Изобретение относится к области технологии и устройств для исследования рабочих процессов дорожных машин, преимущественно машин для содержания дорожных покрытий.
Известен способ имитации процесса уборки дорожного покрытия, содержащий перемещение рабочего органа относительно неподвижного контейнера, заполненного сыпучим материалом, с одновременным взаимодействием рабочего органа с материалом, например, резанием материала и регистрацией параметров, характеризующих процесс указанного взаимодействия [1]
Известна также конструкция стенда для осуществления данного способа, содержащего неподвижный контейнер с грунтом (грунтовый канал), подвижную тележку с закрепленным на ней посредством тензометрической подвески рабочим органом и приводную станцию [1]
Недостатками известных способа и устройства для его осуществления является значительная длина пути взаимодействия рабочего органа с материалом для исследования установившихся во времени режимов, особенно при высоких скоростях взаимодействия, причем большая длина пути дополнительно увеличивается вследствие неустановившегося разгона тележки в начале пути и ее торможения в конце пути, невозможность исследования процессов взаимодействия с материалом рабочих органов машин для содержания дорог, поскольку у этих рабочих органов взаимодействие с материалом сочетается с одновременным взаимодействием с твердым дорожным покрытием, что не обеспечивает грунтовый контейнер, невозможность исследования процессов разработки материала рабочими органами при криволинейном движении в горизонтальной плоскости.
Прототипом изобретения является способ имитации процесса уборки дорожного покрытия, содержащий прямолинейную непрерывную дозированную подачу сыпучего материала с постоянной во времени площадью поперечного сечения потока этого материала к неподвижному рабочему органу и регистрацию параметров, характеризующих процесс взаимодействия рабочего органа с материалом [2] Инверсирование взаимодействия рабочего органа с материалом при неподвижном рабочем органе и движущемся потоке материала полностью адекватно реальным рабочим процессам дорожных машин, рабочие органы которых перемещаются относительно неподвижного потока материала.
Прототипом устройства является стенд для исследования рабочих органов дорожных машин, содержащий ленточный транспортер с приводом, над одним концом которого неподвижно смонтирован на подвеске рабочий орган, а над другим концом неподвижно установлен снизу бункер с сыпучим материалом, снабженный со стороны рабочего органа питателем в виде вертикальной шиберной заслонки, расположенной поперек ленточного транспортера [2] Расположение сыпучего материала на поверхности ленточного транспортера по условиям наружного трения адекватно расположению такого материала на поверхности асфальтобетонного дорожного покрытия.
Недостатком (прототипа) способа и устройства для его осуществления является возможность исследования взаимодействия рабочих органов с материалом при криволинейном движении дорожной машины, характерном для рабочих процессов высокоманевренных машин с малым радиусом поворота, базирующихся на мотоблоках, малогабаритных тракторах, самоходных шасси с бортовым поворотом, транспортных средствах с шарнирно сочлененной рамой и т.п. В то же время криволинейное движение дорожной машины характеризуется неравномерным поступлением материала на рабочий орган по его ширине. Движущийся с максимальным радиусом внешний край любого рабочего органа взаимодействует в единицу времени с существенно большим количеством материала на единицу ширины захвата рабочего органа, чем его внутренний край, который перемещается с минимальным радиусом относительно центра поворота машины.
Преимущество изобретения состоит в возможности имитации процессов уборки дорожного покрытия на участках с криволинейной траекторией с различными радиусами поворота.
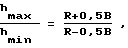
Для этого сыпучий материал прямолинейно подают к рабочему органу с дифференцированной по ширине поперечного сечения высотой потока, причем высоты поперечного сечения потока материала определяются соотношением:
где
hmax максимальная высота поперечного сечения потока материала,
hmin минимальная высота поперечного сечения 2 потока материала,
R радиус моделируемого криволинейного движения машины,
B ширина захвата материала рабочим органом.
Шиберная заслонка устройства для осуществления указанного способа выполнена с косым нижним краем, расположенным под углом относительно поверхности ленточного транспортера.
