Изобретение относится к компьютерной технике, робототехнике и может использоваться в интерактивных компьютерных играх для дистанционного ввода трехмерной информации в компьютер, а также для ввода информации в робот, манипулятор или иной управляемый объект.
Известен способ ввода информации в компьютер, который предусматривает взаимно-однозначное соответствие вводимой информации как с двумерными координатами мыши (ее положением на опорной плоскости), так и с положением особой кнопки, перемещаемой вертикально [1]
Недостатком известного технического решения является необходимость в опорной поверхности, ограничивающей возможность свободного перемещения оператора при вводе информации в управляемый объект. Кроме того, перемещение кнопки в вертикальном направлении ограничено высотой "мыши", что, в свою очередь, ограничивает точность ввода информации, определяемой вертикальной координатой. Известное техническое решение не предусматривает возможность ввода в объект управления информации, связанной с поворотом мыши вокруг своих осей.
Наиболее близкими по технической сущности и достигаемому эффекту являются выбранные за прототип способ ввода информации в объект управления и устройство для его реализации [2]
При реализации известного способа:
осуществляют оптическое зондирование области расположения бесконтактной оптической мыши с закрепленными на ней оптическими излучателями;
получают действительное оптическое изображение зондируемого пространства, с проекциями на нем оптических излучателей;
изменяют пространственные координаты бесконтактной оптической мыши с закрепленными на ней оптическими излучателями;
по проекциям оптических излучателей на действительном оптическом изображении определяют текущие значения пространственных координат оптических излучателей и геометрического центра излучающей области бесконтактной оптической мыши;
вводят текущие значения пространственных координат геометрического центра излучающей области бесконтактной оптической мыши в качестве информации в объект управления.
Известное устройство ввода информации в объект управления содержит бесконтактную (т. е. перемещаемую в пространстве без контакта с опорной поверхностью) и беспроводную мышь с размещенным на ней рефлектором и стационарный приемопередающий блок, который включает источник зондирующего излучения, разнесенные в пространстве и имеющие волновую связь с рефлектором три канала формирования одномерных действительных изображений зондируемого пространства, микропроцессор, интерфейс связи микропроцессора с компьютером.
В известном устройстве в качестве вводимой информации используется только три параметра пространственные координаты контррефлектора, что ограничивает возможности применения бесконтактной мыши при вводе многомерной (характеризуемой числом параметров больше трех) информации, работе с "меню", "окнами", прецизионном управлении роботами и манипуляторами, игровым оружием в интерактивных компьютерных играх. В частности, данное техническое решение не позволяет ввести в объект управления информацию, связанную с поворотом мыши вокруг своих осей.
Целью изобретения является расширение функциональных возможностей бесконтактной оптической мыши путем увеличения числа каналов ввода информации (размерности мыши). При этом в качестве дополнительных каналов ввода информации предлагается использовать значения углов поворота бесконтактной оптической мыши вокруг трех координатных осей.
При осуществлении способа ввода информации в объект управления:
осуществляют оптическое зондирование области расположения бесконтактной оптической мыши с закрепленными на ней оптическими излучателями;
получают действительное оптическое изображение зондируемого пространства с проекциями на нем оптических излучателей;
изменяют пространственные координаты бесконтактной оптической мыши с закрепленными на ней оптическими излучателями;
по проекциям оптических излучателей на действительном оптическом изображении определяют текущие значения пространственных координат оптических излучателей и геометрического центра излучающей области бесконтактной оптической мыши;
вводят текущие значения пространственных координат геометрического центра излучающей области бесконтактной оптической мыши в качестве информации в объект управления.
В качестве объекта управления могут быть использованы компьютер, робот-манипулятор и т.п. устройства.
