Изобретение относится к способу управления краном или аналогичным устройствам, который может быть использован, например, при управлении мостовым краном и в котором оператор крана подает заданные значения скорости от системы управления краном к его исполнительным органам в качестве сигналов управления, причем заданные значения скорости, поданные оператором, считывают в систему управления.
Известен способ управления механизмом горизонтального перемещения подвешенного на гибкой связи грузозахватного органа крана, заключающийся в подаче оператором заданных значений скорости в систему управления механизмом перемещения [1]
Проблема в известных решениях состоит в том, что одинаковые фрагменты сигнала управления, добавляемые один к другому в определенный момент, отрабатываются последовательно, а с другой стороны, в известных решениях требуется, чтобы отработка предыдущего сигнала управления была завершена до начала следующего. В наиболее часто выполняемых управляемых движениях крана отработка сигнала управления занимает от 4 до 10 секунд, вследствие чего известные решения не очень облегчают работу оператора крана.
Целью изобретения является повышение точности управления.
Поставленная цель достигается тем, что в способе управления механизмом горизонтального перемещения подвешенного на гибкой связи грузозахватного органа крана, заключающемся в подаче оператором заданных значений скорости в систему управления механизмом перемещения, каждое заданное значение скорости сравнивают с предыдущим заданным значением скорости, формируют сигнал ускорения для соответствующего изменения скорости и запоминают его, суммируют значения изменения скорости, обусловленные запомненными сигналами ускорения в данный момент времени, и прибавляют эту сумму к предыдущему заданному значению скорости, при этом полученное значение скорости является скорректированным заданным значением скорости, которое задают как новую команду управления, запоминание сигналов ускорения производят в специальной таблице, а скорректированное значение заданной скорости задают в качестве новой команды непосредственно после корректирования до окончания сигнала управления, соответствующего предыдущему значению заданной скорости.
Способ, являющийся предметом настоящего изобретения, основан на идее улучшения параметров системы управления краном путем сложения, определенным образом, различных сигналов управления, и устранения тем самым колебания груза после сообщения ему ускорения.
Способ управления краном в соответствии с настоящим изобретением обеспечивает значительные преимущества, наиболее важным из которых является улучшение параметров системы управления, обслуживающей оператора крана. При использовании способа согласно настоящему изобретению желаемое конечное значение, к которому стремится скорость при сообщении ускорения, может быть в любой момент времени случайным образом изменено, оно может быть изменено также во время подачи сигналов ускорения и замедления. При этом новая желаемая конечная скорость достигается без нежелательных последующих колебаний груза. На практике такие ситуации возникают также, когда система управления по той или иной причине посылает неверные команды управления, в результате чего кран получает ускорение в направлении достижения нового значения конечной скорости. Благодаря способу согласно настоящему изобретению результат воздействия таких неверных команд при работе крана и колебаниях груза может быть эффективно устранен.
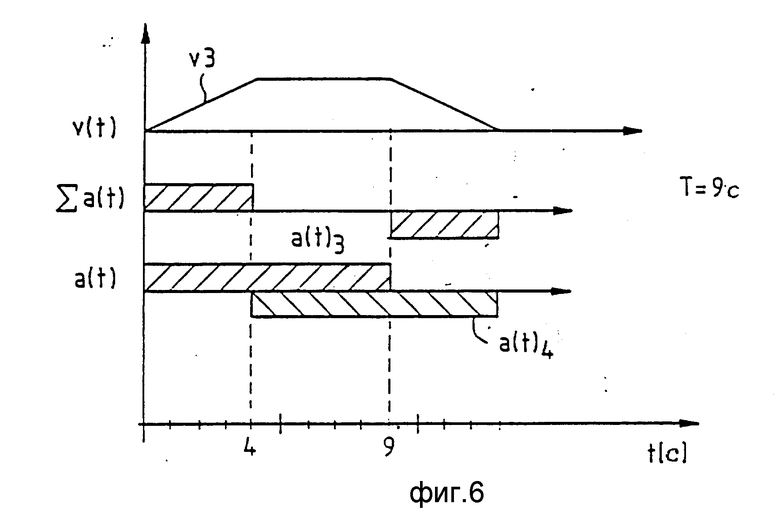
Фиг. 1 изображает схематично мостовой кран, фиг. 2 диаграмму сигнала скорости, действующего как сигнал управления, фиг. 3 алгоритм способа управления согласно настоящему изобретению, фиг. 4 исполнительную таблицу в варианте предпочтительного осуществления изобретения, фиг. 5 суммирование сигналов ускорения и сигнал скорости, определяемый суммой, фиг. 6 сумму двух разнополярных сигналов ускорения и сигнал скорости, определяемый суммой.
