Задачей настоящего изобретения является осуществление безмоторного полета человека без подготовительных операций, без разгона и без повышенных требований к физическим возможностям человека. Аппарат должен иметь возможность самостоятельного горизонтального маневра.
Область применения - аттракционы, спорт, спасательные операции, транспортное средство.
Аппаратами аналогично назначения служат орнитоптеры Леонардо да Винчи 1490 г., А. Липпиша, 1929 г. Попытки неудачны.
Известны реализации мускулолетов, дельтапланов - они не отвечают поставленной задаче.
Протатипом изобретения принимается воздушный шар с открытой снизу оболочкой и с газовой горелкой для подогрева воздуха внутри оболочки шара.
Пилот как двигатель (мотор) пассивен и распологается в гондоле вместе с газовыми горелками. Недостатком протатипа является малая подъемная сила на 1 куб. метр объема оболочки шара, что обусловлено малым изменением удельного веса воздуха при подогреве.
Другим недостатком является медленность операций прогрева воздуха внутри оболочки, вследствие чего процессы подъема и спуска замедлены. Существенным недостатком является невозможность самостоятельного горизонтального маневра.
Решение поставленной задачи достигается тем, что суммарная подъемная сила аппарата состоит из подъемной силы балллона воздушного шара и силы, развиваемой движителем вертикальной ориентации типа геликоптера (вертолета) с двумя несущими винтами со встречным вращением. Привод винтов осуществляется с помощью рычажного храпового механизма, приводимого в движение мускульным усилием человека. Так как часть веса аппарата и человека скомпенсирована подъемной силой воздушного шара, то мощности, развиваемой человеком при соответствующей степени компенсации, хватает для подъема. Степень компенсации “К” определятся отношением:

где Рш - подъемная сила баллона воздушного шара,
