Изобретение относится к судоподъемным и аварийно-спасательным работам на морских и внутренних водоемах.
Существуют способы подъема затонувших объектов с помощью подъемно-транспортных устройств с балластными цистернами. Например, известен “Способ подъема затонувших судов из больших глубин” по заявке РФ № 93018262/11 публикация 1995, МПК В 63 С 7/08. Корпус поднимаемого судна охватывают жестким каркасом, а к раме каркаса крепят герметичные понтоны, которые спускают при помощи специального контейнера-носителя, заполняемого балластом из сыпучего материала.
Известен “Способ выполнения подводных подъемно-транспортных операций” по патенту РФ № 2099237, публикация 20.12.97, МПК В 63 С 7/08, который выбран в качестве ближайшего аналога. Способ включает захват затонувшего объекта устройством для проведения подъемно-транспортных операций, выведение объекта из соприкосновения с грунтом, уравновешивание путем балластировки понтона упомянутого устройства силами и моментами, действующими на устройство, и затем подъем объекта.
Несмотря на то, что известны способы проведения подводных подъемно-транспортных операций, подъем объектов из-под воды является сложной и далеко не полностью решенной задачей.
Известны устройства ориентации подъемно-транспортных устройств относительно подводных объектов. Большинство из них осуществляют ориентацию устройства с помощью неконтактных средств. Однако на конечном этапе ориентации подъемно-транспортного устройства относительно поднимаемого объекта необходимо точно сцентрировать устройство у поднимаемого объекта, чтобы повысить надежность подъема последнего. Простые по конструкции механические устройства центрирования подъемно-транспортного устройства относительно поднимаемого объекта нам не известны.
При подъеме объектов важно надежно захватить и зафиксировать поднимаемый объект. Известны многочисленные конструкции устройств для захвата затонувших объектов. Например, “Устройство для захвата затонувшего объекта”, а.с. СССР № 1636298, приоритет 18.09.87, МПК В 63 С 7/02; “Устройство для захвата затонувших грузов”, патент РФ № 2013343, приоритет 18.04.91, МПК В 63 С 1/00; “Захватное устройство для подъема затонувших объектов”, заявка РФ № 92004736, приоритет 26.10.92, МПК В 63 С 7/20. Последнее устройство выбрано в качестве ближайшего аналога. Оно содержит опорную раму, в направляющей которой на ползуне установлены рычажные захваты.
Рассмотренные захватные устройства не обеспечивают надежную фиксацию протяженных крупногабаритных объектов.
Предлагаемое изобретение в части способа направлено на решение технической задачи, связанной с повышением надежности ориентирования подъемного устройства над поднимаемым объектом, захвата объекта и как следствие повышение надежности подъема и упрощение выполнения подъемно-транспортных операций.
В заявляемом способе выполнения подводных подъемно-транспортных операций подъемно-транспортное устройство П-образной формы, содержащее горизонтальную и вертикальные секции, позиционируют под водой в вертикальной и горизонтальной плоскостях над поднимаемым объектом. Далее его опускают на поднимаемый объект, размещая между вертикальными секциями. При этом осуществляется центрирование подъемно-транспортного устройства относительно поднимаемого объекта за счет его перемещения при установлении динамического контакта с поднимаемым объектом демпфирующих устройств, которые установлены на подъемно-транспортном устройстве. После окончания процесса центрирования в горизонтальной плоскости опускают подъемно-транспортное устройство до контакта верхней секции П-образного подъемно-транспортного устройства с поднимаемым объектом. Затем захватывают поднимаемый объект путем одновременного попарного выдвижения навстречу друг другу ряда опорных устройств из нижней части каждой вертикальной секции до контакта с нижней частью поднимаемого объекта. После этого поднимают подъемно-транспортное устройство с поднимаемым объектом над грунтом и буксируют поднимаемый объект полностью или частично под водой.
Такая последовательность выполнения способа позволяет осуществить безопасный подъем объекта в минимальное время. Малое время установки подъемно-транспортного устройства обеспечивается совокупностью операций размещения объекта между вертикальными секциями и автоматического центрирования его относительно поднимаемого объекта за счет простых механических устройств. При этом не требуется проводить какие-либо ручные операции из дополнительных подводных аппаратов или водолазами. Надежность подъема и дальнейшей транспортировки обеспечивается операциями захвата, при выполнении которых осуществляется прижим поднимаемого объекта к верхней части П-образного подъемно-транспортного устройства.
