Изобретение относится к авиационной технике, в частности к системам заправки самолетов топливом в полете, и может быть использовано для обеспечения летчику заправляемого самолета возможности контролировать взаимное расположение заправочного конуса и топливоприемника и скорость их сближения в процессе контактирования при заправке как в ручном, так и автоматическом режиме.
Изобретение также может быть использовано в случаях, когда необходимо контролировать изменение расстояний между подвижными объектами, например между самолетами при полете в строю, между взлетно-посадочной полосой (ВПП) и самолетом при его приземлении, между речными и/или морскими судами при проходе в узких проливах или каналах и т.п.
Заправку самолетов в полете осуществляют с целью увеличения дальности полета или времени их нахождения в воздухе. Наиболее распространена система заправки с гибким шлангом. На заправляемом самолете имеется топливоприемник (штанга с наконечником), а на самолете-заправщике - топливный насос и барабан с гибким шлангом, на конце которого укреплен заправочный конус. Перед заправкой в полете на самолете-заправщике выпускают шланг с конусом. Заправляемый самолет пристраивают к заправщику и вводят топливоприемник в конус, где он фиксируется замком. Затем включают насос для перекачки топлива из баков заправщика в баки заправляемого самолета. Практическое выполнение заправки самолетов топливом в полете требует высокого мастерства летчиков [1].
Наиболее ответственной операцией заправки самолета в полете является стыковка топливоприемника с конусом. Ее выполнение зависит от точности совмещения осей топливоприемника и конуса, а также выдерживания в процессе контактирования скорости полета заправляемого самолета в строго определенном диапазоне ее изменений. Поскольку инструментальный контроль параметров контактирования на заправляемых самолетах отсутствует, то все внимание летчика заправляемого самолета сосредоточено только на взаимном расположении конуса и топливоприемника и одновременном управлении тягой двигателя и пространственным положением самолета. В процессе контактирования, т.е. сближения топливоприемника с конусом с дистанции 15-10 м до 0, необходимо обеспечить точное управление самолетом по трем линейным координатам и скоростью его сближения с самолетом-заправщиком, причем точность выдерживания координат конуса должна быть не хуже 0,3-0,4 м, а скорость сближения должна превышать крейсерскую скорость самолета- заправщика на величину в диапазоне 1 -2 м/с.
Промах топливоприемника может привести к соударению конуса (масса которого 45-60 кг) с корпусом самолета, вследствие чего могут быть повреждения как конуса, так и конструкции самолета, в частности разрушение радиопрозрачного обтекателя. При меньшей скорости сближения и попадании топливоприемника в конус не срабатывает замок конуса, вследствие чего увеличивается время контактирования и происходит раскачка заправляемого самолета в возмущенном заправщиком потоке. При большей скорости сближения процесс становится слишком быстротечным и летчик не успевает навести топливоприемник на конус, а при попадании - происходит сильный толчок (удар) по конусу, что приводит к колебательному движению шланга ("эффект хлыста") и раскачке конуса в вертикальной плоскости, вследствие чего, как правило, происходит разрушение (облом) топливоприемника или обрыв шланга.
Поэтому успешная стыковка заправочных устройств (конуса и топливоприемника) при заправке в полете в определяющей мере зависит от мастерства и физиологического состояния летчика заправляемого самолета. Для отработки навыков в технике пилотирования, включая работу с двигателями при заправке в полете, на каждого летчика требуется не менее 10 тренировочных полетов с заправщиком без перекачки топлива, после чего вероятность контактирования достигает 0,6-0,95. Однако это связано со значительными материальными и финансовыми расходами на подготовку летного состава и не гарантирует 100-процентное контактирование с первого захода. Снижение требований к мастерству летчиков является основной проблемой практического выполнения заправки самолетов топливом в полете, чем и определяется развитие систем заправки с гибким шлангом.
Известное устройство управления пространственным положением конуса содержит установленный на топливоприемнике точечный источник света и установленные на конусе последовательно включенные 4-х квадрантный фотоприемник, устройство обработки сигналов и формирования команд управления, рулевую машинку. При этом конус снабжен установленными во взаимно перпендикулярных плоскостях ребрами с отклоняющимися пластинами (элеронами). Если оси конуса и топливоприемника не совпадают, устройство вырабатывает сигнал управления в рулевую машинку, которая отклоняет элероны, и конус перемещается в вертикальной плоскости, минимизируя величину взаимного отклонения осей конуса и топливоприемника [2].
Причиной, препятствующей достижению указанного ниже технического результата при использовании известного устройства, является отсутствие в нем информационного канала о скорости сближения топливоприемника с конусом. Размещение на конусе высокоточных оптико- электронных устройств снижает надежность системы заправки в целом.
Известно устройство управления конусом системы заправки в полете, содержащее укрепленные на топливоприемнике заправляемого самолета источники света и систему определения пространственного положения конуса и управления его положением относительно топливоприемника. Оборудование этой системы размещено на конусе и на борту самолета- заправщика. В качестве источника света использованы четыре лазерных диода или светодиода, установленные в корпусе в диаметрально противоположных точках. Лучи источника света съюстированы с осью топливоприемника. На юбке конуса в диаметрально противоположных точках закреплены четыре электрооптических датчика, каждый из которых состоит из микролинзы и фотодетектора. В качестве фотодетектора использован 4- х квадрантный фотодиод или микрокамера. "Вертикальная" и "горизонтальная" пары электрооптических датчиков взаимодействуют с соответствующими парами лазерных диодов, установленных на топливоприемнике. Фотодетекторы датчиков чувствительны к положению светового пятна на их поверхности. Таким образом, "вертикальные" и "горизонтальные" пары лазерных диодов на топливоприемнике и соответствующие пары электрооптических датчиков на конусе образуют систему определения координат положения конуса относительно топливоприемника в вертикальной и горизонтальной плоскостях. Выходы электрооптических датчиков подключены к расположенной на борту самолета-заправщика системе обработки сигналов и формирования команд управления пространственным положением конуса. В корпусе юбки конуса в плоскости, перпендикулярной оси конуса, в диаметрально противоположных точках установлены четыре газовые форсунки, сообщающиеся посредством трубопровода (шланга) с источником сжатого воздуха или газа, установленного на самолете-заправщике. Указанные газовые форсунки также образуют "вертикальную" и "горизонтальную" пары и входят в систему управления пространственным положением конуса.
Описанное устройство работает следующим образом. Излучаемые источником света лучи - два в вертикальной плоскости и два в горизонтальной - попадают на соответствующие электрооптические датчики, установленные на юбке конуса. При точном совмещении осей топливоприемника и конуса центры световых пятен от лазерных лучей совпадают с центрами чувствительных элементов фотодетекторов и сигналы на выходе датчиков отсутствуют. При изменении положения топливоприемника относительно конуса датчики вырабатывают сигналы рассогласования, пропорциональные величине отклонения оси топливоприемника в вертикальной и горизонтальной плоскостях. После соответствующей обработки вычислитель системы вырабатывает управляющие сигналы, которые приводят в действие соответствующие газовые форсунки. Под действием реактивных струи сжатого воздуха конус перемещается в вертикальной и горизонтальной плоскостях вслед за топливоприемником до момента совмещения их осей [3].
Достижению указанного ниже технического результата при использовании известного устройства препятствуют следующие причины. Датчики, установленные на юбке конуса, являются высокоточными приборами и в случае выхода из строя хотя бы одного из них устройство становится неработоспособным. Кроме того, в результате даже легкого удара топливоприемником по юбке или столкновения конуса с заправляемым самолетом при промахе они могут быть повреждены. Все это снижает надежность работы всей системы заправки. Заправочный конус находится в мощном воздушном потоке и благодаря своей конструкции обладает значительной инерционностью. Для его перемещения перпендикулярно потоку требуется большой расход сжатого воздуха или газа через форсунки, что усложняет систему заправки, т.к. требуется дополнительный шланг, устройство управления форсунками. Учитывая массу конуса (45-60 кг) и его аэродинамические качества, время перемещения конуса в новое положение может быть значительным (порядка единиц минут), что увеличивает время контактирования и затрудняет управление пространственным положением и скоростью сближения заправляемого самолета в оптимальном режиме. Поскольку контроль пространственного положения конуса относительно топливоприемника и управление конусом осуществляется с самолета-заправщика, то летчику заправляемого самолета отводится роль пассивного наблюдателя процесса наведения конуса на топливоприемник. Сближение с конусом он может начать только по команде с самолета-заправщика. Т. к. прямая или косвенная информация о скоростных параметрах сближения с конусом у летчика отсутствует, то, управляя скоростью сближения, он должен полагаться лишь на свое мастерство и интуицию.
