Изобретение относится к области радиотехники и может быть использовано для угловых измерений в радиолокационных системах.
Известен способ пеленгации источников сигналов, именуемый методом максимальной энтропии [1,2] Способ предполагает аппроксимацию сигналов, принимаемых решеткой датчиков, процессом авторегрессии. Оценками пеленгов являются нули частотной характеристики обеляющего фильтра для указанного процесса авторегрессии.
Метод максимальной энтропии характеризуется высокой разрешающей способностью, однако недостатками его являются наличие смещения оценок, а также их неоднозначность (эффективность расщепления спектральных линий) [1, с. 193]
Известен также способ пеленгации источников сигналов, именуемый в литературе как метод MUSIC или метод Шмидта [3,4] Оценками пеленгов являются направления, для которых соответствующие векторы амплитудно-фазового распределения ортогональны шумовому подпространству. Проектор на шумовое подпространство строится на базе собственных векторов ковариационной матрицы принимаемых сигналов и шумов, соответствующих минимальным (шумовым) собственным значениям. Способ характеризуется высокой разрешающей способностью. Недостатками способа являются возможное появление ложных пиков в оценке спектра [5,с.445] а также большие объемы вычислений и требуемой памяти [6]
Наиболее близким по совокупности признаков к предлагаемому изобретению является способ оценивания местоположения источников сигналов и параметров сигналов с использованием массива из пар датчиков ESPRIT [4,6] который и выбран в качестве прототипа.
Способ заключается в следующем:
1. Принимают сигналы пеленгуемых источников излучения двумя антенными решетками, содержащими по m датчиков каждая, причем каждому датчику в первой антенной решетке соответствует датчик во второй антенной решетке с идентичными характеристиками и ориентацией, смещенный относительно первого на расстояние Δ. Направление и величина смещения D одинаковы для всех пар датчиков.
2. По сигналам X, принятым первой антенной решеткой, и сигналами Y, принятым второй антенной решеткой, оценивают ковариационную матрицу Rxx и взаимную ковариационную матрицу Rxy.
3. Определяют наименьшее собственное значение ковариационной матрицы Rxx и затем вычитают его из каждого элемента главной диагонали Rxx. Полученную в результате вычитания матрицу обозначают Cxx.
4. Определяют обобщенные собственные значения gi (i=1,m) матричной пары Cxx, Rxy}
5. Вычисляют обобщенные значения γk (k=1,d), равные по модулю единице, количество которых соответствует количеству источников сигналов d, а аргумент соответствует оценкам пеленгов источников относительно нормали к направлению смещения Δ второй антенной решетки относительно первой антенной решетки. Пеленг Qk на k-й источник сигнала определяют как арксинус от аргумента обобщенного собственного значения γk, умноженного на скорость распространения радиоволн с (скорость распространения используемого типа волн: акустических, радиоволн и др.) и деленного на частоту принимаемых сигналов ωo и величину смещения Δ:
Сигналы, принятые i-ми датчиками первой антенной решетки X и второй антенной решетки Y, определяются соотношениями
где Sk(t) сигнал k-го волнового фронта, принятый первым датчиком антенной решетки X; Θk направление прихода сигналов k-го источника относительно нормали к направлению смещения Δ; ai(Θk) отклик k-го датчика каждой антенной решетки, определяемый относительно отклика первого датчика той же антенной решетки при воздействии одиночного волнового фронта сигнала под углом Θk; Δ смещение между антенными решетками; uxi(t), uyi(t) - аддитивные шумы i-го датчика соответственно антенных решеток X и Y.
В более удобной и компактной матричной записи эти соотношения принимают вид:
X(t)=AS(t)+ux(t),
Y(t)=AФS(t)+uy(t),
где
Xt=[xl(t),xm(t)]
ux(t)=[uxl(t),uxm(t)]
Yt=[yl(t),ym(t)]
uy(t)=[uyl(t),uym(t)]
t знак транспонирования.
