Изобретение относится к области авиационной техники, а именно к системам автоматизированного управления самолетом при дозаправке в воздухе.
Дозаправка самолета в воздухе включает в себя следующие этапы («Алгоритм автоматического управления летательным аппаратом при дозаправке топливом в воздухе», Оболенский Ю.Г., Похваленский В.Л., Чеглаков Д.И., Электронный журнал «Труды МАИ, выпуск 65, рис. 5):
1) выравнивание по высоте заправляемого самолета с танкером дозаправки на удалении 20-30 метров;
2) выравнивание самолета по высоте относительно среднего положения конуса дозаправки танкера на удалении 10-12 метров;
3) стыковка штанги дозаправки самолета с конусом дозаправки танкера.
Выполнение всех этапов дозаправки сопровождается значительной психофизической нагрузкой на летчика. Одним из путей ее снижения является полная автоматизация процесса дозаправки (Чеглаков Д.И., «История исследований в области автоматизации процесса дозаправки топливом в воздухе летательных аппаратов», альманах Новый Университет (технические науки), №4 г. Йошкар-Ола, 2011 г., стр. 34-47; «Алгоритм дозаправки неманевренного самолета в воздухе в автоматическом режиме», Поединок В.М., ученые записки ЦАГИ. - 2004. Т. XXXVI, №1-2; «Алгоритм автоматического управления летательным аппаратом при дозаправке топливом в воздухе», Оболенский Ю.Г., Похваленский В.Л., Чеглаков Д.И., Электронный журнал «Труды МАИ», выпуск 65). Другим направлением снижения психофизической нагрузки на летчика при дозаправке в режиме ручного управления, по-прежнему востребованном в летной практике, является совершенствование штатных систем дистанционного управления (СДУ) с целью упрощения пилотирования самолетом. Так, в патенте на изобретение Летно-исследовательского института им. М.М. Громова №2055784 «Система автоматизированного управления для заправки самолета в воздухе», предлагается усовершенствованная СДУ, позволяющая осуществлять плоское перемещение центра масс самолета в вертикальной и боковой плоскостях без углового вращения по тангажу, крену и рысканию. Ее недостатками являются:
- необходимость использования второго органа управления самолетом (флаперона);
- сложность точной развязки взаимодействия путевого и кренового каналов управления самолетом в различных полетных конфигурациях и запасах топлива и в условиях приближенного знания о соответствии фактических и расчетных аэродинамических характеристик;
- отсутствие порядка взаимодействия предложенной СДУ со штатной СДУ, имеющейся на самолете;
- использование датчика угла атаки, сигналы с которого содержат значительные по уровню помехи при попадании самолета в спутную струю от танкера дозаправки;
- применение статических законов управления, отличающихся ограниченной точностью отработки заданной перегрузки; зависимостью балансировочного положение ручки управления самолетом (РУС) от режима полета (по высоте и скорости), от выработки топлива, от конфигурации объекта, что требует от летчика периодического триммирования усилий на РУС; зависимостью градиентов расхода РУС на создание нормальной перегрузки относительно балансировочного положения от режима полета; отсутствием гарантированного достижения требуемых максимальных (минимальных) значений нормальной перегрузки (угла тангажа) при крайних положениях РУС, позволяющих экстренно уйти от танкера дозаправки в опасной ситуации.
Задачей настоящего изобретения является:
- повышение точности отработки заданной перегрузки на всех этапах выполнения режима дозаправки (за счет использования астатического закона управления перегрузкой);
- повышение точности позиционирования (стыковки) заправочной штанги самолета с конусом танкера-заправщика;
- исключение зависимости балансировочного положения РУС от режима полета (по высоте и скорости), от выработки топлива, от конфигурации объекта и освобождение летчика, за счет этого, от необходимости периодического триммирования усилий на РУС;
- обеспечение независимости (стабильности) градиентов расхода РУС на создание нормальной перегрузки относительно балансировочного положения от режима полета;
- гарантированное достижение требуемых максимальных (минимальных) значений нормальной перегрузки (угла тангажа) при крайних положениях РУС, позволяющих экстренно уйти от танкера дозаправки в опасных ситуациях;
- снижение психофизической нагрузки на летчика при выполнении режима дозаправки в воздухе.
Техническим результатом, достигаемым в заявляемой системе автоматизированного управления самолетом в продольном канале при дозаправке в воздухе, является повышается точность и безопасность выполнения дозаправки в воздухе.
Технический результат достигается тем, что заявляемая к патентованию система автоматизированного управления самолетом в продольном канале при дозаправке в воздухе содержит вычислитель сигнала статической системы дистанционного управления, рулевой привод стабилизатора (руля высоты), вход которого подключен к выходу вычислителя сигнала статической СДУ, стабилизатор, соединенный с рулевым приводом, датчик положения ручки управления по тангажу, датчик угловой скорости тангажа, датчик угла атаки, датчик нормальной перегрузки, датчик угла тангажа, датчик угла крена, блок формирования сигналов переключения по командам от летчика, первый и второй блоки коммутации сигналов, вычислитель сигнала контура отработки нормальной перегрузки, на входы которого поступают сигналы с выходов второго блока коммутации сигналов, датчика угловой скорости тангажа и датчика нормальной перегрузки, вычислитель сигнала заданной перегрузки при сближении самолета с танкером, на входы которого поступают сигналы с датчика положения ручки управления по тангажу и блока формирования сигналов переключения «Дз» и «Поз», вычислитель сигнала заданной перегрузки при позиционном управлении, на входы которого поступают сигналы с выходов датчика положения ручки управления по тангажу, датчика угла атаки, датчика угла тангажа, датчика угла крена и блока формирования сигналов переключения, при этом на входы вычислителя статической СДУ поступают сигналы с выходов первого блока коммутации сигналов, датчика угловой скорости тангажа, датчика угла атаки и датчика нормальной перегрузки, выход датчика положения ручки управления по тангажу соединен с первым входом первого блока коммутации сигналов, сигнал с выхода вычислителя сигнала контура отработки нормальной перегрузки поступает на второй вход первого блока коммутации сигналов, а на управляющий вход первого блока коммутации сигналов поступает сигнал «Дз» с выхода блока формирования сигналов переключения, выход вычислителя сигнала заданной перегрузки при сближении самолета с танкером соединен с первым входом второго блока коммутации сигналов, выход вычислителя сигнала заданной перегрузки при позиционном управлении соединен со вторым входом второго блока коммутации сигналов, а на управляющий вход второго блока коммутации сигналов поступает сигнал «Поз» с выхода блока формирования сигналов переключения.