Задачей, на решение которой направлено заявленное изобретение, является разработка и создание простого и надежного средства, позволяющего автоматизировать процесс заправки самолетов топливом в полете с одновременным обеспечением летчика заправляемого самолета визуальной информацией о пространственных и скоростных параметрах сближения самолета с заправочным конусом, что повышает вероятность заправки с первого захода в любое время суток, особенно в условиях вечерних сумерек и ночи, и снижает требования к квалификации летчиков.
Технический результат, достигаемый при осуществлении изобретения, заключается в повышении точности наведения топливоприемника на центр конуса и управления скоростью сближения заправляемого самолета с конусом в процессе контактирования.
Указанный технический результат при осуществлении изобретения достигается тем, что в известное устройство заправки самолетов топливом в полете, содержащее установленный на заправляемом самолете источник света, лучи которого съюстированы с осью топливоприемника. введены блок управления, инфракрасный лазерный оптический модуль, видеокамера с подключенным к ее выходу видеоконтрольным устройством, вычислитель координат заправочного конуса, причем источник света, инфракрасный лазерный оптический модуль и видеокамера связаны с блоком управления, выход которого соединен с первым входом вычислителя координат заправочного конуса, который своими вторым входом соединен с выходом видеокамеры, первым выходом - с блоком управления, вторым выходом - с автоматической системой управления самолетом и третьим выходом - с видеоконтрольным устройством, при этом источник света выполнен в виде среднего и двух боковых лазерных оптических модулей, причем боковые модули установлены с возможностью углового перемещения относительно среднего модуля, а оптические оси инфракрасного лазерного оптического модуля и видеокамеры также съюстированы с осью топливоприемника.
Инфракрасный, средний и боковые лазерные оптические модули выполнены идентично и каждый из них содержит смонтированные на общей оптической оси в цилиндрическом корпусе оптическую систему, лазерный излучатель с встроенным фотодиодом, при этом боковые лазерные оптические модули снабжены осью вращения.
Блок управления содержит первый и второй модуляторы яркости лазерных лучей, последовательно соединенные блок контроля, пульт управления, блок питания, устройство разведения боковых лазерных оптических модулей, причем первые входы первого и второго модуляторов подключены ко второму и третьему выходам блока питания, вторые входы и первые выходы первого и второго модуляторов подключены соответственно ко второму, третьему выходам и первому, второму входам блока контроля, третий вход которого соединен с четвертым выходом блока питания, а второй выход пульта управления соединен с вторым входом устройства разведения боковых лазерных оптических модулей, при этом исполнительный орган устройства разведения боковых лазерных оптических модулей кинематически связан с корпусами боковых лазерных оптических модулей, второй выход первого модулятора соединен с входом среднего лазерного оптического модуля, второй выход второго модулятора соединен с входом одного бокового лазерного оптического модуля, пятый, шестой и седьмой выходы блока питания соединены соответственно с первыми входами другого бокового лазерного оптического модуля, инфракрасного лазерного оптического модуля и видеокамеры, выходы боковых, среднего и инфракрасного лазерных оптических модулей и первый выход видеокамеры подключены соответственно к четвертому, пятому, шестому, седьмому и восьмому входам блока контроля, четвертый, пятый и шестой выходы которого соединены соответственно с вторыми входами другого бокового лазерного оптического модуля, инфракрасного лазерного оптического модуля и видеокамеры.
Вычислитель координат заправочного конуса содержит блок выбора порога, постоянное запоминающее устройство, последовательно включенные пороговое устройство, устройство интерполяции, коррелятор, первый арифметический блок расчета координат, второй арифметический блок расчета координат, первый фильтр, дифференциатор, второй фильтр, блок сравнения, блок выработки управляющих сигналов, буферный блок, причем второй выход коррелятора соединен с входом блока выбора порога, выход которого подключен к второму входу порогового устройства, первый вход которого является входом вычислителя, первый, второй и третий выходы постоянного запоминающего устройства подключены соответственно ко вторым входам устройства интерполяции, второго арифметического блока расчета координат и блока сравнения, к третьему входу которого подключен выход первого фильтра.
Укажем на причинно-следственные связи признаков устройства с указанным выше техническим результатом. Видеокамера, оптическая ось которой съюстирована с осью топливоприемника, и видеоконтрольное устройство, на экране которого центр координатной сетки индицирует ось топливоприемника, обеспечивают летчику заправляемого самолета возможность предварительного наведения на заправочный конус на расстоянии, превышающем дистанцию контактирования, а затем легко и быстро нацелить ось топливоприемника в центр заправочного конуса. Для этого летчику, управляя пространственным положением самолета, нужно наложить координатную сетку на изображение юбки заправочного конуса. Инфракрасный лазерный оптический модуль обеспечивает подсветку заправочного конуса в плохих условиях его визуального наблюдения или при недостаточной контрастности контура конуса на фоне неба. Лазерные оптические модули формируют световые лучи заданной конфигурации, которые летчик совмещает с контуром конуса. Блок управления обеспечивает программное разведение боковых лучей от их исходного (параллельного друг другу) положения на равные углы со скоростью, пропорциональной оптимальной для данного типа самолета скорости сближения с конусом. Летчик управляет самолетом в горизонтальной и вертикальной плоскостях и его скоростью так, чтобы в процессе сближения с конусом световые пятна от боковых лучей не выходили за пределы ширины юбки конуса. Удержание конфигурации световых пятен на конусе в неизменном виде в процессе контактирования вынуждает летчика заправляемого самолета поддерживать скорость сближения с конусом, близкой к оптимальной. Это обусловлено тем, что синхронное разведение боковых лучей жестко связано с изменением расстояния между заправляемым самолетом и конусом и осуществляется независимо от воли летчика. В автоматическом режиме принцип действия устройства разведения боковых лучей не меняется. С помощью видеокамеры измеряются угловые промахи и текущее расстояние до заправочного конуса, что особенно важно в тех случаях, когда последний освещен солнцем и световые пятна от лазерных лучей на нем мало заметны. При этом разведение боковых лучей осуществляется по сигналам, пропорциональным требуемой скорости сближения в соответствии с непрерывно измеряемым вычислителем координат заправочного конуса расстоянием до него. Вычислитель также формирует пропорциональные скорости сближения и величинам отклонения оси топливоприемника в вертикальной плоскости от заданного направления сигналы управления, которые подаются в систему автоматического управления самолетом. Летчик в этом случае контролирует процесс контактирования визуально, наблюдая положение световых пятен на заправочном конусе, и по изображению на видеоконтрольном устройстве и в любой момент может взять управление самолетом на себя.
Проведенный заявителем анализ уровня техники показал, что в выявленных источниках патентной и научно-технической информации решения характеризующиеся признаками, тождественными всем признакам заявленного изобретения, отсутствуют, а изобретение явным образом из уровня техники не следует. Это дает основания полагать, что заявленное изобретение соответствует условию патентоспособности "новизна" и "изобретательский уровень".
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена структурная схема устройства контроля заправки самолета топливом в полете; на фиг. 2 показано устройство лазерного оптического модуля; на фиг. 3 представлена структурная схема блока управления; на фиг. 4 представлена структурная схема модулятора яркости лазерного луча (схемы первого и второго модуляторов яркости лазерных лучей идентичны); на фиг. 5 представлена структурная схема блока контроля; на фиг. 6 представлена структурная схема устройства разведения боковых лазерных оптических модулей; на фиг. 7 показан принцип разведения боковых лазерных оптических модулей; на фиг. 8 представлена структурная схема вычислителя координат заправочного конуса; на фиг. 9 показано пространственное положение заправочных элементов и лазерных лучей; на фиг. 10 представлены изображения на экране видеоконтрольного устройства при различных расстояниях между заправляемым самолетом и конусом; на фиг. 11 представлены эпюры модуляции среднего и одного бокового лазерных лучей; на фиг. 12 изображены конфигурации световых пятен от лазерных лучей на конусе (сплошная затушевка - световое пятно от немодулированного луча, штриховка - световое пятно от модулированного луча; на фиг. 13 показан диапазон изменения относительной скорости сближения (ΔVc) заправляемого самолета с конусом в зависимости от расстояния между ними.
