Изобретение относится к авиационной технике, а более конкретно - к летательным аппаратам (ЛА) тяжелее воздуха, приводимым в движение мускульной силой человека и предназначенным для использования в спортивной авиации.
Известны ЛА без силового привода. В таких аппаратах в качестве движителя используются воздушные винты, машущие, качающиеся крылья и пр., приводимые в движение мускульной силой человека посредством различного рода механических передач (см. патент ФРГ №2503177, класс В64С 33/02). При этом часть энергии пилота теряется в механизмах передач, другая часть теряется в самом движителе, что снижает эффективность использования мускульной силы пилота.
Наиболее экономичное использование механизма передачи и движителя осуществляется в ЛА, в которых применены качающиеся крылья.
Известное устройство, описанное в экономичном способе использования подъемной силы и силы тяги ЛА (см. патент Франции №2447319 по классу В64С 31/04, 33/02), имеет по крайней мере два крыла, выполняющих различную функцию. Одно из них создает только подъемную силу, а другое - кроме того, силу тяги ЛА, направленную вперед. Сила тяги сравнима по величине с силой действия лопасти воздушного винта, имеющей большой шаг и значительную аэродинамическую нагрузку. Каждая из этих функций выполняется каждым из крыльев, причем попеременно в процессе полета.
В этом устройстве используется сложный механизм преобразования движения, в котором оба крыла используются для создания силы тяги ЛА.
Указанные недостатки снижают эффективность использования мускульной силы человека и возможности использования различных режимов полета ЛА при взлете, планировании, посадке и т.п.
Целью настоящего изобретения является устранение указанных недостатков, улучшение летных качеств ЛА и повышение эффективности использования мускульной силы пилота.
Указанная цель достигается тем, что в предлагаемом ЛА, приводимом в движение мускульной силой человека, имеющем обтекаемый фюзеляж, два несущих крыла, расположенных одно над другим по типу биплана, стабилизатор, киль, шасси и ручное управление на элероны и рули хвоста, в качестве движителя биплана используется нижнее крыло, которое закреплено к ступням ног пилота, имеет опоры для ступней ног пилота и крепления для последних с возможностью вертикальных перемещений и поворотов вокруг оси, направленной перпендикулярно движению биплана и проходящей вблизи точки приложения аэродинамических сил крыла, при сгибании и разгибании ног пилота, находящегося в кабине.
Шасси крепятся к фюзеляжу с выносом в вертикальном направлении, обеспечивающим свободное перемещение нижней плоскости при движении биплана на шасси по твердой поверхности.
Непосредственная передача усилий ног пилота к нижнему крылу предельно упрощает механизм передачи мощности к движителю и сводит к минимуму потери мускульной мощности пилота. Использование в качестве двигателя, в основном, самых сильных мышц человека: мышц бедер и спины - также способствует более эффективному использованию мускульной силы человека.
Установленные внутри фюзеляжа, в кабине пилота, упоры для кистей рук, спины, плеч и подмышек пилота способствуют усилению давления и тяги ног пилота на нижнее крыло биплана. Этому же способствует откидное сиденье пилота.
С целью фиксации пилотом выбранного режима полета, например при планировании или при полете с фиксированным углом атаки нижнего крыла, установлены ручные фиксаторы положения нижнего крыла.
Устранение возможных перегрузок на мышцы ног пилота и защита от возможных ошибок в движениях ног во время полета достигается наличием ограничителей положения нижнего крыла по вертикали и по повороту вокруг вышеупомянутой оси вращения.
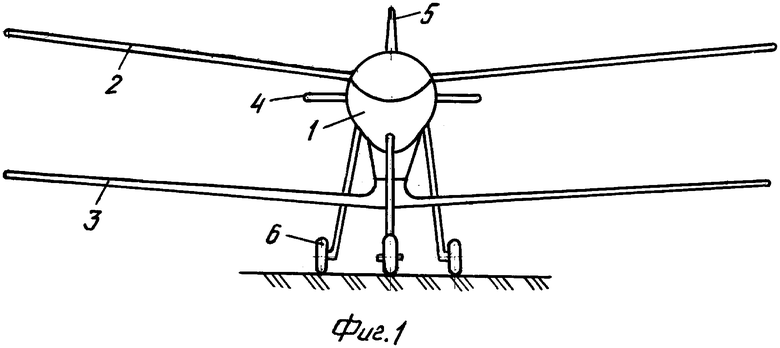
На фиг.1 представлен вид спереди биплана с мускульным приводом.
