Изобретение относится к подъемно-транспортному машиностроению, а именно к устройствам управления и защиты грузоподъемных кранов.
Известны способ и устройство управления и защиты грузоподъемных механизмов, в котором инициирование и останов движения оборудования производится оператором (крановщиком), который производит учет динамики перемещающегося груза интуитивно в соответствии со своей квалификацией. Остановка движения оборудования при срабатывании систем защиты от перегрузки или столкновений с препятствиями производится путем автоматического отключения приводов механизмов либо непосредственно, либо с незначительной выдержкой времени, предназначенной для исключения влияния помех на момент срабатывания систем защиты (Патент Российской федерации 2116240 с приоритетом от 31.03.1997 г.).
Недостатком этих способов и устройств является то, что во время управления краном не учитывается динамика перемещающегося груза и в зависимости от установленного режима и скорости движения могут возникать колебания груза довольно низкой частоты. В отличие от помех отфильтровать эти колебания невозможно, так как для них постоянная времени фильтра имеет значительный уровень (несколько секунд), что недопустимо для срабатывания устройств защиты. Наличие же колебаний груза связано со снижением производительности, энергетическими потерями, а в некоторых случаях со столкновениями и поломкой оборудования.
Целью изобретения является расширение функциональных возможностей способа управления и защиты грузоподъемных кранов за счет создания такого режима управления приводами механизмов крана, при котором обеспечивается гашение колебаний груза как при начале, так и при останове перемещения груза, что приводит к сокращению рабочего цикла.
Цель достигается тем, что в способе управления грузоподъемным краном, заключающемся в том, что путем воздействия на органы управления краном производится запуск и отключение приводов механизмов, перемещающих оборудование крана, путем обработки сигналов датчиков, контролирующих положение подвижного оборудования, производится отключение приводов механизмов по фактору ограничения перемещений, а путем обработки сигналов датчиков, контролирующих положение подвижного оборудования крана и его нагрузку, производится отключение приводов механизмов по фактору перегрузки, для снижения уровня раскачивания груза, вызванного инерционными силами в начале движения и при останове, предусмотрены
установка дополнительного датчика длины каната и переключателя кратности полиспаста, сигналы которых используются для определения высоты подвеса груза и периода раскачивания подвешенного груза;
создание режима и сигналов выбора допустимой скорости движения в зависимости от нагрузки на кран;
создание режима и сигналов предварительного ограничения перемещения по результатам вычисления ограничений по факторам перегрузки и ограничения перемещений, а также по результату вычисления поправки к расстоянию в зависимости от периода раскачивания подвешенного груза;
вычисление по сигналам датчиков, контролирующих положение подвижного оборудования крана, инерционных показателей оборудования, фактических скоростей и ускорений оборудования при запуске и отключении приводов для определения моментов отключения и включения приводов механизмов и создания автоматического режима импульсного управления, зависящего от периода и фазы раскачивания подвешенного груза;
создание режима логической обработки данных, объединения сигналов запуска и сигналов отключения приводов механизмов и подключения их к усилителям, включающим исполнительные механизмы.
Другой целью изобретения является создание надежного устройства оптимального управления для снижения уровня раскачивания груза.