Согласно изобретению, устройство контроля заправки самолета топливом в полете (фиг. 1) содержит установленные на заправляемом самолете источник света 1, инфракрасный лазерный оптический модуль (ИЛОМ) 5, видеокамеру (ВК) 6, блок управления (БУ) 7, вычислитель координат заправочного конуса (ВКК) 8, видеоконтрольное устройство (ВКУ) 9. Источник света 1, ИЛОМ 5 и ВК 6 подключены к БУ 7, к которому подключен ВКК 8, выходы которого соединены с ВКУ 9, системой автоматического управления самолетом (САУ) и с индикатором на лобовом стекле кабины самолета (ИЛС) при его наличии. Входы ВКК 8 и ВКУ 9 также связаны с выходом ВК 6.
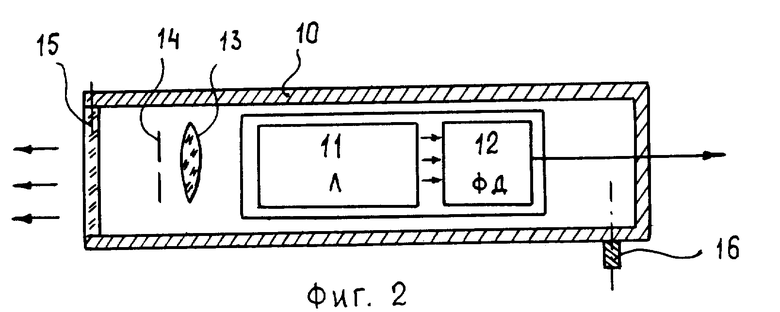
Источник света 1 выполнен в виде трех идентичных лазерных оптических модулей - двух боковых (БЛОМ) 2 и 4 и среднего (СЛОМ) 3. Идентично им выполнен и ИЛОМ 5. Лазерный оптический модуль (фиг.2) содержит корпус 10, в котором на общей оптической оси установлены лазер 11 с встроенным фотодиодом (ФД) 12, объектив 13 и маска 14. Открытый конец корпуса 10 снабжен светопрозрачным защитным обтекателем 15. В качестве лазера использован малогабаритный полупроводниковый лазер, например типа SPL-ЗОЗО, с встроенным фотодиодом. ФД 12 служит для контроля мощности излучения лазера. Маска 14 выполнена в виде непрозрачной пластины с продольным прямоугольным отверстием в ее центральной части для БЛОМ 2, 4 и СЛОМ 3 и круглым отверстием для ИЛОМ 5. Отверстие в маске 14 СЛОМ 3 ориентировано перпендикулярно отверстиям в масках 14 БЛОМ 2 и 4, которые установлены параллельно друг другу. При этом в пространстве формируется диаграмма излучения источника света 1 в виде двух параллельных друг другу боковых и перпендикулярного им в их центральной зоне лучей. При попадании лучей на предмет световые пятна от них образуют на его поверхности фигуру вида  или "I-I". Более предпочтителен вид "I-I", т.к. человеческий глаз более чувствителен к горизонтальным перемещениям световых пятен. Лучи БЛОМ 2, 4 и СЛОМ 3 имеют красный или желто-зеленый цвет, к которым человеческий глаз наиболее чувствителен.
или "I-I". Более предпочтителен вид "I-I", т.к. человеческий глаз более чувствителен к горизонтальным перемещениям световых пятен. Лучи БЛОМ 2, 4 и СЛОМ 3 имеют красный или желто-зеленый цвет, к которым человеческий глаз наиболее чувствителен.
БЛОМ 2 и 4 выполнены с возможностью углового перемещения относительно исходного положения, при котором продольные оси всех трех лазерных оптических модулей параллельны. Для этого БЛОМ 2 и 4 снабжены осью вращения 16. СЛОМ 3 закреплен неподвижно. Лазерные оптические модули 2-5 и видеокамера (ВК) 6 установлены с возможностью юстировки на общей монтажной плите, которая крепится на корпусе топливоприемника или вблизи него. ВКУ 9 установлено в кабине самолета в месте, удобном для его использования летчиком.
Юстировку источника света 1, ИЛОМ 5 и ВК 6 с осью топливоприемника осуществляют следующим образом. Вначале путем индивидуальной юстировки лазерных оптических модулей 2-5 и ВК 6 устанавливают параллельность их оптических осей, формируют требуемую диаграмму излучения источника света 1 (световое пятно вида "I-I"). Затем с помощью юстировки монтажной плиты добиваются правильного пространственного положения диаграммы излучения относительно оси самолета. При этом компенсируют угол атаки самолета и несоосность топливоприемника относительно строительной оси самолета. В результате лазерные лучи и оптическая ось ВК 6 ориентируются практически горизонтально, а в вертикальной плоскости - симметрично продольной оси самолета. Указанная юстировка может быть осуществлена один раз при установке оборудования на самолет и в дальнейшем может только проверяться перед полетом.
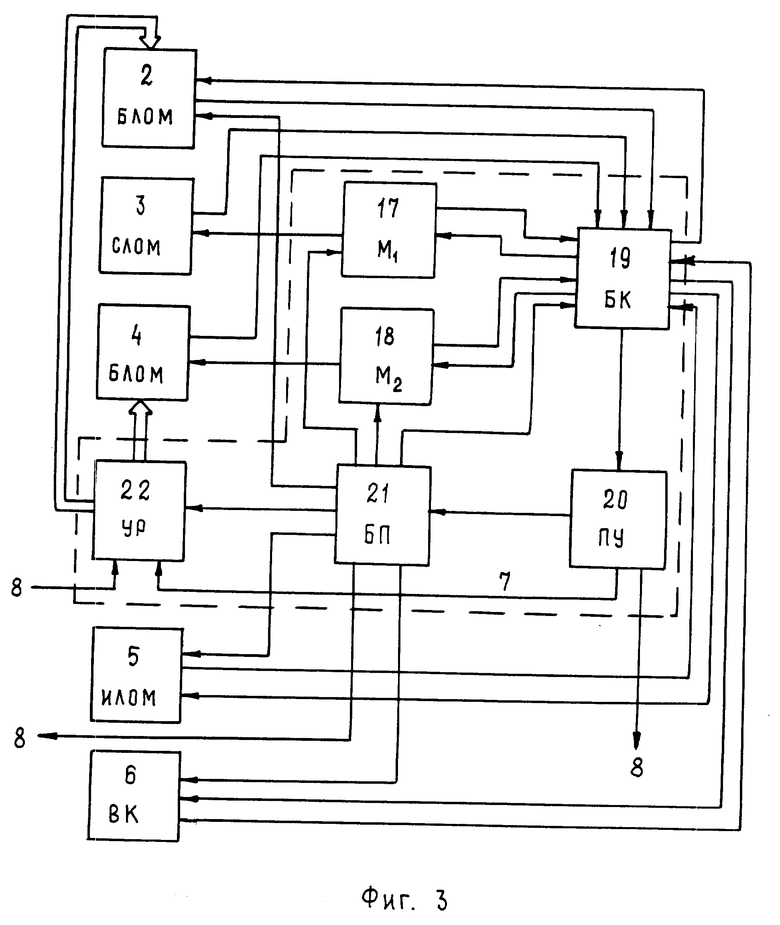
Блок управления (БУ) 7 содержит (фиг. 3) первый (M1) 17 и второй (M2) 18 модуляторы яркости лазерных лучей, последовательно соединенные блок контроля (БК) 19, пульт управления (ПУ) 20, блок питания (БП) 21, устройство разведения боковых лазерных оптических модулей (УР) 22. Первые входы первого M1 17 и второго M2 18 модуляторов подключены ко второму и третьему выходам БП 21, а их вторые входы - соответственно ко второму и третьему выходам БК 19. Первые выходы первого M1 17 и второго M2 18 модуляторов подключены соответственно к первому и второму входам БК 19, третий вход которого соединен с четвертым выходом БП 21. Второй выход ПУ 20 соединен с вторым входом УР 22.