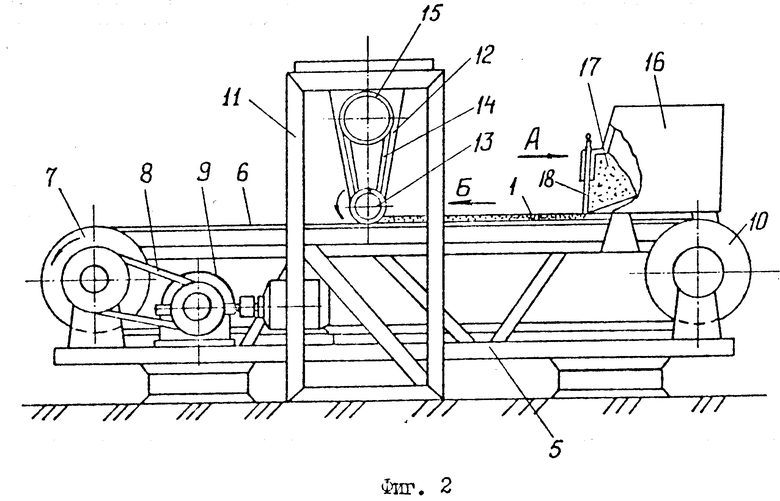
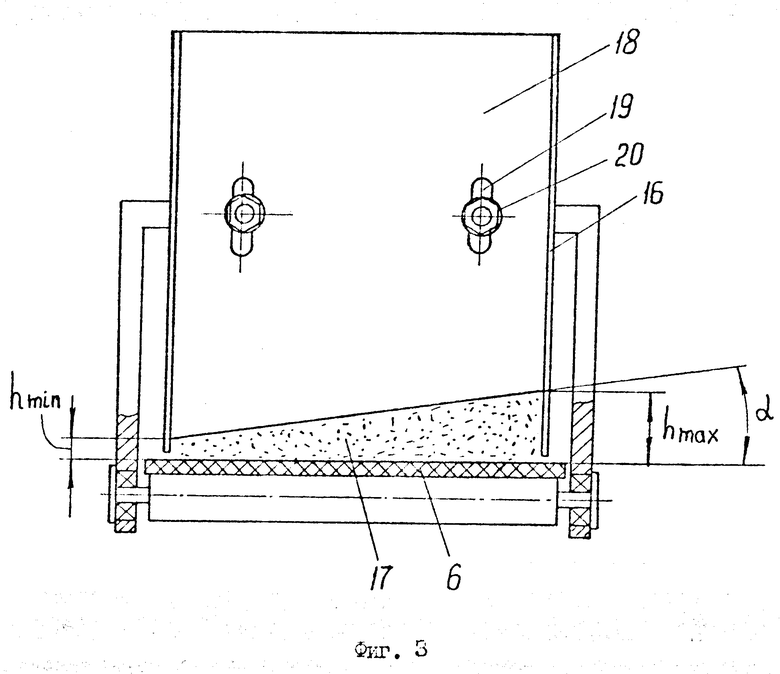
На фиг. 1 показана схема способа имитации процесса уборки дорожного покрытия уборочными машинами при моделировании их криволинейного движения; на фиг. 2 общий вид стенда для осуществления указанного способа; на фиг. 3 - вид со стороны рабочего органа на бункер с шиберной заслонкой по стрелке А на фиг. 2.
Способ осуществляется следующим образом.
Сыпучий материал непрерывно подают дозированным потоком с постоянной во времени площадью поперечного сечения 2 к неподвижному рабочему органу 3,
Высоту подаваемого к рабочему органу потока сыпучего материала дифференцированно изменяют в линейной зависимости по ширине его поперечного сечения 2 в соответствии с соотношением
где
hmax максимальная высота поперечного сечения потока материала, соответствующая максимальному удалению Rmax от центра O кривизны траектории моделируемого криволинейного движения машины,
hmin минимальная высота поперечного сечения 2 потока материала, соответствующая минимальному удалению Rmin от центра O кривизны траектории моделируемого криволинейного движения,
R радиус кривизны траектории моделируемого криволинейного движения машины,
R 0,5 (Rmax + Rmin)
B ширина захвата потока 1 материала рабочим органом,
B Rmax Rmin.