В частном случае выполнения способа производят позиционирование подъемно-транспортного устройства, имеющего близкую к нулевой плавучесть, в вертикальной плоскости относительно поднимаемого объекта созданием динамического равновесия вертикальных сил от управляемых работающих устройств вертикальной тяги, а также нагнетания воды в прочные герметичные объемы и/или принудительного сброса воды из них. Такое позиционирование позволяет быстрее выровнять подъемное устройство относительно поднимаемого объекта.
Кроме того, демпфирование осуществляют путем перемещения демпфирующих устройств подъемно-транспортного устройства при динамическом контакте с поднимаемым объектом с приложением к подъемно-транспортному устройству возрастающего по мере его перемещения сопротивления. Возрастающая сила сопротивления позволяет избежать динамических ударов подъемного устройства о поднимаемый объект, обеспечивая при этом центрирование объекта между вертикальными секциями подъемно-транспортного устройства.
Центрирование подъемно-транспортного устройства относительно поднимаемого объекта осуществляют одновременно с опусканием его на поднимаемый объект.
Для снижения сопротивления грунта, а также для образования надежной самоцентрирующей опоры опорные устройства выдвигают в наклонных к горизонтальной плоскостях и пересекающихся в диаметральной плоскости подъемно-транспортного устройства.
Технический результат для заявляемого устройства центрирования такой же, как и для осуществления одного из действий способа.
Устройство центрирования подъемно-транспортного устройства содержит демпфирующие устройства, причем каждое из демпфирующих устройств содержит механизм, обеспечивающий перемещение привальных рычагов демпфирующего устройства от подъемно-транспортного устройства, когда контакта с поднимаемым объектом нет, и перемещение к подъемно-транспортному устройству с возрастающим по мере перемещения сопротивлением при возникновении динамического контакта с поднимаемым объектом.
Благодаря такому выполнению устройства обеспечивается быстрое автоматическое центрирование подъемно-транспортного устройства относительно поднимаемого объекта.
В частном случае механизм, обеспечивающий перемещение привальной части демпфирующего устройства, может быть выполнен в виде пружинного устройства.
В другом частном случае механизм, обеспечивающий перемещение привальной части демпфирующего устройства, может быть выполнен в виде пантографа.
Устройство захвата затонувших объектов П-образного подъемно-транспортного устройства содержит горизонтальную и вертикальные секции. Устройство также включает ряд опорных консолей, укрепленных попарно с двух сторон на нижних частях вертикальных секций и установленных в направляющих с возможностью выдвижения внутрь П-образного подъемно-транспортного устройства.
В частном случае опорные консоли установлены с возможностью выдвижения в плоскостях, расположенных под углом α=50-80° к диаметральной плоскости подъемно-транспортного устройства.
Кроме того, торцы опорных консолей в выдвинутом положении образуют опорную призму для поднимаемого объекта.
Помимо этого, на вводимых под поднимаемый объект кромках опорных консолей выполнены форсунки для подачи воды под давлением для размыва грунта.
Изобретение поясняется чертежами.
