Изобретение относится к радиолокации и радионавигации и предназначено для определения угла наблюдения протяженного объекта прямым методом.
Точность прогнозирования движения объектов, точность автоматического полета и посадки зависят от точности определения курсового угла радиостанции (Ярлыков М.С. Статистическая теория радионавигации. М. Радио и связь, 1985, с. 22), или, что равнозначно, угла наблюдения объекта (Штагер Е.А. Рассеяние радиоволн на телах сложной формы. М. Радио и связь, 1986, с.33) угла γ, отсчитываемого в плоскости локации объекта по часовой стрелке от продольной оси объекта до направления на локатор (фиг.1).
Существуют различные способы измерения, например способ измерения путевого угла [1] заключающийся в излучении сигнала в направлении объекта, приеме отраженного от объекта сигнала, измерении дальности до объекта (D), измерении азимута (θ ) на объект, измерении скоростей изменения дальности (D) и азимута ( θ ) и измерении путевого угла по формуле
Ψп= θ+arctg  . (1)
. (1)
Однако данный способ предполагает косвенное измерение путевого угла, который в общем случае не совпадает с углом наблюдения объекта.
Наиболее близким к изобретению является курсовой способ измерения угла наблюдения [2] заключающийся в излучении сигнала измерительной станции в направлении объекта, приеме этого сигнала лоцируемым объектом, определении на объекте направления на излучатель (например, методом максимума, минимума, равносигнальным) относительно продольной оси объекта, т.е. угла наблюдения ( γ) и передачи измеренного на объекте значения γ на измеритель.
Однако данный способ является запросным и предполагает измерение угла наблюдения γ на самом объекте, т.е. требует активного объекта и принципиально не позволяет проводить измерения γ непосредственно измерительной станцией, т. е. в случае пассивного объекта или, что то же самое, не позволяет автономно производить измерение.
Цель изобретения расширение функциональных возможностей за счет измерения угла наблюдения пассивного объекта прямым методом.
Цель достигается тем, что осуществляют излучение сигнала измерительной станции. В отличие от прототипа дополнительно осуществляют путем отраженного от объекта сигнала при сканировании луча антенны на прием по закону θпр(t), измерение промежутка времени (tc) между началом сканирования на прием и моментом начала приема отраженного сигнала, измерение доплеровской частоты (fg ) принимаемого сигнала и измерение угла наблюдения γ по формуле
γ arctg ·
· 
 -θпр(t)+θпр(tc), (2) где fo частота излученного сигнала; τпп интервал времени между началом излучения и началом сканирования луча антенны на прием.
-θпр(t)+θпр(tc), (2) где fo частота излученного сигнала; τпп интервал времени между началом излучения и началом сканирования луча антенны на прием.
Сущность предлагаемого способа заключается в следующем.
Антенна излучает сигнал частотой fo в секторе обзора [θ1, θ1 + θобз] в котором находится лоцируемый объект с угловым размером θц. Через время τпп после начала излучения луч антенны начинает сканировать на прием отраженного от объекта сигнала по закону θпр(t) в том же секторе [ θ1, θ1 + θобз] за время τобз, т.е. осуществляет быстрое сканирование (Гинзбург В.М. Формирование и обработка изображений в реальном времени: Методы быстрого сканирования. М. Радио и связь, 1986, с.232). Причем возможны два варианта построения локатора: двухантенный или одноантенный (Гинзбург В.М. с.25-26). Далее рассмотрим одноантенный вариант. Измеряют момент времени (tс) прихода отраженного сигнала с момента начала сканирования на прием θпр (t 0) θ1 (фиг. 2). Ширина диаграммы направленности антенны, например, по уровню половинной мощности ( θо) должна быть сравнима с угловым размером лоцируемого объекта (фиг. 3):
θо ≅ θц ≅ θобз. (3)
Измеряют частоту Доплера fд принимаемого сигнала, которая определяет фазовую диаграмму рассеяния зависимость фазового набега в отраженной волне от угла наблюдения объекта (Штагер Е.А. с.170). Доплеровский сдвиг частоты является результатом изменения дальности до текущей "светящейся" точки протяженного объекта (Островитянов Р.В. Басалов Ф.А. Статистическая теория радиолокации протяженных целей. М. Радио и связь, 1982, с.232) (фиг. 4):
D(t) Dн[cos θпр1(t)
ctg (γ + θпр1(t)) sin θпр1(t)] (4)
f fo. (1 V