В соответствии с фиг. 1, тележка 1 выполнена с возможностью перемещения вдоль мостовой балки 3 мостового крана 2. Мостовая балка 3, в свою очередь, выполнена с возможностью передвижения относительно направляющих 4 и 5, расположенных у ее концов. На тележке 1 мостового крана 2 подвешен трос, канат или другие пригодные средства 6 подвеса, содержащие на их конце крюк 7 или другие соответствующие средства. Груз 8 закреплен на крюке 7 посредством строп 7а. Высота подъема li груза считается по местоположению крюка 7. Каждому переменному значению высоты li подъема груза 8 (i 1, 2,) соответствует свое значение периода T колебаний, определяемое по формуле (1):
T=2π(li/q)1/2 (I),
где q ускорение свободного падения.
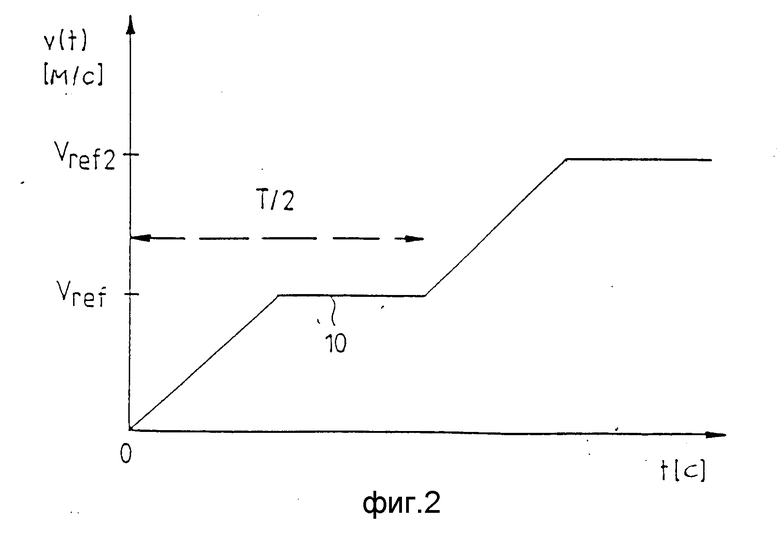
Кран 2 управляется системой управления 13 посредством различных сигналов 10 управления, один из которых показан на фиг. 2. Сигнал 10 управления, изображенный на фиг. 2 это сигнал V(t) скорости, представленный как функция времени t. Сигнал 10 управления предназначен для управления исполнительными органами 11 и 12 передвижения соответственно тележки 1 и мостовой балки 3, несущей тележку 1. В качестве исполнительных органов 11 и 12 могут быть использованы электродвигатели.