На фиг.2 показан вид сбоку предложенного биплана с частичным вырезом его стенки в месте расположения кабины пилота.
Биплан, приводимый в движение мускульной силой человека, имеет обтекаемой формы фюзеляж 1, верхнее крыло 2, нижнее крыло 3, стабилизатор 4, киль 5, шасси 6, ручное управление 7 на элероны и рули хвоста. Поворот нижнего крыла вокруг оси 8 и движение его в вертикальном направлении производится ногами пилота, которые фиксируются на нижнем крыле креплениями 9 и закрыты "телескопически" растягиваемым обтекателем 10, имеющем достаточно широкий зазор между его верхней и нижней частями.
Пилот может упираться руками, держась за упоры для кистей рук 11, а также упираться в упоры для спины 12, таза 13, плеч и подмышек 14.
Положение нижнего крыла может фиксироваться вручную прижимающими тяги 15, 16 винтами 17, 18 на неподвижных направляющих 19, 20, которые, как и направляющие 21, 22, жестко закреплены на фюзеляже.
Ограничители движения нижней плоскости по высоте вертикального перемещения и интервалу изменения угла атаки для крайних вертикальных положений представляют собой две подвижные тяги 15, 16 с фиксируемыми на них скобами 23, 24, 25, 26 посредством винтов 27, 28, 29, 30.
Изменение угла атаки нижнего крыла возможно благодаря независимости движения вертикальных тяг 15 и 16 по своим направляющим 19, 21 и 20, 22, а также благодаря горизонтальным пазам вдоль хорды нижнего крыла, служащим направляющими для ползунов-роликов, сидящих на нижних концах тяг 15 и 16.
Полет на Биплане-С осуществляется следующим образом.
В соответствии с ростом пилота и требуемым режимом полета устанавливаются ограничители движения крыла 3 посредством сдвига по тягам 15 и 16 скоб 23, 24, 25, 26 и закрепления их винтами 27, 28, 29, 30. Откидывается сиденье 13. Освобождаются фиксаторы 17, 18 крыла. Пилот берет "на себя" штурвал ручного управления 7, создав повышенную подъемную силу верхнего крыла. Упираясь в упоры 12, 14 и разгибая обе ноги, пилот опускает нижнюю плоскость 3 при отрицательном угле атаки. Когда скобы 24 и 26 доходят до упора с направляющими 21 и 22, нижнее крыло достигает своего крайнего нижнего положения. При этом нижнее крыло имеет неотрицательный угол атаки, что обеспечивается предварительной установкой скоб 24 и 26. В этот момент пилот ручное управление 7 переводит в "среднее" положение. Затем пилот, сгибая обе ноги и удерживая нижнее крыло с положительным углом атаки, поднимает его до крайнего верхнего положения, при котором скобы 23 и 25 упираются в торцы направляющих 19 и 20.
Далее описанный цикл движении повторяется.
Полет с мускульным приводом можно осуществить и при фиксированном положении рулевого управления 7 с упором кистями рук на упоры 11.
Режим полета, определяемый скоростью перемещения нижнего крыла и величинами его углов атаки, пилот выбирает сам, руководствуясь ощущением силовых усилий ног, например по ощущению веса нижнего крыла, которое во время полета должно практически отсутствовать.
При планировании положение крыла 3 фиксируется винтами 17 и 18, устанавливается сиденье 13, управление полетом осуществляется штурвалом рулевого управления 7.