Вектор S(t) есть d-элементный вектор волновых фронтов сигналов, принимаемых первым датчиком антенной решетки X. Через Ф обозначена диагональная (dxd) матрица фазовых задержек между одноименными датчиками в антенных решетках X и Y для воздействующих d волновых фронтов:
Ф = diag[ejωoΔsinΘ1/c,...,ejωoΔsinΘd/c], (5)
а через
A (mхd) матрица направлений, столбцы которой являются векторами направлений сигналов для d воздействующих волновых фронтов:
at(Θk) = [a1(Θk),...,am(Θk)]. (6)
Ковариационная матрица сигналов, принимаемых антенной решеткой X определяется выражением [4]
Rxx= E[X(t)•X*(t)] = ASA*+ σ2I, (7)
где * знак комплексного сопротивления и транспонирования, E - знак математического оживления. Через S обозначена ковариационная (dxd) матрица сигналов источников S(t), т. е.
S=E[S(t)•S*(t)]
а через σ2 дисперсия аддитивного некоррелированного белого шума, присутствующего во всех датчиках, I единичная матрица.
Аналогично взаимная ковариационная матрица между сигналами антенных решеток X и Y определяется [4] как
Rxy=E[X(t)•Y*(t)]ASФ*A*.
Покажем, что матрица ASA* имеет ранг d, а ковариационная матрица Rxx имеет собственное значение, равное σ2, кратностью (m-d).
Из линейной алгебры [7, с.31] следует, что
ρ(ASA*) = min(ρ(A)•ρ(S)), (10)
где ρ(•) обозначает ранг матричного аргумента.
Столбцы (mxd) матрицы А линейно независимы, поэтому ρ(a)=d. Поскольку (dxd) матрица S несингулярна, r(S)=d. Таким образом, r(ASA*)=d и, следовательно, матрица ASA* будет иметь (m-d) нулевых собственных значений, а матрица (ASA*+σ2•I) будет иметь (m-d) минимальных собственных значений, равных σ2.
Если собственные значения ковариационной матрицы Rxx упорядочить, {λ1>λ2>...>λm} то [1, 4]
Далее рассмотрим пучок матриц
где Cxx Rxx -λmin •I.
Пространства столбцов матриц ASA* и ASФ*A* совпадают. По этой причине ρ(ASA*- γ•ASФ*A*) для всех значений γ будет равно d, за исключением значений
при которых i-я строка матриц обращается в нуль. Таким образом
Следовательно, ранг матричного пучкаCxx- γ •Rxy} также уменьшается до (d-1) в случаях, когда g принимает значения (14). Однако, по определению [7, c. 135] значения, понижающие ранг матричного пучка, есть обобщенные собственные значения этого пучка, т. е. матричной пары (Cxx, Rxy). Поскольку обе матрицы пары определяют одно и то же подпространство, обобщенные собственные значения, соответствующие общему нуль-пространству двух матриц, будут равны нулю, т. е. d обобщенных собственных значений лежат на единичном круге и равны диагональным элементам матрицы Ф, а (m-d) обобщенных собственных значений равны нулю.
Таким образом, истинные пеленги на источники сигналов определяются формулой
а оценки пеленгов формулой (1).
Недостатком прототипа являются большие вычислительные затраты.
Целью изобретения является уменьшение вычислительных затрат, необходимых для реализации способа.
