Предлагаемое изобретение относится к области управления грузовыми кранами. Рассматривается класс крановых установок, конструкция которых предполагает подвесное крепление груза, в частности - мостовые краны.
Перемещение груза в различных видах промышленности нередко осуществляется с помощью грузоподъемных механизмов. Однако использование кранов сопряжено с колебаниями переносимого груза - явлением, встречающимся на всех типах крановых установках, где используется подвесное крепление груза. Колебания возникают, в основном, во время ускорения или торможения крана, или при воздействии каких-либо внешних возмущений (ветер, неровности пути перемещения крана, перебои в электропитании электропривода и т.д.). Из-за колебаний груза требуется дополнительное время на ожидание успокоение груза перед точной установкой в назначенное место, до 20% рабочего времени [Щедринов А.В., Сериков С.А., В.В. Колмыков. Автоматическая система успокоения колебаний груза для мостового крана. Приборы и системы. Управление, контроль, диагностика. 2007. №8. С. 13-17]. Также колебания транспортируемого груза сопряжены с дополнительными нагрузками на механизмы и металлические конструкции, вследствие чего, повышается усталостный износ крановой системы. Колебания снижают производительность погрузочно-разгрузочных работ, их безопасность, срок службы механизмов крана, повышают энергопотребление.
Исходя из этого, одним из основных направлений в развитии грузоподъемного оборудования является устранение маятниковых колебаний груза, разработка качественно новых и модернизация существующих крановых систем. Очевидно, что более безопасным является тот кран, который является полностью управляемым, не имеющим непроизвольных качений груза. Как и транспортировка груза, гашение маятниковых колебаний осуществляется только за счет перемещения тележки с заданным направлением и ускорением.
Уровень техники
Известен способ управления грузоподъемным краном, нацеленный на гашение маятников колебаний груза [RU 2325317 C1, В66С 13/18, 27.05.2008]. Данный способ включает, в частности, определение положения оборудования крана и управление перемещением крана. Перемещение грузозахватного оборудования реализуется в режиме гашения маятниковых колебаний груза, снижения скорости и перемещения грузозахватного органа с последующим торможением. Этот метод имеет ряд недостатков. К ним относится то, что гашение колебаний груза реализуется за счет снижения скорости и ускорения его перемещения, что снижает производительность. Также в этом методе не учитываются возможные внешние возмущения на крановую установку во время ее работы, например, воздействия ветра на подвешенный груз, неровности подкранового пути, износ приводов крана, следовательно, система управления не способна их парировать.
Известно изобретение [CN 105858481 А, от 17.08.2016]. Данный метод управления краном обеспечивает перемещение груза по заданной траектории до назначенного места, с динамикой движения, позволяющей минимизировать колебания подвешенного груза. Динамика движения тележки крана разбивается на пять временных этапов: разгон тележки до максимальной скорости; передвижение тележки с равномерной максимальной скоростью; этап торможения от максимальной скорости до низкоскоростного режима; этап низкоскоростного перемещения тележки с постоянной скоростью; торможение тележки в конечной точке. Время каждого этапа подбирается в соответствии с параметрами груза и самого крана. Недостатками предложенной системы управления является то, что закон управления требует полную информацию о параметрах переносимого груза и крана, настройка временных интервалов производится только под конкретные параметры установки, и при их изменении необходимо производить дополнительную настройку системы управления. Внешние возмущения на грузоподъемный кран во время перемещения груза не учитываются.