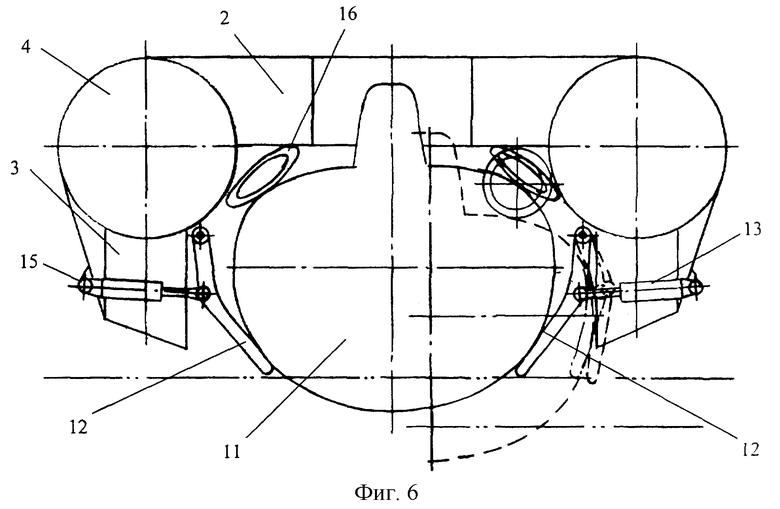
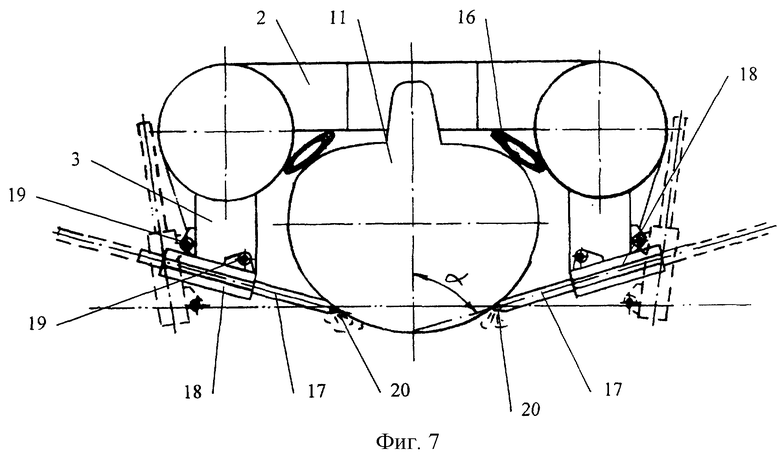
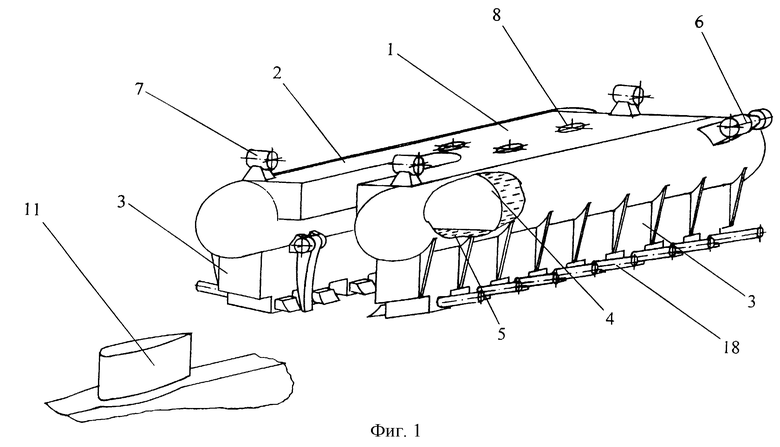
На Фиг.1 показан общий вид подъемно-транспортного устройства. На Фиг.2-5 - последовательность операций выполнения подводных подъемно-транспортных операций. На Фиг.6 - пример выполнения устройства центрирования. На Фиг.7 - конструкция устройства захвата.
Способ выполнения подводных подъемно-транспортных операций выполняется с помощью П-образного подъемно-транспортного устройства 1 (фиг.1), которое может передвигаться в надводном и подводном положениях и содержит горизонтальную секцию 2 и вертикальные секции 3, балластные цистерны 4, дифферентовочную систему 5, двигательно-движительный комплекс 6, подруливающие устройства 7, устройства вертикальной тяги 8. Подъемно-транспортное устройство 1 содержит также устройство центрирования и устройство захвата. На фиг.1 показан также поднимаемый объект 11, подводная лодка.
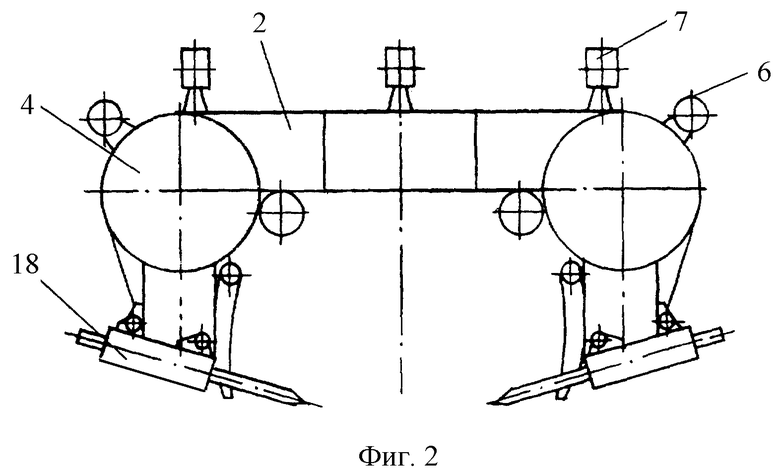
Подъемно-транспортное устройство 1 в походном положении под водой показано на фиг.2, при этом устройства захвата вдвинуты между вертикальными секциями 3.