В отличие от прототипа при осуществлении способа:
действительное оптическое изображение зондируемого пространства получают двумерным;
оптические излучатели закрепляют на бесконтактной оптической мыши друг относительно друга таким образом, что они образуют пространственную геометрическую фигуру;
изменяют значения углов поворота бесконтактной оптической мыши относительно трех взаимно перпендикулярных пространственных осей, исходящих из геометрического центра ее излучающей области, и коллинеарных осям ортогональной системы координат;
по изменению параметров (конфигурации) взаимного расположения проекций оптических излучателей на плоском двумерном действительном изображении зондируемого пространства определяют текущие значения углов поворота бесконтактной оптической мыши;
вводят текущие значения углов поворота бесконтактной оптической мыши в качестве информации в объект управления.
Устройство ввода информации в объект управления включает бесконтактную оптическую мышь с закрепленными на ней оптическими излучателями и стационарный приемопередающий блок.
Стационарный приемопередающий блок содержит стационарный источник зондирующего излучения, оптическую сканирующую систему, микропроцессор и интерфейс связи микропроцессора с объектом управления.
Бесконтактная оптическая мышь имеет оптическую связь с оптически изолированными друг от друга входом сканирующей системы и стационарным источником зондирующего излучения, выход сканирующей системы электрически соединен с входом микропроцессора, выход микропроцессора с входом интерфейса, а выход интерфейса с входом объекта управления.
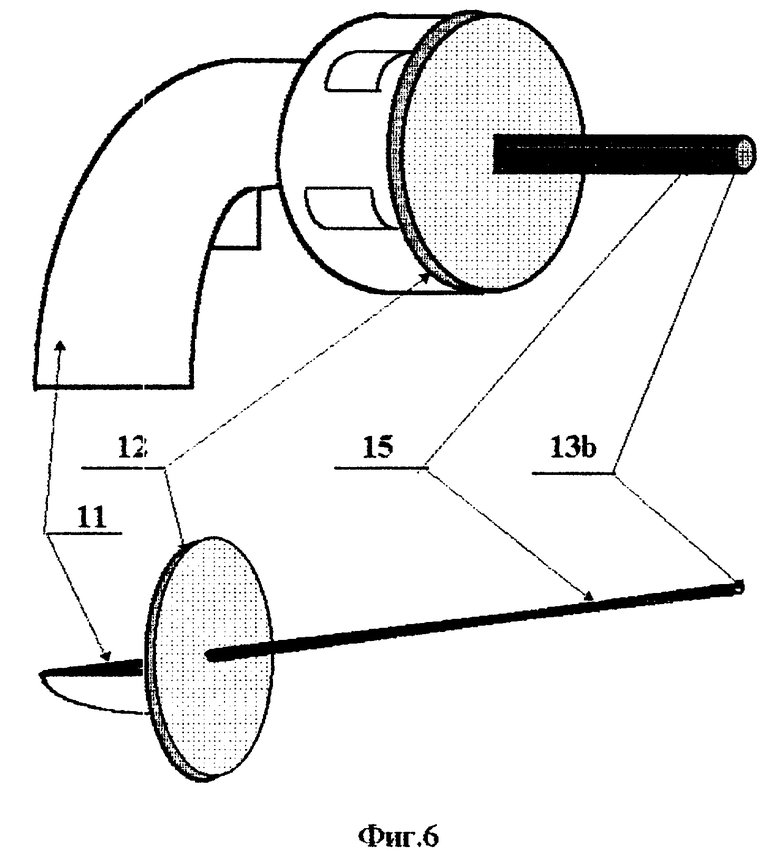
В отличии от прототипа оптические излучатели закреплены в виде круга на плоской панели, установленной на передней поверхности бесконтактной оптической мыши и на вершине поглощающего оптическое излучение стержня, расположенного в центре этого круга перпендикулярно его плоскости.
Оптическая сканирующая система может содержать объектив, плоскую двумерную матрицу оптических приемников и блок опроса.
Плоская двумерная матрица оптических приемников может быть выполнена в виде матрицы полупроводниковых приемников излучения на основе приборов с зарядовой связью (ПЗС).