Предложен способ управления мостовым краном за счет использования нейросетевого адаптивного регулятора [CN 108549229 А, от 18.09.2018]. Этот регулятор формирует управляющее воздействия на тележку для ее перемещения и гашения колебаний подвешенного груза. При этом выделяются две задачи управления: точное позиционирование тележки мостового крана и гашение маятниковых колебаний переносимого груза. Это является недостатком, поскольку в процессе перемещения крана по заданной траектории производится гашение колебаний - два противоречивых процесса: один стремиться отклонить груз от вертикали, другой наоборот. От этого снижается не только скорость перемещения груза в назначенное место, но и производительность крана в целом.
Из известных технических решений наиболее близким по совокупности существенных признаков к заявляемому объекту является способ управления грузоподъемным краном [RU 2564560 С1, МПК В66С 13/18, 06.05.2014]. Перед использованием крана формируется требуемая сглаженная траектория перемещения груза в виде временных зависимостей декартовых координат груза в неподвижной системе координат. Требуемая траектория включает в себя задаваемые оператором координаты конечной целевой точки перемещения крюковой обоймы с грузом и определенное количество промежуточных опорных точек.
Бортовое вычислительное устройство по команде оператора формирует сигналы управления приводами механизмов перемещения моста, грузовой тележки крана и подъема/опускания груза, обеспечивая автоматическое приближение координат перемещаемого груза в каждый момент времени к координатам на требуемой траектории, а также уменьшение неуправляемых пространственных перемещений груза как во время перемещения, так и на этапе завершения перемещения в целевой точке. Пространственные маятниковые колебания груза при достижении целевой точки уменьшаются до их полного устранения, а фактическая траектория перемещения груза приближается к требуемой. Степень точности приближения к требуемой траектории определяется оператором через задание максимального значения коэффициента усиления и ограничивается возможностями и быстродействием приводов механизмов крана и их устройств управления.
Недостатком данного метода является то, что для управления движением груза по заданной траектории используется П-регулятор, настройка которого выполняется заранее и справедлива только в узком диапазоне изменений параметров системы управления (широко известное свойство обычного ПИД-управления). Также данная система управления не способна эффективно парировать внешние неконтролируемые возмущения, которые возникают при эксплуатации крана и дестабилизируют положение груза в целевой точке.
Задачей предлагаемого изобретения является повышение эффективности парирования колебаний груза мостового крана при его горизонтальных перемещениях и парирования внешних неконтролируемых возмущений (воздействия ветра, изменения трения перемещения тележки крана и др.), а, следовательно, повышение производительности погрузочно-разгрузочных работ мостовым краном в условиях текущей априорной неопределенности параметров крана и внешних возмущений за счет адаптивной автоматизации управления краном.
