Изобретение относится к легкому самолетостроению и, в первую очередь, может быть использовано в летательных аппаратах, приводимых в действие мускульной силой человека.
Известен летательный аппарат, приводимый в действие мускульной силой человека, в котором подвод энергии обеспечивается движением плечевой части рук [1]
Известно устройство для полета на короткое расстояние с использованием мускульной силы, в котором несущая конструкция содержит два многолопастных и с венцом воздушных винта, вращающихся встречно и имеющих опору в корпусе. Каждый винт связан с резиновым жгутом. Второй нижний конец жгута закреплен на обеих сторонах с осью педали, так что благодаря нажиму на педали аккумулируется мускульная энергия, которая после срабатывания блокирующего приспособления передается на винт, так что устройство поднимается с пользователем наподобие вертолета [2]
Недостатком известных конструкций является то, что в них не используются одновременно усилия рук и ног (загружаются только руки или ноги), собственного веса и импульса движения.
Наиболее близким техническим решением к предлагаемому изобретению, взятым в качестве прототипа, является вертолет, приводимый мускульной силой человека, в котором несущие винты летательного аппарата, расположенные соосно, вращаются в противоположных направлениях. Мускульная энергия рук и ног используется для вращения несущих винтов. Энергия рук и ног человека передается и распределяется на несущие винты механическим устройством, содержащим только один передаточный ремень, при помощи шкивов и передаточного устройства [3]
Недостатками известной конструкции являются: исключение собственного веса пилота из процесса движения ввиду его сидячего рабочего положения; работа мышц рук и ног направлена не вдоль оси симметрии пилота, что снижает эффективность их работы; отсутствует импульс движения (часть свободного хода педалей).
Заявляемое изобретение направлено на устранение вышеотмеченных недостатков известного, и от его использования может быть получен следующий результат: наиболее эффективное использование мышц рук и ног за счет вертикального расположения пилота; увеличение мощности за счет использования в работе собственного веса пилота; повышение усилия воздействия на педали посредством использования импульса движения (заранее предусмотренное использование части свободного хода педалей), что увеличивает усилие воздействия на педали.
Указанный технический результат достигается за счет того, что предлагаемый мускулолет содержит движитель, несущие элементы которого представляют собой крылья, расширяющиеся к периферии и расположенные радиально в двух уровнях, образуя два соосно расположенных ротора, вращающихся во взаимно противоположных направлениях, на периферии которых установлен маховик в виде металлического обода. Передаточное устройство состоит из электродвигателя, на который передается энергия от электрогенератора, на обеих сторонах которого закреплены педали, так что благодаря воздействию на них руками и ногами пилота аккумулируется мускульная энергия, которая после срабатывания передаточного устройства передается на крылья, так что устройство поднимается с пилотом.
В основе предлагаемого устройства не лежит ни одна из известных искусственных или природных моделей летающих аппаратов и объектов (самолет, вертолет, махолет), так как они полностью не соответствуют физическим возможностям и природе человека. Необходима принципиально новая модель. Вот эта модель.