Цель достигается тем, что устройство управления грузоподъемным краном, содержащее блок органов управления движениями, блок усилителей для включения исполнительных механизмов крана и датчики нагрузки, длины стрелы и угла наклона стрелы, выходы которых подключены соответственно к первому, второму и третьему входам блока ограничения нагрузки, при этом выходы датчиков длины стрелы и угла наклона стрелы, а также датчика поворота платформы подключены соответственно к первому, второму и третьему входам блока ограничения перемещения, дополнительно содержит датчик длины каната, выход которого подключен к первому входу блока определения высоты подвеса груза, ко второму входу которого подключен переключатель кратности полиспаста, а выход блока определения высоты подвеса груза подключен к входу блока определения периода раскачивания подвешенного груза;
выходы датчиков длины стрелы и угла наклона стрелы и датчика поворота платформы подключены соответственно к первому, второму и третьему входам блока определения фактических скоростей оборудования, выход которого подключен к входу блока вычисления ускорений, выход которого подключен к первому входу блока задержек при начале движения оборудования крана, ко второму входу которого подключен выход блока определения периода раскачивания подвешенного груза;
выход блока ограничения перемещения подключен к первому входу блока предварительного ограничения, ко второму входу которого подключен выход блока ограничения нагрузки, а к третьему входу подключен выход блока вычисления поправки к расстоянию предварительного ограничения перемещения, вход которого подключен к выходу блока определения периода раскачивания подвешенного груза;
выходы датчиков длины стрелы, угла наклона стрелы и датчика поворота платформы также подключены соответственно к первому, второму и третьему входам блока вычисления инерционных показателей оборудования, выход которого подключен к первому входу блока задержек при останове оборудования крана, ко второму входу которого подключен выход блока определения периода раскачивания подвешенного груза;
выход блока задержек при останове оборудования крана подключен к первому входу блока временного отключения привода при торможении, ко второму входу которого подключен выход блока предварительного ограничения, а выход блока временного отключения привода при торможении подключен к первому входу логической схемы «ИЛИ-НЕ», ко второму входу которой подключен выход блока ограничения нагрузки, а к третьему входу подключен выход блока ограничения перемещения;
при этом выход логической схемы «ИЛИ-НЕ» подключен к первому входу логической схемы «И», ко второму входу которой подключен выход блока временного отключения привода при разгоне, первый вход которого подключен к выходу блока задержек при начале движения оборудования крана, второй вход подключен к выходу блока задержек при останове оборудования крана, а третий вход подключен к выходу блока выбора допустимой скорости движения, первый вход которого подключен к выходу датчика нагрузки, а второй вход подключен к выходу блока органов управления движениями, а
выход логической схемы «И» подключен к входу блоку усилителей, выход которого является выходом устройства и предназначен для включения исполнительных механизмов крана.
Дополнительной целью изобретения является расширение области применения устройства для использования его на различных типах кранов.
Цель достигается тем, что устройство содержит датчик пути, датчик выдвижения тележки и датчик поворота платформы в качестве датчиков, контролирующих положение подвижного оборудования башенных кранов.
На чертеже представлена функциональная схема устройства.
Предлагаемый способ предназначен для обеспечения возможности автоматического управления и защиты крана и груза от столкновений с препятствиями при заданной производительности. Способ предполагает силовое управление (включение в рабочий цикл на этапах разгона и торможения периода временной остановки), обеспечивающее активные меры по снижению динамической погрешности системы (гашению колебаний груза), снижению динамических нагрузок на кран, повышающих безопасность и производительность работ.
После того как оператор начнет инициировать движение крановых механизмов в соответствии с требуемой траекторией перемещения груза, запускается подпрограмма разгона по каждому движению. В рамках этой программы по сигналам датчиков, контролирующих положение оборудования и нагрузку на кран, производится вычисление параметров движения (скорости, ускорения, инерционные показатели) оборудования и осуществляется оптимальное управление с целью минимизации амплитуды раскачивания груза после выхода крана (точки подвеса груза) в режим установившегося движения.
При торможении (в результате воздействия оператора, либо при срабатывании устройств защиты) на базе вычисленных параметров движения осуществляется силовое оптимальное управление также с целью минимизации амплитуды раскачивания груза.
Устройство управления, реализующая описанный способ (фиг.1), содержит группу датчиков, контролирующих положение оборудования крана: для стрелового самоходного крана с телескопической стрелой это датчик длины стрелы 1, угла наклона стрелы 2, угла поворота платформы 3. Для других кранов, например для башенного крана, это соответственно датчик пути, угла наклона стрелы (или перемещения тележки) и угла поворота платформы, что не изменяет сути предлагаемого устройства. Для контроля нагрузки на кран включен датчик нагрузки 4.
Датчики длины стрелы 1, угла наклона стрелы 2 и нагрузки 4 подключены к блоку ограничения нагрузки 5, образуя ограничитель грузоподъемности крана, а датчики длины стрелы 1, угла наклона стрелы 2 и угла поворота платформы 3 подключены к блоку ограничения перемещения 6, образуя систему координатной защиты.