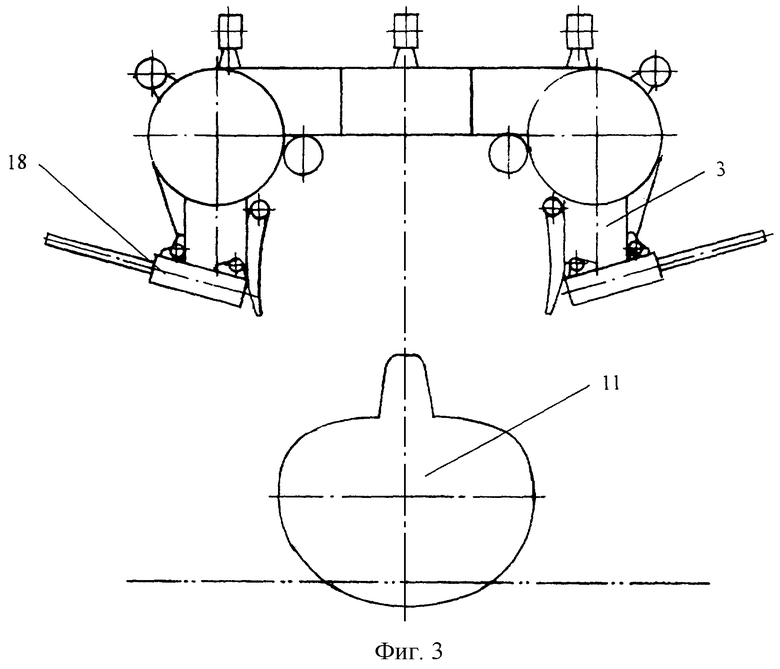
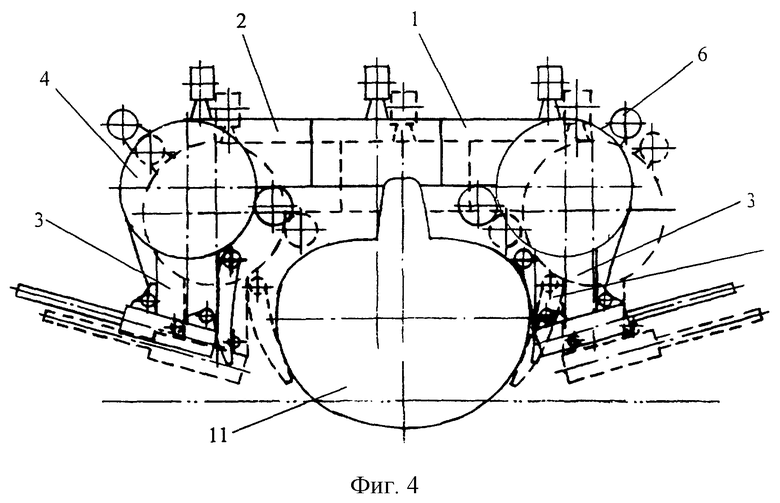
Сначала подъемно-транспортное устройство 1 позиционируют под водой в вертикальной и горизонтальной плоскостях над поднимаемым объектом 11 (фиг.3) с помощью балластных цистерн 4, дифферентовочной системы 5, двигательно-движительного комплекса 6, подруливающих устройств 7, устройств вертикальной тяги 8. Далее подъемно-транспортное устройство 1 опускают на поднимаемый объект 11, размещая его между вертикальными секциями 3 и осуществляя центрирование его относительно поднимаемого объекта 11 (фиг.4). Центрирование происходит за счет смещения подъемно-транспортного устройства 1 в горизонтальной плоскости с одновременным вертикальным перемещением с помощью устройства центрирования. При установлении динамического контакта с поднимаемым объектом устройства центрирования как бы “обжимают” поднимаемый объект 11 и тем самым заставляют устанавливаться подъемно-транспортное устройство точно над поднимаемым объектом, одновременно “поджимая” устройство к объекту.
