Изобретение относится к области радиотехнической разведки и может быть использовано для определения местоположения источника рассеянного радиоизлучения радиолокационными станциями воздушных объектов с помощью приемных постов с параллельным сканированием радиоизлучений по частоте.
Известен способ получения радиотехнической информации станциями радиотехнической разведки, входящими в состав многопозиционного комплекса пассивной локации, заключающийся в том, что разнесенными на местности приемными постами радиоизлученые от воздушных объектов данные направляют на центральный приемный пункт, где их преобразуют в единую центральную, например, декартову систему координат с началом в центральном приемном посту, все вновь полученные изменения положения воздушного объекта группируют по радиотехническим признакам и определяют местоположение воздушного объекта решением триангуляционной задачи  - для приемных постов с параллельным сканированием радиоволн по частоте, где: xi, yi, zi - координаты приемного поста, x, y, z - координаты воздушного объекта, далее преобразованные результаты измерений отождествляют между собой и с построенными ранее траекториями и определяют принадлежность поступивших данных тем или иным воздушным объектам или уже имеющимся траекториям их полета, не отождествленные данные используют для завязки новых траекторий воздушных объектов [1].
- для приемных постов с параллельным сканированием радиоволн по частоте, где: xi, yi, zi - координаты приемного поста, x, y, z - координаты воздушного объекта, далее преобразованные результаты измерений отождествляют между собой и с построенными ранее траекториями и определяют принадлежность поступивших данных тем или иным воздушным объектам или уже имеющимся траекториям их полета, не отождествленные данные используют для завязки новых траекторий воздушных объектов [1].
Известно устройство многопозиционного комплекса пассивной локации, состоящее из нескольких информационных датчиков приемных постов станций радиотехнической разведки способных измерять в азимутальной и угломестной плоскостях направления движения воздушных объектов с излучающими радиоэлектронными средствами и фиксировать момент перехода от излучающих средств при смене направления движения воздушных объектов, приемных постов, способных параллельно сканировать по частоте и определять местоположение воздушного объекта решением триангуляционной задачи [1].
Реализация в станциях радиотехнической разведки синхронного сканирования по частоте и мгновенного кругового обзора по азимуту позволяет наряду с грубыми пеленгами - первичными измерениями типа «азимута» вычислять на центральном приемном посту комплекса пассивной локации разности времени приема сигналов. Однако излучение радиоэлектронных средств воздушных объектов обнаруживается не всеми приемными постами и имеет место неполнота обрабатываемой поступившей информации. Не предусмотрено отождествление и объединение векторов наблюдений с координатной информацией, характеризующейся неполнотой своего состава. Происходит и нерациональное использование в алгоритмах траекторного сопровождения воздушных объектов избыточной информации.
Известен способ получения радиотехнической информации станциями радиотехнической разведки, входящими в состав многопозиционного комплекса пассивной локации, заключающийся в том, что разнесенными на местности приемными постами радиоизлучения от воздушных объектов данные направляют на центральный приемный пост, где их преобразуют в единую центральную декартову систему координат с началом в центральном приемном посту, все вновь полученные пеленги или разности времен излучения сигналов от воздушных объектов группируют по радиотехническим признакам, после чего решают задачу отождествления частных трасс полета воздушных объектов и радиотехнических отметок, полученных в результате решения задачи определения местоположения воздушных объектов решением триангуляционной задачи
 - для приемных постов с параллельным сканированием радиоволн по частоте, где xi, yi, zi - координаты приемных постов, x, y, z - координаты воздушного объекта, при этом отождествление трасс и радиотехнических отметок производят расчетом попадания отметки воздушного объекта в строб автосопровождения при выполнении условия
- для приемных постов с параллельным сканированием радиоволн по частоте, где xi, yi, zi - координаты приемных постов, x, y, z - координаты воздушного объекта, при этом отождествление трасс и радиотехнических отметок производят расчетом попадания отметки воздушного объекта в строб автосопровождения при выполнении условия 
Однако α, β - фильтры в блоке трассового сопровождения воздушных объектов не позволяют получать четкие траектории движения воздушных объектов и их координаты в заданный момент времени. В многопозиционных комплексах пассивной локации, где единичные замеры от одного и того же воздушного объекта могут поступать на вторичную обработку от разных позиций воздушного объекта, причем нерегулярно во времени и с различной точностью, α, β - фильтры не эффективны.
Известно устройство многопозиционного комплекса пассивной локации, состоящее из нескольких информационных датчиков приемных постов станции радиотехнической разведки, способных измерять в азимутальных и угломестных плоскостях направления движения воздушных объектов с излучающими радиоэлектронными средствами и фиксировать момент перехода импульсов от излучающих средств при смене направления движения воздушных объектов, приемных постов, способных сканировать по частоте и определять местоположение воздушного объекта путем решения триангуляционной задачи, электронного блока автосопровождения воздушных объектов в стробе размером
В однопозиционных обзорных радиолокационных станциях, в которых единичные замеры поступают на вторичную обработку регулярно с периодом обзора, а их точность для каждого воздушного объекта неизменна в нескольких соседних периодах обзора, широко используют простейшие фильтры первого порядка (по каждой координате) с постоянными коэффициентами сглаживания α, β (так называемые «α, β - фильтры»). Эти фильтры при соответствующем выборе α, β обеспечивают оценку положения и скорости воздушного объекта при его равномерном прямолинейном движении с минимальной среднеквадратической ошибкой.