P∑ - полный вес аппарата с человеком и балластом.
Подъемная сила “Рч”, развиваемая движителем вертикальной ориентации и обеспечиваемая мускульным усилием человека, должна превысить значение:
Рч≥Р∑ -Рш=Р∑ (1-К)
Как видим, величина “Рч” может быть малой, в частности при К>1, аппарат может подниматься без усилий человека.
Однако требование быстроты вертикального маневра заставляет выбирать значения 0,5≤ К≤ 1, что достигается подбором веса балласта и подъемной силы баллона воздушного шара в соответствии с возможностями конкретного человека.
Решение поставленной задачи достигается так же тем, что с помощью перемещения балласта относительно оси вращения винтов, происходит перекос оси вращения винтов, вследствии чего возникает горизонтальная сила, вектор которой определяется действиями пилота.
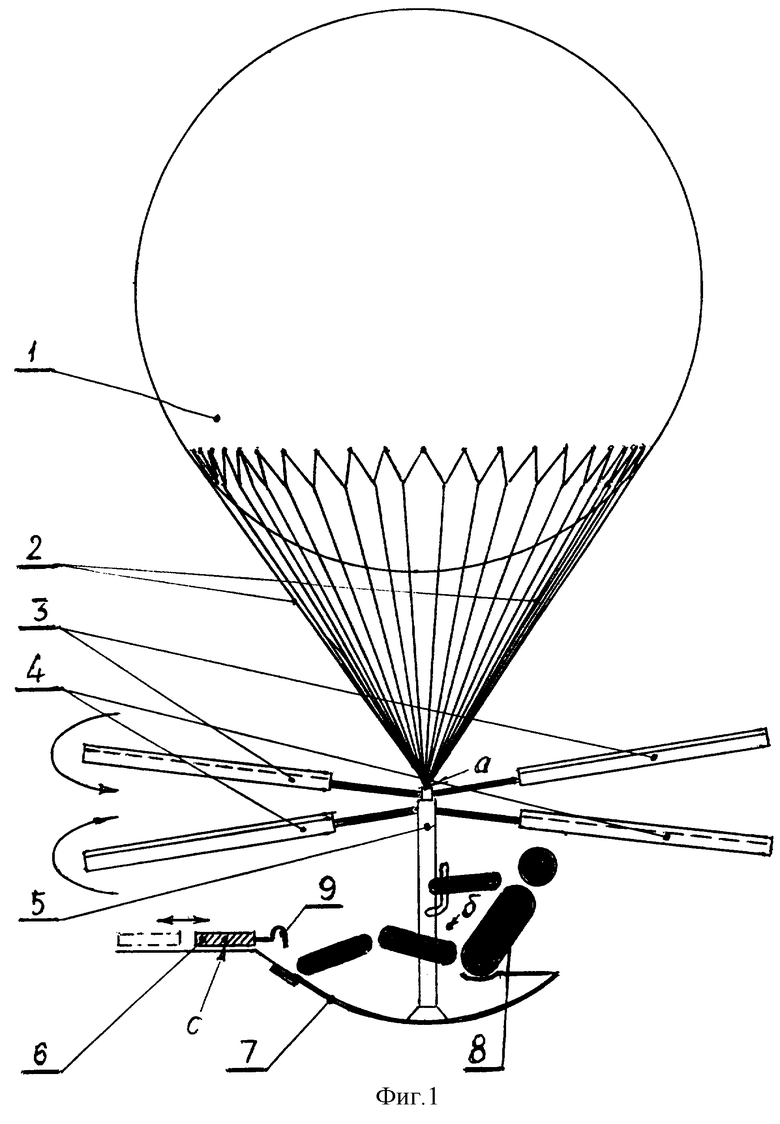
На фиг.1 изображен летательный аппарат безмоторный, который состоит из баллона воздушного шара 1, строп 2, верхнего винта 3, нижнего винта 4, привода винтов рычажного храпового раздельного для правой и левой руки 5, балласта подвижного самофиксирующегося 6, гондолы 7, пилота 8, крюка для перемещения балласта ногой (рукой) пилота 9. Так как пилот выполняет функцию двигателя, он включен в состав аппарата, как конструктивный элемент.
Точка “а” отвечает точке подвеса системы элементов п.п. 3, 4, 5,7,8.
Точка “с” - центр тяжести балласта подвижного самофиксирующегося, п.6.
Точка “б” - ориентировочное положение центра тяжести системы элементов п.п. 3, 4, 5, 7, 8.
V-образная конфигурация винтов необязательна, но целесообразна.
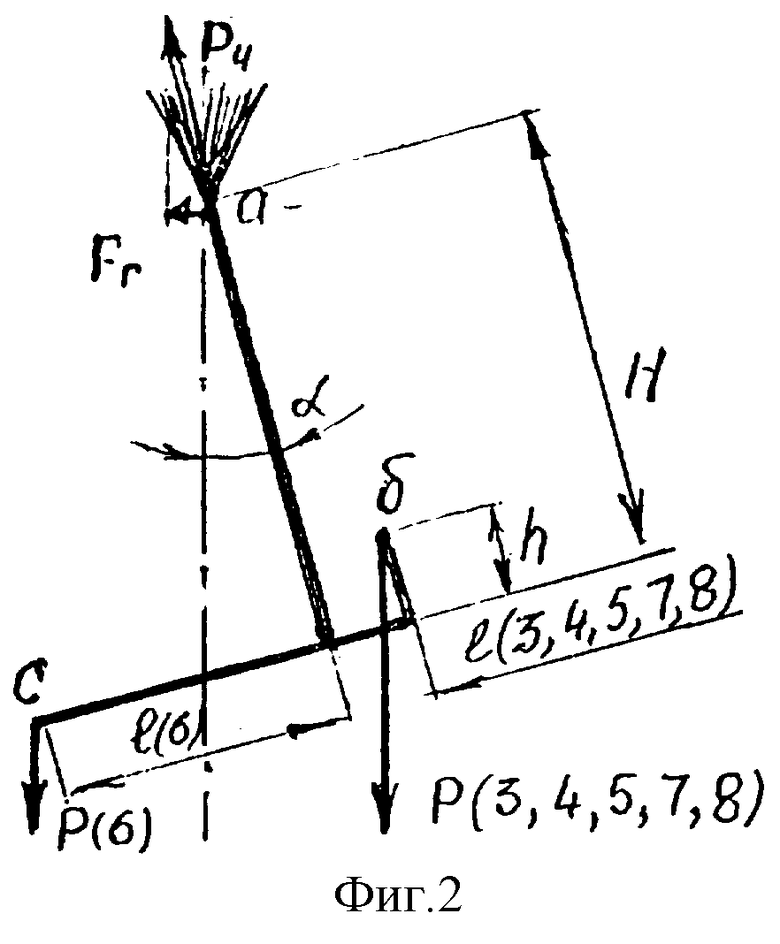
Фиг.2 является расчетной схемой горизонтальной силы "Fr".
Определения точек "а", "б", "с" те же, что и на фиг1.
Р(6) - вес элемента 6, т.е. балласта.
Р (3,4,5,7,8) - вес совокупности элементов 3,4,5,7,8.
