Изобретение относится к авиационной технике и может быть использовано в системах дозаправки самолетов топливом в полете.
Изобретение также может быть использовано в случаях, когда необходимо контролировать изменение расстояний между подвижными объектами, например между самолетами при полете в строю, между взлетно-посадочной полосой (ВПП) и самолетом при его приземлении, между речными и/или морскими судами при проходе в узких проливах или каналах, и т.п.
Дозаправку самолетов в полете осуществляют с целью увеличения дальности полета или времени нахождения в воздухе. На заправляемом самолете имеется топливоприемник (штанга с наконечником), а на самолете-заправщике топливный насос и барабан с гибким шлангом, на конце которого укреплен заправочный конус. Перед дозаправкой в полете на самолете-заправщике выпускают шланг с конусом. Заправляемый самолет пристраивают к заправщику и вводят топливоприемник в конус, где он фиксируется замком. Затем включают насос для перекачки топлива из баков заправщика в баки заправляемого самолета. Практическое выполнение дозаправки самолетов в полете требует высокого мастерства летчиков (Советская военная энциклопедия, М. Воениздат, 1977, т.3, с. 220-221)
Наиболее ответственной операцией дозировки самолета в полете является стыковка топливоприемника с конусом. Ее выполнение зависит от точности совмещения осей топливоприемника и конуса, а также выдерживания в процессе контактирования скорости полета заправляемого самолета в строго определенном диапазоне ее изменений. При этом все внимание летчика заправляемого самолета сосредоточено только на взаимном расположении конуса и топливоприемника и одновременном управлении тягой двигателя и пространственным положением самолета.
В процессе контактирования, т.е. сближения топливоприемника с конусом с дистанции 15-10 м до 0, необходимо обеспечить точное управление самолетом по трем линейным координатам и скоростью сближения с самолетом-заправщиком при отсутствии на борту систем измерения и индикации указанных параметров. При этом точность выдерживания координат конуса должна быть не хуже 0,3 0,4 м, а скорость сближения должна быть выше на 1-2 м/с, чем скорость самолета-заправщика (конуса).
Промах топливоприемника может привести к соударению конуса (масса которого 45-60 кг) с корпусом самолета, вследствие чего могут быть повреждения как конуса, так и корпуса самолета, в частности, разрушение радиопрозрачного обтекателя.
При скорости сближения меньшей, чем требуемая и попадании топливоприемника в конус не срабатывает замок конуса, вследствие чего увеличивается время контактирования за счет повторной (повторных) попытки стыковки, происходит раскачка заправляемого самолета в возмущенном заправщиком потоке. При скорости сближения большей, чем требуемая, процесс становится слишком быстротечным и летчик не успевает точно навести топливоприемник на конус, а при попадании в него происходит сильный толчок (удар) по конусу, что приводит к колебательному движению шланга ("эффект хлыста") и раскачке конуса в вертикальной плоскости, вследствие чего может произойти разрушение (облом) топливоприемника.
Поэтому успешная стыковка заправочных устройств (конуса и топливоприемника) при дозаправке в полете в определяющей мере зависит от мастерства и физиологического состояния летчика заправляемого самолета.
Для отработки навыков в технике пилотирования, включая работу с двигателями при дозаправке в полете, на каждого летчика требуется не менее 10 тренировочных полетов с заправщиком без перекачки топлива, после чего вероятность контактирования достигает 0,6 0,95. Однако это связано со значительными материальными и финансовыми расходами на подготовку летного состава и не гарантирует 100-процентное контактирование с первого захода.
Снижение требований к мастерству летчиков является основной проблемой практического выполнения дозаправки самолетов в полете, чем и определяется развитие систем дозаправки. При этом наблюдается тенденция создания систем с управляемым заправочным конусом.
Известен способ управления взаимным расположением конуса и топливоприемника, при котором с заправляемого самолета излучают съюстированный с осью топливоприемника луч света, принимают его на конусе, определяют угловое рассогласование между осями конуса и топливоприемника, формируют сигналы управления пространственным положением конуса, которые подают на исполнительные органы управления пространственным положением конуса (заявка РСТ N WO 91/06471, 1991, В 64 D 39/00, G 01 S).
Причиной, препятствующей достижению указанного ниже технического результата при использовании известного способа, является отсутствие у летчика заправляемого самолета информации о скорости сближения топливоприемника с конусом, что может явиться причиной неудачной стыковки заправочных устройств.
Известен способ управляемой стыковки конуса с топливоприемником, при котором с заправляемого самолета в сторону конуса излучают съюстированные с осью топливоприемника пучки света в виде четырех ортогонально направленных лучей, принимают их на конусе, определяют угловое отклонение в вертикальной и горизонтальной плоскостях оси конуса от оси топливоприемника, формируют управляющие сигналы и перемещают конус в вертикальной и горизонтальной плоскостях, минимизируя тем самым величину отклонения оси конуса от оси топливоприемника (патент США N 5326052, 1994, кл. 244-135 А, B 64 D 39/00).
Описанный способ позволяет обеспечить достаточную точность управления положением конуса относительно топливоприемника. Причина, препятствующая достижению указанного ниже технического результата при использовании известного способа, заключатся в том, что пространственная стабилизация конуса относительно топливоприемника недостаточна для успешного контактирования с первого захода. При этом необходимо еще обеспечить управление скорости сближения заправляемого самолета с конусом в оптимальном режиме. Однако прямую или косвенную информацию о скоростных параметрах сближения летчик заправляемого самолета не получает. При визуальном наблюдении конуса на дистанциях от 15-10 до 5-3 метров летчику трудно соотнести направления векторов скоростей конуса и самолета, а его ошибка в оценке скорости сближения может быть весьма значительной. Поэтому известный способ не исключает упомянутых ранее негативных последствий.
Основной задачей, на решение которой направлено заявленное изобретение, является упрощение процесса дозаправки самолетов в полете за счет обеспечения летчика заправляемого самолета визуальной информацией о скоростных параметрах сближения самолета с заправочным конусом, что повышает вероятность дозаправки с первого захода в любое время суток (особенно в условиях вечерних сумерок и ночи), и снижает требования к квалификации летчиков.
Технический результат, достигаемый при осуществлении заявленного изобретения, заключается в повышении точности наведения топливоприемника на центр конуса и управления скоростью сближения заправляемого самолета с конусом в процессе контактирования.
Указанный технический результат при осуществлении изобретения достигается тем, что в известном способе дозаправки самолетов в полете, включающем излучение в заправляемого самолета в сторону заправочного конуса съюстированных с осью топливоприемника пучков света, пучки света формируют в виде двух боковых и одного среднего лучей красного цвета, яркость излучения среднего и одного из боковых лучей модулируют в противофазе прямоугольными импульсами с частотой 3-5 Гц, на дистанции 15-10 м до конуса уравнивают скорость заправляемого самолета со скоростью самолета-заправщика, совмещают лучи с контуром так, что средний луч освещает его центральную часть, а боковые лучи его юбку в диаметрально противоположных точках ее поверхности, после чего по заданной программе боковые лучи синхронно разводят от исходного положения на одинаковые углы и управляют самолетом в горизонтальной и вертикальной плоскостях и скоростью его сближения с конусом так, чтобы боковые лучи не выходили за пределы ширины юбки конуса.
Боковые и средний лучи в поперечном сечении имеют форму, близкую к вытянутым прямоугольника, при этом сечения боковых лучей параллельны между собой и перпендикулярны сечению среднего луча.