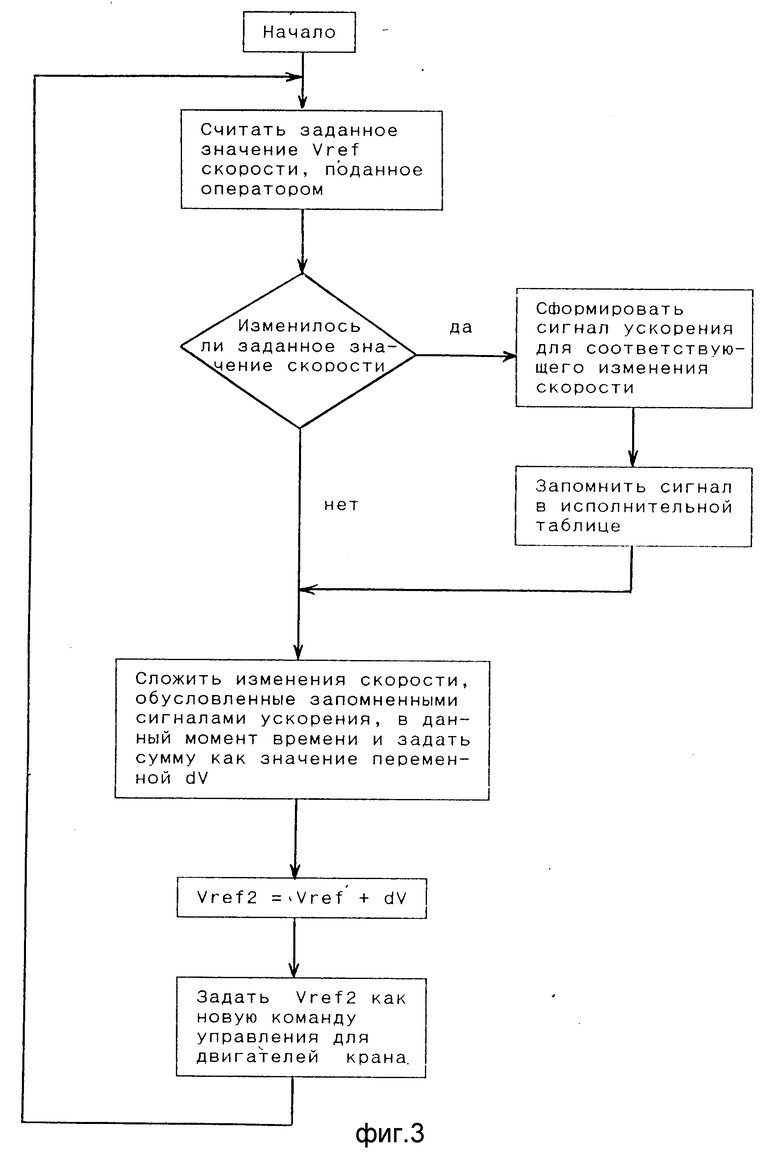
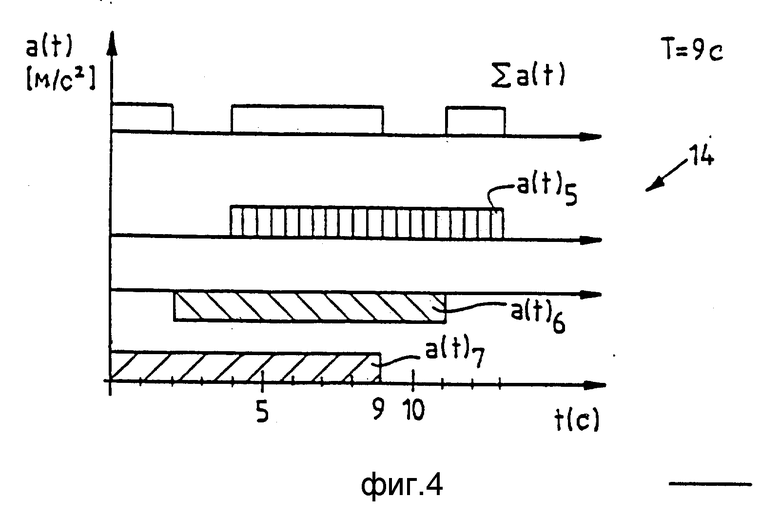
На фиг. 3 изображена блок-схема, поясняющая способ управления краном 2 или подобным устройством согласно настоящему изобретению. Этот способ может быть использован, например, для управления различными кранами, такими как мостовой кран 2, многофункциональный кран или качающийся кран. Оператор крана 2, перемещающего груз 8, подает заданные значения Vref скорости от системы управления 13 к исполнительным органам 11 и 12 в качестве сигналов 10 управления. Заданные значения Vref скорости, подаваемые оператором к исполнительным органам через систему 13 управления, считывают в систему 13 управления с последующим сравнением последнего заданного значения Vref скорости с предыдущим заданным значением скорости; в случае изменения заданного значения скорости формируют сигнал ускорения для соответствующего изменения скорости, после чего результирующий сигнал ускорения запоминают, например, в исполнительной таблице или в другом средстве, имеющемся в системе 13 управления. На фиг. 4 показаны запомненные сигналы a(t)5-7 ускорения и их сумма ∑ a(t) На фиг. 4 период T колебаний груза составляет 9 секунд. Сумма ∑ a(t) сигналов ускорения определяет величину заданного значения Vref2 скорости, направляемого к исполнительным органам 11, 12 крана 2.