1 (6) - расстояние от точки "с" до оси вращения винтов.
1 (3,4,5,7,8) - расстояние от центра тяжести совокупности элементов 3,4,5,7,8 до оси вращения винтов.
Н - превышение точки "а" над точкой "с".
h - превышение точки "б" над точкой "с".
Горизонтальная сила "Fr" равна:
Fr=РчSinα , где "α " - угол перекоса оси вращения винтов по отношению к вертикали.
Для справки: угол "α " вычисляется по формуле:

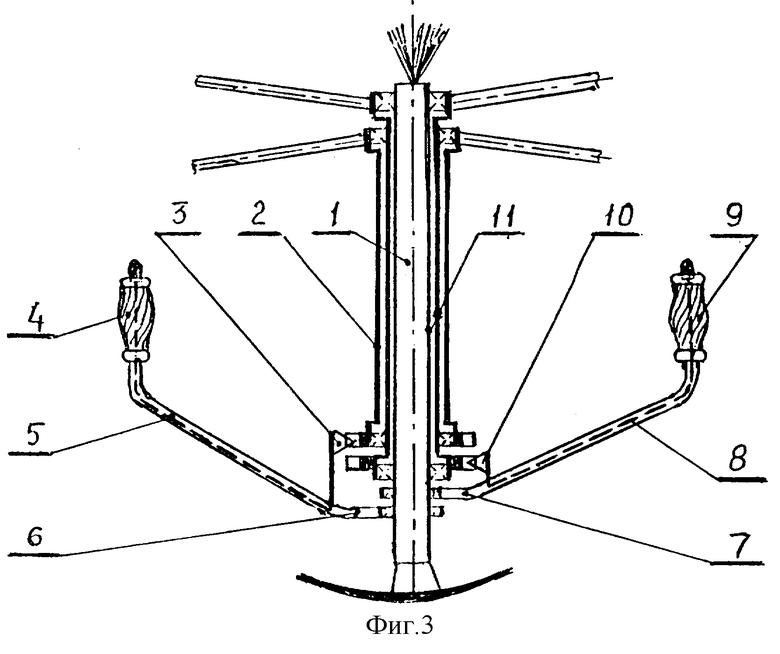
Фиг.3 - пример исполнения привода винтов рычажного храпового раздельного для правой и левой руки, причем он состоит из центральной стойки-консоли 1, трубчатого вала нижнего винта 2, храпового механизма нижнего винта 3, рукоятки нижнего винта 4, тросикового устройства для переброски собачки храпового механизма нижнего винта 5, рычага нижнего винта 6, рычага верхнего винта 7, тросикового устройства для переброски собачки храпового механизма верхнего винта 8, рукоятки верхнего винта 9, храпового механизма верхнего винта 10.
Обозначения и расположение подшипников не оцифрованы и ясны из чертежа.
В исходном положении аппарат без пилота заякорен. При размещении пилота 8 в гондоле 7 подъемная сила баллона 1 при отсутствии вращения винтов 3 и 4 недостаточна для подъема и аппарат удерживается на земле.
При приведении винтов 3 и 4 во вращение, осуществляемого пилотом посредством привода винтов рычажного храпового раздельного для правой и левой руки 5, появляется дополнительная подъемная сила, направленная вверх "Рч". Предполагается, что балласт, подвижный самофиксирующийся 6, расположен в "нейтральном положении", т.е. угол "α "=0.
Это достигается при условии 1(6)Р(6)=1(3,4,5,7,8)Р(3,4,5,7,8).
Аппарат поднимается при условии Рч≥ P∑ (1-K) до нужной пилоту высоты. Очень большие высоты, где плотность воздуха заметно падает, трудно достижимы, что служит естественным ограничением и предохраняет от опасности разрыва баллона.
В полете пилот, изменяя интенсивность работы правой (левой) руки, либо меняет ориентацию аппарата по азимуту, либо сохраняет ее. Эта возможность появляется в силу возникновения разностного вращающего момента при разных скоростях вращения винтов.
При изменении расстояния 1 (6) с помощью крюка 9 пилот по своему желанию задает угол перекоса, т.е. задает горизонтальную силу "Fr", а следовательно горизонтальную скорость.
Поза гребца позволяет пилоту задействовать группу мышц сгибателей верхних конечностей (рук), сгибатели спины и разгибателей нижних конечностей (ног). Это обеспечивает наибольшую мощность пилота как двигателя.
