Изобретение относится к комбинированным летательным аппаратам, использующим аэростатическую подъемную силу несущего газа и силу тяги силовых установок и используемых для транспортировки грузов.
Известен способ воздушной транспортировки, заключающейся в зависании летательного аппарата над грузом, захвате груза, сбросе балласта и дальнейшей транспортировке груза.
Способ реализуется системой воздушной транспортировки, содержащей летательный аппарат балластного типа, состоящий из двух куполообразных оболочек с несущим газом, соединенных между собой жестким периферийных кольцом и центральной стойкой, и средства захвата груза и сброса балласта.
Известная транспортная система и способ обеспечения воздушной транспортировки имеет ряд существенных недостатков, а именно: летно-технические характеристики таких Ла не обеспечивают работу при ветре больше трех-пяти м/с, не обеспечивают автономность проведения прецизионных погрузочно-разгрузочных, монтажных и спасательных операций, особенно при наличии атмосферной турбулентности и при нормированных порывах ветра. Пассивное зачаливание ЛА при порывах ветра не обеспечивает совпадения его центра масс (ц.м.) и ц.м. лежащего на земле груза, что исключает возможность захвата массивных грузов. Как следствие, не обеспечивает прецизионное вертикальное движения ЛА, необходимое для захвата и подъема груза. И, наконец, вертикальное движение ЛА при расчаливании не контролируется, может возникнуть перекос при неодновременном расчаливании фалов, приводящий к повреждению груза.
В части конструктивных недостатков следует отметить, что периферийное кольцо, радиальные стержни, центральная стойка имеют вид жесткой ферменной конструкции с каркасными перегородками, подверженными температурным деформациям от солнца. В системе управления не предусмотрена аппаратура (блоки системы управления) для обеспечения автоматической зацепки и расцепки грузов, кроме того, не предусмотрены устройства для обеспечения сброса и забора газообразного балласта (например, воздуха) при посадке и взлете ЛА для управления вертикальной подъемной силой в необходимых пределах, составляющих до 200% от веса принимаемого груза.
Технический результат, получаемый при осуществлении изобретения, заключается в улучшении летно-технических и эксплуатационных характеристик, обеспечение автономности проведения прецизионных погрузочно-разгрузочных, монтажных и транспортных операций.
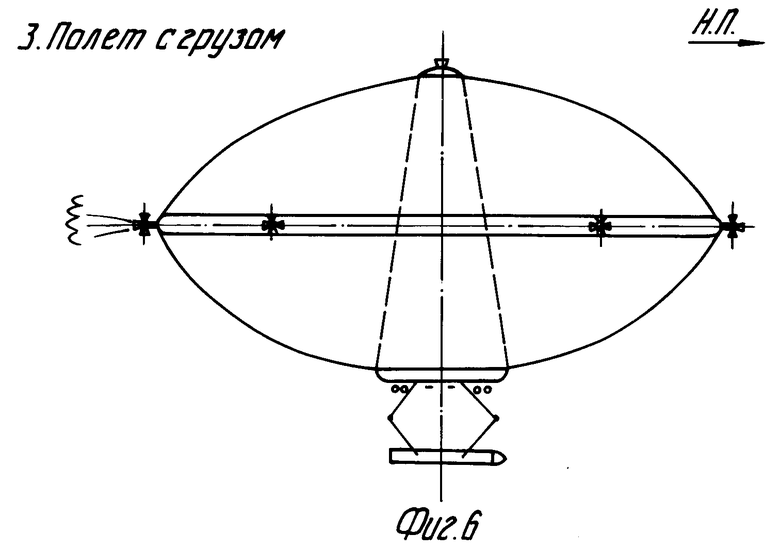
Указанный технический результат достигается тем, что в системе воздушной транспортировки, содержащей летательный аппарат оболочек с несущим газом, соединенных между собой жестким периферийным кольцом и центральной стойкой, и средства захвата груза и сброса балласта, центральная стойка заполнена газообразным балластом, а на ее основании закреплена сменная платформа с датчика прицеливания и контроля положения центра масс летательного аппарата, с блоком системы управления посредственным положением летательного аппарата, а также соплами сброса газообразного балласта.
Центральная стойка может быть выполнена герметичной, эластичной, секционированной в виде усеченного конуса, внутри которого размещены баллонеты с газообразным балластом.
Периферийное кольцо может быть выполнено в виде полого тора, соединенного со средней частью конической стойки полыми радиальными спицами.