Предлагается подход автоматического управления мостовым краном, нацеленный на непосредственное отслеживание горизонтального перемещения груза на заданной высоте в назначенную точку. Подход заменяет решение двух традиционных задач: отслеживание перемещения тележки крана в заданную точку и демпфирование угловых колебаний груза. Кроме того, предлагаемый метод управления основан на схеме адаптивного управления с идентификатором и неявной эталонной моделью с использованием «упрощенных» условий адаптируемости [Круглов С.П. Условия адаптируемости систем управления с идентификатором и эталоном. Монография: LAP LAMBERT Academic Publishing GmbH & Co. KG, Saarbucken, Deutschland. 2012. 125 с.]. Последние сводятся лишь к требованию сходимости невязки идентификации при функционировании алгоритма текущей идентификации и выбору в определенном диапазоне постоянной оценки коэффициента при управлении. Эта оценка выбирается достаточно большой по модулю, чтобы обеспечить наибольший запас устойчивости замкнутой системы управления по амплитуде с обеспечением требуемого качества управления. Для текущей параметрической идентификации предлагается использовать рекуррентный метод наименьших квадратов с фактором забывания. Эталонная модель назначается в виде колебательного звена с собственной частотой, не превышающей таковую для объекта управления с неподвижным основанием и находящуюся в экспериментально установленном диапазоне. Для уточнения собственной частоты эталона требуется оценка длины подвеса груза с точностью не хуже 30%.
Краткое описание чертежей
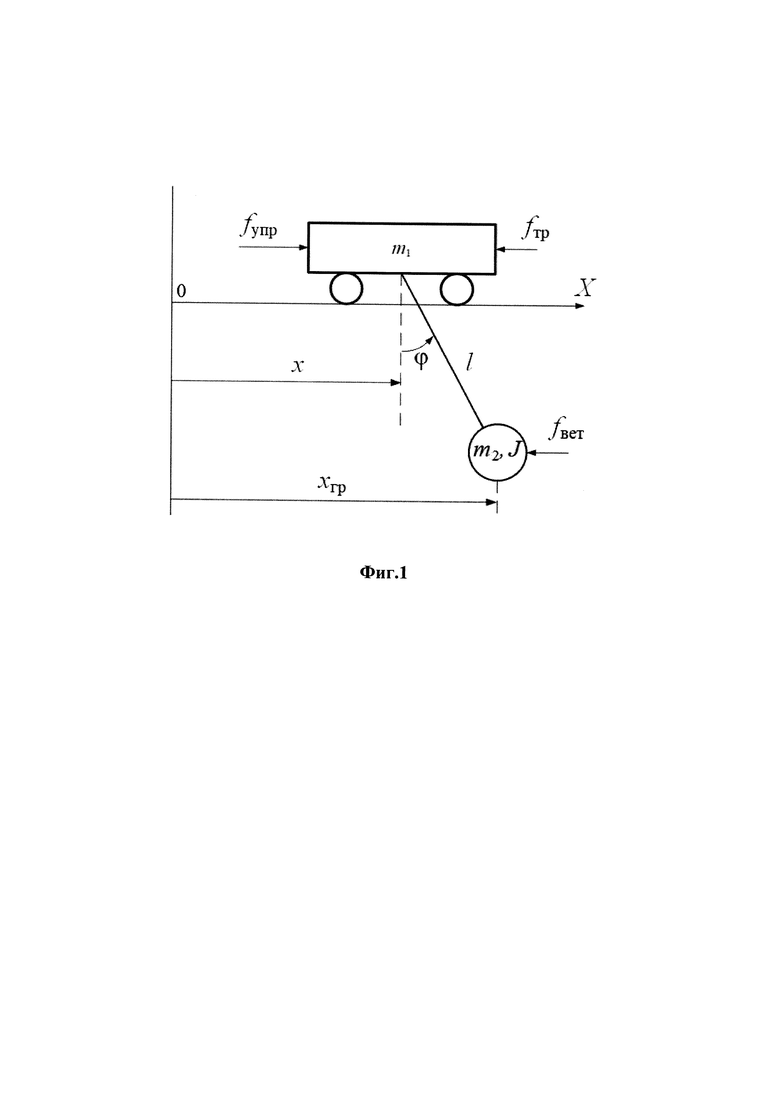
На фиг. 1 представлена схема перемещения мостового крана с грузом по одной оси.
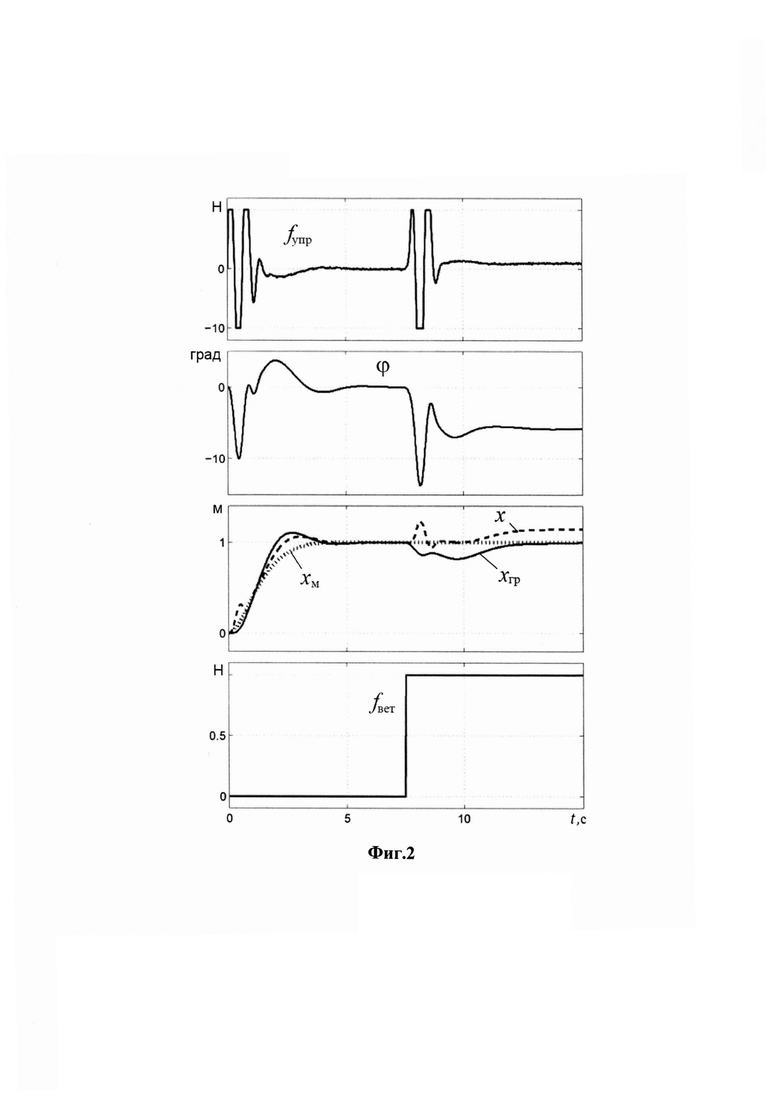
На фиг. 2 представлен результат моделирование процесса управления мостовым краном по одной оси.
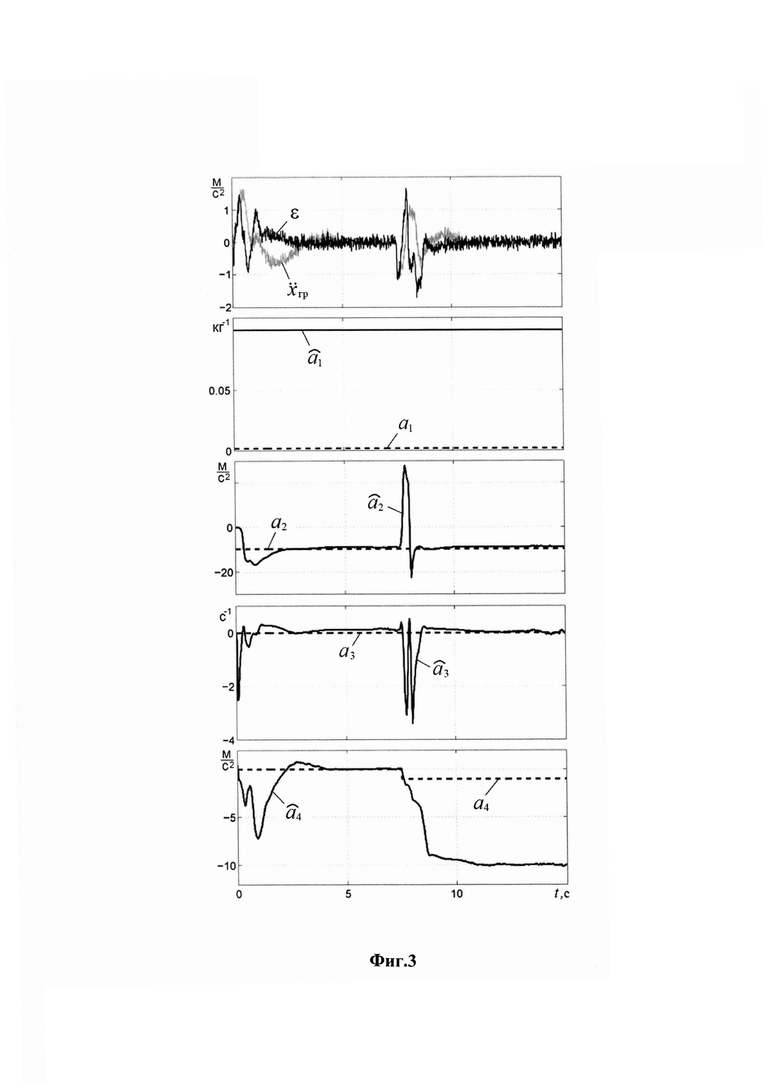
На фиг. 3 представлен процесс текущей идентификации во время управления мостовым краном. Осуществление изобретения
Ниже будем рассматривать движение крана и груза только по одной оси горизонтального перемещения груза (по другой оси - рассуждения аналогичные).
На фиг. 1 и в дальнейших рассуждениях приняты следующие обозначения:
m1, m2 - масса тележки мостового крана и переносимого груза ( - максимальное его значение);
- максимальное его значение);
 - управляющая сила, воздействующая на тележку;
- управляющая сила, воздействующая на тележку;
 - сила вязкого и сухого трения тележки;
- сила вязкого и сухого трения тележки;
J - центральный момент инерции переносимого груза;
 - длина подвесного троса (будем считать
- длина подвесного троса (будем считать  - максимальная длина;
- максимальная длина;
ϕ - угол отклонения троса от вертикальной оси;
x - расстояние, пройденное тележкой;
xгр - расстояние, пройденное грузом в измерении по оси X;
 - сила ветра, воздействующая на груз.
- сила ветра, воздействующая на груз.
Схема движения тележки крана и перемещения груза изображена на фиг. 1. Известно [Черноусько Ф.Л., Ананьевский И.М., Решмин С.А. Методы управления нелинейными механическими системами. М.: Физматлит, 2006. 328 с.], что уравнения поступательного и вращательного движения системы «тележка-груз» без учета массы троса и трения углового движения, в силу их малости, а также начальные значения переменных по положению и скорости, описываются следующей системой уравнений:

где g - ускорение свободного падения; указанные производные переменных взяты по времени (t);  - сила сухого трения; kx - коэффициент вязкого трения поступательного
- сила сухого трения; kx - коэффициент вязкого трения поступательного
перемещения тележки; указанные выше параметры, в общем случае являются переменными и заранее неизвестными (за исключением параметров g, m1,  и
и  )·
)·
Учитывая небольшие углы отклонения груза (типовое значение  ), малую скорость углового перемещения и физику движения, примем следующие упрощения: sin ϕ≈ϕ, cos ϕ≈1,
), малую скорость углового перемещения и физику движения, примем следующие упрощения: sin ϕ≈ϕ, cos ϕ≈1,  С учетом этих упрощений система (1) перепишется относительно переменных
С учетом этих упрощений система (1) перепишется относительно переменных  и хгр в виде:
и хгр в виде:

где 

Приближенное описание динамики движения мостового крана в виде (2) обоснована также применением в системе управления алгоритма текущей идентификации, доставляющего оценки неизвестных параметров, аппроксимирующих модель (2) и (1).
Последнее из равенств (2), на основании первых двух, можно записать в виде:

где 
первый из них назовем параметром эффективности управления.
В силу исходной установки на прямое слежение за перемещением груза, уравнение (3) далее будем считать объектом управления, и использовать его как исходное при синтезе закона управления.
Поскольку динамика объекта управления соответствует колебательному процессу, то в качестве эталонной модели, задающей требуемые характеристики перемещения груза, примем неявную модель в виде колебательного звена со значениями переменных в начальный момент времени, равными соответствующим для исходного объекта:

где хм - переменная, описывающая эталонную динамику движения груза по оси X;  - заданное значение хгр, или целевое место доставки груза; выбираемые параметры эталонной модели:
- заданное значение хгр, или целевое место доставки груза; выбираемые параметры эталонной модели:  - эталонные значения относительного коэффициента затухания и собственной частоты соответственно [Первозванский А.А. Курс теории автоматического управления. Учеб. пособие для вузов. Лань, Санкт-Петербург, 2015. 624 с.].
- эталонные значения относительного коэффициента затухания и собственной частоты соответственно [Первозванский А.А. Курс теории автоматического управления. Учеб. пособие для вузов. Лань, Санкт-Петербург, 2015. 624 с.].
Очевидно, что собственная частота эталонной модели не может быть больше такой же для объекта управления, иначе это противоречит физике движения объекта управления и усложняет управление. В области целевой точки  объект управления близок по свойствам к маятнику с неподвижным основанием, собственная частота которого, что широко известно, есть
объект управления близок по свойствам к маятнику с неподвижным основанием, собственная частота которого, что широко известно, есть  Поэтому примем следующее ограничение:
Поэтому примем следующее ограничение:

где  - ограничение собственной частоты эталонной модели снизу по условиям быстродействия системы управления. Уточнение этой зависимости будет приведено далее.
- ограничение собственной частоты эталонной модели снизу по условиям быстродействия системы управления. Уточнение этой зависимости будет приведено далее.
Отметим, что, если правая часть уравнения (3) описывается в соответствии с назначенным эталоном (4), тогда, в силу принятых условий и (2), поведение объекта будет близко к поведению эталонной модели:

Далее, подставляя в уравнение (3) вместо его левой части правую часть уравнения (6) и заменяя  (это будет обсуждено далее), определяем идеальное управляющее воздействие
(это будет обсуждено далее), определяем идеальное управляющее воздействие  построенное на точных значениях параметров объекта:
построенное на точных значениях параметров объекта:

Полученный закон управления построен при условиях, что параметры объекта управления  известны. Однако, по условию поставленной задачи, они априорно не определены. Для поиска в текущем времени оценок указанных параметров будем использовать алгоритм идентификации (идентификатор). В качестве такового применим рекуррентный метод наименьших квадратов с фактором забывания [Льюнг Л. Идентификация систем. Теория для пользователя: Пер. с англ. / Под ред. Я.З. Цыпкина. М.: Наука, гл. ред. физ. - мат. лит., 1991. 432 с.]:
известны. Однако, по условию поставленной задачи, они априорно не определены. Для поиска в текущем времени оценок указанных параметров будем использовать алгоритм идентификации (идентификатор). В качестве такового применим рекуррентный метод наименьших квадратов с фактором забывания [Льюнг Л. Идентификация систем. Теория для пользователя: Пер. с англ. / Под ред. Я.З. Цыпкина. М.: Наука, гл. ред. физ. - мат. лит., 1991. 432 с.]:
где индекс i=1, 2, 3, … - обозначает дискретные моменты времени с шагом Δt;  - вектор искомых оценок; верхний индекс «т» означает транспонирование;
- вектор искомых оценок; верхний индекс «т» означает транспонирование;  - вектор регрессоров, соответствующий искомым оценкам; εi - невязка идентификации; zi - отклик объекта, в нашем случае это
- вектор регрессоров, соответствующий искомым оценкам; εi - невязка идентификации; zi - отклик объекта, в нашем случае это  - оценка
- оценка  будет определяться по отдельному алгоритму (показано ниже); Pi - матричный (3×3) коэффициент усиления алгоритма; β - назначаемый фактор забывания прошедших измерений для слежения за изменяющимся во времени искомыми параметрами; ϑ - большое положительное число, определяющее начальную скорость изменения оценок параметров; E3 - единичная (3×3) матрица.
будет определяться по отдельному алгоритму (показано ниже); Pi - матричный (3×3) коэффициент усиления алгоритма; β - назначаемый фактор забывания прошедших измерений для слежения за изменяющимся во времени искомыми параметрами; ϑ - большое положительное число, определяющее начальную скорость изменения оценок параметров; E3 - единичная (3×3) матрица.
Предположим, что через малый промежуток времени работы системы невязка идентификации будет близка к нулю  - это характерно для работы используемого алгоритма идентификации [Круглов С.П. Сходимость невязки идентификации в системе управления с параметрической адаптацией // «Информационные технологии и математическое моделирование в управлении сложными системами»: электрон, науч. журн. - 2019. - №1. - С. 27-40 - Режим доступа: http://isinm-irgups.ru/toma/12-2019, свободный. - Загл. с экрана. - Яз. рус, англ. (дата обращения: 18.02.2020).], тогда в соответствии с (8) можно в непрерывном времени записать вместо (3):
- это характерно для работы используемого алгоритма идентификации [Круглов С.П. Сходимость невязки идентификации в системе управления с параметрической адаптацией // «Информационные технологии и математическое моделирование в управлении сложными системами»: электрон, науч. журн. - 2019. - №1. - С. 27-40 - Режим доступа: http://isinm-irgups.ru/toma/12-2019, свободный. - Загл. с экрана. - Яз. рус, англ. (дата обращения: 18.02.2020).], тогда в соответствии с (8) можно в непрерывном времени записать вместо (3):

Это дает возможность строить закон управления, опираясь не на точные значения параметров объекта, а на их текущие оценки. То есть вместо (7) использовать закон управления:

На основании выводов работы [Круглое С.П. Сходимость невязки идентификации в системе управления с параметрической адаптацией // «Информационные технологии и математическое моделирование в управлении сложными системами»: электрон, науч. журн. -2019. - №1. - С. 27-40 - Режим доступа: http://ismm-irgups.ru/toma/12-2019, свободный. - Загл. с экрана. - Яз. рус, англ. (дата обращения: 18.02.2020)], закон управления (10) в условиях, как было указано:  будет выполнять возлагаемые на него функции, если:
будет выполнять возлагаемые на него функции, если:

где  - верхнее ограничение рассматриваемой оценки, которое определяется экспериментально по качеству управления в замкнутой системе управления.
- верхнее ограничение рассматриваемой оценки, которое определяется экспериментально по качеству управления в замкнутой системе управления.
Для выполнения последнего проанализируем значение параметра α1. Из (2) и (3) следует, что:

Из механики известно, что центральный осевой момент груза может быть представлен в виде  где η>0 - коэффициент пропорциональности (обозначим ηmin - минимальное его значение из разновидности переносимых грузов) [Сивухин Д.В. Общий курс физики. М.: Наука, Механика. 1979. Т. 1. 3-е изд. 520 с.]. Тогда можно описать равенство (12) в виде:
где η>0 - коэффициент пропорциональности (обозначим ηmin - минимальное его значение из разновидности переносимых грузов) [Сивухин Д.В. Общий курс физики. М.: Наука, Механика. 1979. Т. 1. 3-е изд. 520 с.]. Тогда можно описать равенство (12) в виде:

Отсюда следует, что минимальному значению параметра  соответствует наибольшая длина подвески и максимальная масса груза с параметром ηmin, а максимальному - близкие к нулевым значениям масса груза и длина подвеса. Поэтому:
соответствует наибольшая длина подвески и максимальная масса груза с параметром ηmin, а максимальному - близкие к нулевым значениям масса груза и длина подвеса. Поэтому:

Полученные границы параметра  (13) всегда можно найти, хотя бы приблизительно, и использовать их для ограничения оценки
(13) всегда можно найти, хотя бы приблизительно, и использовать их для ограничения оценки  при ее выборе.
при ее выборе.
Из опыта исследования адаптивной системы управления (3), (4), (8), (10), установлено (по крайней мере, для рассматриваемого ниже модельного примера), что наилучшее качество адаптивного управления при наибольшем быстродействии обеспечивается в случае, если задавать частоту эталонной модели в отличие от (5) в виде соотношения:

Если назначить:

где  - оценка длины подвеса груза с погрешностью не хуже ±30% от истины, то (14) будет удовлетворять предыдущее соотношение.
- оценка длины подвеса груза с погрешностью не хуже ±30% от истины, то (14) будет удовлетворять предыдущее соотношение.
В силу необходимости знания лишь достаточно приблизительного значения длины подвеса, в качестве ее оценки можно использовать выражение:

где  - начальное значение оценки;
- начальное значение оценки;  - средняя скорость подъема/спуска груза (положительная величина, считается известной); tподъема, tспуска - время подъема или спуска груза соответственно - измеряемые величины (считаем, что подъем и спуск происходит гораздо медленней остальных процессов).
- средняя скорость подъема/спуска груза (положительная величина, считается известной); tподъема, tспуска - время подъема или спуска груза соответственно - измеряемые величины (считаем, что подъем и спуск происходит гораздо медленней остальных процессов).
Замена сигнала  при выводе закона управления (7) и (10) необходима для того, чтобы структура замкнутой системы управления законом (7) или (10) соответствовала структуре объекта управления (3), а также исходных для него зависимостей (2). В противном случае появляется внутренняя неустойчивость. Такая замена не вносит большого рассогласования с введенным эталоном (4), поскольку сигнал
при выводе закона управления (7) и (10) необходима для того, чтобы структура замкнутой системы управления законом (7) или (10) соответствовала структуре объекта управления (3), а также исходных для него зависимостей (2). В противном случае появляется внутренняя неустойчивость. Такая замена не вносит большого рассогласования с введенным эталоном (4), поскольку сигнал  отличается от
отличается от  только угловой составляющей
только угловой составляющей  поэтому эта замена дает отличие только на переходных процессах.
поэтому эта замена дает отличие только на переходных процессах.
Для устранения внутренней неустойчивости многомерного объекта (2) также нужно использовать достаточно большую оценку  что снижает размах управления (10). Это, в свою очередь, соответствует снижению общего коэффициента контура замкнутой системы управления и повышению запаса устойчивости по амплитуде [Курс теории автоматического управления. Учеб. пособие для вузов. Лань, Санкт-Петербург.2015. 624 с.]. Поэтому, на основании (11), с учетом (13), рассматриваемую оценку целесообразно представлять в виде:
что снижает размах управления (10). Это, в свою очередь, соответствует снижению общего коэффициента контура замкнутой системы управления и повышению запаса устойчивости по амплитуде [Курс теории автоматического управления. Учеб. пособие для вузов. Лань, Санкт-Петербург.2015. 624 с.]. Поэтому, на основании (11), с учетом (13), рассматриваемую оценку целесообразно представлять в виде:

