Изобретение относится к испытательным аппаратам орнитоптерам.
Орнитоптер - летательный аппарат с машущими крыльями, летающий с помощью силы мышц человека и с помощью использования энергии атакующего потока воздуха.
Орнитоптер содержит носилки, на которых располагается пилот, и крылья, крепящиеся на них. Носилки сделаны из труб, в которые встроены четыре пропеллера с гладкой поверхностью, по которым могут скользить крылья с помощью ползунов, а пилот может двигать крылья руками и ногами с помощью педалей и рукояток. Ползуны, передаточное звено пилота со шпангоутами крыла, которое совершает поступательно-возвратное движение с поворотом, а крылья выполняют машущие и толкающие движения. Эти толкающие движения аппарата вперед зависят от скорости протекания воздуха в пограничных ламинарных слоях по поверхности аппарата и от использования энергии атакующего потока.
Изобретение направлено на повышение эффективности использования мускульной силы и относится к техническим средствам, позволяющее людям подобно птицам летать по воздуху.
Известно изобретение «Мускулолет», в котором для создания подъемной силы создан мускульный привод, обеспечивающий мах крыльев при совершении поступательно-возвратных движений с помощью ног и рук пилота специальными устройствами, встроенными в носилки, на которых лежит пилот. См. пат. RU №2191718 от 27.10.02 г. Основной недостаток известного изобретения состоит в том, что он не использует энергию лобового сопротивления воздуха, сопровождающего его в полете.
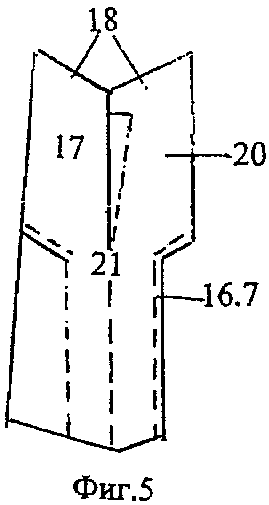
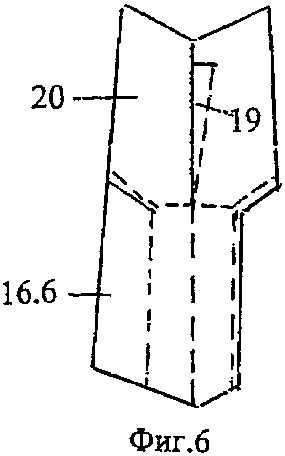
Изобретение состоит в том, что крыло выполнено из антиволнового материала, перья крыла размещены веером, а часть перьев крыла выполнены из труб и заполнены синтепоном, в каждой трубе сделаны четыре щели: входная, вторая дросселирующая; третья щель входит в соседнюю трубу, а четвертая - выходная. Каждая труба имеет входной коллектор, куда поступает обратная волна атакующего потока воздуха и нагревает синтепон, с другой стороны атмосферный воздух проходит через дросселирующую щель и охлаждает его, в результате в коллекторе получается воздух с повышенной плотностью. Воздух повышенной плотности, проходя сквозь перфорированную поверхность пера, уменьшает слой налипания частиц воздуха на его поверхности, что уменьшает интенсивность вихреобразования, другая часть воздуха через щель подается в соседнюю трубу, где повышает в ней давление и температуру. В последующих трубах процесс повторяется, а где есть выходная щель, там воздух повышенного давления выбрасывается в атмосферу, создавая реактивную тягу.
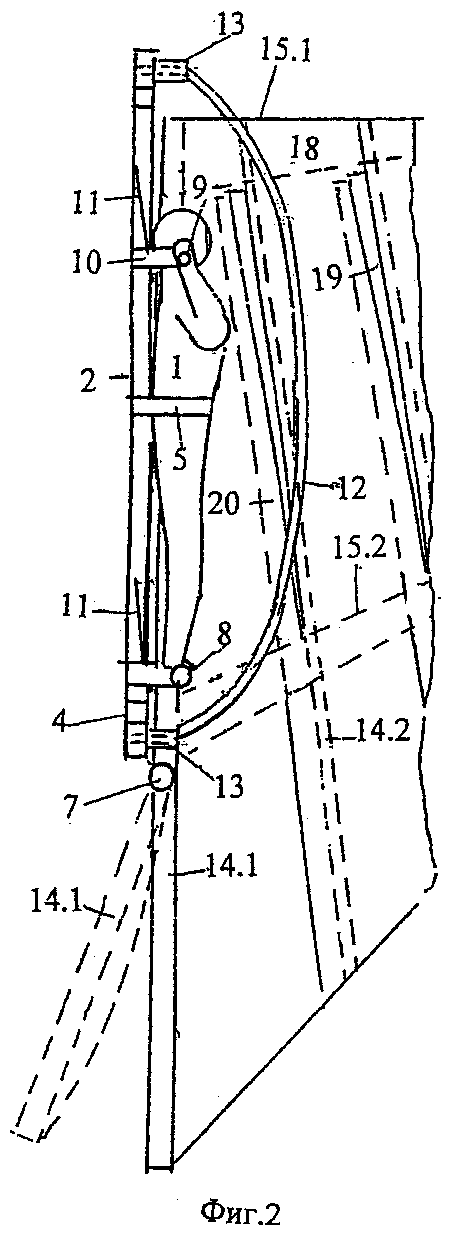
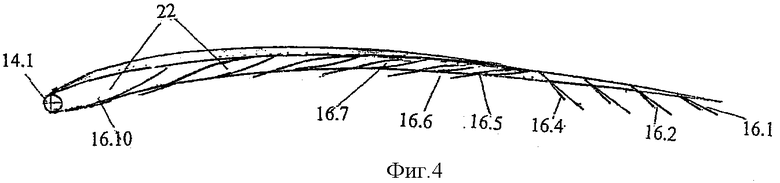
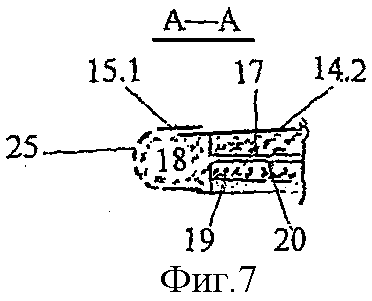
На чертежах (фиг.1-7) представлена конструкция орнитоптера, где 1 - пилот, 2 - носилки, 3 - крыло, 4 - перекладины в носилках, 5 - пояс, крепящий пилота к носилкам, 6 - плечевой упор, 7 - шарнир, управляющий элероном, 8 - педаль мускульного привода, 9 - рукоятка мускульного привода, 10 - ползун, промежуточное звено, соединяющие пилота с крылом, 11 - пропеллер, 12 - шасси, 13 - амортизатор, 14,1 - шпангоут, основание крыла, 14,2-14,10 - упругие пластины, основы перьев, 15,1 и 15,2 - стрингеры, 16,1-16,4 - перья клапанно-толкающие, 16,5 и 16,6 - перья-трубы термальные, 