Вычислитель сигнала контура отработки нормальной перегрузки содержит первый, второй и третий усилители сигналов (передаточные числа), первый, второй, третий и четвертый сумматоры, интегратор, блок ограничения скорости изменения входного сигнала и блок постоянного единичного сигнала, первый инвертирующий и второй входы первого сумматора подключены соответственно к выходам первого блока коммутации сигналов и к выходу второго сумматора, выход первого сумматора соединен с входами первого и второго усилителей сигналов, первый и второй инвертирующий входы второго сумматора соединены соответственно с выходом датчика перегрузки и с выходом блока постоянного единичного сигнала, первый и второй входы третьего сумматора подключены соответственно к выходам интегратора и четвертого сумматора, первый и второй входы четвертого сумматора соединены соответственно с выходами второго и третьего усилителей сигналов, вход третьего усилителя сигналов соединен с выходом датчика угловой скорости тангажа, выход первого усилителя сигналов соединен с входом интегратора, выход третьего сумматора подключен к входу блока ограничения скорости изменения входного сигнала, при этом выход блока ограничения скорости изменения входного сигнала является выходом вычислителя сигнала контура отработки нормальной перегрузки.
Вычислитель сигнала заданной перегрузки при сближении самолета с танкером содержит третий блок коммутации сигналов, на управляющий вход которого подается сигнал «Дз» с выхода блока формирования сигналов переключения, первый и второй нелинейные блоки и первое запоминающее устройство, вход которого подключен к выходу третьего блока коммутации сигналов, а выход соединен с входом первого нелинейного блока, первый и второй входы второго нелинейного блока соединены соответственно с выходами датчика положения ручки управления по тангажу и первого нелинейного блока, нормально замкнутый входной контакт третьего блока коммутации сигналов соединен с выходом датчика положения ручки управления по тангажу, а выход второго нелинейного блока является выходом вычислителя сигнала заданной перегрузки при сближении самолета с танкером.