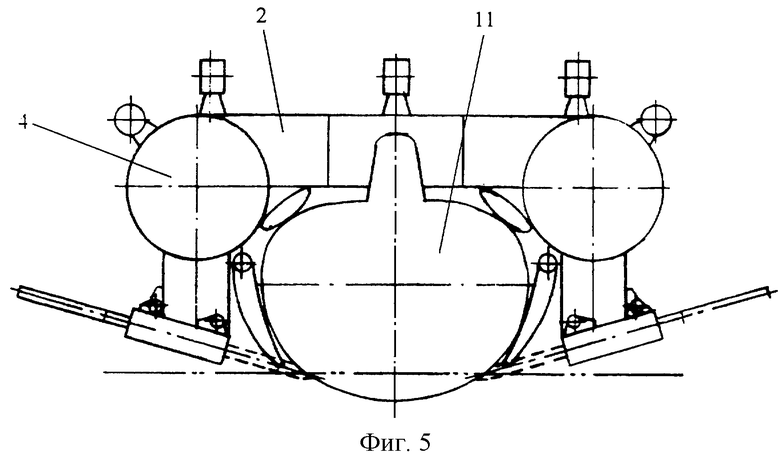
Затем после окончания процесса центрирования в горизонтальной плоскости подъемно-транспортное устройство 1 опускают до контакта верхней секции 2 устройства с поднимаемым объектом 11 (фиг.5).
После этого захватывают поднимаемый объект путем одновременного попарного выдвижения навстречу друг другу ряда опорных устройств устройства захвата из нижней части каждой вертикальной секции 3 до контакта с нижней частью поднимаемого объекта 11. После установления надежного захвата поднимают подъемно-транспортное устройство 1 с поднимаемым объектом 11 над грунтом путем продувки балластных цистерн 4, уравновешивают путем балластировки дифферентовочной системы 5 и буксируют поднимаемый объект 11, находящийся между вертикальными секциями 3 подъемно-транспортного устройства, под водой или в надводном положении.
Устройство центрирования подъемно-транспортного устройства 1 одновременно выполняет функции демпфирования и содержит закрепленные на вертикальных секциях 3 посредством осей 15 привальные рычаги 12 и гидроцилиндры 13 со штоками 14. Для того чтобы в процессе центрирования не повредить подъемно-транспортное устройство 1 и поднимаемый объект 11 целесообразно в верхней части, в месте крепления вертикальных секций 3 к горизонтальной секции 2 предусмотреть дополнительные демпферы-кранцы 16.
Гидроцилиндры 13 обеспечивают выставку из походного положения привальных рычагов 12 от подъемно-транспортного устройства 1, когда контакта с поднимаемым объектом 11 нет, и перемещение рычагов 12 к подъемно-транспортному устройству 1 с возрастающим по мере перемещения сопротивлением при возникновении динамического контакта с поднимаемым объектом 11, например, за счет не показанных на чертежах пневмогидроаккумуляторов.
В другом варианте выполнения механизм, обеспечивающий перемещение привальных рычагов устройства центрирования, может быть выполнен в виде пружинного устройства. Механизм, обеспечивающий перемещение привальных рычагов устройства центрирования, может быть выполнен также в виде пантографа.
Устройство центрирования работает следующим образом. В исходном положении в гидроцилиндры 13 подается давление и привальные рычаги 12 одновременно попарно с двух сторон “сходятся” к поднимаемому объекту 11. При контакте привальных поверхностей того или иного рычага 12 с поднимаемым объектом из-за динамического столкновения рычаг отводится к вертикальной секции 3, и затем все подъемно-транспортное устройство, находящееся в воде в подвешенном состоянии, смещается в другую сторону. Тогда происходит динамическое столкновение с рычагами противоположной вертикальной секции 3, жидкость в гидроцилиндрах 13 перетекает и удар смягчается. Через некоторое время подъемно-транспортное устройство 1 автоматически центрируется относительно поднимаемого объекта 11.
