Изобретение относится к области машиностроения и может быть использовано преимущественно для повышения точности и скорости перемещения груза краном мостового типа по требуемой траектории, уменьшения отклонения фактических координат груза относительно координат требуемой траектории в каждый момент времени перемещений.
Известен способ для управления отклонением крюка [RU 2506221 C2, B66C 23/88, 10.02.2014]. При управлении качанием крюка мобильного крана с поворотной платформой для регулирования угла отклонения крюка крана с телескопической стрелой при помощи датчика определяют угол отклонения и направление качания троса, который соединен с крюком, в горизонтальной плоскости по отношению к направлению силы тяжести, причем угол отклонения является поперечным углом отклонения (измеряется датчиком в направлении, перпендикулярном плоскости подъема стрелы). Определяют превышение углом отклонения заданного значения. Если угол отклонения больше, чем заданное значение, вращают поворотный стол (поворотную платформу мобильного крана) в направлении качания и измеряют скорость вращения и угловое ускорение поворотного стола. Сравнивают измеренные датчиками значения скорости вращения и углового ускорения поворотного стола с разрешенными стандартными значениями скорости вращения и углового ускорения и при превышении соответственно уменьшают их. Аналогичным образом управляют качанием крюка в плоскости подъема стрелы. Угол отклонения сложного раскачивания может быть разделен на продольный угол отклонения и поперечный угол отклонения и управляться способами для управления качанием крюка в описанных выше вариантах осуществления известного способа раздельно или одновременно, так что сложное пространственное качание крюка может быть стабилизировано или устранено.
Этот способ не может быть использован для повышения точности и скорости перемещения груза по требуемой траектории грузоподъемным краном мостового типа, поскольку он разработан для крана с поворотной платформой и телескопической стрелой и использует соответствующие измеряемые датчиками информационные параметры (углы отклонения грузового каната в вертикальных плоскостях, параллельных и перпендикулярных плоскости подъема стрелы) для выработки компенсирующих управляющих воздействий и приводы поворотного стола крана и стрелы для их осуществления. У мобильных кранов с телескопической стрелой при подъеме груза, лежащего на опорной поверхности, возникает значительный упругий прогиб стрелы, изменяющий вылет и способный вызывать маятниковые колебания груза, в то время как кранам мостового типа данная проблема не свойственна из-за их конструкции. Способ не учитывает требуемые и фактические координаты расположения груза в пространстве в текущий момент времени, то есть выполняется только гашение маятниковых колебаний крюка с грузом, но при этом не отслеживаются и не контролируются ни текущие, ни конечные фактические координаты груза в пространстве, которые вследствие указанных причин могут отличаться от заданных (требуемых промежуточных и требуемых целевых) координат. Фактическая траектория перемещения груза по этим причинам также может отличаться от требуемой. Это предопределяет необходимость вмешательства человека-оператора в управление приводами перемещения механизмов крана, снижает производительность.
Точка подвеса крюка и груза (оголовок телескопической стрелы) согласно этому способу, поворотом поворотного стола и/или подъемом/опусканием стрелы крана автоматически перемещается в направлении качания, т.е. в направлении отклонения крюка от гравитационной вертикали, чтобы компенсировать, т.е. уменьшить это отклонение. Однако при подобном смещении точки подвеса равновесное положение крюка и груза (находящееся на линии гравитационной вертикали под точкой подвеса) также смещается одновременно с гашением колебаний. При этом, учитывая сложный характер маятниковых пространственных колебаний крюка и груза, новое равновесное положение крюка и груза, в которое автоматически переместится точка подвеса, будет отличаться от заданного или целевого. Для достижения последнего человеку-оператору потребуется осуществить еще одно или несколько перемещений точки подвеса и груза, которые, в свою очередь, вызовут новые маятниковые пространственные колебания крюка и груза. То есть, способу свойственен недостаток снижения как точности, так и средней скорости работы крана (увеличения времени его рабочего цикла) из-за того, что не учитываются требуемые и фактические координаты расположения груза в пространстве в текущий момент времени, а компенсируются только углы отклонения крюка и каната от гравитационной вертикали.