Кроме этого оба основания усеченного конуса соединены с периферийным кольцом расчалками, которые выполнены в виде тросов с устройствами регулирования натяжения их длины и с дистанционным управлением.
Сменная платформа может быть выполнена в виде грузового модуля, причем в грузовом варианте она оснащена пантографами с грузозахватными устройствами и исполнительными органами для компенсации перемещения платформы при воздействии атмосферной турбулентности в автоматическом режиме по командам, поступающим от блока системы управления.
Наиболее удаленный от груза купол летательного аппарата может иметь кривизну не менее, чем на 10% большую, чем нижний.
Указанный технический результат достигается тем, что в способе воздушной транспортировки, заключающемся в зависании летательного аппарата над грузом, захвате груза, сбросе балласта и дальнейшей транспортировке груза, после зависания летательного аппарата над грузом определяют положение центра масс летательного аппарата и груза и сравнивают с допустимыми значениями отклонений центра масс летательного аппарата и груза, перемещают центр масс летательного аппарата до совмещения с осью, проходящей через центр масс груза, снижают летательный аппарат на допустимую высоту захвата, производят захват груза, сообщают летательному аппарату вертикальное усиление за счет стравливания газообразного балласта.
Кроме того для захвата груза при неблагоприятных погодных условиях сбрасывают рабочий газ и газообразный балласт, затем осуществляют складывание центральной стойки и куполообразных оболочек.