и исключать из алгоритма идентификации (8).
На фиг. 3 представлены результаты моделирования в среде Matlab процесса управления тележкой мостового крана с параметрами: m1=2 кг; m2=1 кг; J=0.002 кг⋅м2; 
 Для измерения переменных
Для измерения переменных  предполагается использовать MEMS гироскоп-акселерометр (GY-521, построенный на микромеханическом чипе MPU-6000/MPU-6050, измеряющем угловые скорости и ускорения по трем осям [MPU-6000/MPU-6050 Product Specification. InvenSense, 2013. 54 p. URL: http://www.invensense.com]). Сигнал ϕ - определялся интегрированием измеренного
предполагается использовать MEMS гироскоп-акселерометр (GY-521, построенный на микромеханическом чипе MPU-6000/MPU-6050, измеряющем угловые скорости и ускорения по трем осям [MPU-6000/MPU-6050 Product Specification. InvenSense, 2013. 54 p. URL: http://www.invensense.com]). Сигнал ϕ - определялся интегрированием измеренного Определение переменной x осуществляется по энкодеру, установленному на тележку, а
Определение переменной x осуществляется по энкодеру, установленному на тележку, а - пропусканием сигнала x через реальное дифференцирующее звено с единичным коэффициентом усиления и постоянной времени 0.01 с. В соответствии с этим шумы измерения переменных
- пропусканием сигнала x через реальное дифференцирующее звено с единичным коэффициентом усиления и постоянной времени 0.01 с. В соответствии с этим шумы измерения переменных  и x считались гауссовскими центрированными, со среднеквадратичным отклонением соответственно: 0.05 град/с; 0.1 м/с2; 0.1⋅10-3 м. Параметры эталона (4): ξм=0.9; считаем, что ωΜ удовлетворяет (13) при точной оценке
и x считались гауссовскими центрированными, со среднеквадратичным отклонением соответственно: 0.05 град/с; 0.1 м/с2; 0.1⋅10-3 м. Параметры эталона (4): ξм=0.9; считаем, что ωΜ удовлетворяет (13) при точной оценке  , поэтому ωм=1.28 с-1;
, поэтому ωм=1.28 с-1;  Параметры алгоритма идентификации (8) и закона управления (10): Δt=0.01 с; ϑ=10; β=0.99. Управление фильтруется на апериодическом звене с постоянной времени 0.05 с, моделирующем привод. Также была сформирована задержка при подаче управления на объект величиной 0.01 с. Смоделировано воздействие ветра на подвешенный груз, начинающееся в момент времени 7.5 с и имеющее ступенчатый вид с размахом, пропорциональным массе груза.
Параметры алгоритма идентификации (8) и закона управления (10): Δt=0.01 с; ϑ=10; β=0.99. Управление фильтруется на апериодическом звене с постоянной времени 0.05 с, моделирующем привод. Также была сформирована задержка при подаче управления на объект величиной 0.01 с. Смоделировано воздействие ветра на подвешенный груз, начинающееся в момент времени 7.5 с и имеющее ступенчатый вид с размахом, пропорциональным массе груза.
В результате предварительных исследований системы управления, и на основании соотношений (11), (13) и (16), экспериментально была определена величина  - намного больше истинного значения (см. фиг. 3), она мало зависит от изменения параметров объекта управления.
- намного больше истинного значения (см. фиг. 3), она мало зависит от изменения параметров объекта управления.
Представленный метод управления мостовым краном и результаты исследования указывают на высокую эффективность построения системы управления по предложенному подходу. В конкретных условиях система требует минимальной предварительной настройки, связанной с выбором параметров алгоритма (8), возможного уточнения (14), определения оценки  и наконец, с выбором длины подвеса, соответствующей целевой точке доставки груза. При работе в условиях текущей неопределенности система управления быстро подстраивается под реальные характеристики объекта управления и внешних неконтролируемых возмущений, гасит колебания груза, обеспечивает высокую точность позиционирования груза в заданном положении.
и наконец, с выбором длины подвеса, соответствующей целевой точке доставки груза. При работе в условиях текущей неопределенности система управления быстро подстраивается под реальные характеристики объекта управления и внешних неконтролируемых возмущений, гасит колебания груза, обеспечивает высокую точность позиционирования груза в заданном положении.
