концах каждой гайки, крайний же внутренний винт с
соответствующей секцией руки соединен шарнирно и подвижно в вертикальной плоскости посредством подпружиненной втулки с буртом, контактирующей в своем нижнем положении с конечным выключателем реверса хода телескопической руки.
Манипулятор применяется например/ в составе линии и осуществляет группо10вую перегрузку заготовок с питгцощего конвейера на наклонный приемный лоток технологического оборудования, либо в межоперационную тару и обратно.
15
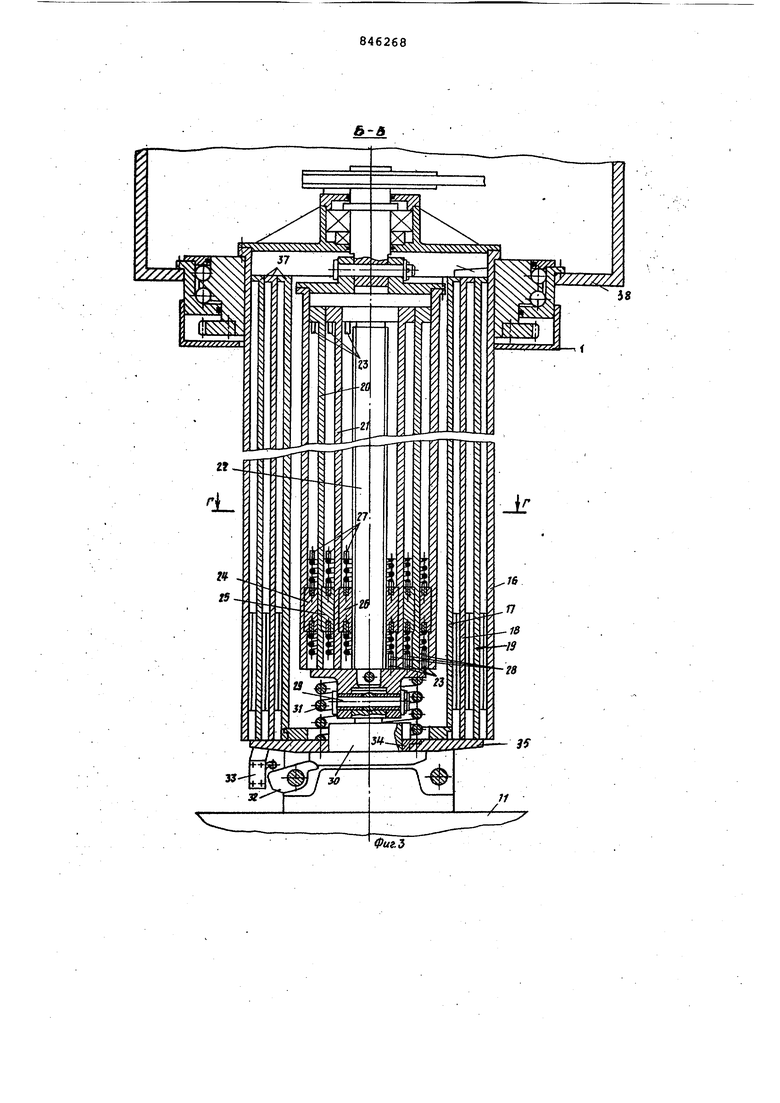
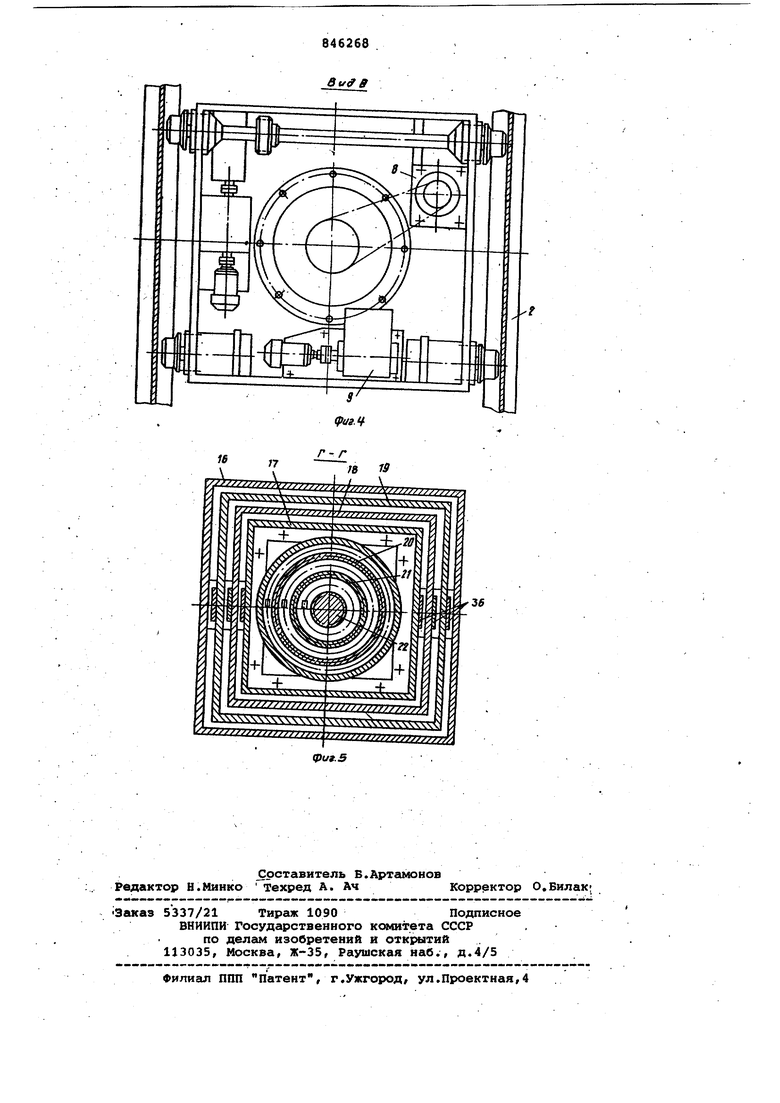
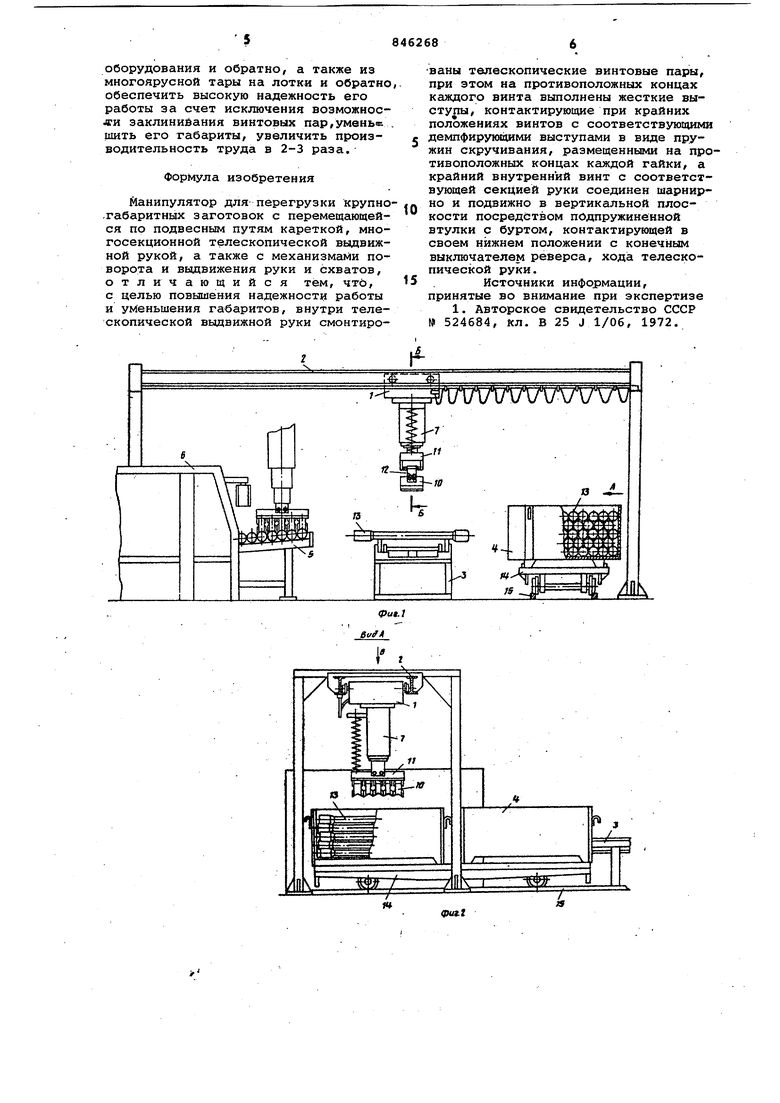
На фиг.1 изображен манипулятор, общий вид; на фиг.2 - вид А на фиг.1; на фиг.3 - разрез Б-Б на фиг.1) на фиг.4,- вид В на фиг.2. на фиг.5 - разрез Г-Г на фиг.З.