Программное синхронное разведение боковых световых лучей от исходного положения осуществляют на одинаковые углы, определяемые в соответствии с зависимостью:
α = arctg (Rk/l),
где Rk радиус фронтальной проекции конуса,
l расстояние между заправляемым самолетом (топливоприемником) и конусом.
Укажем на причинно-следственные связи отличительных признаков способа и технического результата. Формирование диаграммы светового излучения в виде двух параллельных боковых и поперечного им среднего луча, совмещение световых лучей с контуром конуса, при котором боковые световые пятна помещают на юбке конуса, а среднее световое пятно в его центральной части, обеспечивает точность наведения топливоприемника на центр конуса. При этом модуляция среднего и одного из боковых световых лучей, помимо улучшения различимости световых пятен обеспечивает дополнительную информацию о положении световых пятен относительно центра конуса. Удержание конфигурации световых пятен на конусе в неизменном виде в процессе контактирования вынуждает летчика заправляемого самолета поддерживать скорость сближения с конусом, близкой к оптимальной. Это обусловлено тем, что скорость синхронного разведения боковых световых лучей от исходного положения жестко связана с изменением расстояния до конуса (производная расстояния равна скорости сближения) и осуществляется по заданной программе, не зависящей от воли летчика.
Таким образом, указанные признаки обеспечивают достижение требуемого технического результата, что позволяет их включить в формулу изобретения в качестве отличительных.
Проведенный заявителем анализ уровня техники показал, что в выявленных источниках патентной и научно-технической информации решения, характеризующиеся признаками, тождественными всем признакам способа, отсутствуют, а заявленное изобретение явным образом из уровня техники не следует. Это дает основания полагать, что изобретение соответствует условиям патентоспособности "новизна" и "изобретательский уровень"
На фиг. 1 показано пространственное положение заправочных устройств и световых лучей. Здесь изображены: 1 шланг, 2 корпус заправочного конуса, 3 набор направляющих спиц, 4 юбка конуса, 5 топливоприемник, 6,8 боковые излучатели света, 7 средний излучатель света, 9,11 боковые световые лучи, 10 средний световой луч,  вектор скорости заправочного конуса,
вектор скорости заправочного конуса,  - вектор скорости топливоприемника.
- вектор скорости топливоприемника.
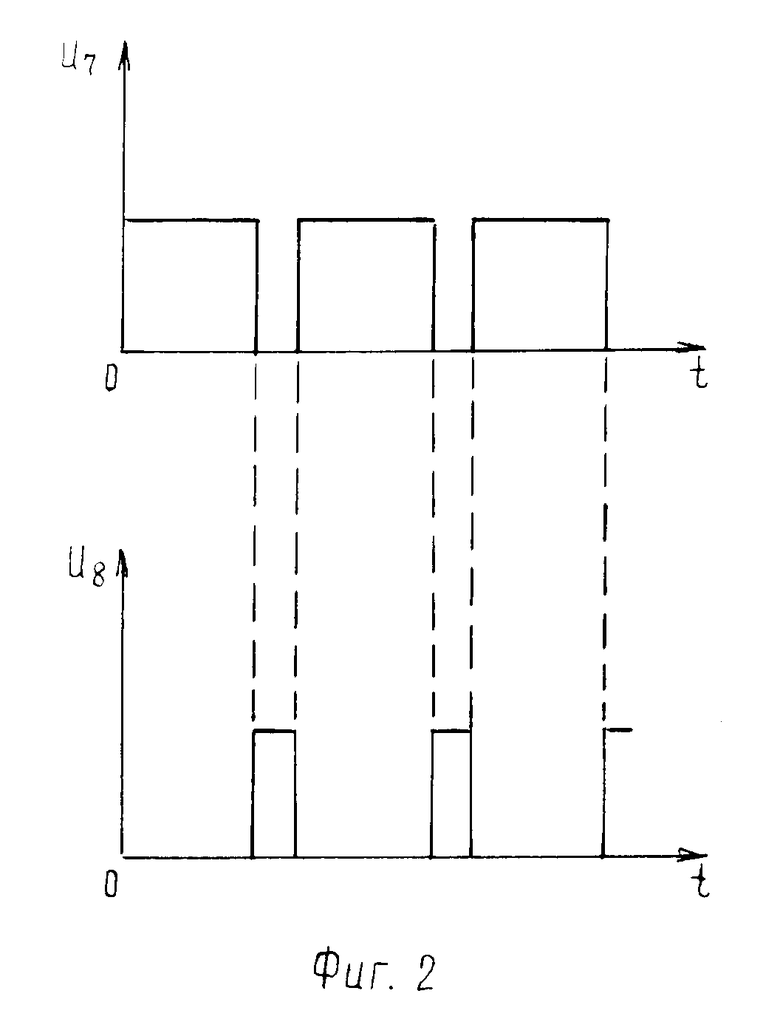
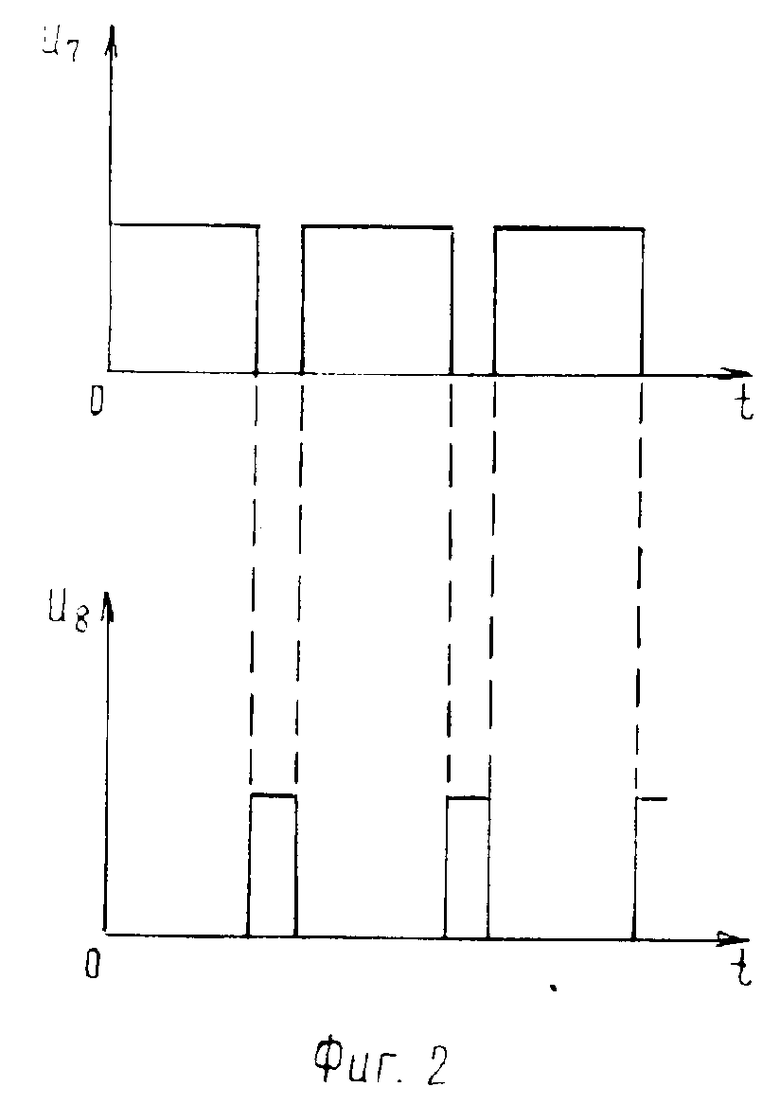
На фиг.2 представлены эпюры модуляции среднего и одного бокового световых лучей.