Вычислитель сигнала заданной перегрузки при позиционном управлении содержит четвертый и пятый блоки коммутации сигналов, на управляющие входы которых подается сигнал «Поз» с выхода блока формирования сигналов переключения, пятый, шестой и седьмой сумматоры, третий, четвертый и пятый нелинейные блоки, вычислитель угла наклона траектории полета самолета, вычислитель корректирующего сигнала перегрузки, первый и второй входы которого соединены соответственно с выходом вычислителя угла наклона траектории полета самолета и с выходом пятого нелинейного блока, второе и третье запоминающие устройства, четвертый усилитель сигнала (передаточное число), вход которого подключен к выходу шестого сумматора, а выход которого соединен с первым входом седьмого сумматора, выход четвертого блока коммутации сигналов через последовательно соединенные второе запоминающее устройство и третий нелинейный блок соединен с первым входом четвертого нелинейного блока, второй вход которого подключен к выходу датчика положения ручки управления по тангажу, входной нормально замкнутый контакт четвертого блока коммутации сигналов соединен с выходом датчика положения ручки управления по тангажу, первый и второй инвертирующий входы шестого сумматора подключены соответственно к выходу четвертого нелинейного блока и к выходу пятого сумматора, первый вход которого и нормально замкнутые входные контакты пятого блока коммутации сигналов соединены с выходом датчика угла тангажа, выход пятого блока коммутации сигналов через третье запоминающее устройство подключен к второму инвертирующему входу пятого сумматора, вход пятого нелинейного блока соединен с выходом датчика угла крена, выход вычислителя корректирующего сигнала перегрузки подключен к второму входу седьмого сумматора, выход которого является выходом вычислителя сигнала заданной перегрузки при позиционном управлении.
Сущность изобретения поясняется следующими графическими изображениями:
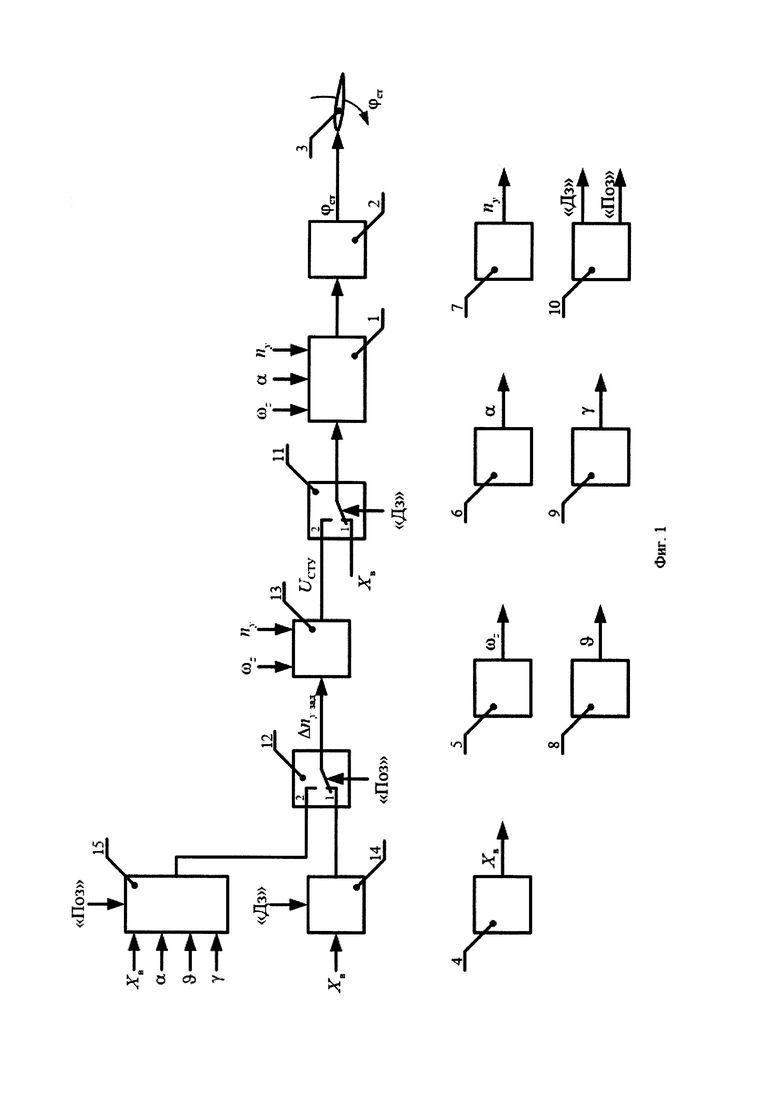
на фиг. 1 изображена структурная схема системы автоматизированного управления самолетом в продольном канале при дозаправке в воздухе;
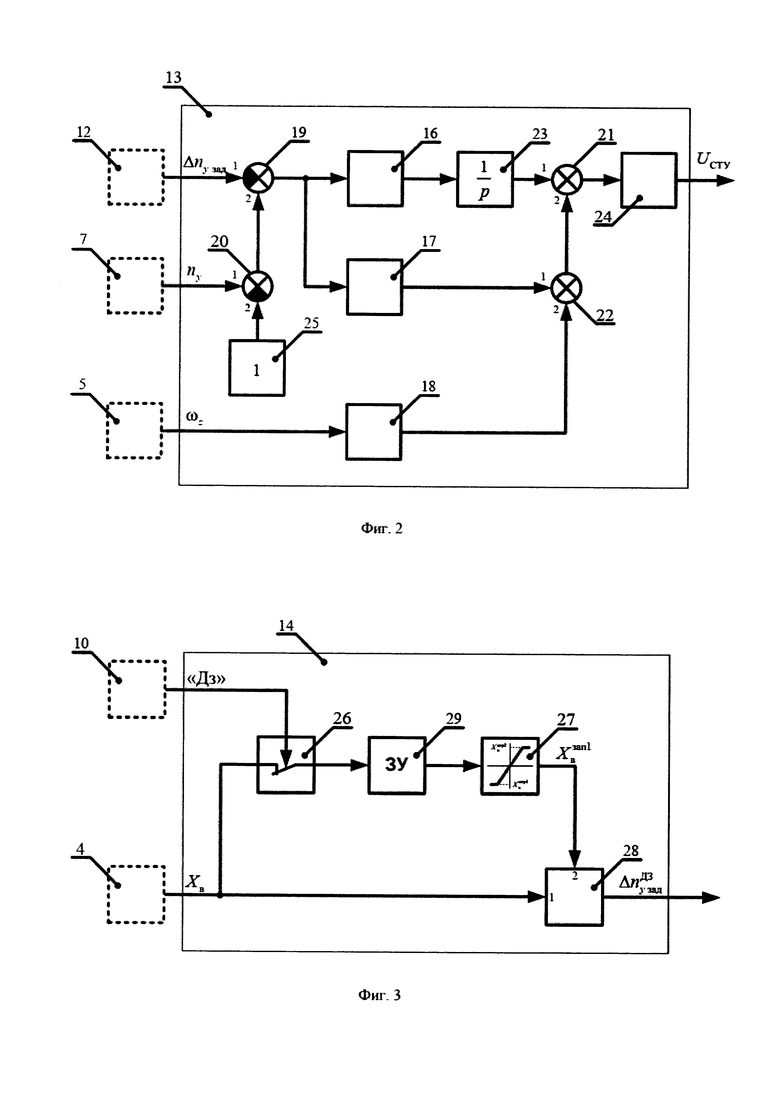
на фиг. 2 представлена структурная схема вычислителя сигнала контура отработки нормальной перегрузки;
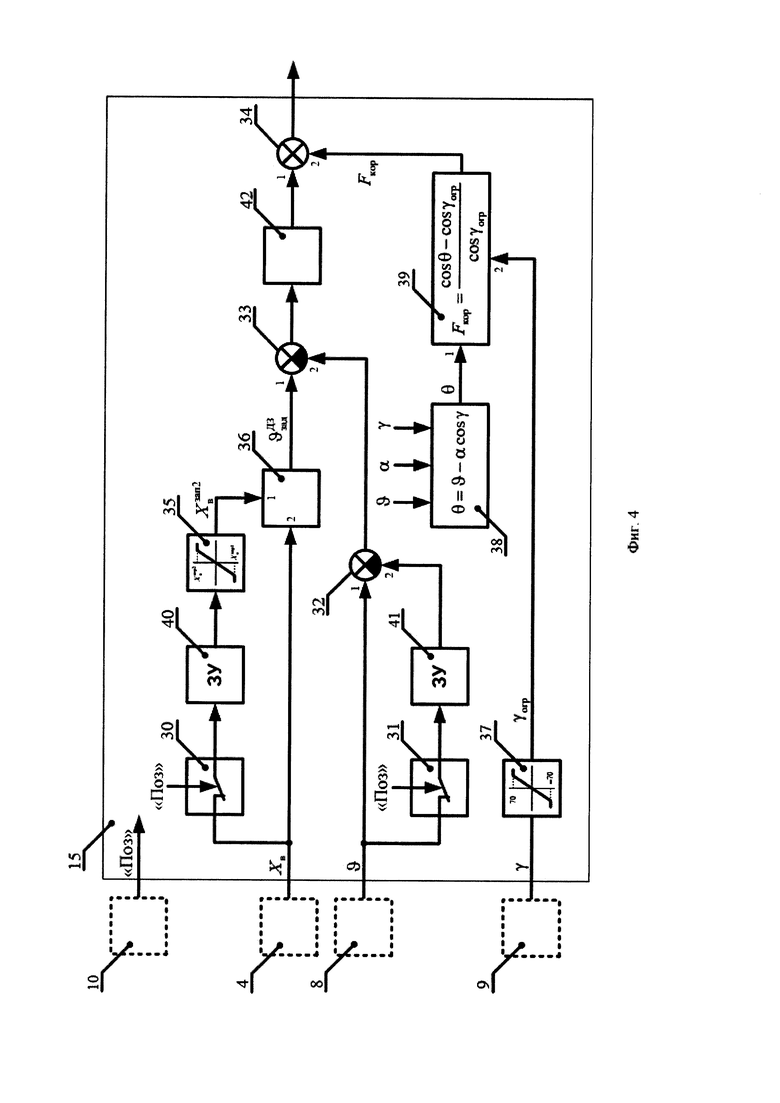
на фиг. 3 приведена структурная схема вычислителя сигнала заданной перегрузки при сближении самолета с танкером;
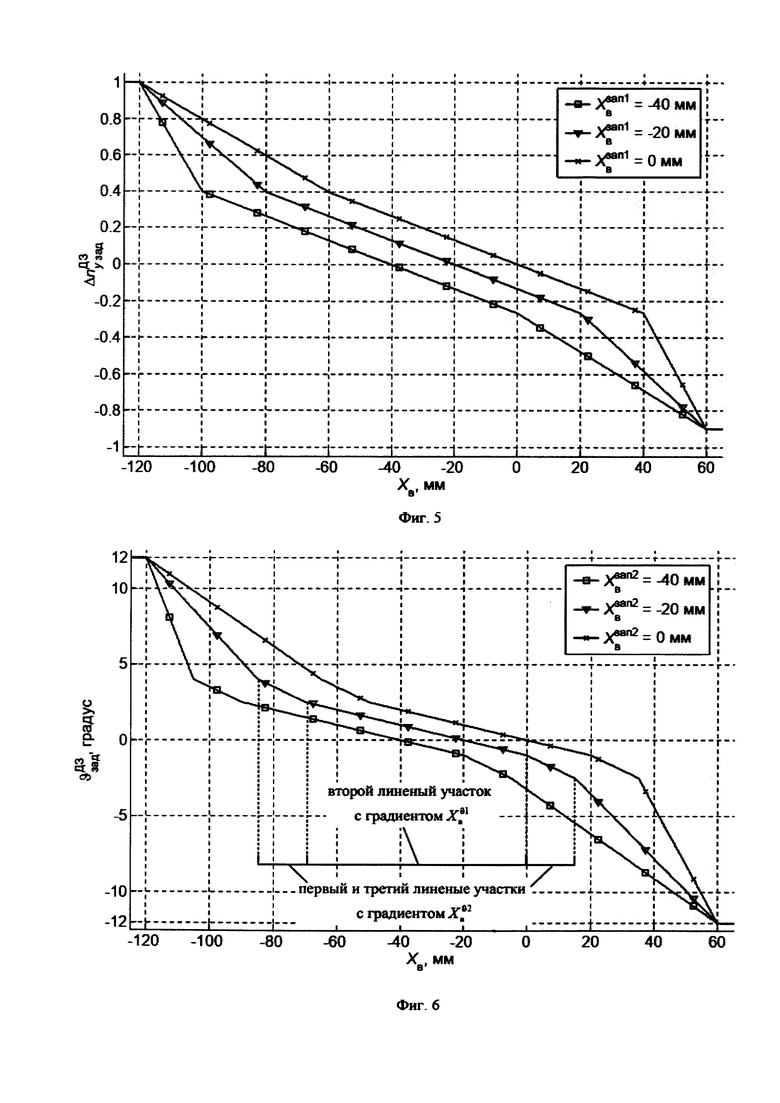
на фиг. 4 изображена структурная схема вычислителя сигнала заданной перегрузки при позиционном управлении (при точном позиционировании штанги с конусом танкера);
на фиг. 5 представлена нелинейная характеристика второго нелинейного блока;
на фиг. 6 представлена нелинейная характеристика четвертого нелинейного блока.