Оптические излучатели могут быть закреплены в виде круга с нарушенной аксиальной симметрией. Для нарушения аксиальной симметрии можно использовать как отсутствие какого-либо оптического излучателя на месте его возможной установки, так и установку на это место поглощающего оптическое излучение элемента.
Оптические излучатели могут быть вторичными (т.е. испускающими отраженное излучение) и выполненными в виде контррефлекторов, а стационарный источник зондирующего излучения должен быть в этом случае расположен в непосредственной близости от входа оптической сканирующей системы.
Оптические излучатели могут быть первичными инфракрасными, а бесконтактная оптическая мышь должна содержать последовательно электрически соединенные друг с другом приемник зондирующего излучения, генератор импульсов, усилитель мощности, при этом выход усилителя мощности электрически соединен с входами инфракрасных оптических излучателей.
Оптические излучатели, закрепленные на вершине поглощающего стержня могут быть первичными инфракрасными, а закрепленные на плоской панели в виде круга контррефлекторами, при этом бесконтактная оптическая мышь дополнительно должна содержать последовательно электрически соединенные кнопочный переключатель и модулятор управляющего сигнала, выход которого электрически соединен с вторым входом усилителя мощности, а стационарный приемопередающий блок должен содержать последовательно электрически соединенные приемник управляющего сигнала и демодулятор управляющего сигнала, при этом выход демодулятора управляющего сигнала должен быть электрически соединен с вторым входом микропроцессора.