При этом БУ 7 связан с остальными элементами устройства следующим образом. Исполнительный орган УР 22 кинематически связан с корпусами боковых лазерных оптических модулей (БЛОМ 2 и 4). Второй выход первого модулятора M1 17 соединен с входом среднего лазерного оптического модуля (СЛОМ 3), второй выход второго модулятора M2 18 соединен с входом одного бокового лазерного оптического модуля (например БЛОМ 4). Пятый, шестой и седьмой выходы БП 21 соединены соответственно с первыми входами другого бокового лазерного оптического модуля (БЛОМ 2), инфракрасного лазерного оптического модуля (ИЛОМ 5) и видеокамеры (ВК 6). Выходы БЛОМ 2 и 4, СЛОМ 3, ИЛОМ 5 и первый выход ВК 6 подключены соответственно к четвертому, пятому, шестому, седьмому и восьмому входам БК 19, четвертый, пятый и шестой выходы которого соединены соответственно с вторыми входами БЛОМ 2, ИЛОМ 5 и ВК 6. Кроме того, третий выход ПУ 20, восьмой выход БП 21 и третий вход УР 22 соединены с вычислителем координат заправочного конуса (ВКК 8).
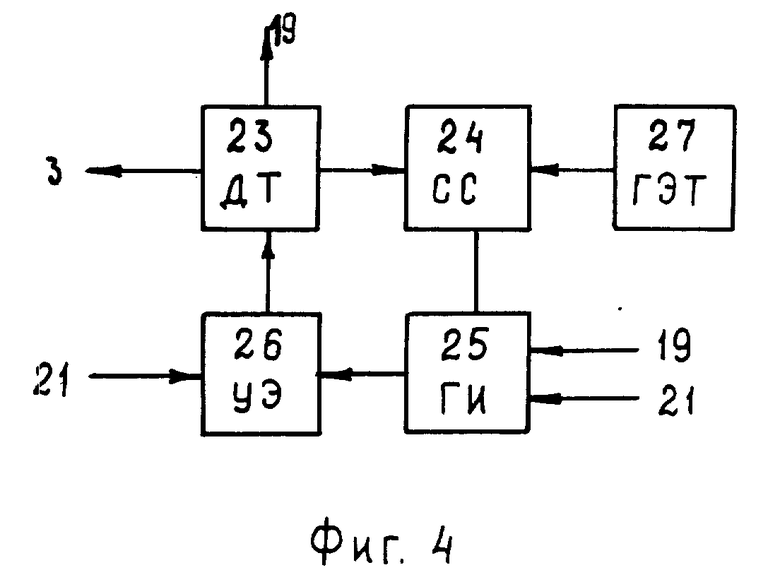
Модуляторы M1 17 и M2 18 выполнены по идентичным схемам и каждый из них содержит (фиг. 4) последовательно включенные детектор тока (ДТ) 23, схему сравнения (СС) 24, генератор импульсов (ГИ) 25, управляющий элемент (УЭ) 26, выход которого соединен с ДТ 23. Ко второму входу СС 24 подключен генератор эталонного тока (ГЭТ) 27. При этом вторые выходы ДТ 23 первого модулятора 17 и второго модулятора 18 подключены соответственно к входам СЛОМ 3 и БЛОМ 4, а третьи выходы подключены к БК 19 БУ 7. Второй вход ГИ 25 первого модулятора 17 соединен со вторым выходом БК 19 блока управления (БУ) 7, а третий вход ГИ 25 и второй вход УЭ 26 соединены со вторым выходом БП 21 БУ 7. Аналогично второй вход ГИ 25 второго модулятора 18 соединен с третьим выходом БК 19 БУ 7, а третий вход ГИ 25 и второй вход УЭ 26 соединены с третьим выходом БП 21 БУ 7.
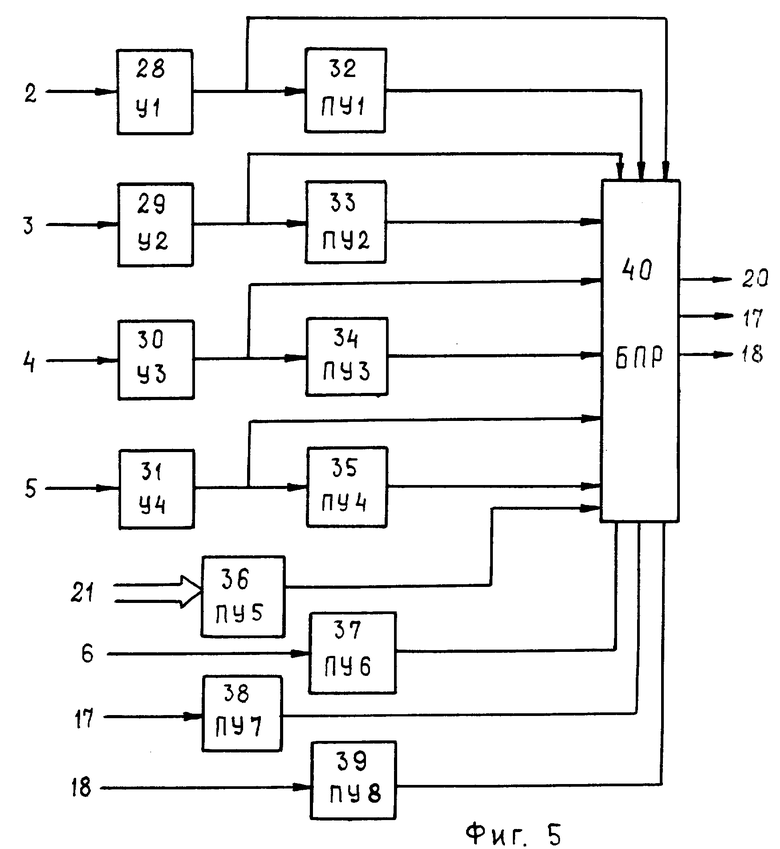
Блок контроля (БК) 19 содержит (фиг.5) последовательно вьюченные: усилитель тока ФД 12 БЛОМ 2 (У1) 28 и первое пороговое устройство (ПУ 1) 32; усилитель тока ФД 12 СЛОМ 3 (У2) 29 и второе пороговое устройство (ПУ2) 33; усилитель тока ФД 12 БЛОМ 4 (УЗ) 30 и третье пороговое устройство (ПУЗ) 34; усилитель тока ФД 12 ИЛОМ 5 (31) н четвертое пороговое устройство (ПУ4) 35; пятое (ПУЗ) 36, шестое (ПУ6) 37, седьмое (ПУ7) 38 и восьмое (ПУ8) 39 пороговые устройства; блок принятия решения (БПР) 40. При этом выходы У1 28, У 2 29, УЗ 30, У4 31 помимо связи с соответствующими ПУ1 32, ПУ2 33, ПУЗ 34 и ПУ4 35 соединены с первым, вторым, третьим и четвертым входами БПР 40, к пятому, шестому, седьмому и восьмому входам которого подключены выходы ПУ1 32, ПУ2 33, ПУЗ 34 и ПУ4 35, а к девятому, десятому, одиннадцатому и двенадцатому входам подключены выходы соответственно ПУЗ 36, ПУ6 37, ПУ7 38 и ПУ8 39. При этом вход ПУ5 36 соединен с блоком питания (БП) 21, вход ПУ6 37-е выходом видеокамеры (ВК) 6, вход ПУ7 38 - с датчиком тока (ДТ) 23 первого модулятора яркости лазерного луча M1 17, вход ПУ8 39-с ДТ 23 второго модулятора МЮЯ 18. Первый и второй выходы БПР 40 соединены со вторыми входами генератора импульсов (ГИ) 25 соответственно первого М1 17 и второго М2 18 модуляторов, а третий выход - с пультом управления (ПУ) 20.
Блок принятия решения (БПР) 40 представляет собой электронное решающее устройство, вырабатывающее выходной сигнал в зависимости от знака и величины отклонения входного сигнала от порогового значения, и строится по известным правилам инженерного проектирования.