Наиболее близким по технической сути к предлагаемому является способ получения радиотехнической информации станциями радиотехнической разведки, входящими в состав многопозиционного комплекса пассивной локации, заключающийся в том, что разнесенными на местности приемными постами радиоизлучения от воздушных объектов данные направляют на центральный приемный пост, где их преобразуют в центральную декартову систему координат с началом в центральном приемном посту, все полученные первичные радиотехнические измерения привязывают к сопровождаемым радиотехническим траекториям воздушных объектов на множестве изолированных радиотехнических отметок, сформированным в течении нескольких циклов сканирования, выполняют процедуру обнаружения радиотехнических траекторий, которая состоит из следующих действий: вычисляют плоскостные координаты x, y, z воздушного объекта; определяют размеры стробов d привязки, исходя из максимальной скорости воздушных объектов и ошибок определения координат в стробе автозахвата
Известно устройство многопозиционного комплекса пассивной локации, состоящее из нескольких информационных датчиков приемных постов станции радиотехнической разведки, способных измерить в азимутальной и угломестной плоскостях направление движения воздушных объектов с излучающими радиотехническими средствами, фиксировать момент перехода импульсов от излучающих средств при смене направления движения воздушных объектов, сканировать по частоте и определять местоположение воздушного объекта путем решения триангуляционной задачи, центрального поста управления электронного блока автосопровождения воздушных объектов в стробе
В многопозиционных комплексах пассивной локации, где единичные замеры по одному и тому же воздушному объекту могут поступать на вторичную обработку от разных позиций нерегулярно во времени и с различной точностью, простейшие «α, β - фильтры» неэффективны, поэтому применяют более сложные фильтры Калмана в различных модификациях, хотя их реализация требует более высокой производительности вычислительных средств.
Для каждого момента времени tk+1 фильтр Калмана формирует сглаженную оценку вектора состояния 

 .
.
Выражения
Недостатком известного способа получения радиотехнической информации на радиотехническом комплексе является: неполнота полученной приемными постами и обрабатываемой центральным приемным постом информации о движущихся воздушных объектах; неполный состав координатной информации не отождествляется и не объединяется с векторами наблюдения за воздушными объектами; избыточная информация нерационально используется в алгоритмах траекторного сопровождения воздушных объектов.
Происходит задержка в обнаружении трассы воздушных объектов, срыв их трассы сопровождения. Снижается показатель непрерывного сопровождения цели. Увеличивается среднеквадратичное отношение ошибок определения координат и параметров движения траекторий сопровождаемых воздушных объектов, что значительно снижает качество сопровождения воздушных объектов в существующих многопозиционных комплексах пассивной локации. На этапе сопровождения воздушного объекта по радиотехнической информации не целесообразно производить пересчет наблюдаемых параметров в радиотехнические отметки с последующей фильтрацией результатов решения триангуляционной задачи.
Существующие алгоритмы обработки радиотехнической информации выполняются в два этапа с последующим этапом ее объединения. На первичном этапе ведут обнаружение сигналов, измерение параметров сигналов и наблюдаемых координат. На вторичном этапе обработки ведут привязку отметок, поступивших от одной цели по времени, и вычисление параметров траектории цели. В процессе вторичной обработки решается задача обнаружения и сопровождения трасс целей. Такое деление не учитывает особенности построения многопозиционного комплекса пассивной локации. Излучение радиоэлектронных станций воздушных объектов обнаруживается не всеми приемными постами, в этом случае наблюдается неполный вектор наблюдаемой информации, в отсутствии чего невозможно определение всех пространственных координат цели. Неполнота обрабатываемой информации приводит к задержке в обнаружении трассы, срыву трассы с сопровождения, что приводит к снижению показателя непрерывного сопровождения, а также к увеличению среднеквадратического отклонения ошибок определения координат и параметров движения траектории сопровождаемой цели.
Координаты ВО определяются только по минимально необходимому количеству первичных радиотехнических измерений, остальные измерения не учитываются при формировании отметки и в алгоритмах фильтрации.
Для существующих алгоритмов фильтрации необходимо одно измерение пеленга на цель минимум 2-мя приемными постами за один обзор, чтобы определить координату воздушного объекта и только потом его оценивать.
Отсутствуют методы использования в алгоритмах траекторного сопровождения избыточности первичных радиотехнических измерений от приемного поста. Из-за отсутствия определения приоритетности РТИ при определении координат ВО (расчета центра тяжести фигуры), а также при последующей фильтрации учета всего вектора наблюдаемой информации происходит ухудшение параметров движения траектории сопровождаемой цели.
Перечисленные факторы приводят к необходимости создания фильтра пеленговой информации в многопозиционных комплексах пассивной локации, который учитывает разновременность и неполноту наблюдаемых параметров.