Блок ограничения перемещения 6 подключен к первому входу блока предварительного ограничения 7, предназначенного для создания предварительного сигнала на заданном расстоянии до границы допустимого перемещения. К второму входу блока предварительного ограничения 7 подключен также блок ограничения нагрузки 5 для создания сигнала, предваряющего увеличение вылета (выдвижения тележки) при перегрузке.
Датчики длины стрелы 1, угла наклона стрелы 2 и угла поворота платформы 3 подключены к также к первому, второму и третьему входам блока вычисления инерционных показателей оборудования 8 и первому, второму и третьему входам блока определения фактических скоростей оборудования 9, выход которого подключен к блоку вычисления ускорений 10.
Устройство дополнительно содержит датчик длины каната 11 и переключатель кратности полиспаста 12, подключенные соответственно к первому входу и второму входам блока определения высоты подвеса груза 13, выход которого подключен к блоку определения периода раскачивания подвешенного груза 14. Блок 14 подключен к блоку задержек при начале движения оборудования крана 15 и к блоку задержек при останове оборудования крана 16. Кроме того, блок 14 подключен также к блоку вычисления поправки к расстоянию предварительного ограничения перемещения 17, выход которого подключен к третьему входу блока предварительного ограничения 7.
Блок задержек при останове оборудования крана 16 подключен ко первому входу блока временного отключения привода при торможении 22, ко второму входу которого подключен выход блока предварительного ограничения 7, а выход блока 22 подключен к первому входу логической схемы «ИЛИ-НЕ» 23, ко второму входу которого подключен выход блока ограничения нагрузки 5, а к третьему входу подключен выход блока ограничения перемещения 6. Выход схемы «ИЛИ-НЕ» 23 подключен к первому входу схемы «И» 21, выход которой подключен блоку усилителей 24 для включения исполнительных механизмов крана.
Датчик нагрузки 4 подключен к первому входу блока выбора допустимой скорости движения 19, ко второму входу которого подключен блок органов управления движениями 18.
К первому входу блока временного отключения привода при разгоне 20 подключен блок задержек при начале движения оборудования крана 15, ко второму входу подключен блок задержек при останове оборудования крана 16, а к третьему входу подключен выход блока выбора допустимой скорости движения 19, а выход блока 20 подключен к второму входу логической схемы «И» 21.
Датчики длины стрелы (или пути перемещения крана) 1, угла наклона стрелы (или перемещения тележки по стреле) 2, угла поворота платформы 3 представляют собой датчики перемещения, которые могут быть выполнены на базе контактных потенциометрических преобразователей или на базе индуктивных, кодовых или иных бесконтактных преобразователей.
Датчик нагрузки 4 представляют собой датчик усилия, устанавливаемый в механизм подъема стрелы или в механизм передачи усилия в грузовом канате, или датчики давления, подключаемые к полостям гидроцилиндра подъема стрелы.
Блок ограничения нагрузки 5 и блок ограничения перемещения 6 представляют собой функциональные блоки вычислительного устройства, реализующие функции ограничителя грузоподъемности и устройства координатной защиты соответственно.
В качестве этих датчиков 1, 2, 3, 4 и блоков 5, 6 могут использоваться датчики и блоки комбинированных приборов безопасности: ограничителей грузоподъемности с координатной защитой.
Датчик длины каната 11 представляет собой датчик перемещения, аналогичный датчику длины стрелы 1 и устанавливаемый через редуктор на грузовой лебедке для контроля длины сматывания каната.
Переключатель кратности полиспаста 12 - галетный или электронный переключатель, посредством которого оператор устанавливает значение кратности грузового полиспаста.
Блок органов управления движениями 18 - штатные командоконтроллеры крана, предназначенные для управления движениями.