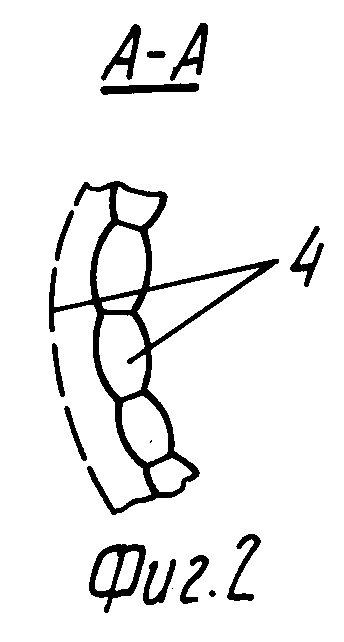
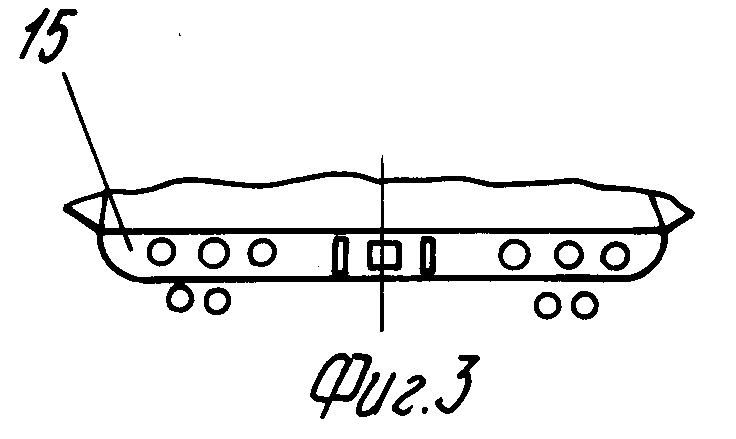
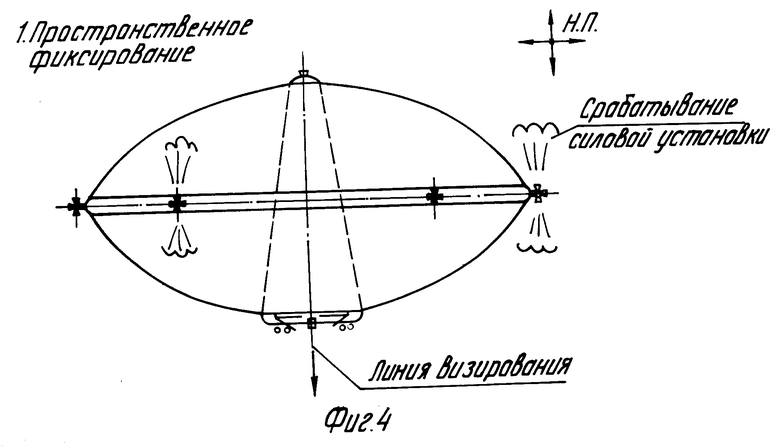
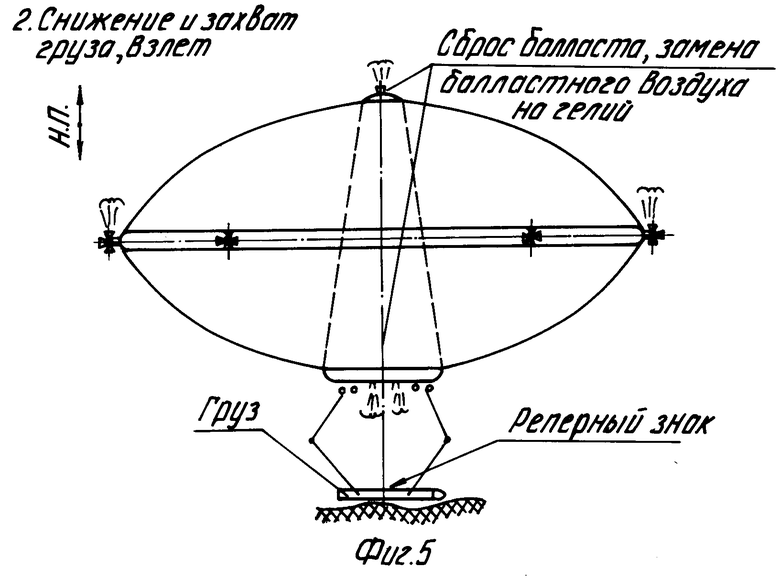
На фиг. 1 показана система воздушной транспортировки, на фиг. 2 разрез А-А фиг. 1; на фиг. 3 сменный модуль на фиг. 4 7 схема функционирования системы; на фиг. 4 пространственное фиксирование; фиг. 5 снижение и захват груза, взлет; на фиг. 6 полет с грузом; на фиг. 7 снижение и опускание груза, расцепка.
Система состоит из двух куполообразных оболочек 1, 2 с размещенными внутри них баллонетами 3 с несущим газом. Внутри ЛА находится эластичная центральная стойка 4 в виде усеченного конуса, с размещенными внутри нее баллонетами 5 с воздушным балластом. На периферийном кольце 6 размещены агрегаты 7 силовой установки.
Периферийное кольцо 6 соединено со средней частью усеченного конуса радиальными полыми стержнями 8. Верхнее и нижнее основание усеченного конуса соединены с периферийным кольцом 6 тросовыми расчалками с механизмами дистанционного регулирования их натяжения (длины) 9.
Грузовая платформа 10 в виде сменного модуля, крепится к нижнему основанию усеченного конуса.
На грузовой платформе 10 расположены захватные устройства 11 виде манипуляторов, блоки 12 системы управления, а также датчики 13 прицеливания и контроля положения ц.м.
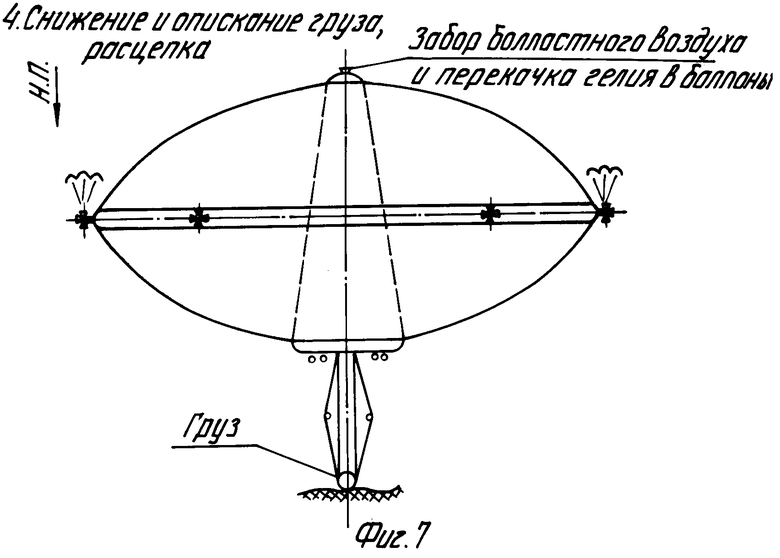
На верхнем и нижнем основании усеченного конуса закреплена сопла сброса газообразного балласта 14.
К нижнему основанию усеченного конуса могут закрепляться, например, сменный модуль в виде монтажного, либо пассажирского 15.