В соответствии с фиг. 3, после этого или в случае, когда заданное значение скорости остается неизменным, изменения скорости, обусловленные запомненными сигналами a(t) ускорения в данный момент времени складывают и эту сумму dV прибавляют к предыдущему заданному значению Vref скорости. Полученная в результате сумма дает новое заданное значение Vref2 скорости, устанавливаемое как команда управления и новое заданное значение Vref2 скорости для двигателей или других исполнительных органов 11 и 12 крана 2. Заданное значение Vref2 скорости является командой управления либо для исполнительного органа 11, предназначенного для передвижения тележки 1, либо для исполнительного органа 12, предназначенного для передвижения мостовой балки 3, несущей тележку 1, или для обоих указанных исполнительных органов, в зависимости от того, какую управляющую команду оператор дает в систему управления.
В предпочтительном варианте выполнения настоящего изобретения сигналы a(t) ускорения запоминают в специальной исполнительной таблице 14 или подобном средстве, как показано на фиг. 4. Сигналы a(t)5-7 ускорения, соответствующие выявленным изменениям скорости, запоминают в исполнительной таблице 14. Исполнительную таблицу 14, в которой хранятся несколько сигналов ускорения, просматривают, и изменения скорости, обусловленные запомненными сигналами a(t) ускорения в данный момент времени, суммируют из исполнительной таблицы, при этом сумма изменений скорости в данный момент времени t есть dV.
Согласно предпочтительному варианту выполнения изобретения новое заданное значение Vref2 скорости задают как команду управления на изменение скорости исполнительным органам 11 и 12 крана практически сразу же после формирования нового заданного значения Vref2 скорости, а система 13 управления посылает новое заданное значение Vref2 скорости к крану 2 до окончания сигнала управления, соответствующего предыдущему заданному значению Vref скорости.