16,7-16,10 - перья-трубы термально-реактивные, 17 - коллектор, 18 - входное окно, 19 - дросселирующая щель, 20 - переходная щель, 21 - выходная щель, 22 - сопло, 23 - элерон, 24 - хвост. Перья 16,5-16,10 полые, заполнены синтепоном. Элерон 23 управляется рукояткой 9 с помощью шарнира 7 через трос. Хвост 24 управляется тросом, соединенным с шлемом на голове. Перья-трубы соединены между собой и крепятся к стрингерам с помощью упругих пластин 14. Работу термодинамики обеспечивает механическая работа крыла, которое выполняет гребковые толкания.
Выбор параметров для орнитоптера.
Механика полета орнитоптера основана на обмене кинетических энергий при его падении, между весом пилота с носилками и весом крыльев. Момент зависания можно выразить уравнением баланса М(g·t1)=m(g·t2+v)2.
Выбрав режим маха крыльев, можно вычислить энергию, затрачиваемую пилотом на зависание: N=m*v, где М - вес пилота и носилок, m - вес крыльев, g - скорость свободного падения, t1 - время подъема крыла, t2 - время опускания крыла, v - скорость подъема крыла. Затрата энергии пилотом на толкание орнитоптера можно выразить так:
N=G·(l1/t2+l2/t2),
где G - вес аппарата, l1 - движение крыла по вертикали, l2 - движение крыла по горизонтали.
На основании этих представлений составлена формула затраты энергии пилотом на опускание крыла
N=cosω·К·М·n·µ√((m·v)2+(G·(l1/t2+l2/t2))2),
где ω - угол маха крыла, К - коэффициент нагрузки на подшипники, n - коэффициент трения в подшипниках, µ - качество крыла, где µ=Sлоб/Sкp - отношение площадей крыльев.
На фиг.1 показан орнитоптер, когда он находится в планирующем полете. На фиг.2 - расположение пилота в пространстве. На фиг.3 показан вид профиля атакующего стрингера. На фиг.4 - вид заднего профиля крыла, когда крыло находится в момент подъема. На фиг.5 представлен раскрой термально-реактивного пера. На фиг.6 - термальное перо. На фиг7 - вид А-А.
Принцип работы орнитоптера.
Орнитоптер устанавливается на возвышенном месте, пилот ложится на носилки 2 и жестко закрепляется на них с помощью пояса 5 так, чтобы плечи упирались в плечевые упоры 6. Затем пилот вставляет ноги в педали 8, а руками берется за поручни 9, устанавливает хвост 24 и элероны 23 в стартовое положение. Двигая ползуны 10 по поверхности пропеллеров, пилот выводит крылья в верхнее положение, то есть крыло делает медленный взмах. Затем резким движением рук и ног пилот заставляет ползуны 10 сканировать по поверхности пропеллеров 11, а крылья 16 опускаться вниз. Просветы между перьев закрываются, а подкрылки перьев 16.1-16.4 открываются и производят толкающие движение вперед (гребок воздуха). Входные коллекторы 17, заполненные синтепоном, принимают воздух обратной волны от волны лобового потока, прошедший чрез входные окна 18, и атмосферный воздух, прошедший через дросселирующие щели 19. Воздух, прошедший через щели 20 в соседние перья, увеличивает в них давление. Воздух повышенного давления в перьях 16.7-16.10 выбрасывается через щели 21 в атмосферу, что создает реактивную толкающую тягу. После опускания крыльев сразу начинается быстрый подъем крыльев вверх, и процесс повторяется с меньшими усилиями для пилота. После набора высоты пилот продолжает горизонтальный полет. Таким образом, крыло обеспечивает полет орнитоптера гребковым толканием и реактивным толканием.