При прекращении работы пилота, как двигателя аппарат опускается, т.к. Рч=0<P∑ (1-K). Скорость спуска определяется степенью компенсации и аэродинамическим сопротивлением баллона и может быть снижена до безопасных пределов.
При необходимости форсировать спуск пилот с помощью тросиковых устройств 5 и 8 осуществляет реверсирование вращения винтов, что приводит к появлению силы, направленной вниз, и спуск ускоряется.
В приведенном примере исполнения привода винтов пилоту при ускоренном спуске нужно отжимать рукоятки 4, 9 "от себя". Вполне возможно исполнение, когда при спуске пилот будет работать руками "на себя".
Для возможности возвращения аппарата в точку старта при наличии ветра, его скорость не должна превышать критических значений (скорее всего 3-5 м/сек).
Естественно, критические значения тем больше, чем больше мощность, развиваемая конкретным человеком.
При использовании аппарата в качестве спортивного снаряда, набор указанных возможностей маневрирования позволяет получить азартные, зрелищные соревнования.
При локальном разрыве оболочки баллона, пилот имеет шанс спастись, работая с максимальной мощностью.
Все маневры не требуют "стравливания" газа, заполняющего баллон, что позволяет использовать легкий, негорючий, но дорогой гелий. Использование гелия позволяет минимизировать объем баллона.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ (МАХОЛЕТ ГОРШКОВОЙ) И ПОВОРОТНОЕ КРЫЛО ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2455199C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
| СПОСОБ УПРАВЛЕНИЯ, СТАБИЛИЗАЦИИ И СОЗДАНИЯ ДОПОЛНИТЕЛЬНОЙ ПОДЪЕМНОЙ СИЛЫ ДИРИЖАБЛЯ | 2013 |
|
RU2532448C1 |
| УСТРОЙСТВО ДЛЯ СПУСКА С ВЫСОТНЫХ ОБЪЕКТОВ ПРИ ПОМОЩИ АВТОРОТАЦИИ | 2021 |
|
RU2757464C1 |
| ГИБРИДНЫЙ ДИРИЖАБЛЬ ЛИНЗООБРАЗНОЙ ФОРМЫ | 2012 |
|
RU2546027C2 |
| СПАСАТЕЛЬНЫЙ ВОЗДУХОПЛАВАТЕЛЬНЫЙ АППАРАТ | 2018 |
|
RU2686611C1 |
| САМОХОДНОЕ ПОДВОДНОЕ КАФЕ | 2007 |
|
RU2348565C1 |
| КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ЛЕГЧЕ ВОЗДУХА (ВАРИАНТЫ) | 2006 |
|
RU2318697C2 |
| ДИРИЖАБЛЬ МНОГОЦЕЛЕВОЙ | 2012 |
|
RU2507111C2 |
| АЭРОСТАТИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ (ВАРИАНТЫ) | 2011 |
|
RU2511500C2 |
Изобретение относится к летательным аппаратам с мускульным приводом. Летательный аппарат содержит воздушный шар, привод механический, движитель аэродинамический и гондолу. Воздушный шар выполнен так, что подъемная сила баллона составляет более половины, но не более полного веса аппарата и пилота. Движитель вертикальной ориентации сконструирован как геликоптер с двумя винтами со встречным вращением. Привод винтов - рычажный храповой раздельный для правой и левой руки. Предусмотрена возможность реверсирования вращения винтов. Пилот размещается в гондоле в позиции гребца. Возникновение горизонтальной силы достигается перекосом оси вращения винтов при перемещении балласта. Технический результат - расширение возможностей полета. 3 ил.
Летательный аппарат безмоторный, содержащий воздушный шар, привод механический, движитель аэродинамический, гондолу, отличающийся тем, что подъемная сила баллона воздушного шара составляет более половины, но не более полного веса аппарата и пилота, движитель вертикальной ориентации сконструирован как геликоптер с двумя винтами со встречным вращением, привод винтов рычажный храповой раздельный для правой и левой рук, предусмотрена возможность реверсирования вращения винтов, пилот размещается в гондоле в позиции гребца, возникновение горизонтальной силы достигается перекосом оси вращения винтов при перемещении балласта.
| US 4061293 A, 06.12.1977 | |||
| Способ приготовления сернистого красителя защитного цвета | 1921 |
|
SU84A1 |
| Летательный аппарат с мускульным приводом | 1991 |
|
SU1804413A3 |
| Компактный дозатор-смеситель сыпучих материалов | 2018 |
|
RU2704192C1 |