Поставленная цель достигается тем, что в известный способ, включающий прием сигналов пеленгуемых источников двумя антенными решетками, содержащими по m датчиков каждая, причем каждому датчику в первой антенной решетке соответствует датчик во второй антенной решетке с идентичными характеристиками и ориентацией, смещенный относительно первого на расстоянии Δ, причем это смещение одинаково по абсолютной величине и направлению для всех пар датчиков, оценивание взаимной ковариационной матрицы Rxy сигналов первой и второй антенных решеток, определение обобщенных собственных значений xi (i=1, 2, m) матричной пары, второй матрицей которой является взаимная ковариационная матрица Rxy, выделение из полученных обобщенных собственных значений d значений ξk (k=1, 2,d), равных по модулю единице, внесены следующие отличия: первую матрицу упомянутой матричной пары получают путем транспонирования и комплексного сопряжения взаимной ковариационной матрицы Rxy, а пеленги Θk на источники сигналов относительно нормали к направлению смещения Δ второй антенной решетки относительно первой определяют как арксинусы от половинных аргументов обобщенных собственных значений xk, умноженных на скорость распространения радиоволн c и деленных на частоту принимаемых сигналов ω0 и величину смещения Δ:
На чертеже показаны первая антенная решетка из четырех датчиков и вторая антенная решетка из четырех датчиков, пронумерованных цифрами со штрихом. Смещение дополнительной антенной решетки относительно основной антенной решетки обозначено через Δ. Сигналы, принятые датчиками первой антенной решетки, обозначены через X, а сигналы, принятые второй антенной решеткой, - через Y.
Сигналы, принятые i-ми датчиками первой антенной решетки X и второй антенной решетки Y, имеют вид:
где Sk(t) сигнал k-го волнового фронта, принятый первым датчиком антенной решетки X; Θk направление прихода сигнала k-го источника относительно нормали к направлению смещения Δ; ai(Θk) отклик k-го датчика каждой антенной решетки, определяемый относительно отклика первого датчика той же антенной решетки при воздействии одиночного волнового фронта сигнала под углом Θk; Δ смещение между антенными решетками; uxi(t), uyi(t) - аддитивные шумы i-го датчика соответственно антенных решеток X и Y.
В более удобной и компактной матричной записи эти соотношения принимают вид:
X(t)=AS(t)+ux(t),
Y(t)=AФS(t)+ uy(t),
где
Xt(t)=[xxl(t),xm(t)]
ux(t)=[uxl(t),uxm(t)]
Yt=[yl(t),ym(t)]
uy(t)=[uyl(t),uym(t)]
t знак транспонирования.
Вектор S(t) есть d-элементный вектор волновых фронтов сигналов, принимаемых первым датчиком антенной решетки X. Через Ф обозначена диагональная (dxd) матрица фазовых задержек между одноименными датчиками в антенных решетках X и Y для воздействующих d волновых фронтов:
Ф = diag[ejωoΔsinΘ1/c,...,ejωoΔsinΘd/c], (20)
а через A (mdx) матрица направлений, столбцы которой являются векторами направлений сигналов для d воздействующих волновых фронтов
at(Θk) = [a1(Θk),...,am(Θk)]. (21)
Взаимная ковариационная матрица между сигналами антенных решеток X и Y определяется [4] как
Rxy= E[X(t)•Y*(t)] = ASФ*A*, (22)
где * знак комплексного сопряжения и транспонирования, E знак математического ожидания. Через S обозначена ковариационная (dxd) матрица сигналов источников S(t), т. е.
S=E[S(t)•S*(t)]
а через σ2 дисперсия некоррелированного белого шума, присутствующего во всех датчиках, I единичная матрица.
Рассмотрим пучок матриц R
Отметим, что матрица Ф является не только диагональной, но и унитарной матрицей, т. е.
ФФ*=I
Матрица взаимных корреляций источников S в общем случае является эрмитовой недиагональной матрицей. Однако, если источники сигналов взаимно не коррелированы (это может иметь место,в частности, при пеленгации независимых источников излучения), эта матрица является диагональной с мощностями (дисперсиями) источников на диагонали. В этом случае матрицы Ф и S коммутируют и, следовательно, выражение для матричного пучка (24) может быть преобразовано к виду:
R
Ранг пучка (26) для всех значений ξ равен числу источников пеленгуемых сигналов d, за исключением значений
ξk= Ф
при которых k-й диагональный элемент диагональной матрицы (Ф - ξkФ*) обращается в нуль и, следовательно, ранг матричного пучка R
Таким образом, истинные пеленги на источники сигналов определяются формулой
а для получения оценок пеленгов вместо Ф
Отметим, что на практике из-за ограниченной точности вычислений d обобщенных собственных значений ξk будут находиться вблизи единичного круга и соответствовать искомым оценкам Ф
Кроме того, следует отметить, что получение истинной взаимной ковариационной матрицы Rxy в соответствии с (22) требует бесконечного интервала времени, а практически в качестве матрицы Rxy, как блока полной корреляционной матрицы антенных решеток X и Y, используется ее максимально правдоподобная оценка [8]
Количество выборок сигналов N, необходимое для адекватного оценивания ковариационной матрицы, зависит от отношения сигнал/шум в датчиках антенной решетки и требуемой точности оценки пеленгов. Для целей пеленгации сигналов с высоким разрешением, как правило, N≥5m.