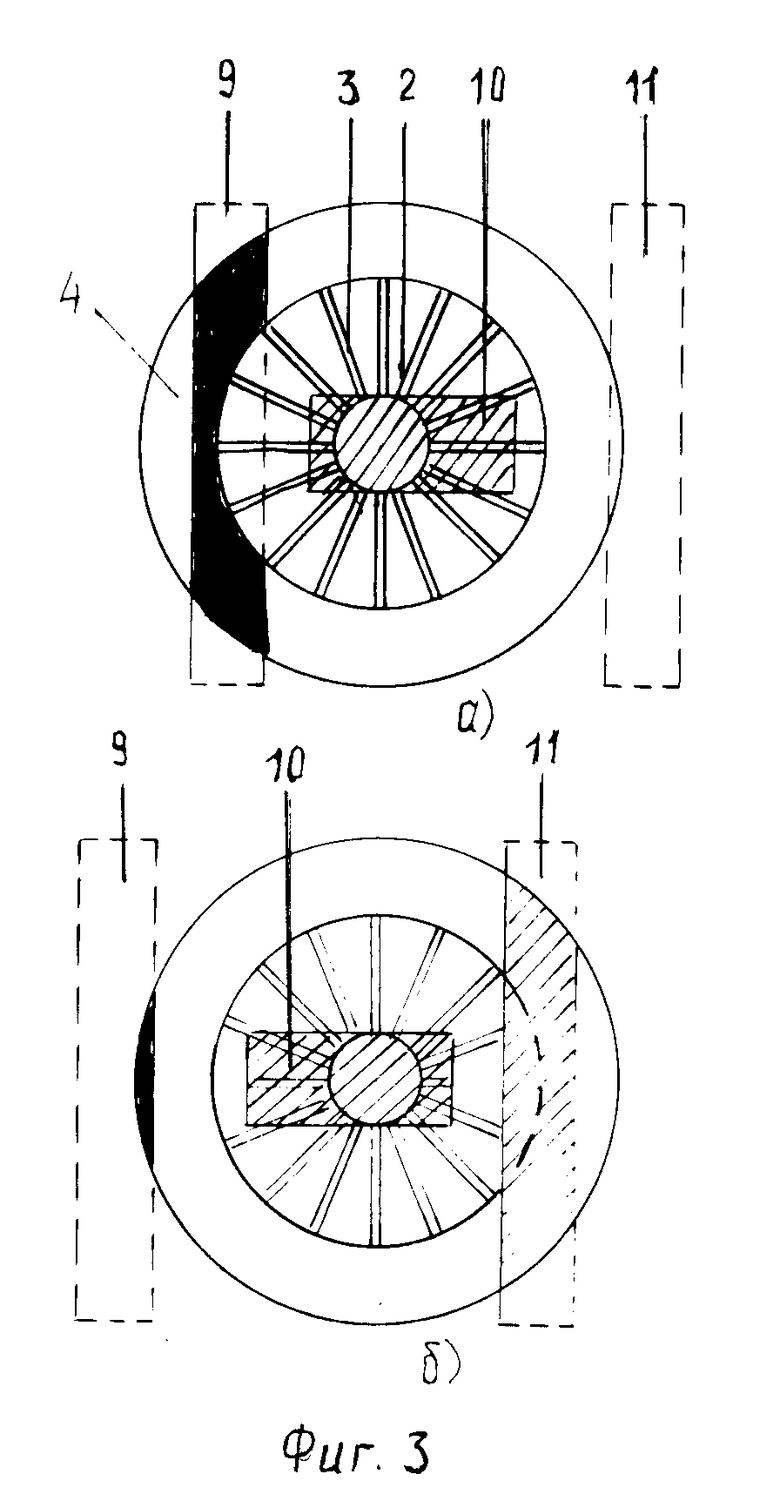
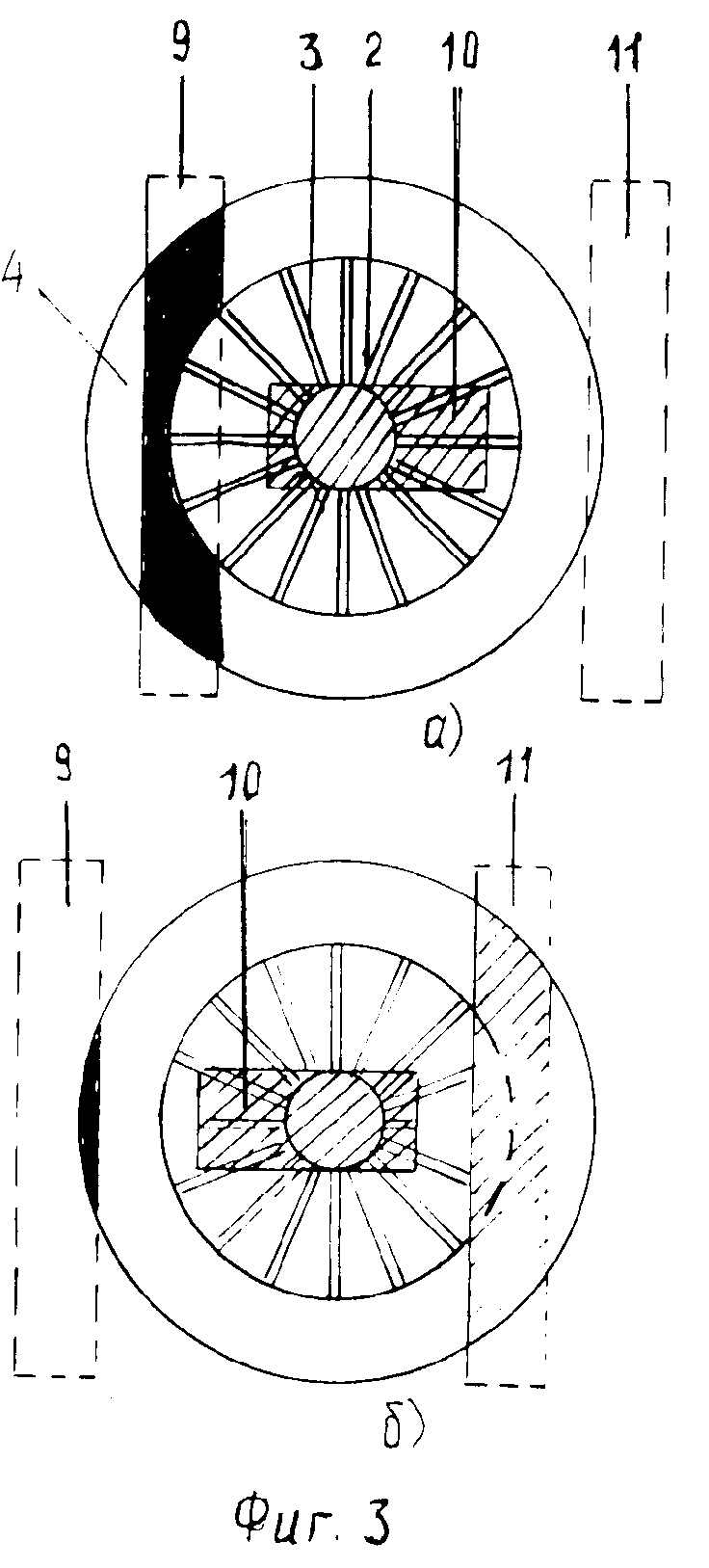
На фиг. 3 изображена конфигурация световых пятен на деталях конуса от световых лучей (сплошная затушевка световое пятно от немодулированного луча, штриховка световое пятно от модулированного луча) при неточном наведении топливоприемника на конус в горизонтальной плоскости: а) уклонение вправо, б) уклонение влево.