В данной заявке под бесконтактной оптической мышью понимается оптическая мышь, при пространственном перемещении которой ввод данных, например, в компьютер осуществляется без необходимости контакта с какой-либо опорной поверхностью.
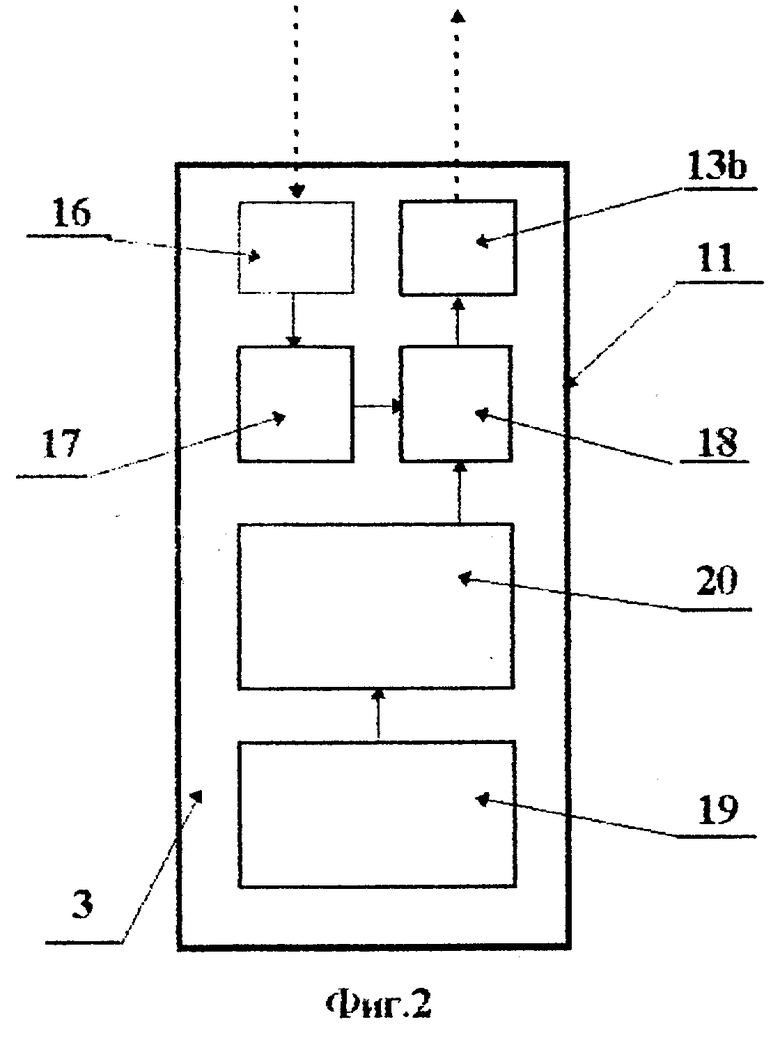
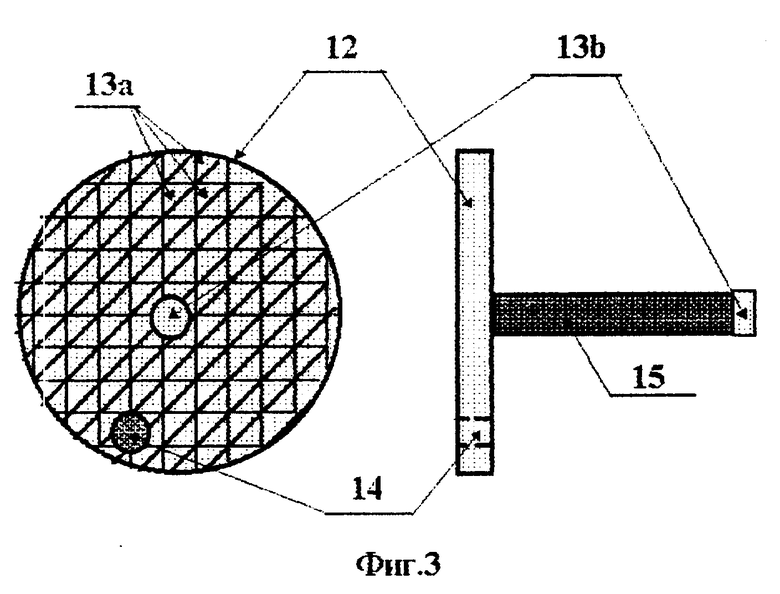
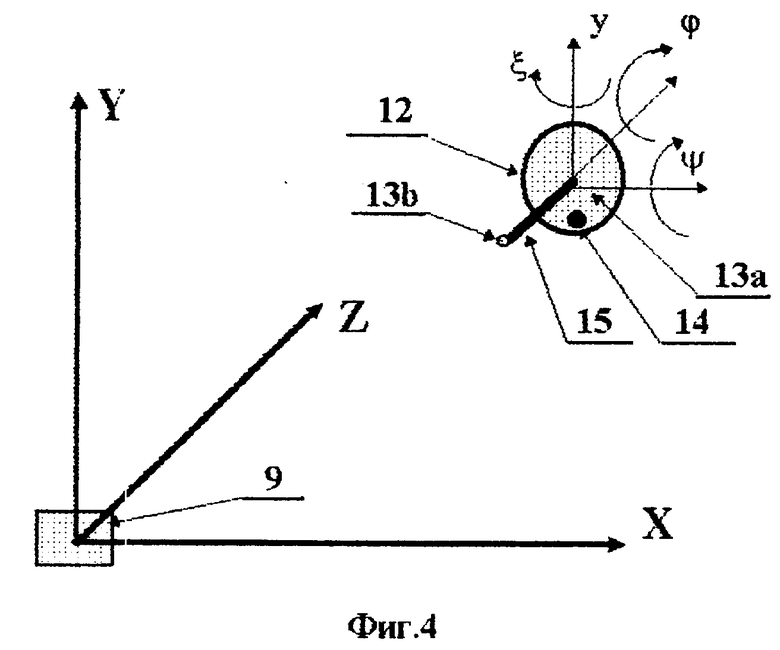
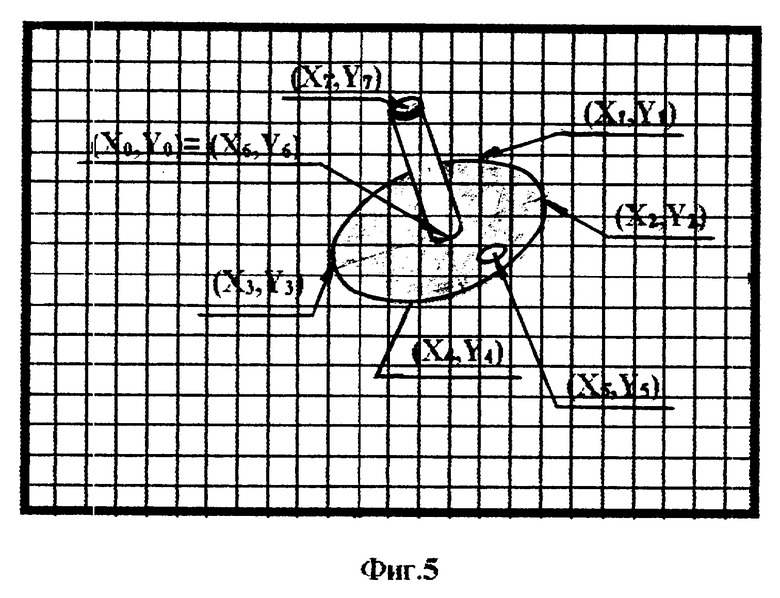
На фиг.1 изображена блок-схема устройства, реализующего способ ввода информации в объект управления (компьютер); на фиг. 2 блок-схема бесконтактной оптической мыши с инфракрасными оптическими излучателями; на фиг. 3 пример расположения оптических излучателей на круглой плоской панели и поглощающем стержне; на фиг.4 система координат, используемая при определении положения и ориентации в пространстве бесконтактной оптической мыши; на фиг. 5 получение по пространственным координатам оптических излучателей проекции пространственной геометрической фигуры на плоскость входного окна оптической сканирующей системы; на фиг. 6 выполнение бесконтактной оптической мыши в виде пистолета а) и рапиры б).
Способ ввода информации в объект управления может быть реализован с помощью устройства, блок-схема которого представлена на фиг. 1.
Устройство ввода информации в объект управления, например в компьютер 1, состоит из стационарного приемопередающего блока 2 и бесконтактной оптической мыши 3.