Функционирование системы транспортировки осуществляется следующим образом: ЛА зависает над грузом 4 и фиксируется (удерживается) с помощью тяговых импульсов агрегатов силовой установки 7, прицеливается датчиками положения ц. м. 14 ЛА и контролируется относительно ЦМ груза по вертикальной оси фиг. 5. В районе Ц.м. груза имеется сигнализатор либо реперный знак фиг. 5, сигналы которых воспринимаются приемными устройствами ЛА и обрабатываются в блоках системы управления 12.
После обработки сигналов датчиковой аппаратуры блок управления 12 ЛА выдает команды на исполнительные органы силовой установки 7 ЛА снижается автоматически на допустимую высоту, определяемую характером груза и состоянием земной поверхности (отсутствие пыльных потоков при работе ЛА и др.), и захватывает груз. При снижении ЛА с грузом часть воздушного балласта может сбрасываться через верхние сопла сброса 14, создавая отрицательную вертикальную силу, а при подъеме ЛА с грузом, наоборот, часть газообразного балласта может сбрасываться через нижние сопла сброса 14, создавая положительную вертикальную подъемную силу. В зависимости от массы груза подъемная сила ЛА может регулироваться путем заполнения (или сбросом) балластных емкостей жидкостью и рабочим газом, поступающим из бортовых баллонов высокого давления.
После взлета ЛА его полет осуществляется до места доставки груза фиг. 6. Операция по разгрузке груза производится в обратном порядке его погрузки с забором балласта (груза или воздуха из атмосферы) фиг. 7.
Изобретение относится к комбинированным летательным аппаратам, использующим аэростатическую подъемную силу несущего газа и силу тяговых силовых установок и используемых для транспортировки грузов. Технический результат, достигаемый при осуществлении изобретения, заключается в улучшении летно-технических и эксплуатационных характеристик, обеспечение автономности проведения прецизионных погрузочно-разгрузочных, монтажных и транспортных операций. Способ воздушной транспортировки заключается в том, что летательный аппарат зависает над грузом, захватывает груз, сбрасывает балласт и транспортирует груз. После зависания летательного аппарата над грузом определяют положение центра масс летательного аппарата и груза и сравнивают с достижимыми значениями отклонений центра масс летательного аппарата и груза, перемещают центр масс летательного аппарата до совмещения с осью, проходящей через центр масс груза, снижают летательный аппарат, производят захват груза, обобщают летательному аппарату вертикальное усиление за счет стравливания газообразного балласта. Способ реализуется системой воздушной транспортировки, содержащей летательный аппарат балластного типа, состоящий из двух куполообразных оболочек 1, 2 с несущим газом, соединенных жестким периферийным кольцом 6 и центральной стойкой 4, заполненной газообразным балластом. На основании центральной стойки 4 закреплена сменная платформа 10 с датчиком 13 прицеливания и контроля положения центра масс летательного аппарата, блоком 12 системы управления и сопла 14 сброса газообразного балласта. 2 с.и. 6 з.п. ф-лы, 7 ил.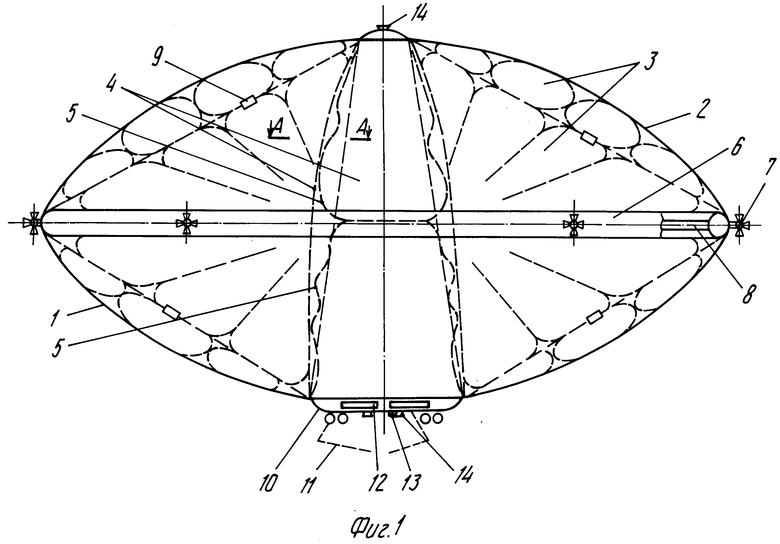
| Арие М.Я | |||
| Дирижабли | |||
| - Киев: Наукова Думка, 1986, с | |||
| Счетный сектор | 1919 |
|
SU107A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