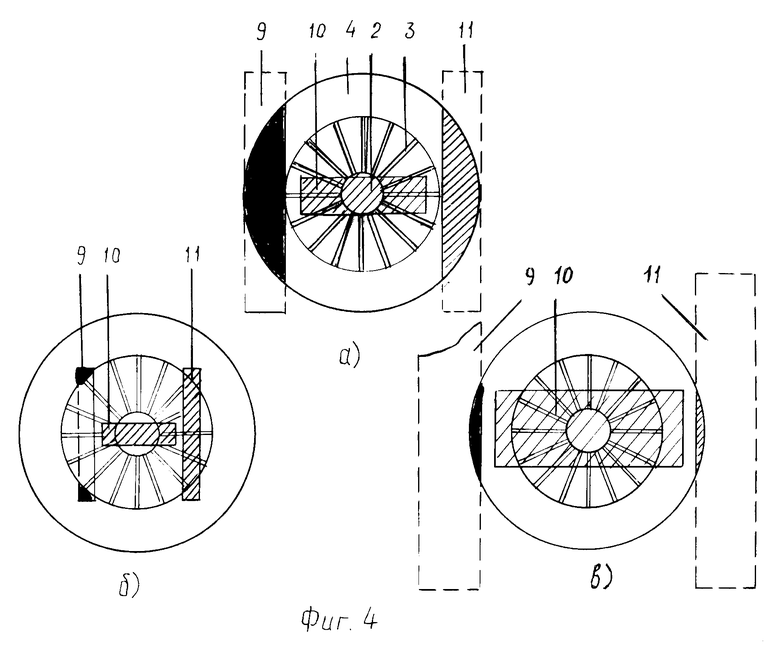
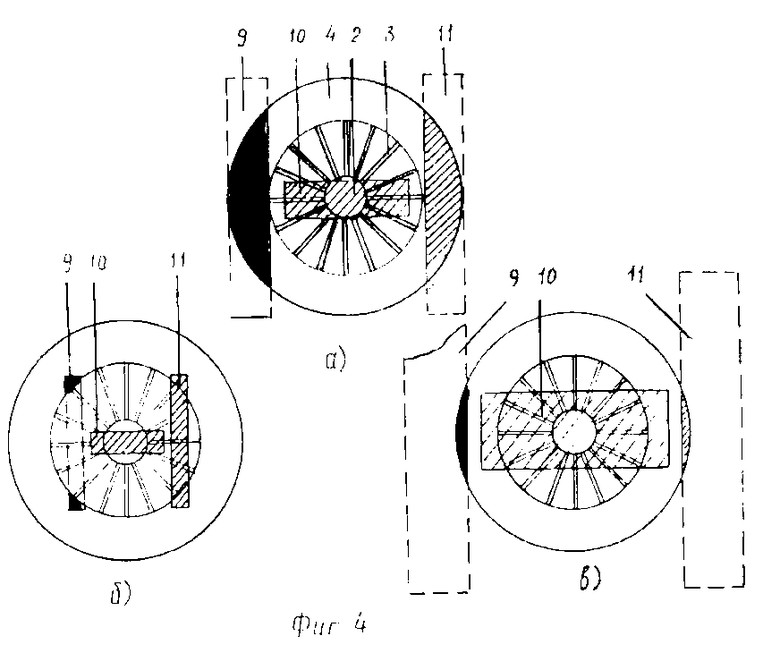
На фиг. 4 изображена конфигурация световых пятен на деталях конуса при точном наведении топливопремника на конус:
а) скорость сближения заправляемого самолета с конусом соответствует требуемой (световые пятна неподвижны);
б) скорость сближения выше требуемой (световые пятна смещаются внутрь контура конуса);
в) скорость сближения ниже требуемой (световые пятна смещаются за пределы контура конуса).
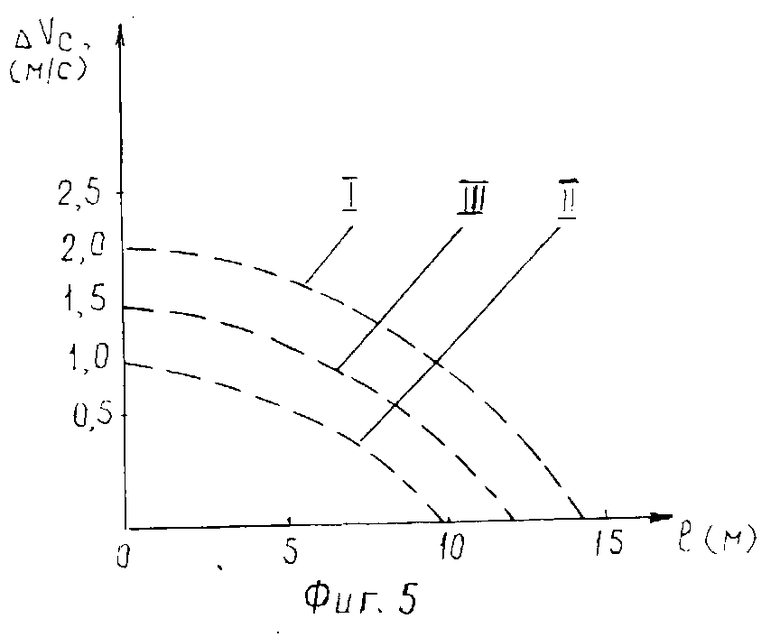
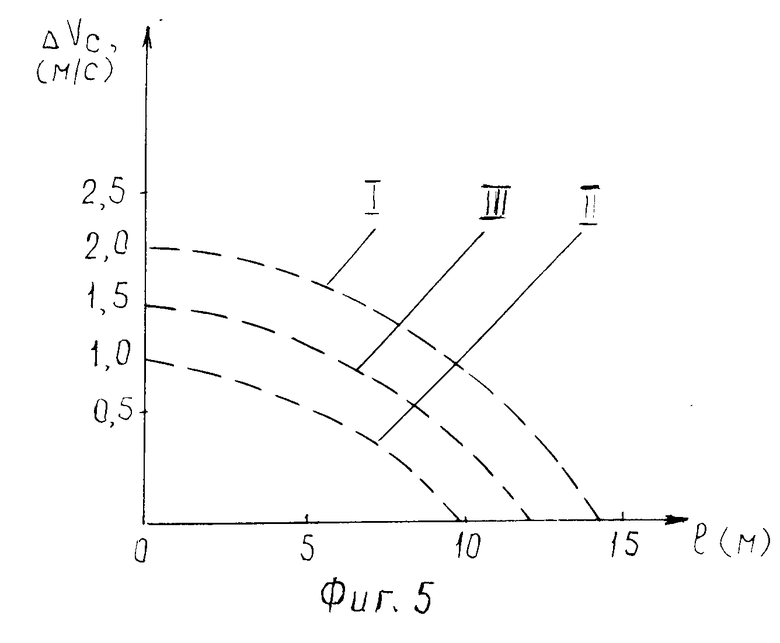
На фиг. 5 показан диапазон изменения относительной скорости (Vc) сближения заправляемого самолета и конуса (самолета-заправщика) в зависимости от расстояния (1) до конуса:
I верхняя граница диапазона изменения относительной скорости сближения заправляемого самолета с конусом,
II нижняя граница,
III оптимальная относительная скорость сближения.