Стационарный приемопередающий блок 2 содержит стационарный источник зондирующего излучения 4, оптическую сканирующую систему 5, микропроцессор 6 и интерфейс 7 связи с компьютером 1.
Стационарный источник зондирующего излучения 4 может быть выполнен на основе светоизлучающего диода, например светодиода АЛ107Г, излучающего в инфракрасной области спектра.
Оптическая сканирующая система 5 содержит первый объектив 8, плоскую двумерную матрицу оптических приемников 9, выполненную в виде матрицы полупроводниковых приемников излучения на основе приборов с зарядовой связью (ПЗС), например, марки А-1157 с числом элементов по горизонтали и вертикали соответственно 500 и 582 и размерами элемента 17х11 мкм, а также блок опроса 10.
Стационарный источник зондирующего излучения 4 расположен в непосредственной близости от первого объектива 8.
Бесконтактная оптическая мышь 3 (фиг. 2, 3, 6), содержит корпус 11, на круглой плоской панели 12 которого закреплены оптические излучатели 13. Корпус 11 изготовлен таким образом, чтобы обеспечить удобство размещения бесконтактной оптической мыши 3 в руке оператора (например в виде пистолета). На круглой плоской панели 12 закреплен также поглощающий элемент 14. Оптические излучатели 13 и поглощающий элемент 14 расположены на бесконтактной оптической мыши 3 таким образом, что образуют круг с нарушенной аксиальной симметрией.
В центре этого круга перпендикулярно его плоскости расположен поглощающий оптическое излучение стержень 15, на вершине которого также закреплены оптические излучатели 13.