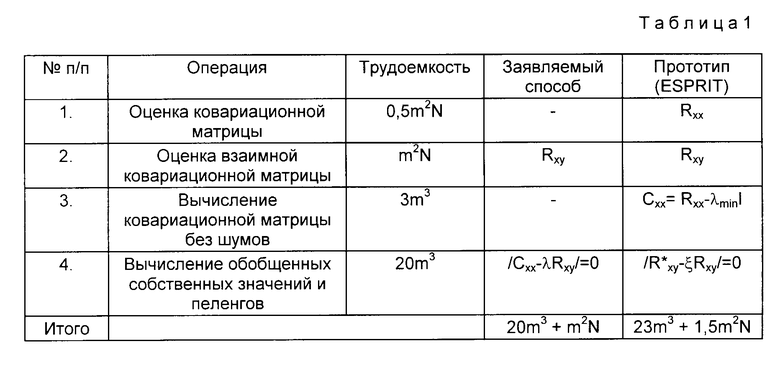
Предлагаемое решение направлено на уменьшение вычислительных затрат, необходимых для реализации способа. Поэтому сопоставительный анализ с прототипом проведем по вычислительным затратам на реализацию заявляемого способа и прототипа.
Вычислительные затраты оценивать по количеству наиболее трудоемких операций умножения. Для оценки ковариационной и взаимной ковариационной матриц требуется соответственно 0,5m2N и m2N операций умножения, где N число временных отсчетов сигнала (объем выборки), а m размерность матриц (число датчиков в каждой антенной решетке). Вычисление собственных значений корреляционной матрицы требует примерно 3m3 операций умножения [9, c. 284] Вычисление обобщенных собственных значений требует примерно 20m3 операций [10, c. 150] Операции, требующиеся для оценки пеленгов источников излучения в соответствии с заявляемым способом и способом прототипом, сведены в таблицу.
При объеме выборки N=5m вычислительные затраты для определения пеленгов в соответствии с заявляемым способом и в соответствии со способом прототипом составляют соответственно, Q3=25m3 и Qn=30,5m3.
Таким образом, выигрыш в вычислительных затратах заявляемого способа по отношению к прототипу составляет:
W=Qn/Q3=1,22 раза.
Источники информации:
1. Караваев В.В. Сазонов В.В. Статистическая теория пассивной локации М. Радио и связь, 1987.
2. Монзинго Р.А. Миллер Т.У. Адаптивные антенные решетки: Введение в теорию: Пер. с англ. М. Радио и связь, 1986.
3. Nickel U. Angular superresolution with phased radar: a several of algorithms and operational constrants. //IEE Proc. 1987, N 1, p. 53-58.
4. Полрадж А. Рой Р. Кайлатх Т. Оценивание параметров сигнала методом поворота подпространств. // ТИИЭР, т.74, 1986, N 7, с.165-166.
5. Марпл.-мл. С.Л. Цифровой спектральный анализ и его приложения: Пер.с англ. М. Мир, 1990.
6. Roy R. Paulraj A. Kailath T. Metod for estimating signai source iocation and signal parameters using array of signal sensor pairs. US Patents N 4,750,147.
7. Воеводин В.В. Кузнецов Ю.А. Матрицы и вычисления.М. Наука, 1984.
8. Андерсон Т. Введение в многомерный статистический анализ. М. Физматгиз, 1963.