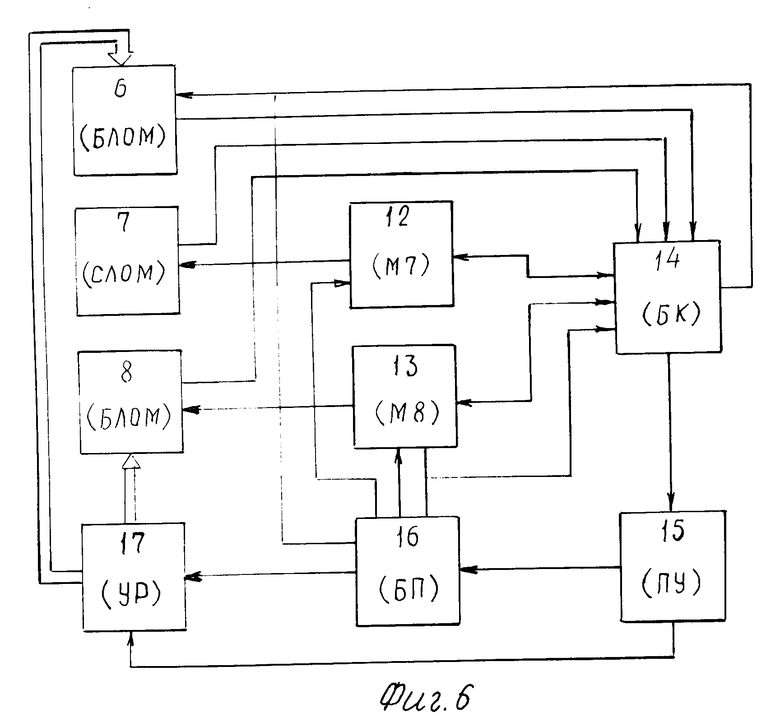
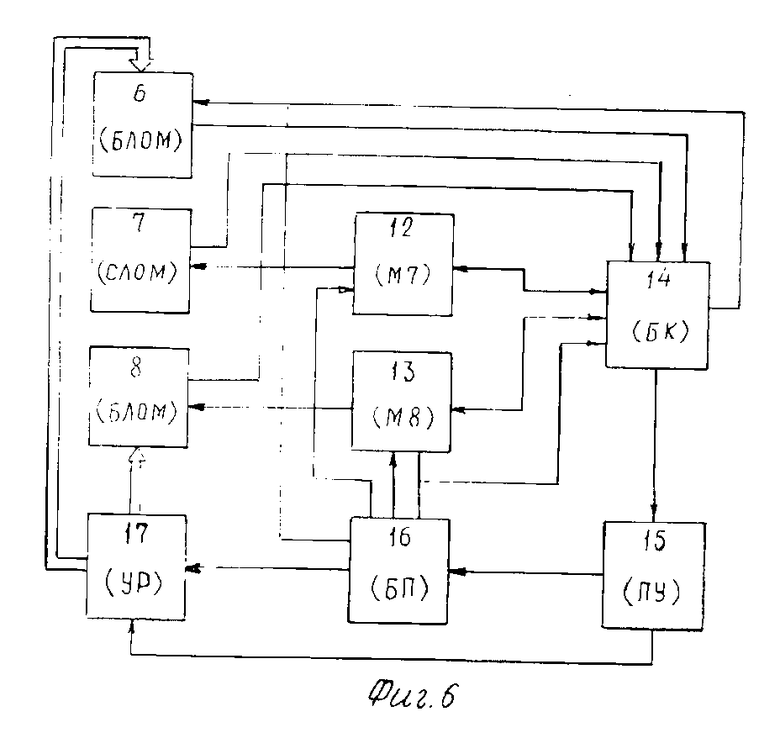
На фиг.6 представлен предпочтительный вариант структурной схемы устройства для осуществления способа, на которой изображены: 6,8 боковые излучатели света боковые лазерные оптические модули (БЛОМ), 7 средний излучатель света средний лазерный оптический модуль (СЛОМ), 12 модулятор яркости среднего лазерного луча (М7), 14 блок контроля (БК), 15 пульт управления (ПУ), 16 блок питания (БП), 17 устройство программного разведения (БЛОМ), 13 модулятор яркости бокового лазерного луча (М8).
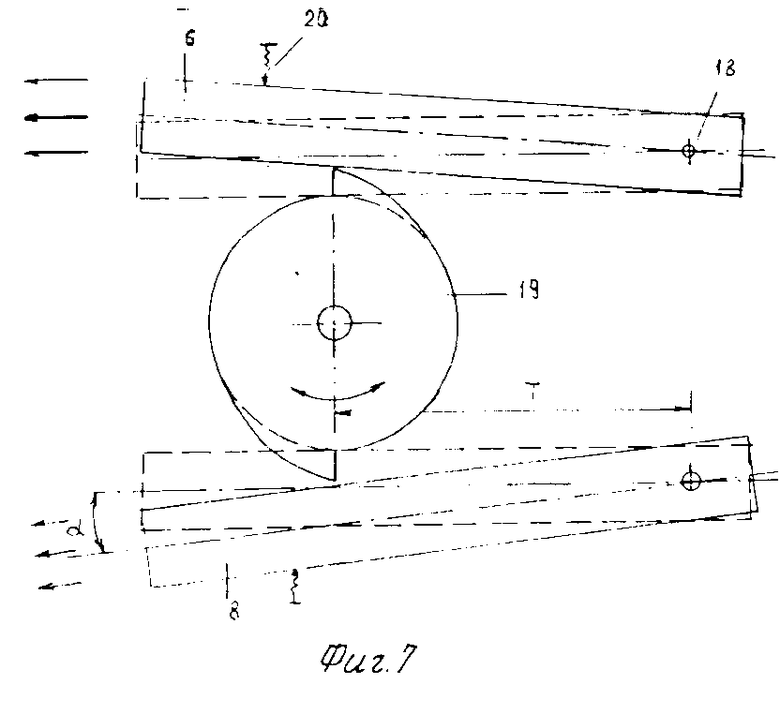
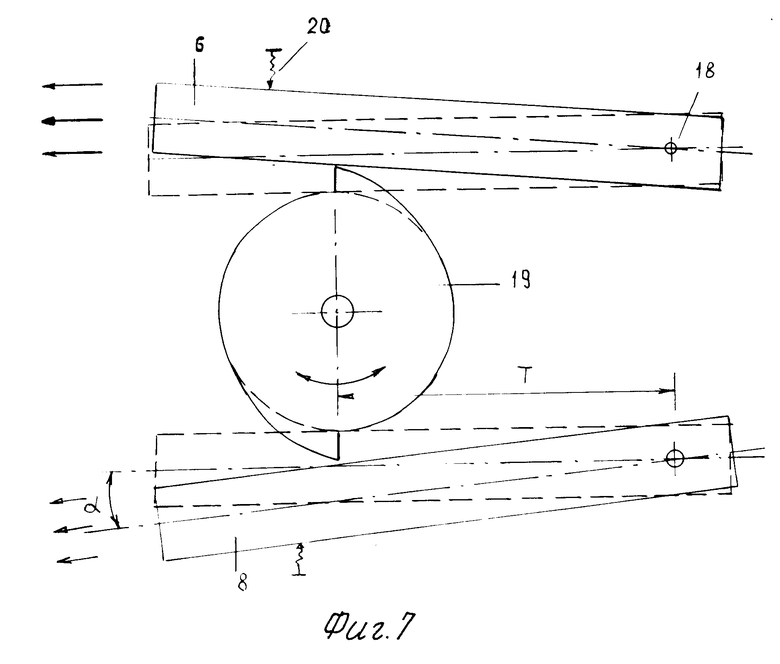
На фиг.7 показан принцип программного разведения боковых лазерных оптических модулей. Здесь изображены: 6, 8 БЛОМ (пунктирными линиями показано исходное положение), 18 ось вращения БЛОМ, 19 профильный кулачок (К), 20 пружинный механизм, α угол поворота БЛОМ, Т расстояние от оси вращения БЛОМ до точки контакта его корпуса с профильным выступом кулачка.