1. Двигатель
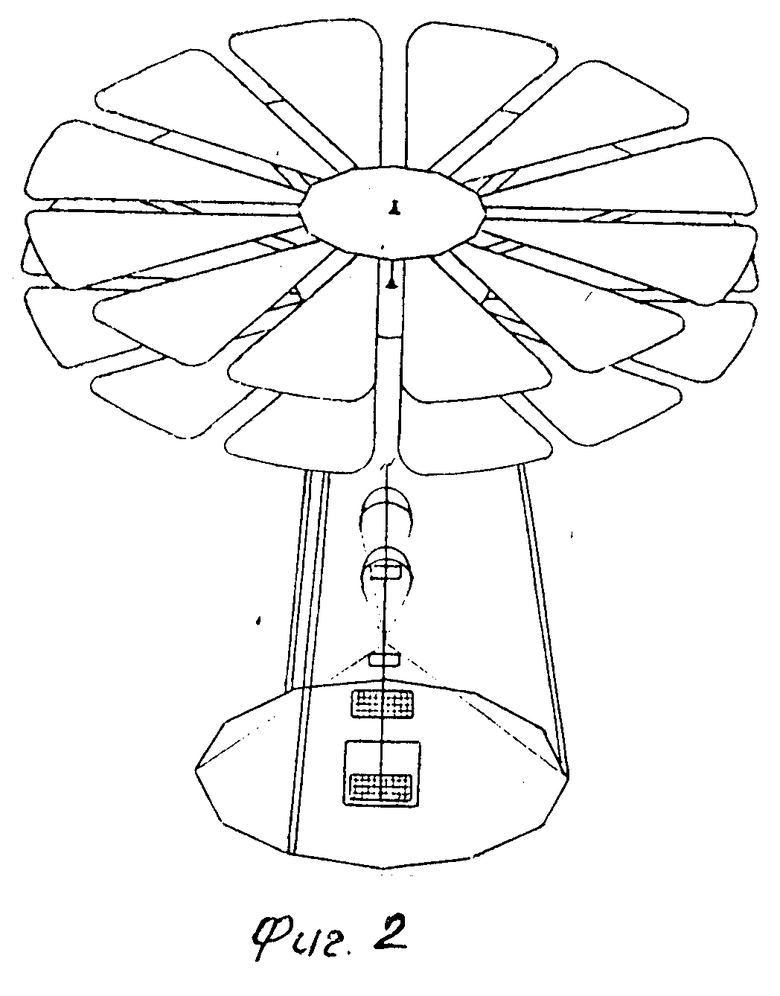
Двигатель состоит из педалей, на которые пилот воздействуют верхними и нижними конечностями, и строп, которыми он через плечи и/или пояс шарнирно связан с базой аппарата по центру. Педали смонтированы на передаточном механизме, который, в свою очередь, шарнирно связан с базой аппарата в центре ее. Шарнирные соединения позволяют пилоту при работе отклоняться вправо-влево. Педали совершают возвратно-поступательное движение по вертикали и близкому к ней направлению. Шарнирное крепление стопы ног к педалям позволяет совершать рабочий ход при движении конечностей как вниз, так и вверх. Из всего пути педалей от верхней точки до нижней, и наоборот, часть его (от 1/3 до 1/2) составляет свободный ход, что позволяет к моменту зацепления с механизмом передачи достичь значительного импульса движения.
На фиг. 1, где Pp усилие мышц рук; Pн- усилие мышц ног; Pв -собственный вес пилота; P реакция, видно, что к моменту начала рабочего хода (с учетом импульса движения) пилот развивает усилие, более чем вчетверо превышающее его собственный вес. Отсюда, при рабочем ходе каждой педали даже в 0,25 м развиваемая мощность составит 4Pв • (0,25 + 0,25) 2Pв кгм/с, где 1 с -время одного полного цикла, т.е. полный ход каждой педали и возврат ее в исходное положение. При весе пилота 60 кг мощность равна 2 • 60 120 кгм/с, или 1,6 л. с. или 1,1776 кВт. Для сравнения: пилот самого популярного мускулолета "Альбатрос" Б. Аллен, чемпион США по велоспорту, при собственном весе в 61,2 кг развивал мощность на валу винта 1 л.с. в течение считанных секунд. Преимущество предлагаемого технического решения очевидно, т.к. Аллен выполнял работу сидя (почти как пассажир), загружая только ноги и не используя усилий мышц рук, собственного веса и импульса движения.
2. Движитель
Движитель представляет собой крылья (а не винт), расширяющиеся к периферии и расположенные радиально в двух уровнях, образуя два ротора, вращающиеся во взаимно противоположных направлениях. Движитель такой конструкции позволяет выполнить аппарат в целом намного меньше габаритов по сравнению с существующими мускулолетами.
Пример. Объемы параллелепипедов, в которые можно вписать мускулолет предлагаемой конструкции и известной, например "Альбатроса", соотносятся как 1: 30 (48 и 1450 м3).
Крылья предлагаемого устройства имеют еще две очень важные особенности.
Во-первых, т.к. линейные скорости различных поперечных сечений одного и того же крыла различны, то различны и поперечные сечения, и не только размерами (как, например, у самолета), но и по существу, т.е. каждому поперечному сечению крыла должно соответствовать только ему свойственное очертание оптимально (соответствующее) скорости его и сопротивлению воздуха при этом.