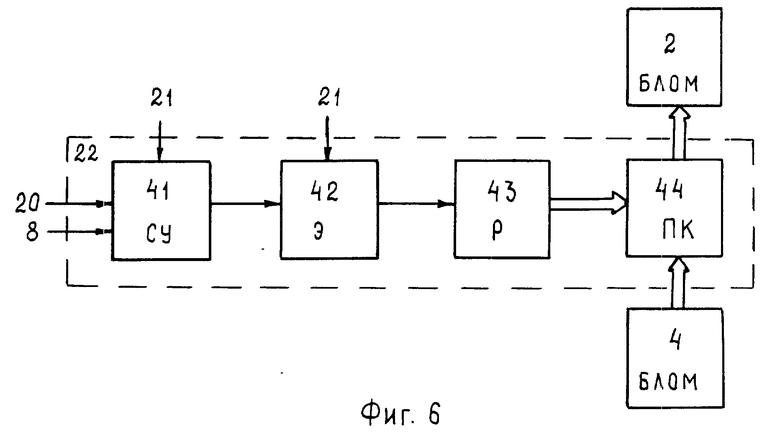
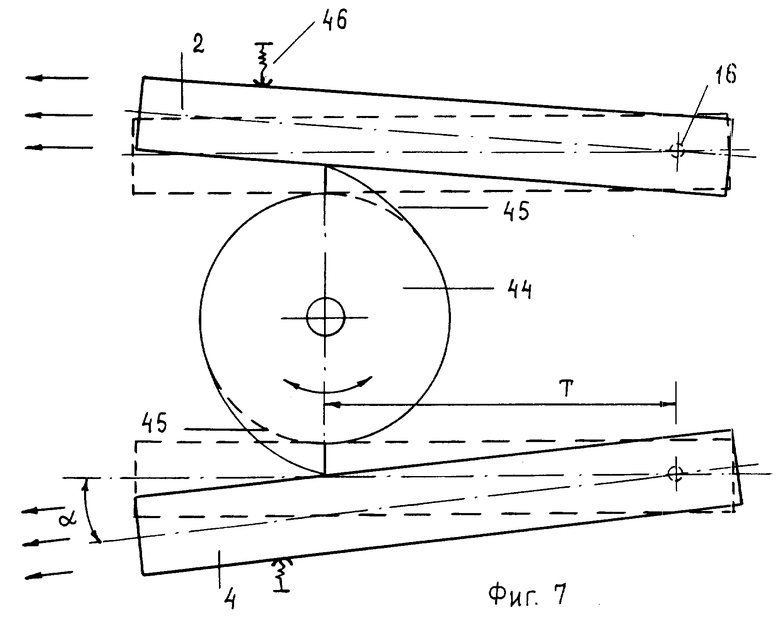
Устройство разведения боковых лазерных оптических модулей (УР 22, фиг.6) содержит последовательно включенные схему управления (СУ) 41, электропривод (ЭП) 42, редуктор (Р) 43, который кинематически, например при помощи червячной передачи, связан с исполнительным механизмом 44. В качестве ЭП 42 использован шаговый мотор. СУ 41 входит в комплект заводской поставки шагового мотора. Исполнительный механизм 44 выполнен в виде профилированного кулачка (ПК), который представляет собой диск с диаметрально расположенными и противоположно направленными профильными выступами 45, которые кинематически взаимодействуют (контактируют) с корпусами БЛОМ 2 и БЛОМ 4 (фиг.7). При этом первый вход СУ 41 подключен к ПУ 20, второй вход - к выходу вычислителя координат заправочного конуса (ВКК) 8, третий вход - к БП 21, к которому также подключен второй вход ЭП 42. Величина радиуса диска ПК 44 выбрана из условия обеспечения параллельности световых пятен от боковых лазерных лучей и попадания их на юбку заправочного конуса с дистанции контактирования (когда БЛОМ 2 и БЛОМ 4 находятся в исходном положении, т.е. параллельны между собой - показано пунктиром). Радиус r кривизны профильных выступов 45 определяется по формуле:
r=T•(Rk/l
где
T - расстояние от оси вращения 16 БЛОМа до точки контакта его корпуса с профильным выступом 45 кулачка 44;
Rk - радиус фронтальной проекции конуса;
l - расстояние между заправляемым самолетом и конусом.
Для обеспечения возвращения отклоненных БЛОМ 2 и 4 в исходное положение (параллельное друг другу и СЛОМ 3) служит пружинный механизм 46.
Пульт управления (ПУ) 20 выполнен на типовых элементах по правилам инженерного проектирования и эргономики. Он установлен в кабине летчика и позволяет ему включать устройство, управлять всеми блоками, оценивать их работоспособность. Индикация соответствующих режимов работы устройства может быть выведена на лобовое стекло кабины самолета (ИЛС).
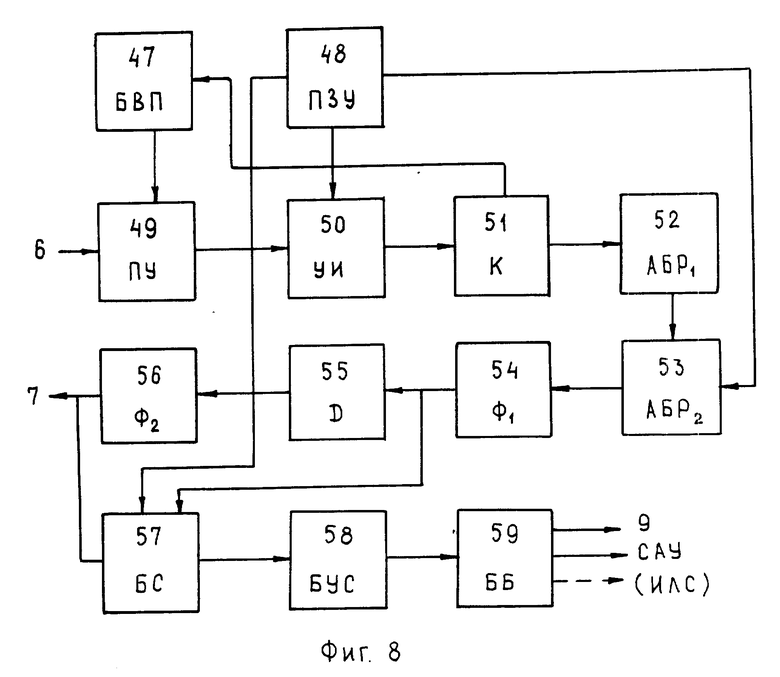
Вычислитель координат заправочного конуса (ВКК) 8 содержит (фиг.8) блок выбора порога (ВВП) 47, постоянное запоминающее устройство (ПЗУ) 48, последовательно соединенные пороговое устройство (ПУ) 49, устройство интерполяции (УИ) 50, коррелятор (К) 51, первый арифметический блок расчета координат (АБР2) 52, второй арифметический блок расчета координат (АБР2 53, первый фильтр (Ф1) 54, дифференциатор (Д) 55, второй фильтр (Ф2) 56, блок сравнения (БС) 57, блок выработки управляющих сигналов (БУС) 58, буферный блок (ББ) 59. Второй выход К 51 соединен с входом ВВП 47, выход которого подключен ко второму входу ПУ 49, первый вход которого является входом вычислителя. Первый выход ПЗУ 48 подключен ко второму входу УИ 50, второй выход - ко второму входу АБР2 53, третий выход - ко второму входу БС 57, к третьему входу которого подключен выход Ф1 54. При этом первый вход порогового устройства (ПУ) 49 соединен с выходом видеокамеры (ВК) 6, выход Ф2 56 подключен ко второму входу СУ 41 У Р 22 блока управления (БУ) 7, первый выход буферного блока (ББ) 59 подключен к системе автоматического управления самолетом (САУ), второй выход - к ВКУ 9, а третий выход - ИЛС при его наличии.
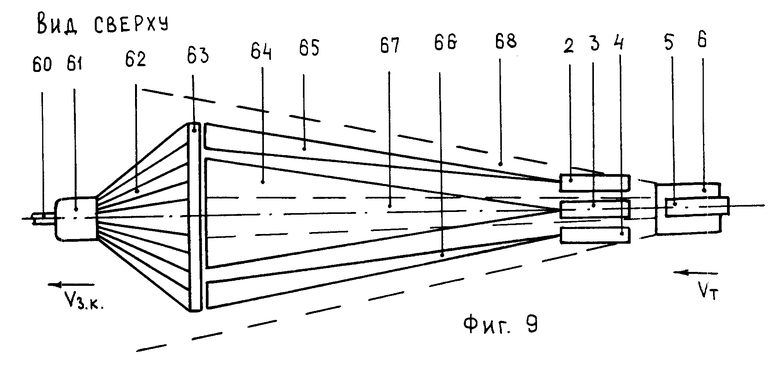
Описанное устройство работает следующим образом. При включенном БП 21 по сигналу с ПУ 20 на лазеры 11 лазерных оптических модулей 2-5 подается ток накачки. БЛОМ 2, 4 и СЛОМ 3 начинают излучать свет, например, в красном диапазоне спектра (длина волны λ = 0,64 мкм, мощность излучения Р=30 мВт). Луч полупроводникового лазера в поперечном сечении имеет форму вытянутого эллипса. Объектив 13 (фиг. 2) фокусирует лазерный луч, а пройдя через маску 14, он приобретает в поперечном сечении форму, близкую к прямоугольной. В исходном положении лазерные оптические модули неподвижны, их продольные оси параллельны. При этом сечения боковых лазерных лучей параллельны друг другу, а между ними перпендикулярно им в центральной зоне расположено сечение среднего лазерного луча (фиг. 9, 11). ИЛОМ 5 работает в инфракрасном (ИК) диапазоне спектра (длина волны λ = 0,85-0,89 мкм, мощность излучения Р=1-2 Вт). ИК луч в поперечном сечении имеет форму круга.