Оптические излучатели 13 (фиг. 3) могут быть вторичными и выполненными в виде контррефлекторов 13a (пассивная мышь) или первичными и выполненными в виде инфракрасных оптических излучателей 13b (активная мышь).
На фиг. 3 представлен вариант, когда оптические излучатели 13, закрепленные на вершине поглощающего стержня 15, являются первичными инфракрасными (13b), а закрепленные на круглой плоской панели 12 - контррефлекторами (13a).
На фиг. 2 представлена блок-схема активной бесконтактной оптической мыши 3, которая содержит инфракрасные оптические излучатели 13b, выполненные в виде матрицы светоизлучающих диодов, например, типа АЛ107Г, излучающих в инфракрасном диапазоне длин волн, а также последовательно электрически соединенные друг с другом приемник (типа ФД320) зондирующего излучения 16, генератор импульсов 17 и усилитель мощности 18, при этом выход усилителя мощности 18 электрически соединен с входами инфракрасных оптических излучателей 13b. Кроме того, бесконтактная оптическая мышь 3 содержит последовательно электрически соединенные кнопочный переключатель 19 и модулятор управляющего сигнала 20, выход которого электрически соединен с вторым входом усилителя мощности 18. Электропитание электрической схемы бесконтактной оптической мыши 3 осуществляется от стандартного миниатюрного аккумулятора или батарейки (не показано).
Стационарный приемопередающий блок 2 содержит второй объектив 21 и последовательно электрически соединенные приемник управляющего сигнала 22 и демодулятор управляющего сигнала 23, при этом выход демодулятора управляющего сигнала 23 электрически соединен с вторым входом микропроцессора 6.
Оптические излучатели 13 и вход оптической сканирующей системы 5 (фиг. 1) имеют между собой оптическую связь, выход оптической сканирующей системы 5 электрически соединен с входом микропроцессора 6, выход микропроцессора 6 электрически соединен с входом интерфейса 7, а выход интерфейса 7 электрически соединен с входом компьютера 1.
Стационарный приемопередающий блок 2 подключен к внешнему источнику питания (не показан).
При реализации способа устройство ввода информации в объект управления работает следующим образом.
Если бесконтактная оптическая мышь 3 выполнена пассивной, то в момент определения пространственных координат стационарный источник зондирующего излучения 4 испускает инфракрасное излучение в направлении бесконтактной мыши 3 и это излучение отражается от контррефлекторов 13a в сторону оптической сканирующей системы 5. Сформированное первым объективом 8 изображение контррефлекторов 13a проецируется на выполненный в виде чувствительной к инфракрасному излучению плоской двумерной матрице оптических приемников 9.
Если же бесконтактная мышь 3 выполнена активной, то излучение стационарного источника зондирующего излучения 4 принимается приемником зондирующего излучения 16 (фиг. 2). Сигнал от приемника зондирующего излучения 16, пройдя через генератор импульсов 17 и усилитель мощности 18, включает инфракрасные оптические излучатели 13b. Излучение от инфракрасных оптических излучателей 13b, сфокусированное первым объективом 8 оптической сканирующей системы 5, проецируется на плоскую двумерную матрицу оптических приемников 9 и далее работа устройства осуществляется аналогично работе устройства с пассивной бесконтактной оптической мышью 3.
Возможно включение инфракрасных оптических излучателей 13b и с помощью кнопочного переключателя 19, который исполняет роль левой клавиши обычной компьютерной "мыши" или клавиши "Enter" ("Ввод") на клавиатуре компьютера.