Блок предварительного ограничения 7 - функциональный блок вычислительного устройства, создающий выходной сигнал отключения при возникновении одного из неравенств:
Qф≥K1Qдоп-δQ или
Rф≥К2Rдоп-δR, где
Qф и Qдоп - соответственно фактическое и допустимое значение грузоподъемности, определяемые блоком 5;
Rф и Rдоп - соответственно фактическое и допустимое значение вылета, определяемые блоком 6;
K1<1 и К2<1 - коэффициенты, устанавливаемые для смещения момента отключения с целью учета погрешности устройства;
δQ и δR - поправки к расстоянию предварительного отключения, определяемые блоком 17.
Блок 17 - функциональный блок вычислительного устройства, предназначенный для вычисления поправки к расстоянию предварительного ограничения перемещения и который вычисляет поправку к расстоянию через скорость оборудования и время, выраженное через доли периода раскачивания.
Блоки 8, 9, 10, 13, 14, 15, 16, 19, 20... функциональные блоки вычислительного устройства.
Блок 8 - предназначен для вычисления инерционных показателей оборудования (момента сопротивления).
Блок 9 - предназначен для вычисления фактических скоростей оборудования (по каждому из движений).
Блок 10 - предназначен для вычисления ускорений (по каждому из движений).
Блок 13 - предназначен для вычисления высоты подвеса груза (расстояния от точки подвеса до центра тяжести груза) h по формуле
h=L/n+С, где
L - длина каната, определяемая датчиком 11,
n - значение кратности полиспаста, установленное переключателем 12,
c - поправка, учитывающая высоту строп и груза.
Блок 14 - предназначен для вычисления периода Т раскачивания подвешенного груза по формуле  , где g - ускорение силы тяжести.
, где g - ускорение силы тяжести.
Блоки 15 и 16 предназначены для вычисления задержек соответственно при начале при останове движения оборудования крана.
Блок 19 предназначен для вычисления в зависимости от сигнала датчика нагрузки 4 допустимой скорости по каждому из движений.
Блоки 20 и 22 предназначены для создания сигналов на временное отключение приводов соответственно при разгоне и при торможении.
Логическая схема «И» 21 и логическая схема «ИЛИ-НЕ» 23 предназначены для создания сигналов управления в соответствии с указанными функциями.
Блок усилителей 24 предназначен для включения штатных исполнительных механизмов крана.
Устройство работает следующим образом.
После подъема груза оператор через блок органов управления 18 дает команду на перемещение груза. При этом по сигналу датчика нагрузки 4 блоком выбора допустимой скорости движения 19 определяется указанная скорость по каждому из выбранных движений. Сигнал блока 19 поступает на вход блока временного отключения привода при разгоне 20, на другом входе которого запрещающий сигнал блока задержек при начале движения оборудования крана 15 отсутствует. Таким образом, сигнал блока 20 поступает на вход логической схемы «И» 21, запуская через блок усилителей 24 соответствующие приводы.
С началом движения сигналы датчиков положения оборудования 1, 2, 3 поступают в блок определения фактических скоростей оборудования 9, с выхода которого сигнал поступает в блок вычисления ускорений 10. Во время разгона, когда ускорение а>0, канат отклоняется от вертикального положения в сторону, противоположную движению, а блок вычисления ускорений 10 не создает сигнала, запрещающего разгон.
В момент, когда ускорение становится равным 0 (а=0), блок вычисления ускорений 10. создает сигнал в блок задержек 15 на временное отключение привода. Время отключения определяется по сигналу блока определения периода раскачивания подвешенного груза 14, получающего сигнал блока определения высоты подвеса груза 13, которая определяется по сигналу датчика длины каната 11 и переключателя кратности полиспаста 12.
Через время τ1=k1T (где Т - период раскачивания, k1 - установленный для а=0 коэффициент) канат примет вертикальное положение и в этот момент блокируется сигнал на отключение привода. Движение точки подвеса каната и груза продолжится при вертикальном положении каната (без раскачивания), так как скорость груза в точке равновесия (нижней точке подвеса) равна достигнутой при разгоне скорости точки подвеса каната.