Использование в качестве движителя несущего крыла биплана, отсутствие механизма привода на это крыло и возможность перехода в любой момент в требуемый режим полета позволяет пилоту экономно использовать свои мускульные силы. При этом ограничители движения крыла упрощают работу пилота и предохраняют от ошибочных движений.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
| МУСКУЛЬНЫЙ ПЛАВАЮЩИЙ МАХОЛЕТ "ЛЕБЕДУШКА" | 2004 |
|
RU2304546C2 |
| СПОСОБ ПЛАНИРУЮЩЕГО ПОЛЕТА И ЛЕТАТЕЛЬНЫЙ АППАРАТ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2008 |
|
RU2397109C2 |
| Самолет | 1990 |
|
SU1762747A3 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 1994 |
|
RU2093422C1 |
| МУСКУЛОЛЕТ (ВАРИАНТЫ) | 2022 |
|
RU2786028C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2017 |
|
RU2672308C1 |
| САМОЛЕТ ГОРИЗОНТАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2006 |
|
RU2350510C2 |
| МУСКУЛОЛЕТ | 1999 |
|
RU2191718C2 |
| ОРНИТОПТЕР | 2007 |
|
RU2378157C2 |
Изобретение относится к авиации. Биплан содержит фюзеляж, два несущих крыла, стабилизатор, киль, шасси, ручное управление (7) на элероны и рули хвоста. Нижнее крыло имеет опоры для двух ступней ног пилота и крепления (9) для последних с возможностью вертикальных перемещений и поворотов вокруг оси (8), направленной перпендикулярно движению биплана и проходящей вблизи точки приложения аэродинамических сил крыла. В кабине установлены упоры (11) для кистей рук пилота, упоры (12) для спины, упоры (14) для плеч и подмышек, откидное сиденье (13). Нижнее крыло снабжено ручным фиксатором положения и ограничителями положения по вертикали и по повороту вокруг вышеупомянутой оси. Изобретение повышает экономичность использования мускульной силы пилота. 2 ил.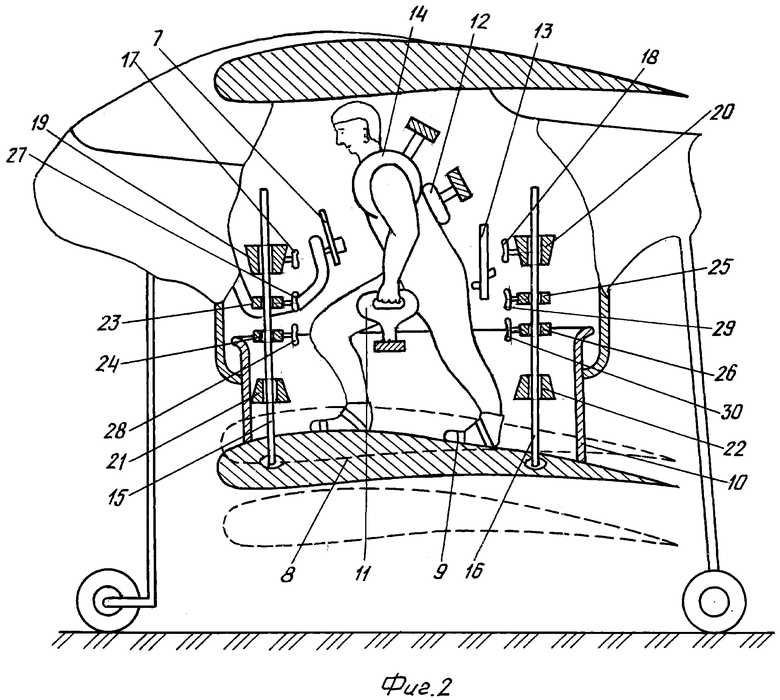
Биплан с мускульным приводом, содержащий обтекаемый фюзеляж, два несущих крыла, расположенных одно над другим, стабилизатор, киль, шасси, ручное управление на элероны и рули хвоста, отличающийся тем, что, с целью повышения экономичности использования мускульной силы пилота, нижнее крыло имеет опоры для двух ступней ног пилота и крепления для последних с возможностью вертикальных перемещений и поворотов нижнего крыла вокруг оси, направленной перпендикулярно движению биплана и проходящей вблизи точки приложения аэродинамических сил крыла, при сгибании и разгибании ног пилота, находящегося в кабине, где установлены упоры для кистей рук, спины, плеч, подмышек пилота и откидное сиденье, нижнее крыло снабжено ручным фиксатором положения и ограничителями положения по вертикали и по повороту вокруг вышеупомянутой оси.
| Вертлюг для гидрометрических работ | 1934 |
|
SU41702A1 |
| МУСКУЛОЛЕТ-БИПЛАН С ПОДВИЖНЫМИ ОТНОСИТЕЛЬНО ДРУГ ДРУГА ПО ВЕРТИКАЛИ КРЫЛЬЯМИ | 1999 |
|
RU2171759C1 |
| Устройство для тренировки пловцов | 1980 |
|
SU942781A1 |
| УСТРОЙСТВО ПРЕДПУСКОВОГО ПРОГРЕВА ПРИВОДА ЗЕМЛЕРОЙНО-СТРОИТЕЛЬНОЙ МАШИНЫ | 1994 |
|
RU2077639C1 |