Во-вторых, известно, что одно из важнейших требований, предъявляемых к летательным аппаратам, это их легкость. При создании мускулолетов значение этого требования возрастает во много раз. Предлагаемый аппарат обладает малым весом, но автор искусственно увеличил вес движителя, взяв роторы из крыльев в ободы, тем самым сосредоточив дополнительный вес на периферии. Увеличение до некоторого предела (строго по расчету) веса движителя дает эффект за вычетом того негативного, что несет в себе увеличение веса как такового (например, рациональное использование явления инерции). Кроме того, обод будет препятствовать прогибу крыльев. Это позволит избежать разложения сил на составляющие, одна из которых будет направлена к центру (к оси), а, значит, потеряна.
3. Передача
Самой экономичной и эффективной передачей для предлагаемого мускулолета автор считает электрическую. Традиционная механическая трансмиссия из-за множества трущихся деталей, эксцентриситетов, разложения сил и прочего приводит к большим потерям мощности.
Собранные на педалях силы используются для вращения электрогенератора. Генератор имеет свои конструктивные особенности. Во-первых, он плоский во избежание тех же эксцентриситетов, т.к. располагается по центру базы между ногами пилота, а мышцы ног работают эффективней, когда расстояние между ними минимальное. Во-вторых, генератор большого диаметра и состоит из двух роторов с обмотками, вращающихся во взаимно противоположных направлениях. Именно выбором диаметра генератора и взаимным вращением роторов одного относительно другого можно достичь нужной линейной скорости движения обмоток роторов одной относительно другой, от чего зависит, в конечном счете, мощность генератора. При традиционном генераторе (при сравнительно небольшом диаметре и неподвижном статоре) без редуктора не обойтись. А это потери мощности.
Выработанная на электрогенераторе электроэнергия по проводам из материала с малым сопротивлением подается на электродвигатель, также состоящий из двух вращающихся во взаимно противоположных направлениях роторов. К ним крепятся роторы крыльев.
Особенность изобретения в том, что:
двигателем мускулолета является пилот с вертикальным рабочим положением;
электрическое устройство, передающее и распределяющее энергию рук и ног пилота, состоит из электродвигателя и электрогенератора;