Манипулятор состоит из каретки 1
20 (фиг.1), перемещающейся по подвесным путям 2, которые проходят над питающим конвейером 3, тарой 4 и приемным лотком 5 технологического оборудова25ния б, телескопической руки 7, механизма 8 выдвижения руки (фиг.4), механизма 9 поворота руки и магнитных схватов 10 (фиг.1), смонтированншх на траверсе 11 на проушинах 12 с .возможностью свободного хода. Тара 4
30
с заготовками 13, либо порожняя тара в зависимости от режима работы линии устанавливается на двухпозиционную приводную тележку 14 (фиг.2), перемещающуюся по путям 15. Телескопическая рука 7 выполнена многосекционной и имеет коробчатую форму. Корпус 16 , (фиг.З) телескопической руки 7 установлен на поворотном круге каретки 1/ а внутри корпуса смонтированы подвижные секции 17-19. Внутри секции 17 размещены телескопические винты 20-22. На противоположных концах каждого винта выполнены жесткие выступы 23, а на противоположных конца гаек 24-26 смонтированы соответствующие демпфирующие выступы 27 и 28, выполненные в виде пружин скручивания. Корпус гайки 24 в своей верхней части жестко соединен с приводом механизма 8 выдвижения руки, а винт 22 в своей нижней части связан с секцие 17 посредством шарнира 29, который в свою очередь.закреплен на подвижной втулке 30, подпружиненной пружиной 31. Втулка 30 в своей нижней части имеет бурт, контактирующий через коромысло 32 с конечным выключателем .33 реверса хода телескопической руки и от проворота удерживания шпонками 34, закрепленными на раме 35 секции 17. Подвижные секции 17-19 от проворота относительно друг друга удерживаются с помощью направляющих 36, а упоры 37 и 38 на секциях ограничивают их продольное перемещение.
Манипулятор работает следующим образом.
Манипулятор, применяемый, наприме в составе линии, осуществляет групповую перегрузку заготовок и работает в трех режимах: перегружает заготовки питающего конвейера 3 на наклонный приемный лоток 5 технологического оборудования, перегружает заготовки с конвейера в межопёрационную тару 4, размещенную на двухпозиционной тележке 14, при неработающем технологическом оборудовании, причем заготовки 13 в тару укладываются манипулятором многоярусно в шахматном порядке. После заполнения тары ее транспортируют на накопительный склад, перегружают заготовки из тары на приемный лоток 5 при неработающем технологическом оборудовании, питающем конвейер 3. В этом случае тара с заготовками вызывается с накопительного склада и помещается на двухпозиционную тележку.