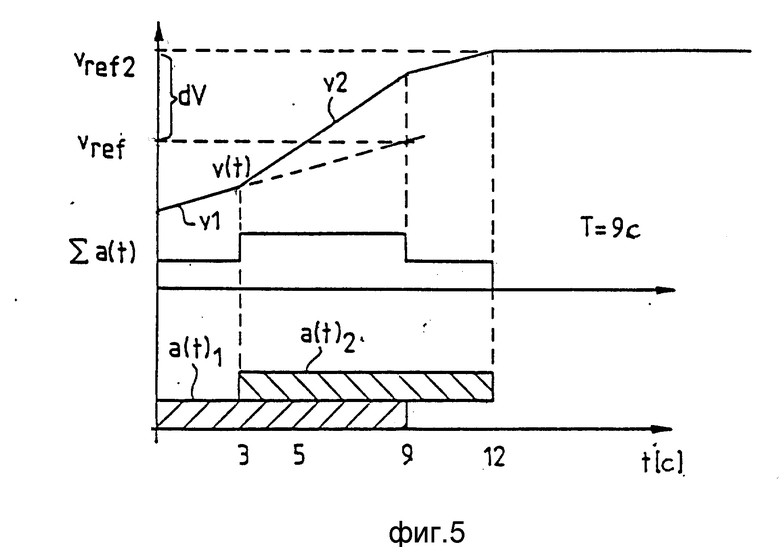
На фиг. 5 показано сложение двух сигналов a(t)1 и a(t)2 ускорения, и сумма ∑ a(t), а также сигнал V(t) скорости, определенный сигналами ускорения. Фиг. 5 иллюстрирует ситуацию, когда груз движется с ускорением со скоростями V1 и V2, изображенными в виде наклонных прямых. Это может означать, что в момент времени t 0 оператор крана подает значение скорости, к которому в соответствии с наклонной прямой V1 стремится скорость при задании скорости Vref. Далее на участке скорости, изображенном наклонной прямой V2, оператор крана удваивает значение скорости в момент времени t 3 секунды. Оба изменения скорости выполняются при одинаковых постоянных импульсах a(t)1-2 ускорения, причем период колебаний математического маятника составляет 9 секунд. Когда импульс ускорения или сигнал a(t)1 ускорения заканчивается в момент времени t 9 секунд, процесс продолжается снова по наклонной прямой, имеющей направление наклонной прямой V1 и параллельной ей, до тех пор пока не закончится импульс ускорения или сигнал a(t)2 ускорения. На фиг. 5 также показано формирование заданного значения Vref2 скорости из начального заданного значения Vref скорости и суммы dV изменений скорости. Ускорение дает результирующую скорость Vref2 без колебаний груза и без необходимости того, чтобы сначала закончился предыдущий сигнал управления.
На фиг. 6 показано сложение двух разнополярных сигналов a(t)3 и a(t)4 ускорения, их сумма ∑ a(t), а также сигнал V(t) скорости, определенный сигналами ускорения. Это может означать, что в момент времени t 0 оператор крана подает значение скорости, к которому в соответствии с наклонной прямой V3 стремится скорость при заданном значении. При t 4 секунды оператор меняет значение скорости, которую следует достичь, до V(t) 0, т.е. оператор хочет остановить кран. Так же, как описано выше, оба изменения скорости выполняются при одинаковых и постоянных импульсах a(t)3-4 ускорения, при этом период колебаний математического маятника составляет t 9 секунд. Ускорение дает конечную скорость, равную нулю, без возникновения колебаний груза и без необходимости ожидания окончания предыдущего сигнала управления.
В вышеприведенном описании термин ускорение предполагает как положительное, так и отрицательное его значение, т.е. ускорение и замедление с противоположным действием.
Для выполнения способа, операции которого представлены на блок-схеме фиг. 3, устройство 13 управления должно содержать средства для подачи команды управления, средства для считывания команды управления, средства для сравнения новой команды управления с предыдущей, средства для формирования сигнала ускорения, средства, например исполнительную таблицу, для хранения сигналов ускорения, средства для суммирования сигналов ускорения и средства для формирования новой команды управления и для подачи команды управления на кран. Блок-схема практически реализованного устройства (не показано) в общих чертах соответствует структуре блок-схемы не фиг. 3. Указанные операции могут быть выполнены, например, с помощью программируемых логических элементов.