На плоской двумерной матрице оптических приемников 9 формируются изображения оптических излучателей 13 (фиг. 5). Сигналы с плоской двумерной матрицы 9 подаются на микропроцессор 6, выполненный, например, на основе микросхемы "Motorolla" DSP56002, который по координатам оптических излучателей 13 определяет пространственное положение бесконтактной оптической мыши 3 следующим образом:
по координатам первого (X1, Y1) и последнего (X4, Y4) из освещенных элементов плоской двумерной матрицы оптических приемников 9 (фиг. 5), сигнал от которых выше некоторой заданной пороговой величины, (т.е. по номерам их строк и столбцов) рассчитывает X- и Y-координаты геометрического центра O(X0, Y0) изображения круглой плоской панели 12 на основе формул
X0=(X1+X4)/2 (1а)
Y0=(Y1+Y4)/2; (1b)
определяет в каждой i-й строке плоской двумерной матрицы 9 координаты (Xi, Yi) первого освещенного элемента и рассчитывает квадрат расстояния R
R
определяет максимальное R
a = [R
где а длина большой полуоси эллипса, образованного проекцией круглой плоской панели 12 на плоскую двумерную матрицу 9;
используя известные значения фокусного расстояния F объектива 8 и радиуса R круглой плоской панели 12 по формуле
L=(F•R)/a, (3)
рассчитывает Z-координату, т.е. расстояние L от оптической сканирующей системы 5 до бесконтактной оптической мыши 3.
Три угла поворота ψ, ζ и ϕ вокруг соответственно осей X, Y и Z (фиг. 4) бесконтактной оптической мыши 3 находятся по следующему алгоритму:
определяются координаты (X5, Y5) (фиг. 5) поглощающего элемента 14, нарушающего аксиальную симметрию расположения оптических излучателей 13 на круглой плоской панели 12 и вычисляется угол поворота бесконтактной оптической мыши 3 вокруг оси Z по формуле
v = arctg[(Y5- Yo)/(X5- Xo)], (4)
определяются координаты (X6, Y6) и (X7), Y7) концов проекции поглощающего стержня 15 (фиг. 5) и находится тот из концов, который примыкает к круглой плоской панели 12, исходя из критерия ошибки определения координат X и Y;
ошибки определения координат X и Y;
рассчитывается угол поворота бесконтактной оптической мыши 3 вокруг координатной оси X по формуле
где H высота поглощающего стержня 14;
а h= Н•F/L высота его проекции в том случае, когда поглощающий стержень 15 расположен параллельно фокальной плоскости оптической сканирующей системы 5;
рассчитывается угол поворота бесконтактной мыши (фиг. 4) вокруг координатной оси Y по формуле
В ряде случаев, когда нет необходимости учитывать угол поворота бесконтактной оптической мыши 3 вокруг оси Z (фиг. 4), ее конструкция может быть упрощена за счет исключения поглощающего элемента 14, нарушающего аксиальную симметрию расположения оптических излучателей 13 и за счет соответствующего упрощения алгоритма расчета. Это может оказаться полезным при использовании бесконтактной оптической мыши 3 в качестве дистанционной указки в некоторых типах манипуляторов, а также в стереоскопических или объемных компьютерных играх, где подобная бесконтактная 5-мерная мышь могла бы имитировать пистолет, рапиру или иное оружие.
Примеры исполнения бесконтактной оптической мыши 3 в виде пистолета и рапиры приведены на фиг. 6.
Таким образом, из вышесказанного следует, что изобретение позволит ввести в объект управления информацию о пространственном положении используемой в качестве органа управления бесконтактной оптической мыши по всем шести степеням свободы.
Следует иметь в виду, что форма выполнения изобретения, описанная выше и показанная на чертежах, представляет собой только возможный предпочтительный вариант его осуществления. Могут быть использованы различные вариации выполнения изобретения в отношении исполнения отдельных его узлов и последовательности проведения операций.