Технический результат по предлагаемому способу получения радиотехнической информации станциями радиотехнической разведки в составе многопозиционного комплекса пассивной локации, заключающемуся в том, что разнесенными на местности приемными постами станции радиотехнической разведки через датчики с параллельным сканированием по частоте получают данные пассивного радиоизлучения от воздушных объектов - их пеленг, несущая частота бортового радиоэлектронного средства воздушного объекта и момент времени получения измерения пеленга, данные направляют на центральный приемный пост, преобразуют в единую центральную декартову систему координат с началом в центральном приемном посту и привязывают к имеющимся на сопровождении радиотехническим траекториям воздушных объектов, на множестве изолированных радиотехнических отметок по воздушному объекту, сформированном при сканировании, производят операцию фильтрации результатов решения триангуляционной задачи обнаружения радиотехнической траектории воздушного объекта в следующей последовательности:
определяют размеры стробов автозахвата



 , где σβ - среднеквадратичная ошибка измерения пеленга, уточняют значение вектора состояния
, где σβ - среднеквадратичная ошибка измерения пеленга, уточняют значение вектора состояния  и алгоритмическую ковариационную матрицу
и алгоритмическую ковариационную матрицу  , где E - диагональная единичная матрица, и производят оценку работы фильтра при сглаживании пеленга на станции радиотехнической разведки по частному показателю среднеквадратического отклонения ошибки измерения пеленга
, где E - диагональная единичная матрица, и производят оценку работы фильтра при сглаживании пеленга на станции радиотехнической разведки по частному показателю среднеквадратического отклонения ошибки измерения пеленга  , где Nреал - количество реализаций (Nреал=1000), достигается тем, что при сопровождении воздушного объекта по первичной радиотехнической информации на приемных постах производят одновременную первичную фильтрацию отдельных пеленгов по времени их поступления, при этом движение воздушного объекта принимают прямолинейным и равномерным, а в противном случае - принимают за маневр, а формирование начальной оценки приближенного вектора параметров траектории воздушного объекта и ковариационной матрицы ошибок на приемных постах производят по первому пеленгу, поступившему от одного из информационных датчиков по новому воздушному объекту, далее производят окончательную фильтрацию информации с получением уточненного вектора параметров траектории каждого воздушного объекта и алгоритмической ковариационной матрицы ошибок параметров наблюдения приемных постов, выдают точную оценку параметров траектории каждого воздушного объекта для четкого отслеживания характера и параметров его полета, при этом на приемных постах фильтрацию отдельных пеленгов воздушного объекта по времени их поступления производят следующим образом: задают вектор состояния траектории воздушного объекта в виде S(t)=(x, y, Vx, Vy, a
x, a
y), где Vx, Vy - проекции вектора скорости координат x, y; a
x, a
y - проекции ускорения координат x, y, фильтрацию координатной информации производят по зависимости
, где Nреал - количество реализаций (Nреал=1000), достигается тем, что при сопровождении воздушного объекта по первичной радиотехнической информации на приемных постах производят одновременную первичную фильтрацию отдельных пеленгов по времени их поступления, при этом движение воздушного объекта принимают прямолинейным и равномерным, а в противном случае - принимают за маневр, а формирование начальной оценки приближенного вектора параметров траектории воздушного объекта и ковариационной матрицы ошибок на приемных постах производят по первому пеленгу, поступившему от одного из информационных датчиков по новому воздушному объекту, далее производят окончательную фильтрацию информации с получением уточненного вектора параметров траектории каждого воздушного объекта и алгоритмической ковариационной матрицы ошибок параметров наблюдения приемных постов, выдают точную оценку параметров траектории каждого воздушного объекта для четкого отслеживания характера и параметров его полета, при этом на приемных постах фильтрацию отдельных пеленгов воздушного объекта по времени их поступления производят следующим образом: задают вектор состояния траектории воздушного объекта в виде S(t)=(x, y, Vx, Vy, a
x, a
y), где Vx, Vy - проекции вектора скорости координат x, y; a
x, a
y - проекции ускорения координат x, y, фильтрацию координатной информации производят по зависимости  ,
,  , где D - задаваемое расстояние от пеленгатора в направлении азимута при наличии априорной неопределенности по выбранной фиктивной дальности, выбираемое из предельных возможностей станции радиотехнической разведки, а измеренный азимут, поступивший на вход фильтра, пересчитывается в плоскостные координаты x, y; далее с учетом влияния ошибок экстраполяции производят обратный пересчет плоскостных координат в азимут при сглаживании пеленга, при этом матрицу производной функции наблюдения выражают в виде
, где D - задаваемое расстояние от пеленгатора в направлении азимута при наличии априорной неопределенности по выбранной фиктивной дальности, выбираемое из предельных возможностей станции радиотехнической разведки, а измеренный азимут, поступивший на вход фильтра, пересчитывается в плоскостные координаты x, y; далее с учетом влияния ошибок экстраполяции производят обратный пересчет плоскостных координат в азимут при сглаживании пеленга, при этом матрицу производной функции наблюдения выражают в виде  .
.
Операция по предлагаемой фильтрации данных на приемных постах станции радиотехнической разведки позволяет оперативно оценить наличие и характер траектории полета воздушного объекта, четко следить за траекторией его полета, корректировать траекторию полета воздушного объекта до полного ее уточнения по координатам и пеленгу.