| название | год | авторы | номер документа |
|---|---|---|---|
| МУСКУЛОЛЕТ | 1999 |
|
RU2191718C2 |
| МУСКУЛЬНЫЙ ПЛАВАЮЩИЙ МАХОЛЕТ "ЛЕБЕДУШКА" | 2004 |
|
RU2304546C2 |
| МУСКУЛОЛЕТ (ВАРИАНТЫ) | 2022 |
|
RU2786028C1 |
| УПРУГО ИЗГИБАЮЩЕЕСЯ КРЫЛО МАХОЛЕТА И МАХОЛЕТ | 2015 |
|
RU2615030C2 |
| Динамический инерционный махолет (ДИМа) | 2021 |
|
RU2779547C1 |
| БИОАЭРОДИНАМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМИ КРЫЛЬЯМИ | 2009 |
|
RU2392189C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМ КРЫЛОМ | 2010 |
|
RU2452660C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
| МАХОЛЕТ | 2010 |
|
RU2451623C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1999 |
|
RU2155144C1 |

Изобретение относится к летательным аппаратам с машущими крыльями, приводимыми в движение с помощью мускульной силы. Орнитоптер содержит крылья и носилки. Носилки сделаны из труб, в которые врезаны плоскости. По плоскостям двигаются крылья, создавая машущие и толкающие движения. Оперение выполнено из труб-перьев, соединенных веером. Каждое перо состоит из термодинамической и механической частей. Термодинамическая часть заполнена синтепоном и имеет по три щели. Одна щель предназначена для входа воздуха. Вторая щель соединена с термодинамической частью соседнего пера для передачи повышенного давления воздуха. Третья щель соединена с механической частью пера-жалюзи для выброса воздуха в атмосферу, создавая реактивную тягу. Достигается повышение эффективности использования мускульной силы. 7 ил.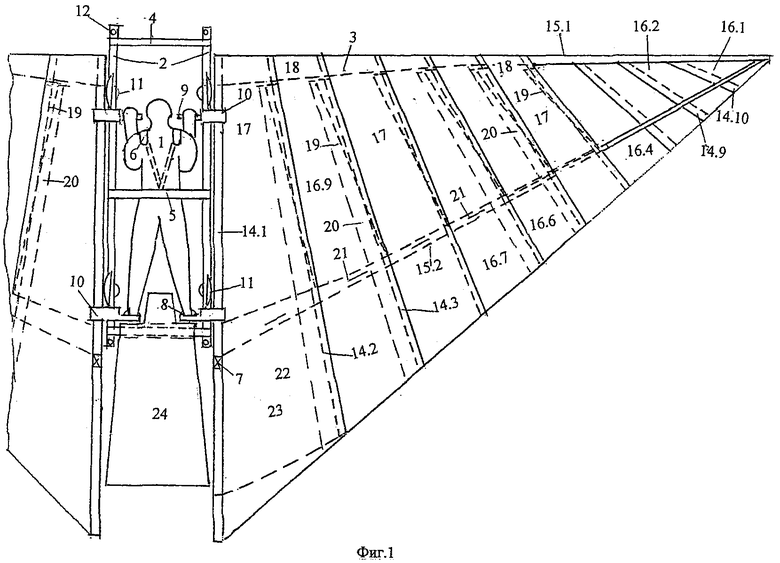
Орнитоптер, имеющий крылья, носилки, сделанные из труб, в которые врезаны плоскости, по которым двигаются крылья, создающие машущие и толкающие движения, отличающийся тем, что оперение выполнено из труб-перьев, соединенных веером, а каждое перо состоит из термодинамической и механической частей, термодинамическая часть заполнена синтепоном и имеет по три щели, одна из которых предназначена для входа воздуха, вторая соединена с термодинамической частью соседнего пера для передачи повышенного давления воздуха, а третья щель соединена с механической частью пера-жалюзи для выброса воздуха в атмосферу, создавая реактивную тягу.
| МУСКУЛОЛЕТ | 1999 |
|
RU2191718C2 |
| ОРНИТОПТЕР ФЕТИСОВА | 1965 |
|
SU304185A1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1997 |
|
RU2138424C1 |
| DE 19509774 A1, 19.09.1996 | |||
| Способ очистки почвы от загрязнения нефтью и нефтепродуктами | 2018 |
|
RU2687125C1 |