Согласно изобретению способ управления пространственным положением и скоростью самолета при дозаправке топливом в полете заключается в следующем.
Предварительно, перед полетом на заправляемом самолете юстируют источник света. В качестве источника света используют три лазерных оптических модуля, каждый из которых излучает свет в красном спектральном диапазоне в виде прямоугольного луча, который в нормальном (поперечном) сечении имеет форму вытянутого прямоугольника. Красный цвет лучей выбран как наиболее заметный глазом. Диаграмму излучения источника света формируют в виде двух, параллельных друг другу, боковых и среднего, перпендикулярного им в центральной зоне, лучей. При попадании лучей на предмет световые пятна от них образуют на его поверхности фигуру вида "I" или "I I". Более предпочтителен вид "I I", т.к. человеческий глаз более чувствителен к горизонтальным перемещениям световых пятен.
Юстировку источника света осуществляют следующим образом. Вначале путем индивидуальной юстировки лазерных оптических модулей формируют требуемую диаграмму излучения (световое пятно вида "I I"). Затем с помощью юстировки монтажной плиты, на которой закреплены лазерные оптические модули, добиваются правильного пространственного положения диаграммы излучения относительно оси самолета. При этом компенсируют угол атаки самолета и несоосность топливоприемника (штанги с наконечником) относительно строительной оси самолета. В результате лазерные лучи ориентируются практически горизонтально, а в вертикальной плоскости симметрично продольной оси самолета.
Указанная юстировка может быть осуществлена один раз при установке оборудования на самолет и в дальнейшем может только проверяться перед полетом.
Подлет к самолету-заправщику для дозаправки топливом в полете осуществляют с нижней полусферы. Поэтому летчик заправляемого самолета наблюдает заправочный конус всегда и независимо от времени суток, т.к. ночью конус либо освещается с самолета-заправщика, либо подсвечивается лампочками, вмонтированными внутри конуса. При дозаправке днем полет в строю (заправщик-заправляемый самолет) следует осуществлять так, чтобы солнечные лучи не освещали поверхность юбки и внутреннюю часть конуса. Для лучшего восприятия глазом световых пятен от лазерных лучей конуса покрывают белой матовой краской, либо юбку конуса обтягивают белой неблестящей тканью.
На дистанции 15-10 м до конуса уравнивают скорость заправляемого самолета со скоростью самолета-заправщика и осуществляют балансировку заправляемого самолета по всем каналам триммированием. Включают источник света и, управляя заправляемым самолетом в горизонтальной и вертикальной плоскостях, накладывают (совмещают) лазерные лучи на контур (фиг.1) так, что световое пятно 10 от среднего луча 7 помещается в центральной части конуса, а световые пятна 9, 11 от боковых лучей 6, 8, соответственно, на поверхности юбки конуса (фиг.4) в диаметрально противоположных точках.
Для уверенного обнаружения и восприятия глазом световых пятен на деталях конуса яркость излучения среднего лазерного оптического модуля 7 и, соответственно, светового пятна 10, и одного из боковых лазерных оптических модулей, например 8, и, соответственно, светового пятна 11 модулируют в противофазе прямоугольными импульсами (фиг.2) и частотой 3-5 Гц. Более высокая частота "мигания" световых пятен вызывает раздражение глаз. А более длинный период "мигания" (при меньшей частоте) вследствие быстротечности процесса становится соизмерим периодом сближения заправляемого самолета с конусом, что может привести к значительным ошибкам.
Длительность импульсов модуляции (фиг.2) выбрана различной для лучшего различения среднего 10 и бокового 11 световых пятен (фиг.3). При этом длительность свечения среднего пятна 10 больше, т.к. средний лазерный луч падает на относительно мелкие детали заправочного конуса: корпус 2 и направляющие спицы 3 (фиг.1, 3).
При правильном совмещении лазерных лучей с контуром конуса и, следовательно, точном наведении топливоприемника на конус (совмещении их осей) конфигурация световых пятен симметрична относительно центра конуса. При ошибке наведения в вертикальной плоскости вся картинка сдвигается относительно центра конуса вверх или вниз. Если имеет место ошибка наведения в горизонтальной плоскости, то при отклонении оси топливоприемника вправо от центра конуса (фиг. 3а) на юбке 4 конуса будет наблюдаться немигающее пятно 9 от бокового лазерного луча, а мигающее среднее пятно 11 будет смещено вправо, при этом модулированный лазерный луч 8 попадает на незначительную часть юбки или не попадает на нее. При отклонении оси теплоприемника влево от центра конуса (фиг.3б) на юбке конуса будет наблюдаться мигающее боковое пятно 11, а мигающее среднее 10 и немигающее боковое 9 пятна будут смещены влево.
Таким образом, характер свечения пятен и их положение на деталях конуса дают вполне определенную информацию о направлении оси топливоприемника относительно оси заправочного конуса.
За период времени, когда расстояние между самолетом-заправщиком и заправляемым самолетом не меняется (т.к. они летят с одинаковой скоростью) летчик последнего, наблюдая конфигурацию световых пятен на конусе и манипулируя органами управления пространственным положением самолета в горизонтальной и вертикальной плоскостях, точно наводит топливоприемник на конус.
После этого, увеличивая тягу двигателя (двигателей), осуществляют сближение заправляемого самолета с конусом и стыковку с ним топливоприемника. При этом скоростью заправляемого самолета управляют следующим образом.
С уменьшением расстояния до конуса, его угловые размеры увеличиваются со скоростью, пропорциональной скорости сближения. Для удержания световых пятен от боковых лазерных лучей на юбке конуса их разводят от исходного положения со скоростью, также пропорциональной скорости сближения. При этом конфигурация световых пятен на конусе не меняется (пятна неподвижны, фиг.4а). Если по каким-либо причинам скорость заправляемого самолета увеличивается или уменьшается, то световые пятна на конусе смещаются во внутрь контура конуса (фиг.4б) или за его пределы (фиг.4в).
Таким образом формируется визуальная информация о скоростных параметрах сближения заправляемого самолета с конусом.
В заявленном изобретении используют программное разведение боковых лазерных лучей, скорость которого пропорциональна требуемой (заданной) скорости сближения для данного типа заправляемого самолета.
Программное разведение боковых лазерных лучей осуществляют по закону:
dα/dt = f(dl/dt), (1)
где α= arctg Rk/l угол отклонения лазерных боковых лучей от исходного (параллельного друг другу) положения,
Rk радиус фронтальной проекции конуса,
l расстояние между заправляемым самолетов (топливоприемником) и конусом.
Наблюдая расположение световых пятен на конусе, летчик, манипулируя ручкой управления двигателем (двигателями), управляет скоростью самолета (уменьшая ее, или увеличивая) так, чтобы эти пятна все время оставались неподвижными и занимали исходное положение (фиг.4а). Так, если летчик видит, что боковые лучи "уходят" вглубь конуса (фиг.4б), то это значит, что скорость сближения выше требуемой и ее следует уменьшить. Если боковые лучи "уходят" за пределы контура конуса (фиг.4в), то это значит, что скорость сближения ниже требуемой и ее следует увеличить. При этом скорость сближения заправляемого самолета с конусом не выходит за пределы диапазона допустимых величин ее изменения.