Световые и ИК лазерные лучи образуют в пространстве диаграмму излучения, изображенную на фиг.9. Здесь обозначены: 2, 4 - БЛОМ; 3 - СЛОМ; 5 - ИЛОМ; 6 - видеокамера (ВК); 60 - шланг, соединяющий корпус 61 заправочного конуса с топливной емкостью на самолете-заправщике; 62 - направляющие спицы, соединяющие корпус 61 с юбкой 63 заправочного конуса; 64 - световой лазерный луч СЛОМ 3; 65 -световой лазерный луч БЛОМ 2; 66 - световой лазерный луч БЛОМ 4; 67 - ИК лазерный луч ИЛОМ 5; 68 - поле зрения ВК 6;  - вектор скорости заправочного конуса;
- вектор скорости заправочного конуса;  - вектор скорости топливоприемника.
- вектор скорости топливоприемника.
Подлет к самолету-заправщику для заправки топливом в полете осуществляют с нижней полусферы с включенной видеокамерой (ВК) 6. Летчик заправляемого самолета наблюдает заправочный конус всегда и независимо от времени суток, т. к. ночью конус либо освещается с самолета-заправщика, либо подсвечивается лампочками, вмонтированными внутри конуса. Одновременно он видит на экране ВКУ 9 изображение юбки конуса (фиг.10а, на которой обозначено: 69 - координатная сетка в виде вертикальной и горизонтальной линий и концентрических окружностей с центром, совмещенным с осью топливоприемника; 70 - изображение юбки конуса, полученное с помощью ВК 6 и ВКК 8 на расстоянии, превышающем дистанцию контактирования). ИК лазерный оптический модуль 5 предназначен для подсветки заправочного конуса в тех случаях, когда отсутствует возможность контрастного наблюдения световых пятен на нем от других лазерных оптических модулей 2,3,4 из-за освещенности его солнцем в дневное время, или при отсутствии подсвета конуса либо необходимости соблюдения условий светомаскировки в ночное время. Исходя из этого выбрана мощность ИЛОМ 5, а также спектральная чувствительность видеокамеры (ВК) 6 согласована с длиной волны ИЛОМ 5. Для лучшего визуального восприятия глазом световых пятен от лазерных лучей детали конуса покрывают белой матовой краской либо юбку конуса обтягивают белой неблестящей тканью. Для обеспечения приема видеокамерой (ВК) 6 невидимого глазом пятна от ИК луча на поверхности юбки заправочного конуса нанесена кольцевая полоска из световозвращающего (котафотного) материала.
На дистанции 15-10 м до конуса уравнивают скорость заправляемого самолета со скоростью самолета-заправщика и осуществляют балансировку заправляемого самолета по всем каналам триммированием. Летчик заправляемого самолета включает источник света 1, ИЛОМ 5 (при необходимости) и, управляя заправляемым самолетом в горизонтальной и вертикальной плоскостях, перемещает центр координатной сетки к центру изображения 70 юбки заправочного конуса (фиг. 10б) и накладывает (совмещает) лазерные лучи на его контур так (фиг.10 в), что световое пятно 64 от среднего луча СЛОМ 3 помещается в центральной части конуса, а световые пятна 65, 66 от боковых лучей БЛОМ 2 и 4 соответственно - на поверхности юбки конуса в диаметрально противоположных точках. Пятно 67 от ИК луча ИЛОМ 5 видно кратковременно на экране ВКУ 9 при попадании ИК луча на световозвращающий материал на юбке заправочного конуса при наведении на него и постоянно - при освещении ИК лучом корпуса 61 конуса.
Диаметры концентрических окружностей координатной сетки на экране ВКУ 9 выполнены соответствующими определенным расстояниям до заправочного конуса. Например, средняя окружность 69 на фиг 10 соответствует расстоянию 15 метров до конуса. При совпадении внешнего диаметра изображения 70 конуса с диаметром этой окружности летчик заправляемого самолета начинает сближение с конусом.
Уверенное визуальное обнаружение и восприятие глазом световых пятен на деталях 61, 62 и 63 конуса обеспечивается тем, что яркости излучений СЛОМ 3 и соответствующего ему светового пятна 64 и одного из БЛОМ, например 4, и соответствующего ему светового пятна 66 модулируются в противофазе прямоугольными импульсами (фиг. 11) с частотой 3-5 Гц. Более высокая частота "мигания" световых пятен вызывает раздражение глаз, а более длинный период "мигания" (при меньшей частоте) становится соизмерим с периодом сближения заправляемого самолета с конусом, что может привести к ошибкам контактирования.
Токи накачки на лазер БЛОМ 2 и ИЛОМ 5 подаются из БП 21 непрерывно, а на лазеры СЛОМ 3 и БЛОМ 4 - в импульсном режиме и в противофазе с частотой 3-5 Гц через модуляторы яркости M1 17 и M2 18 соответственно (фиг. 3). Таким образом, световое пятно, образуемое одним боковым лазерным лучом 65, светится постоянно, а световые пятна, образуемые средним 64 и другим боковым лазерным лучом 66, светятся попеременно (на фиг. 10, 12 это показано сплошной заливкой и штриховкой соответствующих участков световых пятен). Длительность импульсов модуляции выбрана различной для лучшего различения среднего 64 и бокового 66 световых пятен. Длительность свечения среднего пятна 64 больше, т.к. средний лазерный луч падает на относительно мелкие детали заправочного конуса: корпус 61 и направляющие спицы 62 (фиг. 9, 12).
Импульсы тока накачки, например на лазер СЛОМ 3 (фиг.4), подаются с датчика тока (ДТ) 23 модулятора яркости M1 17. Со второго выхода ДТ 23 такие же импульсы подаются на первый вход схемы сравнения (СС) 24, на второй вход которой поступает ток эталонной величины от ГЭТ 27. Этот генератор задает предельные (максимальные) границы тока накачки для данного полупроводникового лазера. Если по каким-либо причинам лазер начнет излучать мощность, превышающую допустимую, СС 24 заблокирует работу модулятора. С выхода СС 24 импульсы тока подаются на генератор импульсов ГИ 25, от которых он запускается и воздействует на управляющий элемент (УЭ) 26, который управляет работой ДТ 23.
Работа ГИ 25 СЛОМ 3 и БЛОМ 4 синхронизируется блоком контроля (БК) 19. В этом блоке (фиг. 5) анализируются режимы работы элементов всего устройства и в случае несоответствия заданным параметрам формируются соответствующие сигналы, которые отображаются на пульте управления (ПУ) 20.
В частности, контроль работы лазеров 11 осуществляется следующим образом. Световой поток излучается лазером 11 в обе стороны (фиг.2). Встроенный ФД 12 преобразует световой поток в электрический ток, который подается в БК 19 (фиг.5) на усилитель тока, например, на У2 29. С его выхода ток поступает в блок принятия решения (БПР) 40 через его второй вход и в пороговое устройство У2 ЗЗ, выход которого соединен с шестым входом БПР 40. Если сигнал на пороговом устройстве ниже установленного для данного лазера порога, то в БПР 40 формируется и подается в модулятор яркости М1 17 управляющий сигнал на увеличение тока накачки этого лазера. В случае превышения мощности лазером (это возможно при понижении температуры лазера), сигнал с него превышает порог и управляющий сигнал БПР 40 понижает его ток накачки до требуемого уровня. Аналогичным способом анализируются параметры токов, вырабатываемых БП 21, видеокамерой (ВК) 6, модуляторами яркости М1 17, М2 18. В случае несоответствия параметров требуемым величинам БПР 40 вырабатывает сигналы, которые подаются на ПУ 20 и отображаются на соответствующих табло.