Из известных технических решений наиболее близким по совокупности существенных признаков к заявляемому объекту является способ управления грузоподъемным краном [RU 2325317 C1, B66C 13/18, 27.05.2008]. Он включает определение положения оборудования крана, инициирование оператором движений оборудования крана и отключение приводов оборудования крана при перегрузке. До определения положения оборудования крана запоминают координаты препятствий на стройплощадке. В памяти процессора формируют контуры препятствий и отображают их на дисплее, а по сигналам датчиков положения оборудования крана определяют координаты начального положения грузозахватного органа, задают координаты конечного положения грузозахватного органа, запоминают и отображают их на дисплее. При инициировании крановщиком движений оборудования крана определяют прогнозируемую траекторию перемещения грузозахватного органа и отображают ее на дисплее. При отсутствии пересечения контуров определяют направления независимых движений оборудования крана, каждого в отдельности, для доставки грузозахватного органа в конечную точку по кратчайшему пути за минимальное время, а при пересечении контуров препятствий прогнозируемой траекторией перемещения грузозахватного органа определяют оптимальную траекторию, запоминают и отображают ее на дисплее. Перемещение грузозахватного органа осуществляют в режимах гашения раскачивания груза, снижения скорости перемещения грузозахватного органа с последующим торможением и остановом движений.
Однако известный способ обладает следующими недостатками: перемещение грузозахватного органа осуществляют в режимах гашения раскачивания груза и снижения скорости перемещения. Каким именно образом осуществляется режим гашения раскачивания груза при его перемещении, не оговаривается, однако гашение раскачивания в любом случае заключается в уменьшении максимальных значений угла отклонения грузозахватного органа крана и грузовых канатов от гравитационной вертикали, недопущении превышения этим углом отклонения малых предельных значений. Такое уменьшение угла отклонения канатов при перемещении груза на свободном и гибком канатном подвесе, согласно динамике маятниковых колебаний, возможно только при уменьшении скоростей и ускорений перемещения, то есть при увеличении общего времени перемещения звеньев крана и груза. Гашение колебаний груза целесообразно при приближении грузозахватного органа к точке его доставки, то есть на конечном участке траектории и непосредственно при достижении целевой точки доставки. В то же время в известном способе режим гашения колебаний груза не только на конечном участке, а в процессе всего перемещения на гибком канатном подвесе, включающий в себя постоянное уменьшение угла отклонения грузового каната от гравитационной вертикали, неизбежно вызывает снижение скорости и производительности крана.
Задачей изобретения является разработка способа оперативного повышения точности и скорости перемещения груза грузоподъемным краном мостового типа с гибким канатным подвесом по требуемой траектории и уменьшения неуправляемых пространственных перемещений груза, обеспечивающего: - приближение фактической траектории перемещения груза грузоподъемным краном мостового типа к требуемой траектории; - уменьшение неуправляемых пространственных перемещений груза и повышение за счет этого скорости перемещения и производительности работы крана (уменьшение длительности его рабочего цикла). Дополнительными техническими результатами являются: - повышение безопасности работы крана за счет уменьшения отклонений груза от требуемой траектории перемещения и снижения за счет этого вероятности его столкновения с посторонними объектами и препятствиями (в т.ч. с персоналом и имуществом), находящимися вне требуемой траектории перемещения; - уменьшение неуправляемых пространственных перемещений груза, возникающих под воздействием внешних случайных (ветровых) нагрузок.
Указанные технические результаты достигаются тем, что путем воздействия на органы управления краном в автоматическом режиме формируют сигналы управления приводами механизмов перемещения моста и грузовой тележки крана (т.е. перемещения точки подвеса груза) на основе предложенных математических выражений, использующих значения как текущих требуемых, так и текущих фактических декартовых координат положения груза в пространстве. Основа заявляемого способа заключается не в уменьшении углов отклонения подвеса от гравитационной вертикали как таковых в процессе перемещения груза, а в управлении ими путем оперативного формирования закона движения точки подвеса с целью приближения фактической траектории движения груза к требуемой. В то же время заявляемый способ позволяет снижать скорости перемещения груза при приближении к целевой точке, что позволит гасить маятниковые колебания груза, используя для этого только перемещения точки подвеса и одновременно стабилизируя положение груза в целевой точке.
Для этого подвижные элементы крана оснащаются датчиками, измеряющими фактические текущие декартовы координаты положения крюковой обоймы с грузом в пространстве.