9. Воеводин В.В. Вычислительные основы линейной алгебры. М. Наука, 1977.
10. Молчанов И. Н. Машинные методы решения прикладных задач. Алгебра, приближение функций. Киев: Наук. думка, 1987.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕЛЕНГОВАНИЯ С ПОВЫШЕННОЙ РАЗРЕШАЮЩЕЙ СПОСОБНОСТЬЮ | 2010 |
|
RU2491569C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2007 |
|
RU2339966C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2551355C1 |
| СПОСОБ ПЕЛЕНГАЦИИ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ НА ОДНОЙ ЧАСТОТЕ | 2014 |
|
RU2556699C1 |
| Способ пеленгации широкополосных сигналов с повышенной разрешающей способностью | 2019 |
|
RU2752878C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЗАИМНОЙ ЗАДЕРЖКИ СИГНАЛОВ | 2014 |
|
RU2568897C1 |
| СПОСОБ МНОГОСИГНАЛЬНОЙ ПЕЛЕНГАЦИИ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ НА ОДНОЙ ЧАСТОТЕ | 2008 |
|
RU2382379C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕЛЕНГАЦИОННОЙ ПАНОРАМЫ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ НА ОДНОЙ ЧАСТОТЕ | 2012 |
|
RU2528177C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК НАЛОЖИВШИХСЯ ДРУГ НА ДРУГА РАДИОСИГНАЛОВ ОДНОЙ ЧАСТОТЫ | 2013 |
|
RU2551115C1 |
| СПОСОБ ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2562616C1 |
Изобретение относится к радиотехнике и может быть использовано для угловых измерений в радиолокационных, гидролокационных, геофизических и других локационных системах. Цель изобретения - уменьшение вычислительных затрат, необходимых для реализации способа. Цель достигается за счет оценивания только взаимной ковариационной матрицы Rxy сигналов, принятых первой и второй антенными решетками, идентичными между собой и смещенными друг относительно друга на расстояние Δ. Пеленги на источники излучения относительно нормали к направлению смещения Δ определяются из ненулевых обобщенных собственных значений матричной пары { R
Способ пеленгации источников излучения на основе отражения подпространств, включающий прием сигналов пеленгуемых источников двумя антенными решетками, содержащими по m датчиков каждая, причем каждому датчику в первой антенной решетке соответствует датчик во второй антенной решетке с идентичными характеристиками и ориентацией, смещенный относительно первого на расстояние Δ, причем это смещение одинаково по абсолютной величине и направлению для всех пар датчиков, оценивание взаимной ковариационной матрицы Rxy сигналов первой и второй антенных решеток, определение обобщенных собственных значений ξi(i=1,2 ..., m) матричной пары, второй матрицей которого является взаимная ковариационная матрица Rxy, выделение из полученных обобщенных собственных значений d значений ξк(k=1,2 ..., d), равных по модулю единице, отличающийся тем, что первую матрицу упомянутой матричной пары получают путем транспонирования и комплексного сопряжения взаимной ковариационной матрицы Rxy, а пеленги θк на источники сигналов относительно нормали к направлению смещения Δ второй антенной решетки относительно первой антенной решетки определяют как арксинусы от половинных аргументов обобщенных собственных значений xк, умноженных на скорость распространения радиоволн С и деленных на частоту принимаемых сигналов ωo и величину смещения Δ.й
| Монзинго Р.А., Миллер Т.У | |||
| Адаптивные антенные решетки | |||
| Введение в теорию./Пер | |||
| с англ | |||
| - М.: Радио и связь, 1986 | |||
| Полрадж А., Рой Р., Кайлахт Т | |||
| Оценивание параметров сигнала методом поворота подпространства | |||
| - ТИИЭР, т | |||
| Приспособление в центрифугах для регулирования количества жидкости или газа, оставляемых в обрабатываемом в формах материале, в особенности при пробеливании рафинада | 0 |
|
SU74A1 |
| Устройство для отыскания металлических предметов | 1920 |
|
SU165A1 |