Останов движения может происходить без участия оператора в результате срабатывания блока ограничения нагрузки 5 или блока ограничения перемещения 6, сигналы которых с передаются на вход логической схемы «ИЛИ-НЕ» 23 и в виде логического «0» поступают на вход логической схемы «И» 21, которая блокирует сигнал движения от органов управления 18.
Для того чтобы избежать раскачивания груза, сигналы блоков 5 и 6 подаются соответственно на первый и второй входы блока предварительного ограничения 7, который создает сигнал отключения на некотором расстоянии до границы допустимого перемещения или допустимого вылета, т.е. ранее сигналов блоков 5 и 6. Кроме того, на третий вход блока 7 подается также сигнал блока вычисления поправки к расстоянию предварительного ограничения перемещения 17. Блок 17 вычисляет поправку к расстоянию через скорость оборудования и время, выраженное через доли периода раскачивания.
Сигнал блока 7 поступает на второй вход блока временного отключения привода при торможении 22, к первому входу которого подключен блок задержек при останове оборудования крана 16. Время задержки определяется как τ2=k2T, где Т - период раскачивания, a k2 - коэффициент по сигналу блока вычисления инерционных показателей оборудования 8, который, в свою очередь, определяется по положению оборудования и сигналам датчиков 1, 2, 3. Отключающий сигнал блока 22 поступает на первый вход логической схемы «ИЛИ-НЕ» 23, с выхода которой сигнал (в виде логического «0») передается на вход логической схемы «И» 21, которая блокирует работу блока усилителей 24.
Таким образом, на расчетном расстоянии блоком 7 создается предварительный сигнал на отключение, действие которого продолжается расчетное время τ2, определяемое блоком задержек при останове оборудования крана 16. Через время τ2, когда груз отклонится вперед по движению, сигнал блока 22 прекращается, включается привод механизмов и точка подвеса каната начинает «догонять» груз, уменьшая расстояние между вертикалью, проходящей через точку подвеса каната, и грузом, запас потенциальной энергии груза и уменьшая тем самым амплитуду раскачивания. Прекращение движения происходит после поступления сигналов блоков 5 или 6.
В случае остановки движения оператором, последний совершает манипуляции блоком органов управления 18, алгоритм которых аналогичен алгоритму автоматической остановки, по сигналу блока предварительного ограничения 7. Оператор воздействует на органы управления 18, предварительно останавливая движение, а затем его возобновляя. Для того чтобы возобновление движения не происходило преждевременно, на вход блока временного отключения привода при разгоне 20 подается сигнал блока задержек при останове оборудования крана 16.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УМЕНЬШЕНИЯ РАСКАЧИВАНИЯ ГРУЗА ПРИ ПОДЪЕМЕ СТРЕЛОВЫМ КРАНОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2422354C1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ | 2010 |
|