Сущность изобретения поясняется нижеследующим описанием и прилагаемой к нему фиг. 1, где приведена блок-схема алгоритма осуществления способа при постоянной длине грузового каната крана во время перемещения груза.
Заявляемый способ заключается в следующем. Он основан на физической зависимости - придания ускорения грузу в горизонтальной плоскости (в плане) в направлении расположения проекции точки подвеса на горизонтальную плоскость, если координаты точки подвеса не совпадают с координатами центра масс крюковой обоймы с грузом (имеется угол отклонения грузовых канатов от гравитационной вертикали). Очевидно, что ускорение будет тем большим, чем больше угол отклонения канатов от гравитационной вертикали, связанный через выражение l·sinθ (l - длина грузового каната крана от точки подвеса до точки центра масс крюковой обоймы с грузом; θ - угол отклонения грузовых канатов крана от гравитационной вертикали) с расстоянием в плане между проекциями точки центра масс крюковой обоймы с грузом и точки подвеса на горизонтальную плоскость. Если груз в каждый текущий момент времени находится в точке координат требуемой траектории или достаточно близко к ней, то наличие угла отклонения грузовых канатов крана от гравитационной вертикали не представляет опасности и его предельное (максимальное) значение может быть увеличено в несколько раз по сравнению с известными способами, достигая 20-40 угловых градусов. Указанное увеличение предельного значения угла отклонения позволяет повысить скорость и уменьшить время перемещения груза, поскольку больший угол отклонения канатов позволяет придавать грузу большие ускорения перемещения, обеспечивая его перемещение по требуемой криволинейной траектории с большей точностью и одновременно за меньшее время.
При отработке требуемой траектории перемещения груза, которая задана в виде временных зависимостей его декартовых координат в неподвижной системе отсчета, закон управляющего воздействия по координатным компонентам вдоль горизонтальных осей x1 и x2 в виде координат точки подвеса в плане xП1, xП2 будет задаваться следующими выражениями:
xП1(t)=xТР1(t)+(xТР1(t)-xГР1(t))·kУ; xП2(t)=xТР2(t)+(xТР2(t)-xГР2(t))·kУ,
где xТР1, xТР2 - декартовы координаты точки на траектории, в которой в момент времени t должен находиться центр масс крюковой обоймы с грузом (требуемые координаты груза в плане); xГР1 xГР2 - фактические координаты груза в плане в момент времени t, измеряемые при помощи датчиков; kУ - коэффициент усиления управляющего отклонения точки подвеса относительно рассогласования фактического и требуемого положений груза в плане.
При этом координата точки подвеса xП1 будет соответствовать перемещению моста крана, а координата xП2 - перемещению грузовой тележки крана вдоль моста. Вычисляемые в режиме реального времени зависимости xП1(t), xП2(t) используются для компенсирующего управления приводами подвижных элементов крана - моста и грузовой тележки соответственно. При этом в качестве сигналов отрицательной обратной связи для повышения точности траектории используются сигналы датчиков, измеряющих фактические координаты груза, а также линейные перемещения моста крана и грузовой тележки относительно моста.
Коэффициент усиления управляющего отклонения kУ принимает определенные значения, при этом большим значениям kУ будет соответствовать большая точность реализации требуемой траектории при одновременном увеличении скоростей и ускорений точки подвеса, развиваемых приводами мостового крана. Целесообразно использовать диапазон изменения значений коэффициента усиления kУ от 0 до 50 со средними значениями порядка 5…15. Большие значения kУ целесообразно использовать при большей длине грузового каната l. Длина грузового каната l может при этом меняться произвольным образом согласно любой заданной отдельно зависимости. В результате положение груза в каждый момент времени перемещения будет приближаться к требуемой траектории, отклонение фактической траектории от требуемой будет автоматически уменьшено, а в случае неподвижности точки требуемого положения груза во времени (например, после достижения целевой точки на требуемой траектории) будет происходить автоматическое уменьшение (гашение) маятниковых колебаний груза до полного их устранения, причем положение равновесия при отсутствии колебаний будет совпадать с целевым положением груза.