На фигурах 1-6 использованы следующие обозначения:
1 - вычислитель сигнала статической системы дистанционного управления (СДУ);
2 - рулевой привод стабилизатора (руля высоты);
3 - стабилизатор (руль высоты);
4 - датчик положения ручки управления по тангажу;
5 - датчик угловой скорости тангажа;
6 - датчик угла атаки;
7 - датчик нормальной перегрузки;
8 - датчик угла тангажа;
9 - датчик угла крена;
10 - блок формирования сигналов переключения по командам от летчика;
11 - первый блок коммутации сигналов;
12 - второй блок коммутации сигналов;
13 - вычислитель сигнала контура отработки нормальной перегрузки;
14 - вычислитель сигнала заданной перегрузки при сближении самолета с танкером;
15 - вычислитель сигнала заданной перегрузки при позиционном управлении;
16, 17, 18 - первый, второй и третий усилители сигналов;
19, 20, 21, 22 - первый, второй, третий и четвертый сумматоры;
23 - интегратор;
24 - блок ограничения скорости изменения входного сигнала;
25 - блок постоянного единичного сигнала;
26 - третий блок коммутации сигналов;
27, 28 - первый и второй нелинейные блоки;
29 - первое запоминающее устройство;
30, 31 - четвертый и пятый блоки коммутации сигналов;
32, 33, 34 - пятый, шестой и седьмой сумматоры;
35,36,37 - третий, четвертый и пятый нелинейные блоки;
38 - вычислитель угла наклона траектории полета самолета;
39 - вычислитель корректирующего сигнала перегрузки;
40,41 - второе и третье запоминающие устройства;
42 - четвертый усилитель сигнала;
Хв - сигнал с выхода датчика перемещения РУС;
ωz - сигнал с выхода датчика угловой скорости тангажа;
α - сигнал с выхода датчика угла атаки;
nу - сигнал с выхода датчика вертикальной перегрузки;
ϑ - сигнал с выхода датчика угла тангажа;
γ - сигнал с выхода датчика угла крена;
Δnу зад - сигнал заданного значения избыточной вертикальной перегрузки;
UСТУ - сигнал заданного значения отрабатываемой вертикальной перегрузки;
ϕст - сигнал заданного положения стабилизатора (руля высоты);
«Дз» - логический сигнал на включение режима дозаправки;
«Поз» - логический сигнал на включение режима позиционирования (стыковки) штанги самолета с конусом танкера-заправщика;
ЗУ - запоминающее устройство;
 - максимальная ограниченная величина запомненного сигнала РУС;
- максимальная ограниченная величина запомненного сигнала РУС;
 - минимальная ограниченная величина запомненного сигнала РУС;
- минимальная ограниченная величина запомненного сигнала РУС;
 - запомненное значение сигнала РУС в режиме дозаправки;
- запомненное значение сигнала РУС в режиме дозаправки;
 - сигнал избыточной заданной перегрузки на выходе второго нелинейного блока 28;
- сигнал избыточной заданной перегрузки на выходе второго нелинейного блока 28;
 - запомненное значение сигнала РУС в режиме позиционирования;
- запомненное значение сигнала РУС в режиме позиционирования;
 - сигнал заданного угла тангажа на выходе четвертого нелинейного блока 36;
- сигнал заданного угла тангажа на выходе четвертого нелинейного блока 36;
γогр - сигнал угла крена с учетом ограничения;
θ - сигнала вычисленного угла наклона траектория;
Fкор - корректирующий сигнал перегрузки.
 - потребный градиент расхода РУС на создание нормальной перегрузки вблизи запомненного значения;
- потребный градиент расхода РУС на создание нормальной перегрузки вблизи запомненного значения;
Хmin - минимальная величина сигнала отклонения РУС по тангажу;
 - начало линейного участка с заданным градиентом
- начало линейного участка с заданным градиентом  относительно запомненного значения;
относительно запомненного значения;
 - конец линейного участка с заданным градиентом
- конец линейного участка с заданным градиентом  относительно запомненного значения;
относительно запомненного значения;
Хmaх - максимальная величина сигнала отклонения РУС по тангажу;
 - максимальная потребная нормальная перегрузка;
- максимальная потребная нормальная перегрузка;
 - минимальная потребная нормальная перегрузка.
- минимальная потребная нормальная перегрузка.
 - потребный градиент расхода РУС на создание угла тангажа на втором линейном участке (вблизи запомненного значения);
- потребный градиент расхода РУС на создание угла тангажа на втором линейном участке (вблизи запомненного значения);
 - потребный градиент расхода РУС на создание угла тангажа на первом и третьем линейном участке;
- потребный градиент расхода РУС на создание угла тангажа на первом и третьем линейном участке;
 - начало первого линейного участка относительно запомненного значения;
- начало первого линейного участка относительно запомненного значения;
 - начало второго линейного участка относительно запомненного значения;
- начало второго линейного участка относительно запомненного значения;
 - конец второго линейного участка относительно запомненного значения;
- конец второго линейного участка относительно запомненного значения;
 - конец третьего линейного участка относительно запомненного значения;
- конец третьего линейного участка относительно запомненного значения;
ϑmах - максимальный потребный угол тангажа относительно запомненного значения;
ϑmin - минимальный потребный угол тангажа относительно запомненного значения.