RU2440924C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ РАСКАЧИВАНИЯ ПРИ ПОДЪЕМЕ ГРУЗА ГРУЗОПОДЪЕМНЫМ КРАНОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2312814C1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2325317C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ РАСКАЧИВАНИЯ ГРУЗА НА ГИБКОМ ПОДВЕСЕ (ВАРИАНТЫ) | 2009 |
|
RU2406679C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕЩЕНИЯ С ОГРАНИЧЕНИЕМ ПО РАСКАЧИВАНИЮ ГРУЗА | 2015 |
|
RU2596008C1 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2006 |
|
RU2316467C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ И СКОРОСТИ ПЕРЕМЕЩЕНИЯ ГРУЗА ПО ТРЕБУЕМОЙ ТРАЕКТОРИИ ГРУЗОПОДЪЕМНЫМ КРАНОМ МОСТОВОГО ТИПА | 2014 |
|
RU2564560C1 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА СТРЕЛОВОГО ТИПА С МАНЕВРОВОЙ СТРЕЛОЙ | 2006 |
|
RU2319656C1 |
| СИСТЕМА БЕЗОПАСНОСТИ КРАНА СТРЕЛОВОГО ТИПА | 2006 |
|
RU2314248C1 |
Изобретение предназначено для обеспечения возможности автоматического управления и защиты крана и груза от столкновений с препятствиями при заданной производительности. Способ заключается в том, что путем воздействия на органы управления краном производится запуск и отключение приводов механизмов, перемещающих оборудование крана, а путем обработки сигналов датчиков производится отключение приводов механизмов по фактору ограничения перемещений либо по фактору перегрузки. Для снижения уровня раскачивания груза устанавливаются дополнительные датчик длины каната и переключателя кратности полиспаста, сигналы которых используются для определения высоты подвеса груза и периода раскачивания подвешенного груза. Вычисляют по сигналам датчиков, контролирующих положение подвижного оборудования крана, инерционных показателей оборудования, фактических скоростей и ускорений оборудования при запуске и отключении приводов для определения моментов отключения и включения приводов механизмов. Создается режим управления приводами механизмов крана, при котором обеспечивается гашение колебаний груза как при начале, так и при останове перемещения груза. Устройство содержит блок управления движениями, блок усилителей, датчики, блок ограничения нагрузки, блок ограничения перемещения, блока определения высоты подвеса груза, блок определения периода раскачивания подвешенного груза, исполнительные механизмы крана. Техническим результатом изобретения является повышение надежности. 2 н. и 1 з.п. ф-лы, 1 ил.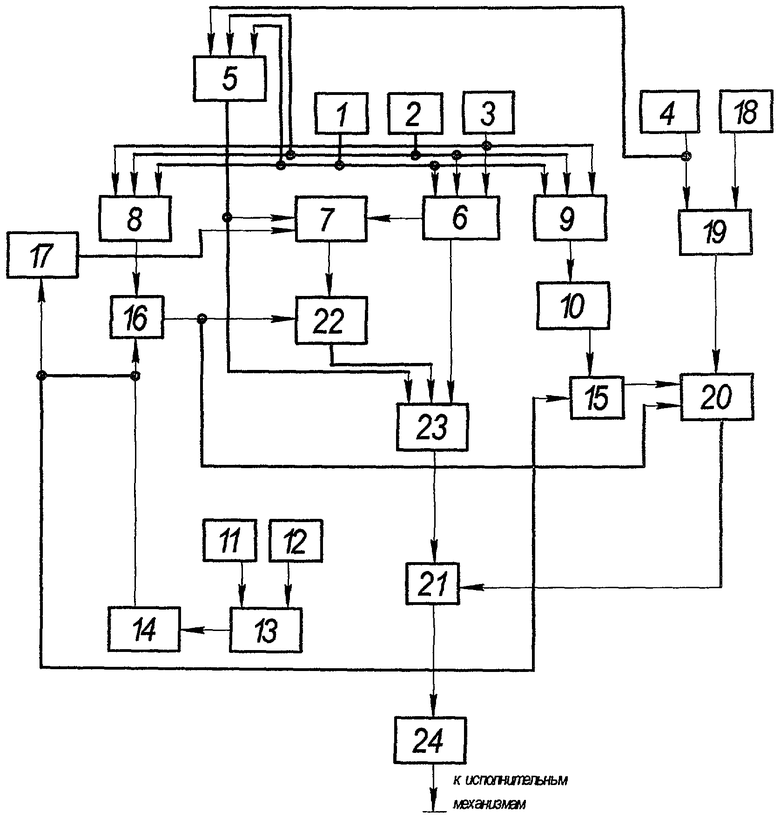
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМИ МЕХАНИЗМАМИ С ФИКСАЦИЕЙ ИХ ХАРАКТЕРИСТИК И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2116240C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ СИЛ | 1997 |
|
RU2133453C1 |
| СПОСОБ ОГРАНИЧЕНИЯ ПАРАМЕТРОВ РАБОТЫ УСТРОЙСТВА | 2003 |
|
RU2255894C2 |
| US 5823369 А, 20.10.1998 | |||
| КРАН С СИСТЕМОЙ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1994 |
|
RU2090486C1 |
| RU 2004125713 А, 10.03.2005 | |||
| Способ приготовления препарата анабазина для целей борьбы с вредителями сельского хозяйства | 1935 |
|
SU47865A1 |