Устройство разведения БЛОМ (УР) 22 (фиг. 6) включается летчиком при помощи кнопки на пульте управления (ПУ) 20. При этом в зависимости от режима контактирования (ручной или автоматический) УР 22 работает либо по программе, либо по сигналам от вычислителя координат заправочного конуса (ВКК) 8. В первом случае схема управления (СУ) 41 устройства вырабатывает определенную последовательность импульсов напряжения, питающих шаговый мотор ЭП 42. Его вращение через редуктор (Р) 43 передается профилированному кулачку (ПК) 44. Профильные выступы 45 ПК 44 (фиг. 7), контактируя с корпусами БЛОМ 2 и БЛОМ 4, синхронно отклоняют последние от исходного (параллельного друг другу) положения на равные углы α. . Отклонение БЛОМ 2 и БЛОМ 4 начинают с момента достижения забавляемым самолетом дистанции контактирования, т.е. 10-15 метров до заправочного конуса и точного совмещения световых пятен от лазерных лучей с его контуром (фиг.10в, 12а). При этом скоростью сближения заправляемого самолета (топливоприемника) с конусом управляют следующим образом.
С уменьшением расстояния до конуса его угловые размеры увеличиваются со скоростью, пропорциональной скорости сближения. Для удержания световых пятен от боковых лазерных лучей на юбке конуса их разводят от исходного положения со скоростью, также пропорциональной скорости сближения. При этом конфигурация световых пятен на конусе не меняется (пятна неподвижны, фиг.12а). Если по каким-либо причинам скорость заправляемого самолета увеличивается или уменьшается, то световые пятна на конусе смещаются вовнутрь контура конуса (фиг. 12б) или за его пределы. Таким образом формируется визуальная информация о скоростных параметрах сближения заправляемого самолета с конусом. При программном разведении БЛОМ 2 и БЛОМ 4 его скорость пропорциональна требуемой (заданной) скорости сближения с конусом для данного типа заправляемого самолета и определяется зависимостью
dα/dt = f(dl/dt), (2)
где
α = arctg(Rk/l) - угол отклонения боковых лазерных оптических модулей (лучей) от исходного положения,
Rk - радиус фронтальной проекции конуса,
l - расстояние между заправляемым самолетом (топливоприемником) и конусом.
Из формул (1), (2) видно, что как радиус кривизны профильных выступов 45 ПК 44 (фиг. 7), отклоняющих БЛОМ 2 и БЛОМ 4 на угол α, , так и величина α обратно пропорциональны расстоянию 1 до конуса. Поскольку это расстояние (дистанция контактирования) априори известно, то можно заранее вычислить (запрограммировать) требуемую скорость сближения с конусом (производная расстояния по времени) данного типа заправляемого самолета. В заявленном изобретении это реализуется в устройстве разведения БЛОМ (УР 22) путем задания определенного числа импульсов напряжения, питающих шаговый мотор (ЭП 42). В формуле (1) радиус кривизны профильных выступов 45 ПК 44, а следовательно, и скорость разведения БЛОМ 2 и БЛОМ 4 для различных типов заправляемых самолетов будут разными т. к. величину Т выбирают с учетом динамики данного типа самолета.
Наблюдая положение световых пятен на конусе, летчик, манипулируя ручкой управления двигателем (двигателями), управляет скоростью самолета (уменьшая ее, или увеличивая) так, чтобы эти пятна все время оставались неподвижными и занимали исходное положение (фиг.12а). Так, если летчик видит, что боковые лучи "уходят" вглубь конуса (фиг.126), то это значит, что скорость сближения выше требуемой и ее следует уменьшить. Если боковые лучи "уходят" за пределы контура конуса, то это значит, что скорость сближения ниже требуемой и ее следует увеличить. При этом относительная скорость сближения заправляемого самолета с конусом не выходит за пределы диапазона допустимых изменений скорости ΔVc (фиг. 13). Таким образом, удерживая конфигурацию световых пятен на конусе в неизменном виде, летчик заправляемого самолета контролирует, во-первых, точность наведения топливоприемника на центр конуса и, во-вторых - величину превышения скорости заправляемого самолета над скоростью конуса (самолета-заправщика).
В программе разведения боковых лазерных лучей предусмотрено определенное (заданное) количество шагов исполнительного механизма (ПК 44) устройства разведения лазерных оптических лучей 22 на весь этап сближения заправляемого самолета с конусом. Поэтому, если по какой- либо причине (например ошибки пилотирования) в процессе сближения световые пятна сместятся в горизонтальной (фиг. 12в) или вертикальной плоскостях на значительную величину от исходного положения (что может привести к промаху топливоприемника), то сближение прекращают (скорость заправляемого самолета уравнивают со скоростью самолета- заправщика), выключают устройство разведения лучей, вновь совмещают световые пятна от лазерных лучей с контуром конуса (фиг. 12а), включают устройство разведения лучей и осуществляют сближение с конусом с новых начальных условий (нового расстояния). При работе ЭП 42 (шагового мотора) всегда известно количество шагов, которое он отработают (и которое отражается на ПУ 20), т.к. СУ 41 ведет учет импульсов, питающих шаговый мотор, и тем самым контролирует угловое положение кулачка 44. Поэтому с ПУ 20 можно вручную установить то или иное положение ЭП 42 и, следовательно, профилированного кулачка (ПК) 44, в зависимости от дальности до конуса.
В режиме автоматического контактирования сигналы на СУ 41 подаются из вычислителя координат заправочного конуса (ВКК) 8, который работает следующим образом (фиг. 8). На первый вход порогового устройства (ПУ) 49 поступают сигналы с выхода видеокамеры (ВК) 6 в цифровой форме в формате: [N строки, N пикселя, A - амплитуда сигнала; [Р - признак ИК подсветки, один на кадр]]. При этом Р= 1, если условия визуального наблюдения плохие и ИЛОМ 5 включен (изображение конуса светлое на темном фоне) и Р=0, если условия визуального наблюдения нормальные и ИЛОМ 5 выключен (изображение конуса темное на светлом фоне). На выход ПУ 49 проходят только те сигналы, которые формируют изображение юбки заправочного конуса. Уровень порога определяется блоком выбора порога (БВП) 47 по управляющему сигналу коррелятора (К) 51. БВП 47 выполнен, например, в виде логической схемы с постоянным запоминающим устройством, в котором записаны значения пороговых величин, в соответствии с которыми порог в ПУ 49 изменяется таким образом, чтобы на входе К 51 изображение юбки заправочного конуса в наибольшей степени соответствовало форме кольца, эталон которого хранится в памяти коррелятора (К) 51. Сигналы с выхода ПУ 49 поступают на первый вход устройства интерполяции (УИ) 50, на второй вход которого с первого выхода постоянного запоминающего устройства (ПЗУ) 48 поступают сигналы, заполняющие пропущенные или потерянные в ПУ 49 сигналы, формирующие изображение юбки конуса. Закон интерполяции хранится в памяти ПЗУ 48. С выхода УИ 50 сигналы поступают в К 51, в котором в результате корреляционной обработки формируется окончательное изображение юбки заправочного конуса в виде кольца, "очищенное" от шумовых засветок и искажений. Сигналы с выхода К 51 поступают в первый арифметический блок расчета координат (АБР1) 52. В нем определяются геометрические размеры в пикселях полученного изображения (диаметр кольца - d) и величины отклонения (y, z) его центра от центра системы координат, которым является точка пересечения вертикальной картинной плоскости с нормальной к ней осью топливоприемника. С выхода АБР1 52 эти данные поступают во второй арифметический блок расчета координат (АБР2) 53, в котором табличным методом определяются линейные отклонения кольца (юбки заправочного конуса) и расстояние (l) до него заправляемого самолета (топливоприемника) в метрах. Табличные данные подаются на второй вход АБР2 53 со второго выхода ПЗУ 48. Сигналы, пропорциональные координатам заправочного конуса подаются в первый фильтр (Ф1) 54, где подвергаются очистке от случайных выбросов и далее поступают на третий вход блока сравнения (БС) 57. Ф1 54 выполнен, например, в виде нерекурсивного фильтра, состоящего из параллельно включенных фильтров (по числу обрабатываемых параметров). Постоянные времени фильтров зависят от скорости изменения параметров и выбираются по известным правилам.