несущие элементы мускулолета представляют собой крылья (а не винт, как в известных) с расположенным на периферии маховиком.
Остальные признаки заявленного мускулолета частные, поскольку характеризуют лишь конкретное выполнение того или иного узла мускулолета.
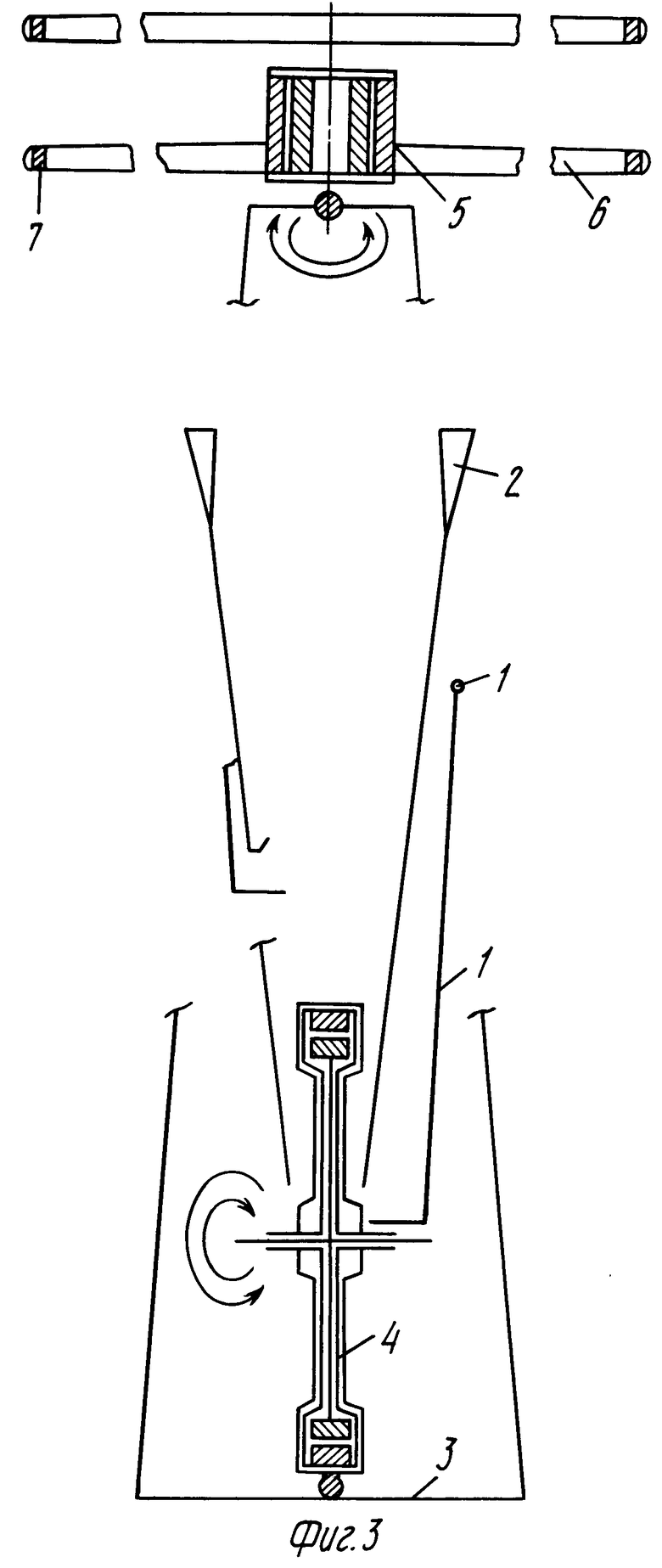
На фиг. 1 показана принципиальная схема распределения усилий предлагаемого мускулолета; на фиг. 2 принципиальная схема устройства предлагаемого мускулолета; на фиг. 3 принципиальная схема механизма передачи предлагаемого мускулолета.
Устройство содержит двигатель, состоящий из педалей 1, на которые пилот воздействует верхними и нижними конечностями, и строп 2, которыми он через плечи и/или пояс шарнирно связан с базой 3 аппарата (фиг. 1, 2), передаточного механизма, шарнирно связанного с базой 3 аппарата в центре ее (фиг. 3) и состоящегой из электрогенератора 4, выполненного плоским и с большим диаметром, включающего два ротора с обмотками, вращающимися во взаимно противоположных направлениях, электродвигателя 5, также состоящего из двух вращающихся во взаимно противоположных направлениях роторов, к которым крепятся крылья 6, расположенные радиально в двух уровнях, маховика 7, расположенного на периферии крыльев 6, выполненного в виде металлического обода.
Устройство работает следующим образом.
Пилот пристегивает себя стропами 2 к базе 3 шарнирно, становится на педали 1 и закрепляет конечности на них шарнирно. Затем начинает совершать движение поочередно ногами и/или руками левыми, правыми, при этом несколько отклоняясь корпусом вправо и влево (до набора нужных оборотов генератора), воздействуя при этом конечностями и собственным весом на педали 1, которые приводят в движение роторы генератора 4. Выработанная при этом энергия подается на электродвигатель 5 с вращающимися во взаимно противоположных направлениях роторами, которые, в свою очередь, приводят в движение крылья 6. Возникает подъемная сила крыла, обеспечивающая передвижение всего аппарата.
Предлагаемое изобретение частично реализовано в разработке, изготовлении и испытании мускулолета.
На фотографиях отражены проводимые автором испытания по приложению усилий из положения пилота стоя, как в предлагаемом изобретении (фото 1), и положения сидя, как в известном устройстве (фото 2).
Проводимые в ходе испытания исследования подтвердили правильность доводов, отраженных в заявке, и убедили в перспективности этих разработок.