Хотя настоящее изобретение было описано выше в виде примеров, иллюстрированных фигурами, очевидно, что изобретение этими примерами не ограничивается, а может быть различным образом модифицировано в рамках идеи изобретения, представленной в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ адаптивного управления мостовым краном | 2020 |
|
RU2744647C1 |
| Способ адаптивного управления мостовым краном | 2024 |
|
RU2830910C1 |
| СПОСОБ ЗАДАНИЯ КРАНОВЩИКОМ РАБОЧЕЙ ЗОНЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2280610C2 |
| СПОСОБ ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2271985C2 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ И СКОРОСТИ ПЕРЕМЕЩЕНИЯ ГРУЗА ПО ТРЕБУЕМОЙ ТРАЕКТОРИИ ГРУЗОПОДЪЕМНЫМ КРАНОМ МОСТОВОГО ТИПА | 2014 |
|
RU2564560C1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ РАСКАЧИВАНИЕМ ГРУЗА, ПОДВЕШЕННОГО НА ПОДЪЕМНОМ УСТРОЙСТВЕ | 2014 |
|
RU2676210C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДЪЕМНЫМ КРАНОМ | 2012 |
|
RU2574047C2 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2309112C1 |
| СПОСОБ НАСТРОЙКИ ПРИБОРА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И РЕАЛИЗУЮЩИЙ ЕГО ПРИБОР БЕЗОПАСНОСТИ | 2005 |
|
RU2307061C1 |
| СПОСОБ СИГНАЛИЗАЦИИ О РАБОТЕ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2004 |
|
RU2276095C2 |
Предметом изобретения является способ управления механизмом горизонтального перемещения подвешенного на гибкой связи грузозахватного органа крана, например, мостовым краном, в котором оператор крана подает от системы управления краном к его исполнительным органам в качестве сигналов управления заданные значения (Vref) скорости, которые считывают в систему управления. Чтобы улучшить управляемость крана, заданное значение (Vref) скорости сравнивают с предыдущим заданным значением скорости и если заданное значение скорости изменилось, то формируют сигнал ускорения для соответствующего изменения скорости, с последующим запоминанием результирующего сигнала ускорения, после чего, если заданное значение скорости осталось неизменным, изменения скорости, обусловленные запомненными сигналами ускорения, в данный момент времени складывают и эту сумму (dV) прибавляют к предыдущему заданному значению (Vref) скорости, причем конечная сумма представляет собой новое заданное значение (Vref2) скорости, которое задают как новую команду управления и новое заданное значение (Vref2) скорости для исполнительных органов крана. 2 з.п. ф-лы, 6 ил.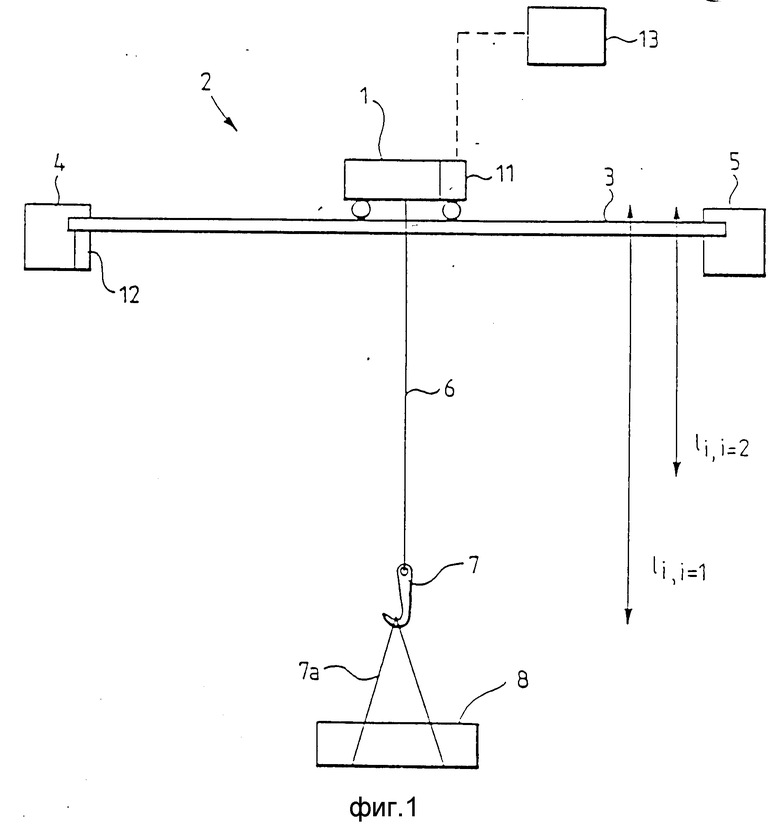
| Патент США N 3517830, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