Технический результат по предлагаемому радиотехническому комплексу пассивной локации, состоящему из приемных постов с информационными датчиками станции радиотехнической разведки, способных измерять в азимутальной и угломестной плоскостях направление движения воздушных объектов с излучающими радиотехническими средствами и фиксировать момент прихода импульсов от излучающих средств при смене направления движения воздушного объекта, сканировать по частоте и определять местоположение воздушного объекта путем решения триангуляционной задачи, и оснащенных электронным блоком автосопровождения воздушных объектов
в стробе размером 
 ,
,  , где D - задаваемое расстояние от пеленгатора в направлении азимута, блока пересчета измеренного азимута воздушного объекта в плоскостные координаты x, y, блока расчета ошибок экстраполяции и измерений и обратного пересчета плоскостных координат в азимут, блока составления матрицы производной функции наблюдения в виде
, где D - задаваемое расстояние от пеленгатора в направлении азимута, блока пересчета измеренного азимута воздушного объекта в плоскостные координаты x, y, блока расчета ошибок экстраполяции и измерений и обратного пересчета плоскостных координат в азимут, блока составления матрицы производной функции наблюдения в виде  , блока вычисления Δβ экстраполированного и измеренного пеленгов (при - π<Δβ≤π), блока определения коэффициента усиления k, блока уточнения вектора состояния S(t) и алгоритмической ковариационной матрицы, а также блока оценки работы фильтра при сглаживании пеленга.
, блока вычисления Δβ экстраполированного и измеренного пеленгов (при - π<Δβ≤π), блока определения коэффициента усиления k, блока уточнения вектора состояния S(t) и алгоритмической ковариационной матрицы, а также блока оценки работы фильтра при сглаживании пеленга.
Предлагаемая конструкция фильтра динамики воздушного объекта в отличии от существующих позволяет оценивать координаты сопровождения трассы воздушного объекта по информации от одного приемного поста. Приемные посты станции радиотехнической разведки позволяют оперативно оценивать наличие и характер траектории полета воздушного объекта, четко следить за траекторией его полета. Фильтрация данных на первичных постах позволяет корректировать траекторию полета воздушного объекта до полного ее уточнения.
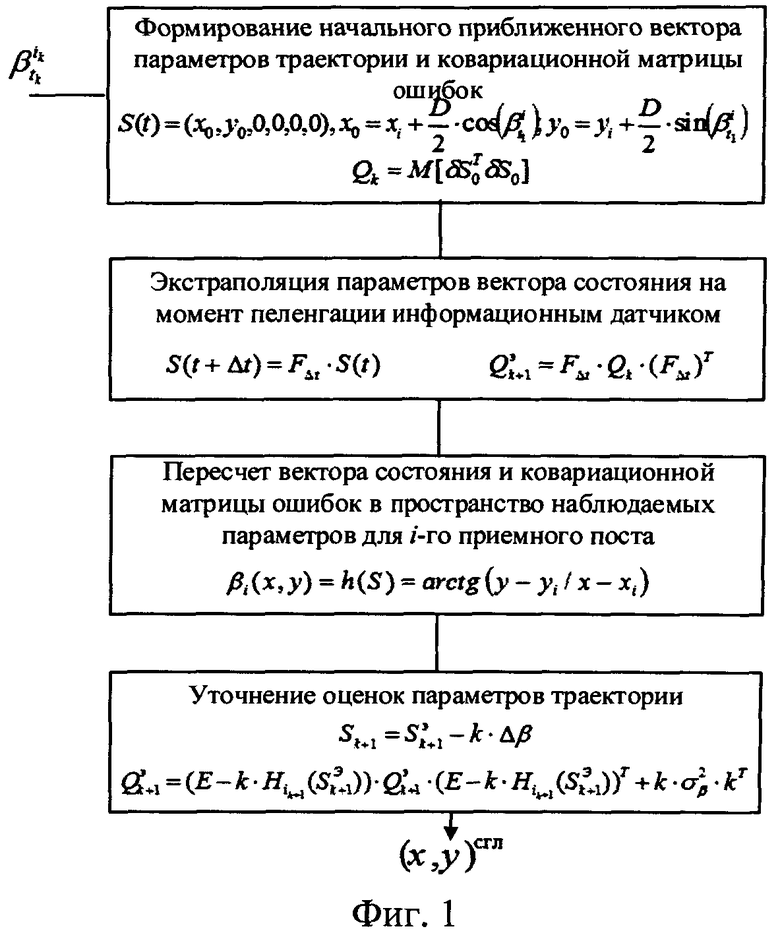
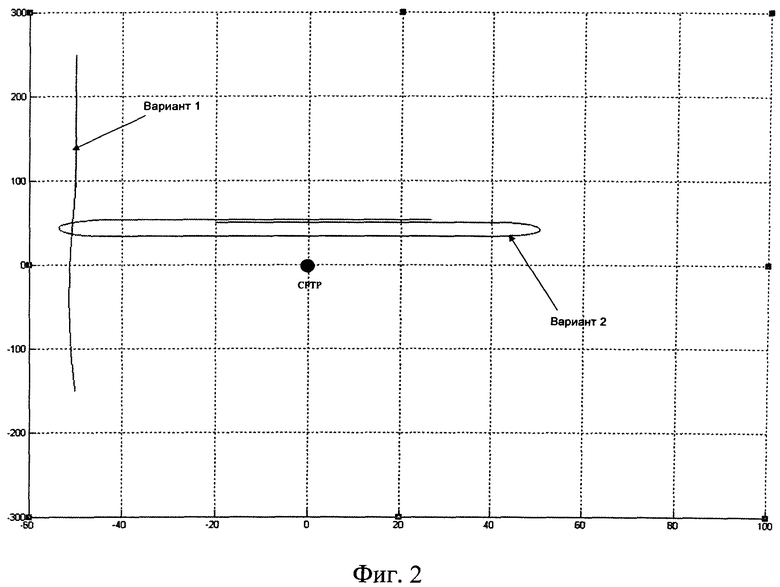
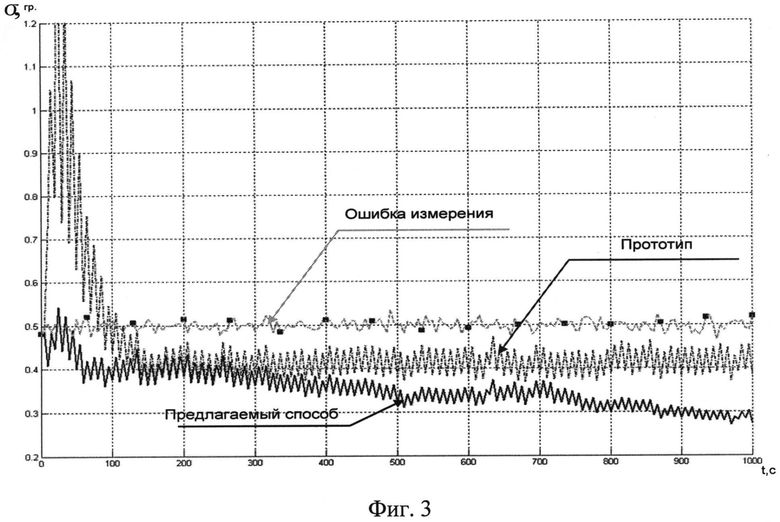
Изобретение поясняется графическими материалами, где на фиг. 1 представлена блок-схема работы фильтра предлагаемой станции радиотехнической разведки, на фиг. 2 - оценка траектории прямолинейного, равномерного движения воздушного объекта и маневрирующего воздушного объекта; на фиг. 3 и 4 представлены результаты способов получения радиотехнической информации - пунктирной линией показаны ошибки измерения, сплошной линией - значения оцениваемого показателя предлагаемого способа, пунктирной линией (с точкой) - способа представленного в прототипе, на фиг. 3 приведены результаты измерения пеленга от времени наблюдения прямолинейного и равномерного движения воздушного объекта, на фиг. 4 - результаты измерения пеленга от времени для маневрирующего объекта, на фиг. 5 - блок-схема устройства станции радиотехнической разведки.