Компенсирующее управление реализуется с учетом предельно допустимых значений параметров и ограничений на работу приводов, ограничений по допустимым нагрузкам крана в целом и его отдельных механизмов, а также информации о статических и динамических параметрах крана, массе перемещаемого груза, предварительно введенных в бортовое вычислительное устройство. Для этого в выражении изменяется значение коэффициента усиления управляющего отклонения kУ. В процессе движения груза бортовое вычислительное устройство, с использованием выходных сигналов датчиков, в реальном режиме времени отслеживает текущее пространственное положение груза, моста и грузовой тележки и осуществляет изменение сигналов управления приводами моста и грузовой тележки, обеспечивая безопасное и быстрое перемещение груза по требуемой траектории.
Реализация заявляемого способа включает в себя следующие этапы:
а) Грузозахватный орган (крюковая обойма) под управлением оператора подводится к грузу, проводится его строповка и минимально возможное натяжение грузового каната и строп без отрыва груза от опорной поверхности.
б) По данным датчика датчиков, измеряющих фактические координаты крюковой обоймы с грузом, определяются начальные координаты крюковой обоймы с грузом, которые заносятся в бортовое вычислительное устройство.
в) Формируется требуемая сглаженная траектория перемещения груза в виде временных зависимостей декартовых координат груза в неподвижной системе координат. Требуемая траектория включает в себя задаваемые оператором координаты конечной целевой точки перемещения крюковой обоймы с грузом и определенное количество промежуточных опорных точек. Требуемая траектория характеризуется, помимо геометрических координат начальной, промежуточных опорных и целевой точек, также временем перемещения груза, задаваемым в пределах, которые способны реализовать приводы используемой конструкции крана и их устройства управления.
г) Бортовое вычислительное устройство по команде оператора формирует сигналы управления приводами механизмов перемещения моста, грузовой тележки крана и подъема/опускания груза, обеспечивая согласно приведенным выше выражениям автоматическое приближение координат перемещаемого груза в каждый момент времени к координатам на требуемой траектории, а также уменьшение неуправляемых пространственных перемещений груза как во время перемещения, так и на этапе завершения перемещения и в целевой точке.
В результате пространственные маятниковые колебания груза при достижении целевой точки уменьшаются до их полного устранения, а фактическая траектория перемещения груза приближается к требуемой. Степень точности приближения фактической траектории груза к требуемой будет определяться требованиями оператора через задание максимального значения коэффициента усиления kУ и ограничиваться возможностями и быстродействием приводов механизмов крана и их устройств управления.
Использование новых операций: задания требуемых временных зависимостей изменения координат груза в пространстве, измерения при помощи датчиков фактических декартовых координат груза в пространстве и сравнения их с требуемыми координатами груза в каждый момент времени, вычисления по предложенным выражениям координат точки подвеса груза, позволяет в реальном режиме времени вычислять управляющие воздействия на приводы моста и грузовой тележки крана с целью приближения фактической траектории движения груза к требуемой и гашения колебаний груза на этапе завершения перемещения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕДОТВРАЩЕНИЯ РАСКАЧИВАНИЯ ГРУЗА НА ГИБКОМ ПОДВЕСЕ (ВАРИАНТЫ) | 2009 |