Система автоматизированного управления самолетом в продольном канале при дозаправке в воздухе (фиг. 1) содержит вычислитель 1 сигнала статической системы дистанционного управления (СДУ), рулевой привод 2 стабилизатора (руля высоты), вход которого подключен к выходу вычислителя 1 сигнала статической СДУ, стабилизатор 3, соединенный с рулевым приводом 2, датчик 4 положения ручки управления по тангажу, датчик 5 угловой скорости тангажа, датчик 6 угла атаки, датчик 7 нормальной перегрузки, датчик 8 угла тангажа, датчик 9 угла крена, блок 10 формирования сигналов переключения по командам от летчика, первый 11 и второй 12 блоки коммутации сигналов, вычислитель 13 сигнала контура отработки нормальной перегрузки, на входы которого поступают сигналы с выходов второго блока 12 коммутации сигналов, датчика 5 угловой скорости тангажа и датчика 6 нормальной перегрузки, вычислитель 14 сигнала заданной перегрузки при сближении самолета с танкером, на входы которого поступают сигналы с датчика 4 положения ручки управления по тангажу и блока 10 формирования сигналов переключения, вычислитель 15 сигнала заданной перегрузки при позиционном управлении, на входы которого поступают сигналы с выходов датчика 4 положения ручки управления по тангажу, датчика 6 угла атаки, датчика 8 угла тангажа, датчика 9 угла крена и блока 10 формирования сигналов переключения, при этом на входы вычислителя 1 статической СДУ поступают сигналы с выходов первого блока 11 коммутации сигналов, датчика 5 угловой скорости тангажа, датчика 6 угла атаки и датчика 7 нормальной перегрузки, выход датчика 4 положения ручки управления по тангажу соединен с первым входом первого блока 11 коммутации сигналов, сигнал с выхода вычислителя 13 сигнала контура отработки нормальной перегрузки поступает на второй вход первого блока 11 коммутации сигналов, а на управляющий вход первого блока 11 коммутации сигналов поступает сигнал «Дз» с выхода блока 10 формирования сигналов переключения, выход вычислителя 14 сигнала заданной перегрузки при сближении самолета с танкером соединен с первым входом второго блока 12 коммутации сигналов, выход вычислителя 15 сигнала заданной перегрузки при позиционном управлении соединен со вторым входом второго блока 12 коммутации сигналов, а на управляющий вход второго блока 12 коммутации сигналов поступает сигнал «Поз» с выхода блока 10 формирования сигналов переключения.
Вычислитель 13 сигнала контура отработки нормальной перегрузки (фиг. 2) содержит первый 16, второй 17 и третий 18 усилители сигналов (передаточные числа), первый 19, второй 20, третий 21 и четвертый 22 сумматоры, интегратор 23, блок 24 ограничения скорости изменения входного сигнала и блок 25 постоянного единичного сигнала, первый инвертирующий и второй входы первого сумматора 19 подключены соответственно к выходам первого блока 12 коммутации сигналов и к выходу второго сумматора 20, выход первого сумматора 19 соединен с входами первого 16 и второго 17 усилителей сигналов, первый и второй инвертирующий входы второго сумматора 20 соединены соответственно с выходом датчика 7 перегрузки и с выходом блока 25 постоянного единичного сигнала, первый и второй входы третьего сумматора 21 подключены соответственно к выходам интегратора 23 и четвертого сумматора 22, первый и второй входы четвертого сумматора 22 соединены соответственно с выходами второго 17 и третьего 18 усилителей сигналов, вход третьего 18 усилителя сигналов соединен с выходом датчика 5 угловой скорости тангажа, выход первого 16 усилителя сигналов соединен с входом интегратора 23, выход третьего сумматора 21 подключен к входу блока 24 ограничения скорости изменения входного сигнала, при этом выход блока 24 ограничения скорости изменения входного сигнала является выходом вычислителя 13 сигнала контура отработки нормальной перегрузки.
Вычислитель 14 сигнала заданной перегрузки при сближении самолета с танкером (фиг. 3) содержит третий блок 26 коммутации сигналов, на управляющий вход которого подается сигнал «Дз» с выхода блока 10 формирования сигналов переключения, первый 27 и второй 28 нелинейные блоки и первое запоминающее устройство 29, вход которого подключен к выходу третьего блока 26 коммутации сигналов, а выход соединен с входом первого нелинейного блока 27, первый и второй входы второго нелинейного блока 28 соединены соответственно с выходами датчика 4 положения ручки управления по тангажу и первого нелинейного блока 27, нормально замкнутый входной контакт третьего блока 26 коммутации сигналов соединен с выходом датчика 4 положения ручки управления по тангажу, а выход второго нелинейного блока 28 является выходом вычислителя 14 сигнала заданной перегрузки при сближении самолета с танкером.
Вычислитель 15 сигнала заданной перегрузки при позиционном управлении (фиг. 4) содержит четвертый 30 и пятый 31 блоки коммутации сигналов, на управляющие входы которых подается сигнал «Поз» с выхода блока 10 формирования сигналов переключения, пятый 32, шестой 33 и седьмой 34 сумматоры, третий 35, четвертый 36 и пятый 37 нелинейные блоки, вычислитель 38 угла наклона траектории полета самолета, вычислитель 39 корректирующего сигнала перегрузки, первый и второй входы которого соединены соответственно с выходом вычислителя 39 угла наклона траектории полета самолета и с выходом пятого нелинейного блока 37, второе 40 и третье 41 запоминающие устройства, четвертый усилитель 42 сигнала (передаточное число), вход которого подключен к выходу шестого сумматора 33, а выход которого соединен с первым входом седьмого сумматора 34, выход четвертого блока 30 коммутации сигналов через последовательно соединенные второе запоминающее устройство 40 и третий нелинейный блок 35 соединен с первым входом четвертого нелинейного блока 36, второй вход которого подключен к выходу датчика 4 положения ручки управления по тангажу, входной нормально замкнутый контакт четвертого блока 30 коммутации сигналов соединен с выходом датчика 4 положения ручки управления по тангажу, первый и второй инвертирующий входы шестого сумматора 33 подключены соответственно к выходу четвертого нелинейного блока 36 и к выходу пятого сумматора 32, первый вход которого и нормально замкнутые входные контакты пятого блока 31 коммутации сигналов соединены с выходом датчика 8 угла тангажа, выход пятого блока 31 коммутации сигналов через третье запоминающее устройство 41 подключен к второму инвертирующему входу пятого сумматора 32, вход пятого нелинейного блока 37 соединен с выходом датчика 9 угла крена, выход вычислителя 39 корректирующего сигнала перегрузки подключен к второму входу седьмого сумматора 34, выход которого является выходом вычислителя 15 сигнала заданной перегрузки при позиционном управлении.