Как ранее упоминалось, на дистанции контактирования необходимо выдерживать скорость сближения заправляемого самолета с конусом с превышением на 1-2 м/с относительно скорости конуса. На фиг.5 показан диапазон допустимых значений изменения скорости заправляемого самолета Vc при сближении с конусом. В момент стыковки топливоприемника с конусом (l=0) скорость заправляемого самолета не должна быть выше на величину Dvc= 2,0 м/с (кривая I) и ниже на величину Δvc= 1,0 м/с (кривая II) скорости конуса (самолета-заправщика). При точном совмещении и удерживании световых пятен в пределах контура конуса в процессе контактирования (фиг.4а) изменение скорости сближения Δvc близко к оптимальному (кривая III). Эти данные получены как аналитически, так и путем математической модуляции процесса контактирования, подтверждены наземными испытаниями.
В программе разведения боковых световых лучей предусмотрено определенное (заданное) количество шагов исполнительного механизма устройства разведения на весь этап сближения заправляемого самолета с конусом. Поэтому, если по какой-либо причине (например, ошибки пилотирования) в процессе сближения световые пятна сместятся в горизонтальной или вертикальной плоскостях на значительную величину от исходного положения (что может привести к промаху топливоприемника), то сближение прекращают (скорость заправляемого самолета уравнивают со скоростью самолета-заправщика), выключают устройство разведения световых лучей, вновь точно совмещают световые пятна с контуром конуса (фиг.4а), включают устройство разведения боковых лучей и осуществляют сближение с конусом с новых начальных условий (нового расстояния) до контакта топливоприемника с ним.
Описанный способ может быть осуществлен с помощью устройства, содержащего установленные на заправляемом самолете источник света и блок управления им.
Источник света выполнен в виде трех идентичных лазерных оптических модулей: двух боковых (БЛОМ) 6 и 8 и среднего (СЛОМ)7 (фиг.1). Лазерный оптический модуль содержит цилиндрический корпус, в котором соосно установлены лазер, фокусирующая оптическая система (объектив) и непрозрачная маски с отверстием в виде вытянутого прямоугольника. В качестве лазера может быть использован малогабаритный полупроводниковый лазер, например, типа SPL-3030 с встроенным фотодиодом (ФД), который служит для контроля мощности излучения лазера. СЛОМ 7 крепится неподвижно, а БЛОМ 6 и БЛОМ 8 с возможностью углового относительного исходного (параллельного друг другу и СЛОМ 7) положения, для чего они снабжены осями вращения 18 (фиг.7).
Блок управления источником света (фиг. 6) содержит модулятор яркости среднего лазерного луча (М7) 12, модулятор яркости бокового лазерного луча (М8) 13, блок контроля (БК) 14, пульт управления (ПУ) 15, блок питания (БП) 16, устройство программного разведения лучей (УР) 17.
При этом выходы модуляторов М7 12 и М8 13 подключены соответственно к входу БЛОМ 8, выходы ФД БЛОМ 6, СЛОМ 7 и БЛОМ 8 подключены к первому и третьему входам БК 14, четвертый и пятый входы которого соединены соответственно с М7 12 и М8 13, а шестой вход с БП 16, выходы которого также подключены к М7 12 и М8 13. БК 14 последовательно соединен с ПУ 15, БП 16 и УР 17. Кроме того, второй выход ПУ 15 соединен со вторым входом УР 17, исполнительный орган которого (профильный кулачок 19) кинематически связан с корпусами БЛОМ 6 и БЛОМ 8 (фиг.7).
Описанное устройство выполнено с использованием типовых элементов, в том числе цифровой техники, по правилам инженерного проектирования. Оно работает следующим образом.
При включенном БП 16 по сигналу с ПУ 15 на лазеры лазерных оптических модулей подается ток накачки и они начинают излучать свет в красном диапазоне спектра (длина волны λ=0,64 мкм, мощность излучения P=30 мвт). Луч полупроводникового лазера в поперечном сечении имеет форму вытянутого эллипса. Объектив фокусирует лазерный луч, а пройдя через маску, он приобретает в поперечном сечении форму, близкую к прямоугольной. В исходном положении лазерные оптические модули неподвижны, их продольные оси параллельны. При этом боковые лазерные лучи параллельны друг другу, а между ними перпендикулярно им в центральной зоне расположен средний лазерный луч. При попадании на заправочный конус они образуют на его деталях световые пятна, конфигурация которых показана на фиг.4а. Световые пятна от боковых лазерных лучей 9, 11 располагаются на юбке заправочного конуса в диаметрально противоположных точках ее поверхности, а световое пятно от среднего лазерного луча 10 в центральной части заправочного конуса.
Ток накачки на лазер БЛОМ 6 подается из БК 14 непрерывно, а на лазеры СЛОМ 7 и БЛОМ 8 в импульсном режиме и в противофазе с частотой 3-5 Гц через модуляторы М7 12 и М8 13 соответственно (фиг.6). Таким образом, световое пятно на юбке заправочного конуса от бокового лазерного луча 9 (БЛОМ 6) светится постоянно (фиг.4а), а световые пятна от среднего 10 СЛОМ 7) и бокового 11 (БЛОМ 8) лазерных лучей светятся попеременно, причем длительность свечения среднего светового пятна 10 больше, чем длительность свечения бокового светового пятна 11.
Работа модуляторов М7 12 и М8 13 синхронизируется блоком контроля (БК) 14. В этом блоке также анализируются режимы работы элементов всего устройства и в случае несоответствия заданным параметрам формируются соответствующие сигналы, которые отображаются на пульте управления (ПУ) 15.
Пульт управления размещается в кабине летчика и позволяет ему включать устройство, управлять всеми блоками устройства, оценивать их работоспособность. На пульте индицируются рабочее и аварийное состояние БП, лазеров, положение БЛОМов, имеется ручка управление положением БЛОМов.
При достижении заправляемым самолетом дистанции контактирования (15-10 м до заправочного конуса) и точном совмещении световых пятен с контуром конуса летчик на ПУ 15 включает режим разведения боковых лазерных лучей. При этом включается устройство программного разведения боковых лазерных лучей (УР) 17, выполненное на базе промышленно изготовляемого шагового мотора со схемой управления. Вращение шагового мотора через редуктор передается профильному кулачку 19 (фиг.7), выступы которого, контактируя с корпусами БЛОМ 6 и БЛОМ 8 синхронно отклоняют последние от исходного (параллельного друг другу и СЛОМ 7) положения на одинаковый угол a Для возвращения БЛОМ 6 и БЛОМ 8 в исходное положение служит пружинный механизм 20.
Радиус кривизны профильных выступов кулачка 19 определяется по формуле:
r=T•(Rk/l),
где T расстояние от оси вращения 18 БЛОМ 6 и БЛОМ 8 до точки контакта их корпусов с поверхностью профильных выступов кулачка 19,
Rk радиус фронтальной проекции конуса,
l расстояние между наконечником топливоприемника и конусом.
Из этого соотношения следует, что величина угла a отклонения БЛОМ 6 и БЛОМ 8 от исходного положения обратно пропорциональна расстоянию от заправляемого самолета до конуса. Изменение указанных физических величин во времени (производные dα/dt и dl/dt) являются, соответственно, скоростью разведения боковых лазерных лучей и скоростью сближения заправляемого самолета с конусом, которые связаны пропорциональной зависимостью (формула 1).