| название | год | авторы | номер документа |
|---|---|---|---|
| МУСКУЛОЛЕТ (ВАРИАНТЫ) | 2022 |
|
RU2786028C1 |
| МУСКУЛЬНЫЙ ПРИВОД СТАРОВЕРОВА (ВАРИАНТЫ) | 2014 |
|
RU2560226C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
| ОРНИТОПТЕР | 2007 |
|
RU2378157C2 |
| СПОСОБ ЛАВРУШКИНА РЕАЛИЗАЦИИ ФИЗИЧЕСКИХ ВОЗМОЖНОСТЕЙ ЧЕЛОВЕКА | 1998 |
|
RU2144838C1 |
| БИПЛАН С МУСКУЛЬНЫМ ПРИВОДОМ | 2005 |
|
RU2302977C1 |
| МУСКУЛОЛЕТ ГОРШКОВОЙ | 2002 |
|
RU2253595C2 |
| Веломобиль | 1986 |
|
SU1399210A1 |
| ВЕЛОЭЛЕКТРОМОБИЛЬ | 2021 |
|
RU2769261C1 |
| МУСКУЛОЛЕТ | 2010 |
|
RU2434787C1 |
Использование: изобретение относится к летательным аппаратам, приводимым в действие мускульной силой человека. Сущность: мускулолет содержит движитель в виде двух соосных роторов противоположного вращения, передаточное устройство, состоящее из электродвигателя и электрогенератора, на котором закреплены педали. На периферии роторов установлены маховики. 1 з.п. ф-лы, 3 ил.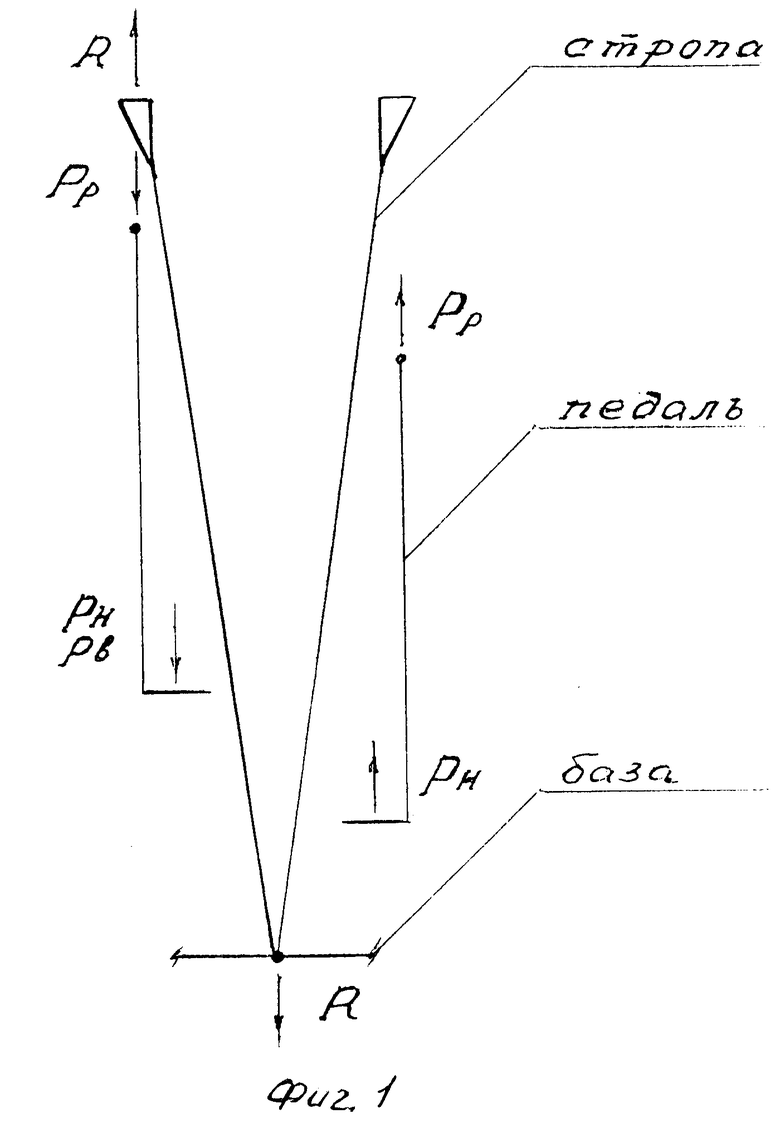
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Заявка Германии N 3702893, кл | |||
| Нефтяной конвертер | 1922 |
|
SU64A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Заявка Германии N 3911663, кл | |||
| Нефтяной конвертер | 1922 |
|
SU64A1 |
| Способ прогнозирования транслокации E.coli из кишечника при некультивируемом типе инфекционного процесса в эксперименте на кроликах | 2016 |
|
RU2628063C1 |
| Нефтяной конвертер | 1922 |
|
SU64A1 |