В первом запоминающем устройстве 29 (фиг. 3) запоминается величина сигнала Хв в момент включения режима дозаправки («Дз»=1) при размыкании контактной группы третьего блока 26 коммутации сигналов. Первый нелинейный блок 27 ограничивает запомненный сигнал по уровню. Запомненный и ограниченный сигнал  поступает затем во второй нелинейный блок 28, в котором реализуется переменный коэффициент передачи в соответствии с табл. 1:
поступает затем во второй нелинейный блок 28, в котором реализуется переменный коэффициент передачи в соответствии с табл. 1:

Пример вида нелинейной зависимости второго нелинейного блока 28 при различных величинах запомненного значения РУС  представлен на фиг. 5 для следующих значений параметров табл. 1: Хmах=60 мм, Xmin=-120 мм,
представлен на фиг. 5 для следующих значений параметров табл. 1: Хmах=60 мм, Xmin=-120 мм,  - 60 мм,
- 60 мм,  =40 мм,
=40 мм,  =150 мм/ед. пер.,
=150 мм/ед. пер.,  =-0.9,
=-0.9,  =1.0.
=1.0.
Как видно из фиг. 5, при любом балансировочном значении РУС, имеющем место на момент включения режима дозаправки  значение избыточной заданной перегрузки
значение избыточной заданной перегрузки  всегда равно нулю. Из этого следует важный вывод о том, что при переходе управления со штатной СДУ на управление с предлагаемой системой управления не требуется перебалансировка РУС, требующая от летчика дополнительной психофизической нагрузки. При этом протяженность линейной зоны, определяемой величинами
всегда равно нулю. Из этого следует важный вывод о том, что при переходе управления со штатной СДУ на управление с предлагаемой системой управления не требуется перебалансировка РУС, требующая от летчика дополнительной психофизической нагрузки. При этом протяженность линейной зоны, определяемой величинами  и
и  и в которой обеспечивается требуемый градиент расхода РУС
и в которой обеспечивается требуемый градиент расхода РУС  на создание нормальной перегрузки, остается неизменной, что повышает качество пилотирования на этапе сближения самолета с танкером дозаправки.
на создание нормальной перегрузки, остается неизменной, что повышает качество пилотирования на этапе сближения самолета с танкером дозаправки.
В третьем запоминающем устройстве 41 (фиг. 4) запоминается значение сигнала угла тангажа ϑ в момент включения режима позиционного управления («Поз»=1) при размыкании контактных групп блока 31 коммутации сигналов. Таким образом на выходе сумматора 32 формируется сигнал угла тангажа относительно запомненного угла тангажа на момент включения режима, а в момент включения режима выходное значение сигнала на выходе сумматора 32 равно нулю.
Во втором запоминающем устройстве 40 (фиг. 4) запоминается величина сигнала Хв в момент включения режима позиционного управления («Поз»=1) при размыкании контактной группы четвертого блока 30 коммутации сигналов. Третий нелинейный блок 35 ограничивает запомненный сигнал по уровню. Запомненный и ограниченный сигнал  поступает затем в четвертый нелинейный блок 36, в котором реализуется переменный коэффициент передачи в соответствии с таблицей 2:
поступает затем в четвертый нелинейный блок 36, в котором реализуется переменный коэффициент передачи в соответствии с таблицей 2:

где,

Пример вида нелинейной зависимости четвертого нелинейного блока 36 при различных величинах запомненного значения РУС  представлен на фиг. 6 для следующих значений параметров таблицы 2: Хmax=60 мм, Xmin=-120 мм,
представлен на фиг. 6 для следующих значений параметров таблицы 2: Хmax=60 мм, Xmin=-120 мм,  =-65 мм,
=-65 мм,  =-50 мм,
=-50 мм,  =20 мм,
=20 мм,  =35 мм,
=35 мм,  =20 мм/градус,
=20 мм/градус,  =10 мм/градус, ϑmin=-12°, ϑmax=12°.
=10 мм/градус, ϑmin=-12°, ϑmax=12°.
Как следует из фиг. 6, при любом балансировочном значении РУС, имеющем место на момент включения режима позиционного управления при дозаправке  значения заданного угла тангажа
значения заданного угла тангажа  всегда равно нулю. Учитывая, что на выходе сумматора 32 в начальный момент формируется также нулевое значение сигнала, получаем, что при переходе на позиционное управление в предлагаемой системе управления также нет необходимости в дополнительной перебалансировке РУС, требующей от летчика дополнительной психофизической нагрузки. При этом протяженность второго линейного участка
всегда равно нулю. Учитывая, что на выходе сумматора 32 в начальный момент формируется также нулевое значение сигнала, получаем, что при переходе на позиционное управление в предлагаемой системе управления также нет необходимости в дополнительной перебалансировке РУС, требующей от летчика дополнительной психофизической нагрузки. При этом протяженность второго линейного участка  в которой обеспечивается требуемый градиент расхода РУС
в которой обеспечивается требуемый градиент расхода РУС  на создание угла тангажа, а также протяженность первого
на создание угла тангажа, а также протяженность первого  и третьего
и третьего  линейных участков, в которых обеспечивается требуемый градиент расхода РУС
линейных участков, в которых обеспечивается требуемый градиент расхода РУС  на создание угла тангажа, остается неизменной, что повышает качество пилотирования на этапе контактирования штанги дозаправки с конусом. Введение дополнительных линейных участков (первого и третьего) позволяет обеспечить более плавное сопряжение различных участков нелинейной характеристики.
на создание угла тангажа, остается неизменной, что повышает качество пилотирования на этапе контактирования штанги дозаправки с конусом. Введение дополнительных линейных участков (первого и третьего) позволяет обеспечить более плавное сопряжение различных участков нелинейной характеристики.
В вычислителе 39 вычисляется текущее значение угла наклона траектории полета самолета. В вычислителе 40 рассчитывается поправочное значение вертикальной перегрузки Fкор для компенсации потери высоты при возникновении угла крена и угла наклона траектории самолета.
Конкретная реализация вычислителя 1 сигнала штатной статической СДУ выполняется индивидуально для конкретного серийно выпускаемого самолета. Пример структуры такого вычислителя представлен, в частности, в патенте ЛИИ №2055784 «Система автоматизированного управления для заправки самолета в воздухе».
Блок 24 ограничения скорости изменения входного сигнала предназначен для предотвращения выхода скоростной характеристики рулевого привода 2 на ограничение.
Численные значения коэффициентов усиления (передаточных чисел) в первом 16, втором 17, третьем 18 (фиг. 2) и четвертом 42 (фиг. 4) усилителях определяются для конкретного самолета в соответствии с его аэродинамическими характеристиками.
Система автоматизированного управления самолетом в продольном канале при дозаправке в воздухе работает следующим образом.