Устройство радиотехнического комплекса (фиг. 5) состоит из трех приемных постов с информационными датчиками 1 станции радиотехнической разведки, способных измерять в азимутальной и угломестной плоскостях направление движения воздушного объекта с излучающими радиотехническими средствами и фиксировать момент прихода импульсов от излучающих средств при смене направления движения воздушного объекта, сканировать по частоте и определять местоположение воздушного объекта путем решения триангуляционной задачи, и оснащенных антеннами 2 с устройством 3 их управления, с приемниками 4 радиотехнических сигналов излучаемых радиоэлектронными средствами воздушных объектов, связанными с устройством 5 измерения сдвига принимаемых сигналов по времени и с фильтрами 6 динамики движения воздушных объектов, состоящими из связанных: электронного блока 7 измерения пеленга на воздушный объект в начальный и последующий момент времени (t,t+1); блока 8 установки вектора состояния траектории воздушного объекта S(t)=(x, y, Vx, Vy, a
x, a
y), где Vx,Vy - проекции вектора скорости координат x, y; a
x, a
y - проекции ускорения координат x, y, производящего фильтрацию координатной информации по зависимости  ,
,  , где D - задаваемое расстояние от пеленгатора в направлении азимута, блока 9 пересчета измеренного азимута воздушного объекта при дальности D в плоскостные координаты x, y; блока 10 расчета ошибок
, где D - задаваемое расстояние от пеленгатора в направлении азимута, блока 9 пересчета измеренного азимута воздушного объекта при дальности D в плоскостные координаты x, y; блока 10 расчета ошибок 

Сущность представленного способа получения радиотехнической информации информационными датчиками с параллельным сканированием по частоте состоит в следующем.
Многопозиционный комплекс пассивной локации составляют из трех информационных датчиков приемных постов V={V1, V2, V3} радиотехнической разведки, которые располагают в точках с координатами (xi, yi, xi)T, где 

 где
где  , D - задаваемое расстояние от пеленгатора в направлении азимута.
, D - задаваемое расстояние от пеленгатора в направлении азимута.
Для начальной алгоритмической ковариационной матрицы ошибок выбирают диагональную матрицу, диагональные элементы которой равны максимально возможным дисперсиям скорости и ускорения воздушного объекта в пределах априорной неопределенности, элементы верхней части матрицы размерностью 2×2 вычисляют по формуле
 .
.
Модель движения цели составляют в виде S(t+Δt)=FΔt·S(t), где Δt=tk+1-tk - период обзора многопозиционного комплекса пассивной локации. Матрица перехода имеет вид
 .
.
Функция наблюдения для каждого из информационных датчиков имеет вид:  . Матрица производной функции наблюдения имеет вид
. Матрица производной функции наблюдения имеет вид  .
.