Выше было рассмотрена организация адаптивного управления по горизонтальному перемещению груза по одной оси. Точно так же строится система управление горизонтального перемещения груза по другой оси. Также можно отметить, что систему управления можно построить на доступном недорогом оборудовании. Предлагаемый метод может являться основой для создания реальных систем управления кранам любых типов, работающих с подвешенным грузом.
Таким образом, предлагаемый способ адаптивного управления горизонтальным перемещением груза предполагает следующее. Требуются датчики, измеряющие положение подвеса груза, скорость перемещения подвеса груза, отклонения подвеса от вертикали, линейное ускорение груза (крепятся не крюке), а также таймеры, определяющие время подъема и спуска груза. Назначается неявная эталонная модель, отражающая требуемую динамику горизонтального перемещения груза. При этом собственная частота эталона назначается по зависимостям (14) и (15). Требуется априорная информация о кране - это: максимальная длина подвеса, масса тележки крана, а также средняя скорость подъема и опускания груза. Для конкретного крана экспериментально определяется параметр эффективности управления на основании (13) и (16), возможна также корректировка зависимости (14). Во время целевого использования системы управления задается желаемое положение груза, на основе которого, действия алгоритма текущей идентификации (8), доставляющего оценки неизвестных параметров, формируется закон управления (10) по одной оси перемещения груза. По другой оси - аналогично.
Изобретение относится к области управления крановыми установками с подвешенным расположением груза, в частности - мостовыми кранами. Исполнительными механизмами в системе управления краном являются приводы передвижения балки крана, тележки и подъемного механизма. Система управления обеспечивает горизонтальное передвижение груза на заданное расстояние и устранение маятниковых колебаний подвешенного груза, а также обеспечивает работу крана в условиях априорной неопределенности параметров переносимого груза, параметров мостового крана, а также парирование внешних неконтролируемых возмущений. Для текущей параметрической идентификации используется рекуррентный метод наименьших квадратов с фактором забывания. Эталонная модель назначается в виде колебательного звена с собственной частотой, не превышающей таковую для объекта управления с неподвижным основанием, находящуюся в экспериментально установленном диапазоне. Используются датчики: перемещения и скорости тележки крана, угла отклонения подвески груза от вертикали и линейного ускорения груза. Достигается непосредственное отслеживание перемещения груза. 3 ил.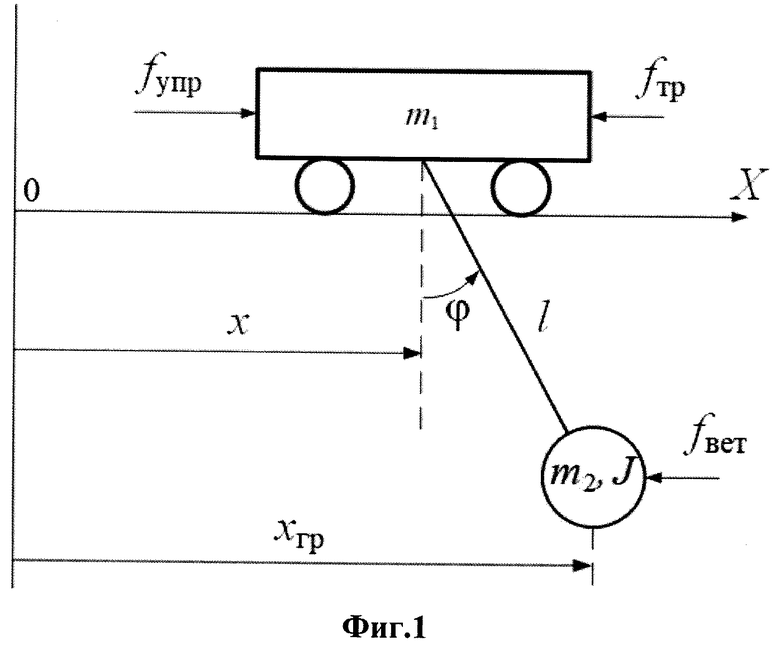
Способ адаптивного управления мостовым краном, заключающийся в том, что до начала перемещения груза задают требуемую траекторию его перемещения, во время перемещения груза при помощи датчиков информации определяют переменные движения крана и груза, на основе обработки их значений формируют управляющие воздействия приводов мостового крана, отличающийся тем, что задаваемую траекторию движения груза формируют в виде неявной эталонной модели с заданным конечным положением груза, к измеряемым переменным дополнительно относят линейные ускорения перемещения груза, а также время подъема и спуска груза, перед использованием крана выбирают два параметра, соответствующих эффективности управления, на основе времени подъема и спуска груза определяют собственную частоту эталонной модели, в процессе управления производят текущую параметрическую идентификацию крановой установки и на ее основе формируют управляющие воздействия приводов крана.
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ И СКОРОСТИ ПЕРЕМЕЩЕНИЯ ГРУЗА ПО ТРЕБУЕМОЙ ТРАЕКТОРИИ ГРУЗОПОДЪЕМНЫМ КРАНОМ МОСТОВОГО ТИПА | 2014 |
|
RU2564560C1 |
| KR 0100722651 B1, 28.05.2007 | |||
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ДВУХЭТАПНЫМ ИДЕНТИФИКАТОРОМ И НЕЯВНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ | 2002 |
|
RU2231819C2 |
| Валок к валковым машинам для переработки полимерных материалов | 1985 |
|
SU1224145A2 |