Манипулятор находится в исходном положении над конвейером 3, ожидая команду на включение. При получении сигнала о налияии на конвейере пяти заготовок включается привод механизма 8 вьщвижения .руки. При этом ввиду того, что момент трения в винтовых парах различного дис1метра раздтичен, начнет вывинчиваться винт 22,у которого момент трения меньше. Вывинчиваясь, винт 22 перемещается вниз до встречи жесткого выступа 23 с демпфирующим выступом 27 гайки 26. Демпфируюпщй выступ мягко воспринимает удар жесткого выступа (скорость удара может достигать несколько метров в секунду, а также постоянно создаёт расклинивающий эффект, т.е. препятствует заклиниванию, которое возникает при затягивании самотормозящейся винтовой пары. -Таким образом, жесткий выступ 23 винта 22, .достигнув демпфирующего выступа 27 гайки 26, останавливает вращение гайки 26, жестко закрепленной на винте 21. Винт 21 начинает, в свою очередь тоже вывинчиваться до встречи соответствующего выступа винта с выступом гайки 25, после чего вывинчивается и винт 20. Так поочередно вывинчиваясь, винты перемещают вниз руку с траверсой 11-и со схватами 10 до встречи с заготовками 13. Достигнув заготовок схваты, траверса и секция 17 руки 7 прекращают движение в то время как винты 20-22 продолжают вывинчиваться. Вывинчиваясь, они преодолевают усилие пружины 31 и перемещают втулку 30 вниз до контакта ее с коромыслом 32, которое воздействует на конечный выключатель 33 включающий реверс хода телескопической руки. Наличие подобной подвижной подпружиненной втулки исключает возникновение аварийной ситуации при контакте секций руки со случайными предметами, оказавшимися в зоне выдвижения руки, а наличие шарнира 29 в месте крепления винта 22 с подпружиненной втулкой позволяет предохранить телескопический винт от действи радиальных нагрузок, а значит и от заеданий, которые могут возникнуть вследствие Этого в винтовой паре, особенно при полностью выдвинутой руке. При реверсе, т.е. при подъеме руки вверх телескопические винты начинают поочередно ввинчиваться в соответствующие гайки, подвижная втулка возвращается в свое верхнее положение и своим буртом подхватывает раму 35 секции 17, перемещают траверсу со схватами и захваченными заготовками до верхнего исходного положения. Затем дается команда на перемещение манипулятора к позиции над приемным лотком 5 и на поворот руки манипулятора на 90°. Поместив заготовки на лоток 5 технологического оборудования 6 манипулятор возвращается в исходное положение над конвейером.
Предлагаемая конструкция манипулятора позволяет осуществить автоматизацию процесса групповой и поштучной перегрузки и транспортировки ,крупных заготовок с конвейеров на наклонные лотки технологического
оборудования и обратно, а также из многоярусной тары на лотки и обратно обеспечить высокую надежность его работы за счет исключения возможности заклинивания винтовых пар,уменьа: шить его габариты, увеличить производительность труда в 2-3 раза.
Формула изобретения
Манипулятор для перегрузки крупно,габаритных заготовок с перемещающейся по подвесным путям кареткой, многосекционной телескопической выдвижной рукой, а также с механизмами поворота и вьщвижения руки и схватов, отличающийся тем, что, с целью повышения надежности работы и уменьшения габаритов, внутри телескопической выдвижной руки смонтированы телескопические винтовые пары, при этом на противоположных концах каждого винта выполнены жесткие выступы, контактирующие при крайних положениях винтов с соответствующими демпфирующими выступами в виде пружин скручивания, размещенными на противоположных концах каждой гайки, а крайний внутренний винт с соответствующей секцией руки соединен шарнирно и подвижно в вертикальной плос0кости посредством подпружиненной втулки с буртом, контактирующей в своем нижнем положении с конечным выключателем реверса, хода телескопической руки.
5
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 524684, Кл. В 25 J 1/06, 1972, fg TvymrumTvv u
г- г
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1983 |
|
SU1098786A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК | 1990 |
|
RU2023572C1 |
| Автоматическая линия | 1985 |
|
SU1296373A1 |
| Устройство для переноса заготовок между позициями обрабатывающей машины | 1985 |
|
SU1301529A2 |
| Захват манипулятора | 1984 |
|
SU1202865A1 |
| Автоматизированная линия изготовления крутоизогнутых отводов | 1989 |
|
SU1708475A1 |
| МАНИПУЛЯТОР | 1995 |
|
RU2090353C1 |
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |
| Устройство для подачи заготовок | 1988 |
|
SU1576276A1 |
| Устройство для размещения штучных заготовок | 1987 |
|
SU1473885A1 |