При больших удалениях самолета от танкера-заправщика летчик пилотирует самолет с использованием штатной статической СДУ 1. В этом случае сигнал «Дз» с выхода блока 10 формирования сигналов равен нулю («Дз»=0) и на вход СДУ через нормально замкнутые контакты блока 11 коммутации сигналов поступает сигнал с выхода датчика 4 перемещения РУС по тангажу (фиг. 1).
При достаточном сближении самолета с танкером-заправщиком (на удалении 20-30 метров) летчиком включается режим дозаправки. При этом:
- в блоке 10 формирования сигналов формируется сигнал «Дз»=1, под действием которого контактная группа блока 11 коммутации сигналов переводится в новое (верхнее) положение;
- сигнал «Поз» на выходе блока 10 формирования сигналов остается равным нулю («Поз»=0), контактная группа блока 12 коммутации сигналов остается в исходном (нижнем) положении;
- через нормально замкнутые контакты блока 12 коммутации сигналов выходной сигнал вычислителя 14 заданной перегрузки поступает на вход вычислителя 13 формирования сигнала UСТУ на отработку заданной перегрузки;
- сигнал UСТУ через переведенные в новое (верхнее) положение контакты блока 11 коммутации сигналов поступают на вход штатной СДУ 1.
За счет этого под действием перемещения летчиком РУС самолет отрабатывает перегрузку, задаваемую сигналом с выхода вычислителя 14, необходимую для сближения с танкером.
Для дальнейшей точной стыковки заправочной штанги самолета с конусом танкера-заправщика (на удалении 10-12 метров) летчиком дополнительно включается режим точного позиционирования. В этом случае:
- на выходе блока 10 формирования сигналов дополнительно вырабатывается сигнал «Поз»=1, сигнал «Дз» остается в прежнем состоянии («Дз»=1);
- контактная группа блока 11 коммутации сигналов остается в предыдущем (верхнем) положении;
- контактная группа блока 12 коммутации сигналов под действием сигнала «Поз»=1 переводится в новое (верхнее) положение;
- на вход вычислителя 13 формирования сигнала UCTУ на отработку заданной перегрузки поступает сигнал заданной перегрузки при точном позиционировании штанги с конусом танкера с выхода вычислителя 15;
- сигнал UСТУ через находящиеся в верхнем положении контакты блока 11 коммутации сигналов поступает на вход штатной СДУ 1.
За счет этого самолетом отрабатывается заданный угол тангажа, формируемый в вычислителе 15 сигнала заданной перегрузки при позиционном управлении под действием перемещения РУС летчиком.
Таким образом в системе автоматизированного управления самолетом в продольном канале при дозаправке в воздухе обеспечивается:
- точное дозирование перегрузки при дозаправке за счет использования контура отработки перегрузки с астатическим законом управления и повышенных градиентов перемещения РУС по перегрузке и тангажу, при этом потребные градиенты расхода РУС на создание нормальной перегрузки и угла тангажа задаются в явном виде и не зависят от режима полета;
- возможность достижения максимальных значений нормальной перегрузки (угла тангажа) при крайних положениях РУС, позволяющих экстренно отойти от танкера дозаправки в опасных ситуациях;
- исключение необходимости перебалансировки РУС в зависимости от режима полета, от выработки топлива, от конфигурации объекта на всех этапах выполнения дозаправки;
- повышение точности позиционирования и стыковки заправочной штанги самолета с конусом танкера-заправщика за счет использования управления самолетом по углу тангажа.
За счет этого повышается точность и безопасность выполнения дозаправки в воздухе, снижается психофизическая нагрузка на летчика при пилотировании самолета.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОГРАНИЧИТЕЛЬ ПРЕДЕЛЬНЫХ РЕЖИМОВ ПОЛЕТА МАНЕВРЕННОГО САМОЛЕТА ПО ПЕРЕГРУЗКЕ | 2019 |
|
RU2711040C1 |
| САМОЛЕТ С СИСТЕМОЙ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2011 |
|
RU2472672C1 |
| ОГРАНИЧИТЕЛЬ ПРЕДЕЛЬНЫХ РЕЖИМОВ ПОЛЕТА МАНЕВРЕННОГО САМОЛЕТА | 2019 |
|
RU2719711C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КУРСА | 2021 |
|
RU2768310C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В БОКОВОМ ДВИЖЕНИИ | 2017 |
|
RU2671063C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ДВУХКИЛЕВОГО ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КУРСА | 2020 |
|
RU2765837C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА С АДАПТИВНОЙ ПЕРЕКРЕСТНОЙ СВЯЗЬЮ | 2019 |
|
RU2736400C1 |
| СИСТЕМА ПРОДОЛЬНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2021 |
|
RU2769452C1 |
| ДИСТАНЦИОННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ МАНЕВРЕННЫХ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2645589C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2537201C2 |
Система автоматизированного управления самолетом в продольном канале при дозаправке в воздухе содержит вычислитель сигнала статической системы дистанционного управления (СДУ), рулевой привод стабилизатора (руля высоты), стабилизатор (руль высоты), датчик положения ручки управления по тангажу, датчик угловой скорости тангажа, датчик угла атаки, датчик нормальной перегрузки, датчик угла тангажа, датчик угла крена, блок формирования сигналов переключения по командам от летчика, пять блоков коммутации сигналов, вычислитель сигнала контура отработки нормальной перегрузки, вычислитель сигнала заданной перегрузки при сближении самолета с танкером, вычислитель сигнала заданной перегрузки при позиционном управлении, четыре усилителя сигналов, семь сумматоров, интегратор, блок ограничения скорости изменения входного сигнала, блок постоянного единичного сигнала, пять нелинейных блоков, три запоминающих устройства, вычислитель угла наклона траектории полета самолета, вычислитель корректирующего сигнала перегрузки, соединенные определенным образом. Обеспечивается повышение точности и безопасности выполнения дозаправки в воздухе. 3 з.п. ф-лы, 6 ил., 2 табл.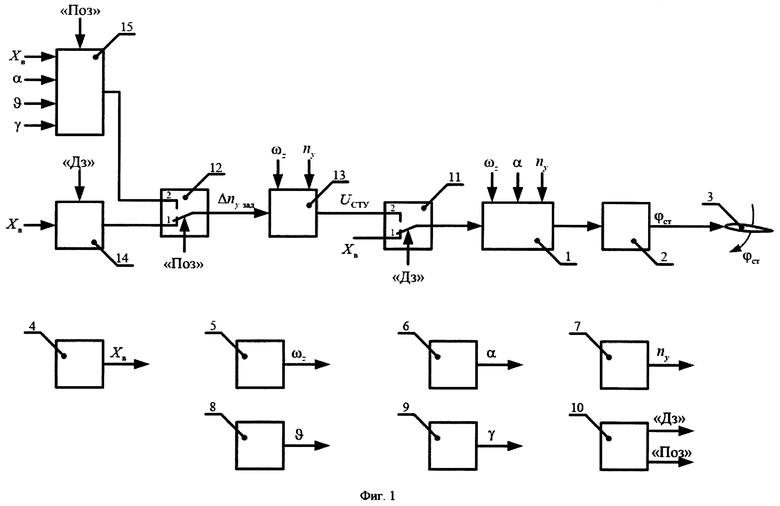