Скорость прямолинейной подачи потока 1 материала к рабочему органу 3 равна окружной скорости моделируемого криволинейного движения машины, v=ωR где ω - моделируемая угловая скорость движения машины с рабочим органом 3. При криволинейном движении рабочий орган 3 описывает в горизонтальной плоскости за счет перемещения на элементарный угол Φ площадь 4, захватывая на этой площади материал с постоянной высотой слоя относительно поверхности дороги, при эквивалентном процессе прямолинейного движения за то же время t=Φ/ω рабочий орган перерабатывает такой же объем материала, но перемещающийся линейно и дифференцированный по высоте площади поперечного сечения 2 потока вдоль ширины В рабочего органа. На элементарной ширине dB захвата рабочего органа 3, удаленной на максимальное расстояние Rmax от центра O кривизны траектории моделируемого криволинейного движения рабочий орган 3 перерабатывает количество материала за единицу времени, чем на такой же элементарной ширине захвата dB, удаленной на минимальное расстояние Rmin от центра O, причем соотношение указанных количеств материала, перерабатываемых по ширине dB на моделируемых радиусах Rmax и Rmin равно соотношению количеств материала, перерабатываемых по ширине dB при соответствующих высотах потока материала hmax и hmin в процессе прямолинейного движения потока материала.
Устройство для реализации способа имитации процесса уборки содержит (фиг. 2) смонтированный на раме 5 ленточный транспортер 6 с ведущим барабаном 7, который соединен клиноременной передачей 8 с приводной станцией 9, и натяжным барабаном 10. На дополнительной раме 11 смонтирован над транспортером 6 посредством подвески 12 рабочий орган 13, например, цилиндрическая подметальная щетка, соединенная клиноременной передачей 14 с приводным двигателем 15. У натяжного барабана 10 над транспортером 6 неподвижно смонтирован открытый снизу бункер 16 с сыпучим материалом 17. Бункер 16 снабжен со стороны рабочего органа 13 питателем в виде вертикальной шиберной заслонки 18, которая расположена поперек транспортера 6. Заслонка 18 смонтирована с возможностью вертикального перемещения относительно транспортера 6 (фиг. 3) при помощи вертикальных пазов 19 и фиксирующих гаек 20 и выполнена с косым нижним краем, расположенным под углом a относительно поверхности транспортера 6.
При движении транспортера 6 он подает сыпучий материал 17 из бункера 16 потоком 1 по стрелке Б к рабочему органу. Косой нижний край заслонки 18 обеспечивает трапециевидное сечение потока материала, причем угол a наклона нижнего края заслонки 18 определяет разность высот потока 1 материала hmax и hmin, соотношение которых, в свою очередь, определяет радиус R моделируемого на стенке криволинейного в плане движения дорожной машины с рабочим органом 13. Рабочий орган 13 разрабатывает поток 1 сыпучего материала. Одновременно измеряются силовые и энергетические характеристики рабочего процесса. Остаток потока 1 материала осыпается с конца транспортера 6, противоположного бункеру 16 и периодически перемещается назад в бункер вручную или при помощи вспомогательных механизмов. Изменение производительности рабочего органа 13 обеспечивается изменением скорости транспортера 6 или перемещением по высоте заслонки 18, изменение моделируемого радиуса R криволинейного движения установкой другой заслонки 18 с иным углом a наклона ее нижнего края относительно транспортера 6.
Источники информации:
1. В.И. Баловнев. Моделирование процессов взаимодействия со средой рабочих органов дорожно-строительных машин. М. Высшая школа, 1981 г. с.204, рис. V.4.
Авторское свидетельство СССР N 1057794/11, кл. G 01 M 19/00, 1982.