|
RU2406679C2 |
| КРАН | 2017 |
|
RU2734966C2 |
| Способ адаптивного управления мостовым краном | 2020 |
|
RU2744647C1 |
| КРАН И СПОСОБ УПРАВЛЕНИЯ ТАКИМ КРАНОМ | 2017 |
|
RU2728315C2 |
| Способ адаптивного управления мостовым краном | 2024 |
|
RU2830910C1 |
| САМОХОДНЫЙ ДВУХСТРЕЛОВОЙ КРАН | 2011 |
|
RU2465191C2 |
| Способ управления мостовым краном на основе скоростного ПД-регулятора | 2024 |
|
RU2829659C1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2325317C1 |
| Устройство для гашения колебаний грузовой подвески крана | 1975 |
|
SU587085A1 |
| УСТРОЙСТВО ДЛЯ ГАШЕНИЯ КОЛЕБАНИЙ ГРУЗА, ПОДВЕШЕННОГО НА КАНАТЕ СТРОИТЕЛЬНОГО КРАНА | 2004 |
|
RU2280607C2 |
Изобретение относится к области повышения эффективности и обеспечения безопасности эксплуатации грузоподъемных кранов мостового типа. Для повышения точности и скорости перемещения груза по требуемой траектории грузоподъемным краном мостового типа и компенсации неуправляемых пространственных перемещений груза задают требуемые временные зависимости изменения координат груза в пространстве. В каждый момент времени после начала перемещения датчики измеряют фактические текущие декартовы координаты груза. Бортовое вычислительное устройство крана производит сравнение фактических координат груза с требуемыми координатами груза в каждый момент времени, обрабатывает значения фактических и требуемых координат при помощи предложенных выражений. Устройство вычисляет и формирует управляющие воздействия на приводы моста и грузовой тележки крана. Приводы крана перемещают точку подвеса груза в горизонтальных направлениях, противоположных отклонениям фактических координат груза относительно координат точки требуемой траектории. Достигается приближение фактической траектории перемещения груза к требуемой, повышение производительности. 1 ил.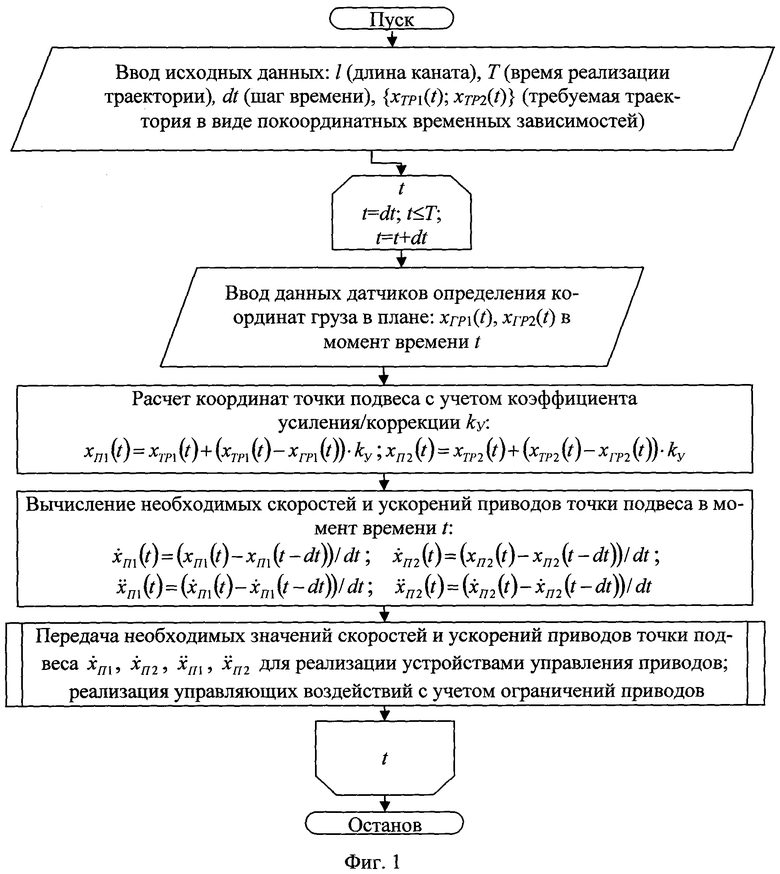
Способ повышения точности и скорости перемещения груза по требуемой траектории грузоподъемным краном мостового типа, заключающийся в том, что до начала перемещения груза задается требуемая траектория его перемещения, во время перемещения груза при помощи датчиков, установленных на грузоподъемном кране, измеряют фактические текущие значения декартовых координат груза в пространстве, и на основе обработки их значений вычисляются и формируются управляющие воздействия на приводы моста и грузовой тележки крана с целью повышения точности и скорости перемещения груза по требуемой траектории, отличающийся тем, что требуемую траекторию перемещения груза задают в виде временных зависимостей декартовых координат груза, при перемещении груза точка его подвеса смещается приводами крана в горизонтальных направлениях, противоположных отклонениям фактических координат груза относительно координат точки требуемой траектории.
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2325317C1 |
| KR 0100335327 B1, 23.11.2002 | |||
| DE 102008019373 A1, 22.01.2009 | |||
| СПОСОБ ПРЕДОТВРАЩЕНИЯ РАСКАЧИВАНИЯ ГРУЗА НА ГИБКОМ ПОДВЕСЕ (ВАРИАНТЫ) | 2009 |
|
RU2406679C2 |