При условии, что имеется некоторая начальная оценка вектора состояния Sk траектории цели и алгоритмическая ковариационная матрица ошибок оценивания вектора состояния в момент времени tk, и получено новое измерение пеленга 
1) вычисляют экстраполированные значения вектора состояния и алгоритмической ковариационной матрицы
 ;
;
 ;
;
2) вычисляют экстраполированное значение пеленга
 ;
;
3) вычисляют матрицу производной функции наблюдения
 ;
;
4) рассчитывают дисперсию ошибки экстраполяции пеленга
 ;
;
5) вычисляют разность экстраполированного пеленга и измеренного 
6) определяют коэффициент усиления
 , где σβ - среднеквадратическая ошибка измерения пеленга;
, где σβ - среднеквадратическая ошибка измерения пеленга;
7) уточняют значение вектора состояния

8) уточняют алгоритмическую ковариационную матрицу
 , где E - диагональная единичная матрица.
, где E - диагональная единичная матрица.
Далее осуществляют оценку работы триангуляционного способа определения местоположения пеленга непосредственно на станции радиотехнической разведки по частному показателю среднеквадратического отклонения ошибки измерения пеленга  , где Nреал - количество реализаций (Nреал=1000).
, где Nреал - количество реализаций (Nреал=1000).
Таким образом структурная схема фильтрации пеленгационной информации, полученной информационными датчиками по предлагаемому способу, имеет вид, представленный на фиг. 1.
Рассмотрим два варианта движения воздушного объекта относительно многопозиционного комплекса пассивной локации.
На фиг. 2 представлены трассы воздушного объекта движущегося прямолинейно и равномерно (вариант 1) и воздушного объекта, совершающего движение с маневром (вариант 2).
Задают следующие условия моделирвоания: темп обзора частотного диапазона станциями радиотехнической разведки - 5 с; скорость движения воздушного объекта - 300 м/с, его курсовая скорость - ≤5 м/с; среднеквадратичная ошибка измерения пеленга - σβ=0,5°.
В результате оценки плоскостных координат воздушных объектов при фильтрации предлагаемым способом и способом, представленным в прототипе, были получены результаты, которые представлены на фиг. 3, для прямолинейного движения воздушного объекта и на фиг. 4 - для маневрирующего воздушного объекта.
Представленные графики зависимости среднеквадратичных ошибок измерения пеленга от времени наблюдения воздушного объекта на фиг. 2 - для прямолинейного движения и на фиг. 4 - для маневрирующего воздушного объекта.
По предлагаемому способу получения радиотехнической информации блок 8 комплекса пассивной локации характеризуется применением новых операций, учитывающих при формировании вектора состояния траектории воздушного объекта все радиотехнические измерения, полученные на приемные посты без решения триангуляционной задачи по определению координат воздушного объекта.
Блок 9 пересчета измеренного азимута воздушного объекта при дальности D в плоскостные координаты x, y характеризуется применением новой операции - введением фиктивной дальности D для определения начальных координат x, y воздушного объекта по одному радиотехническому измерению, что позволяет отождествлять и объединять вектора наблюдения с неполным составом координатной информации с траекторией воздушного объекта, избегать длительность переходных процессов алгоритмов фильтрации, в частности: время перехода в установившийся режим, время от момента начала работы до времени стабилизации величины ошибки фильтрации.
Блок 10 расчета ошибок 
Блок 12 расчета матрицы производной функции наблюдения Hi(S), отличающегося тем, что функция наблюдения задается проекцией модели изменения угла пеленга воздушного объекта на оси координат x, y.
Блока 13 вычисления Δβ экстраполированного и измеренного пеленгов (при - π<Δβ≤π) отличается тем, что ошибка вычисляется непосредственно между полученным измерением пеленга и экстраполированным его значением на следующий период обзора, в существующих данная операция выполняется для результата триангуляционной задачи - которая вносит свою ошибку в полученное измерение.
Устройства 17 вычисления уточненных координат (x, y) местоположения воздушного объекта отличается применением новых операций, учитывающих особенности построения комплекса и потока измерений, поступающих от станций радиотехнической разведки с параллельным сканированием, в условиях прогнозируемой радиоэлектронной обстановки и позволяет повысить качество сопровождаемой трассы (фиг. 3 и 4) - среднеквадратичное отклонение ошибки измерения пеленга в предлагаемом способе уменьшилось для прямолинейных участков движения воздушного объекта на 20%, а на участках маневрирования - на 30%.
Предлагаемые способ и радиотехнический комплекс получения радиотехнической информации позволяют проводить качественную фильтрацию и экстраполяцию параметров траектории излучающих воздушных объектов на многопозиционном комплексе пассивной локации уже по первичной радиотехнической информации, получаемый с применением даже одного из постов станций радиотехнической разведки.
Источники информации
1. Зайцев Д.В. Многопозиционные радиолокационные системы / Методы и алгоритмы обработки информации в условиях помех. - М.: Радиотехника, 2007. - с. 16-20.
2. Смирнов Ю.А. Радиотехническая разведка. - М., 1997. - с. 164, 165, 190-193, 203-205, 211.