Сигналы, пропорциональные расстоянию l до заправочного конуса, с выхода Ф1 54 подаются на дифференциатор (Д) 55, на выходе которого выделяются сигналы, пропорциональные требуемой скорости сближения (dl/dt) заправляемого самолета (топливоприемника) с заправочным конусом. Эти сигналы сглаживаются во втором фильтре (Ф2 56 и с его выхода подаются в БС 57, а также на второй вход схемы управления (СУ) 41 устройства разведения БЛОМ 2 и 4 (УР) 22 в блоке управления (БУ) 7. В БС 57 сигналы, пропорциональные координатам заправочного конуса (l, y, z - с выхода Ф1 54) и скорости сближения с ним (dl/dt- с выхода Ф2 56), сравниваются с соответствующими эталонными сигналами, поступающими на второй вход БС 57 с третьего выхода ПЗУ 48. Эталонные сигналы хранятся в памяти модели контактирования для различных начальных условий и данного типа заправляемого самолета. На выходе БС 57 формируются сигналы рассогласования (Δl,Δy,Δz,Δdl/dt), , которые поступают в блок выработки управляющих сигналов (БУС) 58, с выхода которого сигналы управления поступают в буферный блок (ББ) 59. Здесь осуществляется выравнивание темпов выдачи и форматов команд управления, которые с выходов ББ 59 подаются в САУ, на ВКУ 9 и на ИЛС (при его наличии). Таким образом, пространственным положением заправляемого самолета и скоростью его сближения с заправочным конусом управляет САУ. При этом на СУ 41 УР 22 подается напряжение, пропорциональное величине непрерывно вычисляемой требуемой скорости сближения, которая в каждый момент времени соответствует измеренному расстоянию до конуса. Летчик контролирует визуально и уточняет по экрану ВКУ 9 положение световых пятен на юбке заправочного конуса и в случае нарушения их конфигурации может взять управление самолетом на себя, выключив автоматический режим контактирования.
Вышеизложенные сведения подтверждают, что средство, воплощающее заявленное изобретение при его осуществлении, предназначено для использования в промышленности, а именно в авиационной технике для заправки самолетов топливом в полете. Для изобретения в том виде, как оно охарактеризовано в формуле изобретения, подтверждена возможность его осуществления с помощью отесанных в заявке или известных до даты приоритета средств и методов. При этом средство, воплощающее заявленное изобретение, способно обеспечить достижение указанного в заявке технического результата. Следовательно, изобретение соответствует условию патентоспособности "промышленная применимость".
Преимущества заявленного устройства по сравнению с известными заключаются в том, что после отработки на тренажере и 2-3 тренировочных полетов достигается 100%-ная вероятность контактирования заправляемого самолета с заправочным конусом независимо от квалификации летного состава.
Кроме указанного назначения заявленное изобретение может быть использовано в случаях, когда требуется осуществлять контроль определенного расстояния между подвижными объектами. Например, при полете самолетов в строю источник света направляют с одного самолета на фюзеляж другого и по изменению размеров световых пятен судят об изменении расстояния между самолетами. Аналогичным образом можно контролировать изменение расстояния между речными (морскими) судами при проходе в узких проливах или каналах.
При приземлении самолета, особенно в ночных условиях, источник света направляют на ВПП и по изменению расположения световых пятен от лучей лазеров можно судить о пространственном положении самолета относительно плоскости ВПП.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ВИЗУАЛЬНОГО КОНТРОЛЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ И СКОРОСТИ ЗАПРАВЛЯЕМОГО САМОЛЕТА ПРИ ДОЗАПРАВКЕ ТОПЛИВОМ В ПОЛЕТЕ | 1996 |
|
RU2099253C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ПОЛОЖЕНИЕМ И СКОРОСТЬЮ ЗАПРАВЛЯЕМОГО САМОЛЕТА ПРИ ДОЗАПРАВКЕ ТОПЛИВОМ В ПОЛЕТЕ | 1996 |
|
RU2090458C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ОТРАЖАТЕЛЬНЫХ СВОЙСТВ ОБЪЕКТОВ СЛОЖНОЙ ФОРМЫ В СВЧ ДИАПАЗОНЕ РАДИОВОЛН | 1997 |
|
RU2111506C1 |
| Наземный подвижный стенд и способ его применения для испытаний системы автоматического управления дозаправкой в воздухе | 2023 |
|
RU2819151C1 |
| СИСТЕМА ЗАПРАВКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ТОПЛИВОМ В ПОЛЕТЕ | 2021 |
|
RU2777576C1 |
| САМОЛЕТ-ЗАПРАВЩИК | 1994 |
|
RU2100257C1 |
| САМОЛЕТ-ЗАПРАВЩИК | 1994 |
|
RU2142897C1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ МАТЕРИАЛОВ | 1996 |
|
RU2109272C1 |
| СПОСОБ СТЫКОВКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ, СТЫКОВОЧНАЯ СИСТЕМА И СЦЕПНОЕ УСТРОЙСТВО | 2022 |
|
RU2791625C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В ПРОДОЛЬНОМ КАНАЛЕ ПРИ ДОЗАПРАВКЕ В ВОЗДУХЕ | 2022 |
|
RU2833735C2 |
Устройство позволяет летчику заправляемого самолета контролировать взаимное расположение заправочного конуса и топливоприемника и скорость их сближения при заправке. Устройство содержит установленные на заправляемом самолете источник света 1, выполненный в виде среднего 3 и двух боковых 2, 4 лазерных оптических модулей, инфракрасный лазерный оптический модуль 5, видеокамеру 6 с подключенным к ее выходу видеоконтрольным устройством 9, блок управления 7 и вычислитель координат 8 заправочного конуса. Оптические оси лазерных оптических модулей 2, 3, 4, 5 и видеокамеры 6 съюстированы с осью приемника. Источник света 1, инфракрасный лазерный оптический модуль 5 и видеокамера 6 подключены к блоку управления 7, соединенного с вычислителем координат 8 заправочного конуса, который, в свою очередь, соединен с видеокамерой 6, с блоком управления 7, с автоматической системой управления самолетом и с видеоконтрольным устройством 9. Боковые лазерные оптические модули 2, 4 источника света 1 установлены с возможностью углового перемещения относительно среднего модуля 3. 3 з.п.ф-лы, 3 ил.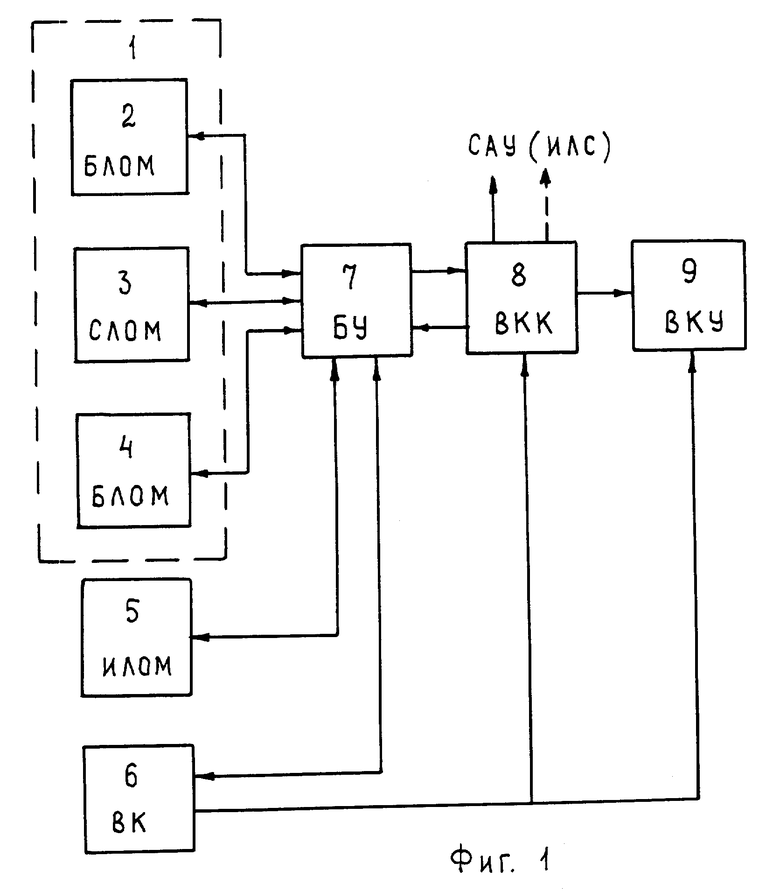
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Советская военная энциклопедия | |||
| - М.: Воениздат, 1977, т.3, с.220 и 221 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Огнетушитель | 0 |
|
SU91A1 |
| Нефтяной конвертер | 1922 |
|
SU64A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| US, патент, 5326052, кл | |||
| Нефтяной конвертер | 1922 |
|
SU64A1 |