С. А. Варганов, П.И. Марков, Б.М. Шереметьев. Машины для укладки и уплотнения асфальтобетонной смеси. М. Высшая школа, 1979, с. 27, рис. 9.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ РАБОЧИХ ОРГАНОВ ДОРОЖНЫХ МАШИН | 1991 |
|
RU2022078C1 |
| Рабочее оборудование подметальноуборочной машины | 1990 |
|
SU1730332A1 |
| ПОДМЕТАЛЬНАЯ МАШИНА | 1991 |
|
RU2025554C1 |
| Рабочее оборудование подметально-уборочной машины | 1990 |
|
SU1721164A1 |
| СПОСОБ ИМИТАЦИИ ПРОЦЕССА ПОДМЕТАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2035539C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ РАБОЧИХ ОРГАНОВ ДОРОЖНЫХ МАШИН | 1991 |
|
RU2045755C1 |
| Питатель для сыпучих материалов | 1979 |
|
SU774950A1 |
| Гидропривод фрезерно-роторного снегоочистителя | 1988 |
|
SU1504300A1 |
| Устройство для подметания поверхностей | 1989 |
|
SU1677151A1 |
| Роторный снегоочиститель | 1988 |
|
SU1557240A1 |
Использование: изобретение относится к области технологии и устройств для исследования рабочих процессов дорожных машин. Сущность изобретения: способ имитации процесса уборки дорожного покрытия заключается в прямолинейной непрерывной дозированной подаче сыпучего материала с постоянной площадью поперечного сечения потока 1 этого материала к неподвижному рабочему органу и регистрацию параметров, характеризующих процесс взаимодействия рабочего органа с материалом. Устройство для осуществления способа содержит ленточный транспортер 6 с приводом, над одним концом которого неподвижно смонтирован на подвеске 12 рабочий орган 13, а над другим концом неподвижно установлен открытый снизу бункер 16 с сыпучим материалом 17, снабженный со стороны рабочего органа 13 питателем в виде вертикальной шиберной заслонки 18, расположенной поперек ленточного транспортера. Нижний край заслонки 18 скошен, он расположен под углом относительно поверхности ленточного транспортера 6, что обеспечивает дифференцированную по ширине поперечного сечения высоту потока 1, подаваемого к рабочему органу, причем высоты поперечного сечения потока материала определяются соотношением: hmax/hmin=R+0,5B/R-0,5B, где hmax - максимальная высота поперечного сечения 2 потока 1 материала; hmin - минимальная высота поперечного сечения 2 потока 1 материала, R - радиус моделируемого криволинейного движения машины, B - ширина захвата материала рабочим органом 13. 2 с.п. ф-лы, 3 ил.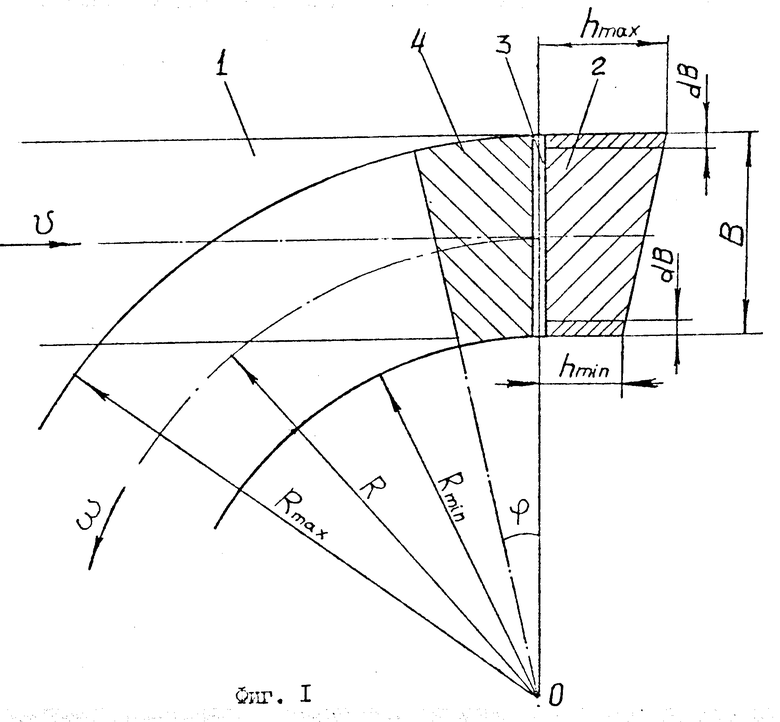
где hmax максимальная высота поперечного сечения потока материала;
hmin минимальная высота поперечного сечения потока материала;
R радиус моделируемого криволинейного движения машины;
B ширина захвата материала рабочим органом.
| Стенд для исследования моделей рабочих органов дорожных машин | 1982 |
|
SU1057794A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