Поскольку в формуле (2) величины Rk и l априори известны, то r, а следовательно, скорость разведения боковых лазерных лучей, определяется величиной T. Эту величину подбирают, исходя их динамических характеристик конкретного типа заправляемого самолета.
Следует заметить, что при изготовлении профильного кулачка 19 в соответствии с формулой (2) радиус кривизны профильных выступов при l=0 имеет определенное конечное значение, т.к. устройство программного разведения боковых лазерных лучей (УР) 17 выключатся при достижении топливоприемником расстояния 1,0 0,7 м до конуса, когда промах (непопадание наконечника топливоприемника в горловину конуса) становится невозможным.
При работе УР 17 типовая схема управления шаговым мотором вырабатывает определенную последовательность импульсов напряжения, питающих шаговый мотор. При этом в схеме управления ведется учет этих импульсов. Поэтому всегда известно количество шагов, которые отработал шаговый мотор, вращение которого передается профильному кулачку 19, и отражается на пульте управления (ПУ) 15.
С ПУ 15 можно вручную установить требуемое положение шагового мотора и, следовательно, кулачка 19 в зависимости от дальности до конуса. В этом может возникнуть необходимость в случае приостановки процесса сближения с конусом с целью корректировки пространственного положения заправляемого самолета.
Возвращение БЛОМ 6 и БЛОМ 8 в исходное (параллельное) положение происходит под действием пружинного механизма 20 при установке кулачка 19 в нейтральное исходное положение.
Вышеизложенные сведения подтверждают, что средство, воплощающее заявленное изобретение при его осуществлении, предназначено для использования в промышленности, а именно в авиационной технике, для дозаправки самолетов топливом в полете. Для изобретения в том виде, как оно охарактеризовано в формуле изобретения, подтверждена возможность осуществления с помощью описанных в заявке или известных до даты приоритета средств и методов. При этом средство, воплощающее заявленное изобретение, способно обеспечить достижение указанного в заявке технического результата.
Следовательно, изобретение соответствует условию патентоспособности "промышленная применимость".
Преимущество заявленного способа по сравнению с известными заключается в том, что после отработки на тренажере и 2 3 тренировочных полетов достигается 100-процентная вероятность контактирования заправляемого самолета с заправочным конусом независимо от квалификации летного состава.
Кроме указанного назначения, изобретение может быть использовано в случаях, когда требуется осуществлять контроль определенного расстояния между подвижными объектами. Например, при полете самолетов в строю источник света направляют с одного самолета на фюзеляж другого и по изменению размеров световых пятен судят об изменении расстоянии между самолетами. Аналогичном образом можно контролировать изменение расстояния между речным (морскими) судами при проходе в узких проливах или каналах.
При приземлении самолета, особенно в ночных условиях, источник света направляют ВПП и по изменению расположения световых пятен от лучей лазеров можно судить о пространственном положении самолета относительно плоскости ВПП, а также изменении расстояния до нее.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ВИЗУАЛЬНОГО КОНТРОЛЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ И СКОРОСТИ ЗАПРАВЛЯЕМОГО САМОЛЕТА ПРИ ДОЗАПРАВКЕ ТОПЛИВОМ В ПОЛЕТЕ | 1996 |
|
RU2099253C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗАПРАВКИ САМОЛЕТА ТОПЛИВОМ В ПОЛЕТЕ | 1997 |
|
RU2111154C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ОТРАЖАТЕЛЬНЫХ СВОЙСТВ ОБЪЕКТОВ СЛОЖНОЙ ФОРМЫ В СВЧ ДИАПАЗОНЕ РАДИОВОЛН | 1997 |
|
RU2111506C1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ МАТЕРИАЛОВ | 1996 |
|
RU2109272C1 |
| РАДИОПОГЛОЩАЮЩИЙ МАТЕРИАЛ И СПОСОБ ЕГО ПРИГОТОВЛЕНИЯ | 1996 |
|
RU2107705C1 |
| СПОСОБ СТАБИЛИЗАЦИИ КОНУСА-ДАТЧИКА АГРЕГАТА ЗАПРАВКИ ТОПЛИВОМ В ПОЛЕТЕ | 2012 |
|
RU2523301C2 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В ПРОДОЛЬНОМ КАНАЛЕ ПРИ ДОЗАПРАВКЕ В ВОЗДУХЕ | 2022 |
|
RU2833735C2 |
| СПОСОБ ОБРАБОТКИ ПОСЛЕДОВАТЕЛЬНОСТИ ИЗОБРАЖЕНИЙ ДЛЯ АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ ТАНКЕРА И ОЦЕНИВАНИЯ ЕГО ТРАЕКТОРНЫХ ПАРАМЕТРОВ ПРИ ДОЗАПРАВКЕ В ВОЗДУХЕ НА ФОНЕ ЗВЕЗДНОГО НЕБА | 2016 |
|
RU2624828C1 |
| МНОГОЦЕЛЕВОЙ ВЫСОКОМАНЕВРЕННЫЙ СВЕРХЗВУКОВОЙ САМОЛЕТ, ЕГО АГРЕГАТЫ ПЛАНЕРА, ОБОРУДОВАНИЕ И СИСТЕМЫ | 1996 |
|
RU2207968C2 |
Использование: изобретение позволяет осуществлять стыковку топливоприемника с конусом системы дозаправки самолетов в полете с первого захода и с высокой точностью. Сущность изобретения заключается в том, что с заправляемого самолета в сторону конуса излучают съюстированные с осью топливоприемника три луча света в красном спектральном диапазоне, причем лучи в поперечном сечении имеют форму вытянутого прямоугольника, средний луч ориентируют перпендикулярно двум боковым и располагают в их центральной части. Яркость среднего и одного из боковых лучей модулируют в противофазе прямоугольными импульсами. На дистанции контактирования (15-10 м до конуса) уравнивают скорость заправляемого самолета со скоростью самолета заправщика и, управляя самолетом в вертикальной и горизонтальной плоскостях, совмещают лучи с контурами заправочного конуса. После этого по заданной программе осуществляют синхронное разведение боковых лучей от исходного положения и управляют скоростью заправляемого самолета так, чтобы в процессе сближения с конусом боковые лучи не выходили за пределы ширины его юбки. 2 з.п. ф-лы, 7 ил.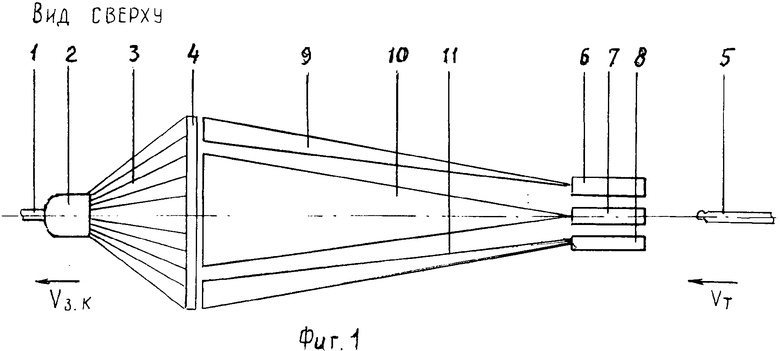
α = arctg (Rк/L),
где Rк радиус фронтальной проекции конуса;
L расстояние между заправляемым самолетом (топливоприемником) и конусом.
| Патент США N 5326052, кл | |||
| Нефтяной конвертер | 1922 |
|
SU64A1 |