Изобретение относится к компьютерной технике, робототехнике и может использоваться в интерактивных компьютерных играх для дистанционного ввода трехмерной информации в объект управления. При осуществлении способа ввода информации в объект управления проводят оптическое зондирование области расположения бесконтактной оптической мыши с закрепленными на ней оптическими излучателями; действительное оптическое изображение зондируемого пространства получают двумерным; по изменению параметров взаимного расположения проекций оптических излучателей на плоском двумерном действительном изображении зондируемого пространства определяют текущее значение углов поворота бесконтактной оптической мыши; вводят текущие значения углов поворота бесконтактной оптической мыши в качестве информации в объект управления. Устройство ввода информации в объект управления включает бесконтактную оптическую мышь с закрепленными на ней оптическими излучателями и стационарный приемопередающий блок, содержащий стационарный источник зондирующего излучения, оптическую сканирующую систему, микропроцессор и интерфейс связи микропроцессора с объектом управления. 2 с. и 6 з.п. ф-лы, 6 ил.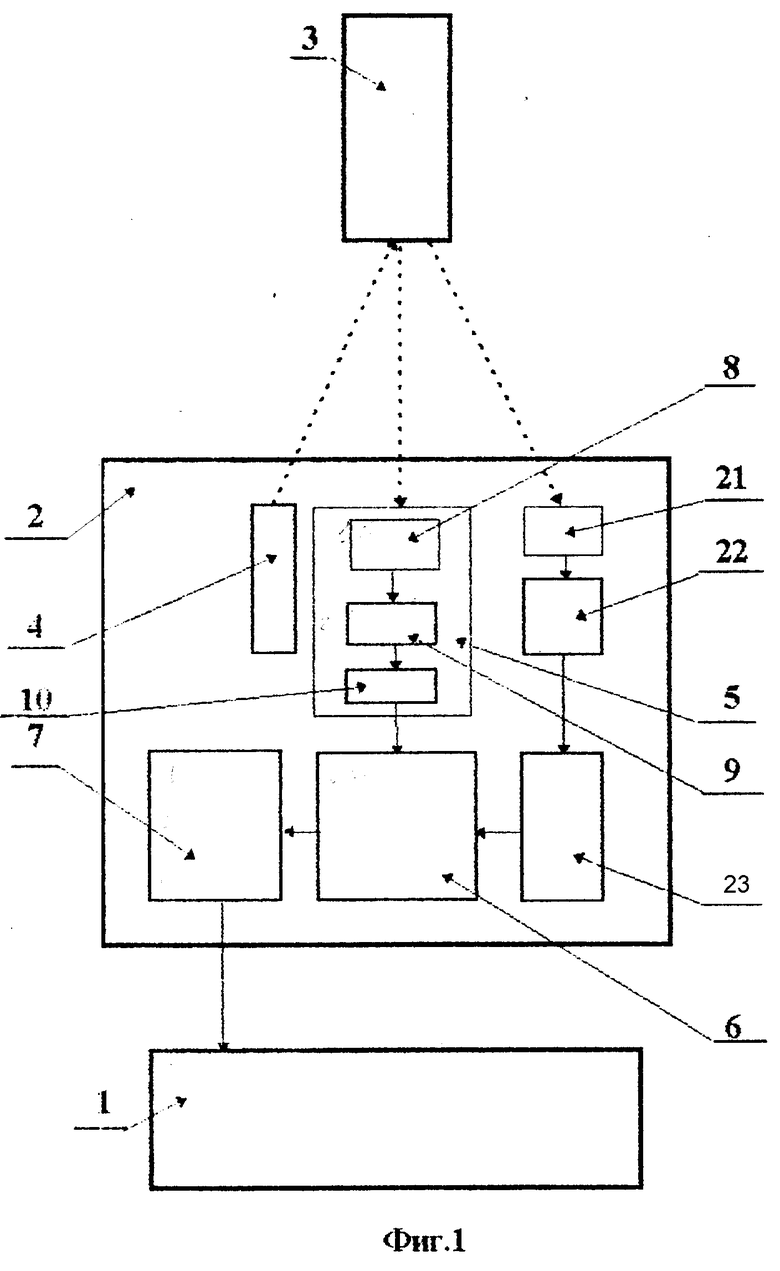
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ЕР, патент, 0403782, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ЕР, патент, 0526015, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