Устройство захвата П-образного подъемно-транспортного устройства 1 (фиг.7) включает ряд опорных консолей 17, укрепленных попарно с двух сторон на нижних частях вертикальных секций 3 и установленных в направляющих 18 с возможностью выдвижения внутрь П-образного подъемно-транспортного устройства 1.
Опорные консоли 17 целесообразно выдвигать в плоскостях, расположенных под углом α=50-80° к диаметральной плоскости подъемно-транспортного устройства. В этом случае обеспечивается надежный захват поднимаемого объекта, при этом опорные консоли при выдвижении не испытывают излишнего сопротивления грунта. Для того чтобы еще снизить это сопротивление, на вводимых под поднимаемый объект кромках опорных консолей 17 выполнены форсунки 20 для подачи воды под давлением для размыва грунта.
Торцы опорных консолей 17 в выдвинутом положении образуют опорную призму для поднимаемого объекта.
Опорные консоли 17 могут крепиться на шарнирах 19 и в походном положении подъемно-транспортного устройства 1 не мешают его движению.
Устройство захвата работает следующим образом. После окончания центрирования и опускания подъемно-транспортного устройства 1 на поднимаемый объект 11 начинают по направляющим 18 выдвигаться опорные консоли 17 с помощью приводов (на чертежах не показаны). Для того чтобы преодолеть сопротивление грунта (ила), в который может погрузиться поднимаемый объект, через форсунки 20 подается вода для размыва. После окончания выдвижения опорных консолей 17 поднимаемый объект 11 надежно фиксируется и все подъемно-транспортное устройство 1 готово к подъему.
Предлагаемое изобретение позволяет повысить скорость, надежность подъема и транспортировки поднимаемых затонувших и иных подводных объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫПОЛНЕНИЯ ПОДВОДНЫХ ПОДЪЕМНО-ТРАНСПОРТНЫХ ОПЕРАЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2388648C1 |
| Захватное устройство для заиленных подводных объектов и способ его использования при осуществлении подъема | 2016 |
|
RU2630040C1 |
| Способ выполнения подводных подъемно-транспортных операций и устройство для его осуществления | 2015 |
|
RU2619882C2 |
| Судоподъемный комплекс, твердотопливный газогенератор и способ судоподъема | 2018 |
|
RU2700431C1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА И ПОДЪЁМА ЗАИЛЕННЫХ ПОДВОДНЫХ ОБЪЕКТОВ | 2019 |
|
RU2709057C1 |
| СИСТЕМА ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ СУДОВ | 2011 |
|
RU2518683C2 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2016 |
|
RU2613181C1 |
| Судно для подъема затонувших объектов | 1981 |
|
SU1063705A1 |
| Устройство Ю.Н.Кунгурцева для подъема затонувшего объекта из донного грунта | 1990 |
|
SU1710436A1 |
| СУДОПОДЪЕМНИК-СПАСАТЕЛЬ | 2003 |
|
RU2261819C2 |
Группа изобретений относится к способам проведения судоподъемных работ, а также к конструкции устройств центрирования и захвата затонувшего объекта П-образного подъемно-транспортного устройства (ПТУ), имеющего вертикальные и горизонтальную секции. Способ заключается в позиционировании ПТУ под водой в вертикальной и горизонтальной плоскостях над поднимаемым объектом, опускании на последний с размещением его между вертикальными секциями ПТУ, центрировании относительно поднимаемого объекта ПТУ путем его перемещения установленными на вертикальных секциях привальными рычагами устройства центрирования после выдвижения их гидроцилиндрами навстречу друг другу до установления динамического контакта с поднимаемым объектом. Затем ПТУ опускают до контакта его горизонтальной секции с поднимаемым объектом и захватывают последний путем одновременного попарного выдвижения навстречу друг другу до контакта с нижней частью этого объекта опорных консолей устройства захвата, расположенных в нижней части каждой вертикальной секции. После этого поднимают с поднимаемым объектом над грунтом и буксируют последний полностью или частично под водой. Такое выполнение обеспечивает повышение надежности ориентирования ПТУ над поднимаемым объектом, захвата и подъема последнего, а также упрощает выполнения подъемно-транспортных операций. 3 с. и 3 з.п. ф-лы, 7 ил.
| US 3541986 А, 24.11.1970.US 1899059 A, 28.02.1933.SU 1804408 A3, 23.03.1993.SU 1826953 A3, 07.07.1993. |