3. Черняк B.C., Заславский Л.П., Осипов Л.В. Многопозиционные радиолокационные станции и системы «Зарубежная радиоэлектроника» №1 - 1987 - с. 11, 15-17, 29-33, 42-54 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координат радиоизлучающего объекта в рабочей зоне многопозиционного пассивного радиотехнического комплекса и устройство для его осуществления | 2020 |
|
RU2757197C1 |
| СПОСОБ БОНДАРЕНКО А.В. ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599259C1 |
| ТРИАНГУЛЯЦИОННО-ГИПЕРБОЛИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ РАДИОИЗЛУЧАЮЩИХ ВОЗДУШНЫХ ОБЪЕКТОВ В ПРОСТРАНСТВЕ | 2012 |
|
RU2503969C1 |
| СПОСОБ ТРАССИРОВАНИЯ НАЗЕМНЫХ И МОРСКИХ РАДИОИЗЛУЧАЮЩИХ ЦЕЛЕЙ | 2023 |
|
RU2807613C1 |
| СПОСОБ ТРАССОВОГО СОПРОВОЖДЕНИЯ ВОЗДУШНЫХ МАНЕВРИРУЮЩИХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ ПО ПЕЛЕНГОВОЙ ИНФОРМАЦИИ ОТ ОДНОПОЗИЦИОННОЙ СИСТЕМЫ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ ВОЗДУШНОГО БАЗИРОВАНИЯ | 2017 |
|
RU2660498C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ И ПАССИВНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ, ИСПОЛЬЗУЕМАЯ ПРИ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 2004 |
|
RU2275649C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НЕПОДВИЖНЫХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ ПРИ ОДНОКООРДИНАТНОЙ ПЕЛЕНГАЦИИ В СВЯЗАННОЙ СИСТЕМЕ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2834277C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ДВИЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ ПО ИЗМЕРЕНИЯМ ИХ НЕСУЩЕЙ ЧАСТОТЫ | 2021 |
|
RU2776078C1 |
| СПОСОБ ОТОЖДЕСТВЛЕНИЯ ПЕЛЕНГОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ ПО ИХ РАДИОТЕХНИЧЕСКИМ ХАРАКТЕРИСТИКАМ ДВУХПОЗИЦИОННЫМИ ПАССИВНЫМИ РАДИОЭЛЕКТРОННЫМИ СРЕДСТВАМИ | 2017 |
|
RU2656370C1 |
| Способ определения координат источника радиоизлучения в трехмерном пространстве динамической системой радиоконтроля | 2019 |
|
RU2715422C1 |


Изобретение относится к области радиотехнической разведки. Достигаемый технический результат - оперативная оценка наличия и характер траектории полета воздушного объекта (ВО). Указанный результат достигается за счет того, что при сопровождении воздушного объекта по первичной радиотехнической информации на приемных постах производят одновременную первичную фильтрацию отдельных пеленгов по времени их поступления, при этом движение воздушного объекта принимают прямолинейным и равномерным, а в противном случае принимают за маневр, при этом формирование начальной оценки приближенного вектора параметров траектории воздушного объекта и ковариационной матрицы ошибок на приемных постах производят по первому пеленгу, поступившему от одного из информационных датчиков по новому воздушному объекту, далее производят окончательную фильтрацию информации с получением уточненного вектора параметров траектории каждого воздушного объекта и алгоритмической ковариационной матрицы ошибок параметров наблюдения приемных постов, выдают точную оценку параметров траектории каждого воздушного объекта для четкого отслеживания характера и параметров его полета, при этом на приемных постах фильтрацию отдельных пеленгов воздушного объекта по времени их поступления производят определенным образом. 2 н.п. ф-лы, 5 ил.
1. Способ получения радиотехнической информации станциями радиотехнической разведки в составе многопозиционного комплекса пассивной локации, заключающийся в том, что разнесенными на местности приемными постами станций радиотехнической разведки через датчики с параллельным сканированием по частоте получают данные пассивного радиоизлучения от воздушных объектов - их пеленг, несущая частота бортового радиоэлектронного средства воздушного объекта и момент времени получения измерения пеленга, данные направляют на центральный приемный пост, преобразуют в единую центральную декартову систему координат с началом в центральном приемном посту и привязывают к имеющимся на сопровождении радиотехническим траекториям воздушных объектов, на множестве изолированных радиотехнических отметок по воздушному объекту, сформированных при сканировании, производят операцию фильтрации результатов решения триангуляционной задачи обнаружения радиотехнической траектории воздушного объекта в следующей последовательности: определяют размеры стробов автозахвата
 , где σβ - среднеквадратичная ошибка измерения пеленга, уточняют значение вектора состояния и алгоритмическую ковариационную матрицу
, где σβ - среднеквадратичная ошибка измерения пеленга, уточняют значение вектора состояния и алгоритмическую ковариационную матрицу  , где E - диагональная единичная матрица, и производят оценку работы фильтра при сглаживании пеленга на станции радиотехнической разведки по частному показателю среднеквадратического отклонения ошибки измерения пеленга
, где E - диагональная единичная матрица, и производят оценку работы фильтра при сглаживании пеленга на станции радиотехнической разведки по частному показателю среднеквадратического отклонения ошибки измерения пеленга  , где Nреал - количество реализаций (Nреал=1000), отличающийся тем, что при сопровождении воздушного объекта по первичной радиотехнической информации на приемных постах производят одновременную первичную фильтрацию отдельных пеленгов по времени их поступления, при этом движение воздушного объекта принимают прямолинейным и равномерным, а в противном случае принимают за маневр, а формирование начальной оценки приближенного вектора параметров траектории воздушного объекта и ковариационной матрицы ошибок на приемных постах производят по первому пеленгу, поступившему от одного из информационных датчиков по новому воздушному объекту, далее производят окончательную фильтрацию информации с получением уточненного вектора параметров траектории каждого воздушного объекта и алгоритмической ковариационной матрицы ошибок параметров наблюдения приемных постов, выдают точную оценку параметров траектории каждого воздушного объекта для четкого отслеживания характера и параметров его полета, при этом на приемных постах фильтрацию отдельных пеленгов воздушного объекта по времени их поступления производят следующим образом: задают вектор состояния траектории воздушного объекта в виде S(t)=(x, y, Vx, Vy, ax, ay), где Vx, Vy - проекции вектора скорости координат x, y; ax, ay - проекции ускорения координат x, y, фильтрацию координатной информации производят по зависимости