1. Система автоматизированного управления самолетом в продольном канале при дозаправке в воздухе, содержащая вычислитель сигнала статической системы дистанционного управления (СДУ), рулевой привод стабилизатора (руля высоты), вход которого подключен к выходу вычислителя сигнала статической СДУ, стабилизатор, соединенный с рулевым приводом, датчик положения ручки управления по тангажу, датчик угловой скорости тангажа, датчик угла атаки, датчик нормальной перегрузки, датчик угла тангажа, датчик угла крена, блок формирования сигналов «Дз» и «Поз» переключения по командам от летчика, первый и второй блоки коммутации сигналов, вычислитель сигнала контура отработки нормальной перегрузки, на входы которого поступают сигналы с выходов второго блока коммутации сигналов, датчика угловой скорости тангажа и датчика нормальной перегрузки, вычислитель сигнала заданной перегрузки при сближении самолета с танкером, на входы которого поступают сигналы с датчика положения ручки управления по тангажу и блока формирования сигналов переключения, вычислитель сигнала заданной перегрузки при позиционном управлении, на входы которого поступают сигналы с выходов датчика положения ручки управления по тангажу, датчика угла атаки, датчика угла тангажа, датчика угла крена и блока формирования сигналов переключения, при этом на входы вычислителя статической СДУ поступают сигналы с выходов первого блока коммутации сигналов, датчика угловой скорости тангажа, датчика угла атаки и датчика нормальной перегрузки, выход датчика положения ручки управления по тангажу соединен с первым входом первого блока коммутации сигналов, сигнал с выхода вычислителя сигнала контура отработки нормальной перегрузки поступает на второй вход первого блока коммутации сигналов, а на управляющий вход первого блока коммутации сигналов поступает сигнал «Дз» с выхода блока формирования сигналов переключения, выход вычислителя сигнала заданной перегрузки при сближении самолета с танкером соединен с первым входом второго блока коммутации сигналов, выход вычислителя сигнала заданной перегрузки при позиционном управлении соединен со вторым входом второго блока коммутации сигналов, а на управляющий вход второго блока коммутации сигналов поступает сигнал «Поз» с выхода блока формирования сигналов переключения.
2. Система автоматизированного управления самолетом в продольном канале при дозаправке в воздухе по п. 1, отличающаяся тем, что вычислитель сигнала контура отработки нормальной перегрузки содержит первый, второй и третий усилители сигналов (передаточные числа), первый, второй, третий и четвертый сумматоры, интегратор, блок ограничения скорости изменения входного сигнала и блок постоянного единичного сигнала, первый инвертирующий и второй входы первого сумматора подключены соответственно к выходам первого блока коммутации сигналов и к выходу второго сумматора, выход первого сумматора соединен с входами первого и второго усилителей сигналов, первый и второй инвертирующий входы второго сумматора соединены соответственно с выходом датчика перегрузки и с выходом блока постоянного единичного сигнала, первый и второй входы третьего сумматора подключены соответственно к выходам интегратора и четвертого сумматора, первый и второй входы четвертого сумматора соединены соответственно с выходами второго и третьего усилителей сигналов, вход третьего усилителя сигналов соединен с выходом датчика угловой скорости тангажа, выход первого усилителя сигналов соединен с входом интегратора, выход третьего сумматора подключен к входу блока ограничения скорости изменения входного сигнала, при этом выход блока ограничения скорости изменения входного сигнала является выходом вычислителя сигнала контура отработки нормальной перегрузки.
3. Система автоматизированного управления самолетом в продольном канале при дозаправке в воздухе по п. 1, отличающаяся тем, что вычислитель сигнала заданной перегрузки при сближении самолета с танкером содержит третий блок коммутации сигналов, на управляющий вход которого подается сигнал «Дз» с выхода блока формирования сигналов переключения, первый и второй нелинейные блоки и первое запоминающее устройство, вход которого подключен к выходу третьего блока коммутации сигналов, а выход соединен с входом первого нелинейного блока, первый и второй входы второго нелинейного блока соединены соответственно с выходами датчика положения ручки управления по тангажу и первого нелинейного блока, нормально замкнутый входной контакт третьего блока коммутации сигналов соединен с выходом датчика положения ручки управления по тангажу, а выход второго нелинейного блока является выходом вычислителя сигнала заданной перегрузки при сближении самолета с танкером.
4. Система автоматизированного управления самолетом в продольном канале при дозаправке в воздухе по п. 1, отличающаяся тем, что вычислитель сигнала заданной перегрузки при позиционном управлении содержит четвертый и пятый блоки коммутации сигналов, на управляющие входы которых подается сигнал «Поз» с выхода блока формирования сигналов переключения, пятый, шестой и седьмой сумматоры, третий, четвертый и пятый нелинейные блоки, вычислитель угла наклона траектории полета самолета, вычислитель корректирующего сигнала перегрузки, первый и второй входы которого соединены соответственно с выходом вычислителя угла наклона траектории полета самолета и с выходом пятого нелинейного блока, второе и третье запоминающие устройства, четвертый усилитель сигнала (передаточное число), вход которого подключен к выходу шестого сумматора, а выход которого соединен с первым входом седьмого сумматора, выход четвертого блока коммутации сигналов через последовательно соединенные второе запоминающее устройство и третий нелинейный блок соединен с первым входом четвертого нелинейного блока, второй вход которого подключен к выходу датчика положения ручки управления по тангажу, входной нормально замкнутый контакт четвертого блока коммутации сигналов соединен с выходом датчика положения ручки управления по тангажу, первый и второй инвертирующий входы шестого сумматора подключены соответственно к выходу четвертого нелинейного блока и к выходу пятого сумматора, первый вход которого и нормально замкнутые входные контакты пятого блока коммутации сигналов соединены с выходом датчика угла тангажа, выход пятого блока коммутации сигналов через третье запоминающее устройство подключен к второму инвертирующему входу пятого сумматора, вход пятого нелинейного блока соединен с выходом датчика угла крена, выход вычислителя корректирующего сигнала перегрузки подключен к второму входу седьмого сумматора, выход которого является выходом вычислителя сигнала заданной перегрузки при позиционном управлении.
| RU 2055784 C1, 10.03.1996 | |||
| US 9663219 B2, 30.05.2017 | |||
| Способ интеллектуальной поддержки экипажа | 2020 |
|
RU2767406C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327602C1 |
| US 11378988 B2, 05.07.2022 | |||
| US 10816970 B2, 27.10.2020. | |||