, где Nреал - количество реализаций (Nреал=1000), отличающийся тем, что при сопровождении воздушного объекта по первичной радиотехнической информации на приемных постах производят одновременную первичную фильтрацию отдельных пеленгов по времени их поступления, при этом движение воздушного объекта принимают прямолинейным и равномерным, а в противном случае принимают за маневр, а формирование начальной оценки приближенного вектора параметров траектории воздушного объекта и ковариационной матрицы ошибок на приемных постах производят по первому пеленгу, поступившему от одного из информационных датчиков по новому воздушному объекту, далее производят окончательную фильтрацию информации с получением уточненного вектора параметров траектории каждого воздушного объекта и алгоритмической ковариационной матрицы ошибок параметров наблюдения приемных постов, выдают точную оценку параметров траектории каждого воздушного объекта для четкого отслеживания характера и параметров его полета, при этом на приемных постах фильтрацию отдельных пеленгов воздушного объекта по времени их поступления производят следующим образом: задают вектор состояния траектории воздушного объекта в виде S(t)=(x, y, Vx, Vy, ax, ay), где Vx, Vy - проекции вектора скорости координат x, y; ax, ay - проекции ускорения координат x, y, фильтрацию координатной информации производят по зависимости  ,
,  , где D - задаваемое расстояние от пеленгатора в направлении азимута при наличии априорной неопределенности по выбранной фиктивной дальности, выбираемое из предельных возможностей станции радиотехнической разведки, а измеренный азимут, поступивший на вход фильтра, пересчитывается в плоскостные координаты x, y; далее с учетом влияния ошибок экстраполяции производят обратный пересчет плоскостных координат в азимут при сглаживании пеленга, при этом матрицу производной функции наблюдения выражают в виде
, где D - задаваемое расстояние от пеленгатора в направлении азимута при наличии априорной неопределенности по выбранной фиктивной дальности, выбираемое из предельных возможностей станции радиотехнической разведки, а измеренный азимут, поступивший на вход фильтра, пересчитывается в плоскостные координаты x, y; далее с учетом влияния ошибок экстраполяции производят обратный пересчет плоскостных координат в азимут при сглаживании пеленга, при этом матрицу производной функции наблюдения выражают в виде  .
.
2. Устройство радиотехнического комплекса пассивной локации, реализующее способ по п. 1, состоящему из приемных постов с информационными датчиками станции радиотехнической разведки, способных измерять в азимутальной и угломестных плоскостях направление движения воздушного объекта с излучающими радиотехническими средствами и фиксировать момент прихода импульсов от излучающих средств при смене направления движения воздушного объекта, сканировать по частоте и определять местоположение воздушного объекта путем решения триангуляционной задачи, и оснащенных электронным блоком автосопровождения воздушных объектов в стробе размером  , , где D - задаваемое расстояние от пеленгатора в направлении азимута, блока пересчета измеренного азимута воздушного объекта в плоскостные координаты x, y, блока расчета ошибок экстраполяции и измерений и обратного пересчета плоскостных координат в азимут, блока составления матрицы производной функции наблюдения в виде
, , где D - задаваемое расстояние от пеленгатора в направлении азимута, блока пересчета измеренного азимута воздушного объекта в плоскостные координаты x, y, блока расчета ошибок экстраполяции и измерений и обратного пересчета плоскостных координат в азимут, блока составления матрицы производной функции наблюдения в виде  , блока вычисления Δβ экстраполированного и измеренного пеленгов (при - π<Δβ≤π), блока определения коэффициента усиления k, блока уточнения вектора состояния S(t) и алгоритмической ковариационной матрицы, а также блока оценки работы фильтра при сглаживании пеленга.
, блока вычисления Δβ экстраполированного и измеренного пеленгов (при - π<Δβ≤π), блока определения коэффициента усиления k, блока уточнения вектора состояния S(t) и алгоритмической ковариационной матрицы, а также блока оценки работы фильтра при сглаживании пеленга.
| ЧЕРНЯК В.С | |||
| и др | |||
| Многопозиционные радиолокационные станции и системы | |||
| "Зарубежная радиоэлектроника", 1987, N1, с.11, 15-17, 29-33, 42-54 | |||
| МОБИЛЬНЫЙ НАЗЕМНЫЙ СПЕЦИАЛЬНЫЙ КОМПЛЕКС ПРИЕМА И ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2010 |
|
RU2460136C2 |
| РАЗНЕСЕННАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ | 2008 |
|
RU2374596C1 |
| Устройство для передачи на расстояние показаний измерительных приборов | 1928 |
|
SU25077A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2009 |
|
RU2430385C2 |
| US 6650270 B1, 18.11.2003 | |||
| US 20100085243 A1, 08.04.2010 | |||
| Устройство для разделения проволоки | 1982 |
|
SU1087236A1 |