 )/(1 + V
)/(1 + V

 ) fo + fд (5)
) fo + fд (5)
vrΣ vr+  , (6) где vr радиальная скорость объекта.
, (6) где vr радиальная скорость объекта.
Выражение (4) получено на основе теоремы тангенсов (Бронштейн И.Н. Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. 13-е изд. М. Наука, 1986, с.190) для треугольника ОЦЦi (фиг. 4):
tg(Ц O)
O)  ОЦ
ОЦ sin
sin (t)/ [
(t)/ [ ОЦ
ОЦ -
- ОЦ
ОЦ cos
cos (t)] (7) где Ц
(t)] (7) где Ц O π-γ-
O π-γ- (t)
(t)
(8) ОЦ
ОЦ Dн= cτпп/2; (9)
Dн= cτпп/2; (9) ОЦ
ОЦ D(t); (10)
D(t); (10) (t) θпр(t)-θпр(tc)≅θц≪ γ; (11) что соответствует условию eц≪ Dн.
(t) θпр(t)-θпр(tc)≅θц≪ γ; (11) что соответствует условию eц≪ Dн.
Так как vrΣ ≪ c то
f fo (1 2 V

 ) fo + fд; (12)
) fo + fд; (12)
fд -2fo. V

 . (13)
. (13)
Когда за время сканирования при приеме τобз объект можно считать неподвижным (обычно τобз τимп): ≫ vr; (14)
≫ vr; (14)
vrΣ , (15) тогда частота Доплера fд (13) определяется соотношением
, (15) тогда частота Доплера fд (13) определяется соотношением
fд= -2fo·  /c (16)
/c (16)
С учетом равенства (11) и соотношения (4) выражение (15) примет вид
vrΣ -Dн·ctg[γ+θпр(t)-θпр(tc)]  (17) так как
(17) так как
sin θпр1(t) ctg ( γ + θпр1(t)) cos θпр1(t) 1.(18)
Из выражения (17) легко перейти к исходной формуле (2) для определения угла наблюдения γ объекта. На основе измерения доплеровского сдвига частоты fд и измерения временного интервала (tс) между началом сканирования на прием θпр (t 0) θ1 и моментом времени начала приема отраженного сигнала (фиг. 2) осуществляют измерение угла наблюдения γ объекта (фиг. 1) по формуле (2).
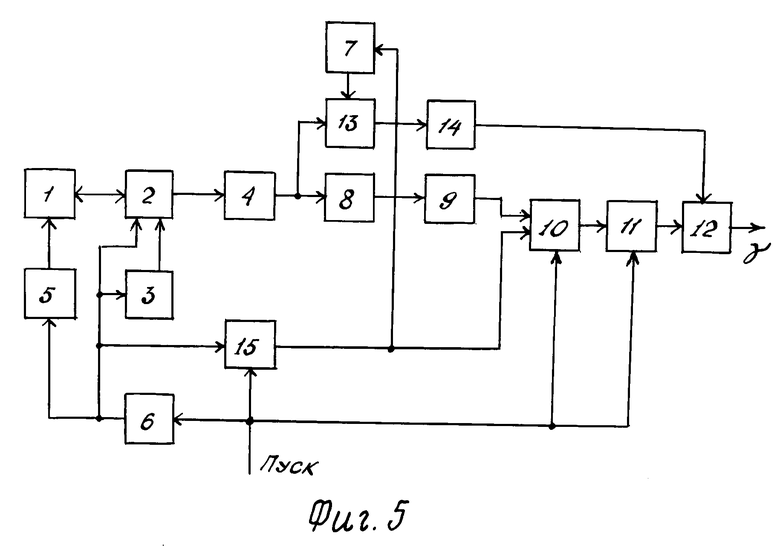
На фиг. 5 представлена структурная схема системы, реализующая способ измерения угла наблюдения объекта.
Система, реализующая способ измерения угла наблюдения объекта, состоит из сканирующей антенны 1, антенного переключателя (АП) 2, передатчика 3, приемника 4, системы 5 управления антенной (СУА) синхрогенератора 6, гетеродина 7, амплитудного детектора (АД) 8, одновибратора 9, триггера 10, измерителя 11 временного интервала (ИВИ), процессора 12, частотного детектора (ЧД) 13, преобразователя 14 частота код и счетчика 15. Выход сканирующей антенны 1 соединен с выходом АП 2, первый вход которого подключен к выходу передатчика 3, второй выход АП 2 соединен с входом приемника 4. Выход СУА 5 подсоединен к входу управления сканирующей антенны 1, выход приемника 4 соединен с входами АД 8 и ЧД 13, второй вход которого подключен к выходу гетеродина 7. Выход АД 8 соединен с входом одновибратора 9, выход одновибратора подключен к входу установки в нулевое состояние триггера 10. Выход триггера 10 подключен к входу ИВИ 11, выход которого соединен с первым входом процессора 12. Выход ЧД 13 соединен через преобразователь 14 код частота с вторым входом процессора 12, выход процессора 12 является выходом системы. Пусковой вход системы соединен с входами запуска синхрогенератора 6 и ИВИ 11, а также со входами начальной установки триггера 10 и счетчика 15. Выход синхрогенератора 6 подключен к синхровходам СУА 5, передатчика 3 и АП 2, а также к входу счетчика 15, выход которого соединен с входом установки в единичное состояние триггера 10 и входом запуска гетеродина 7.
Система работает следующим образом.
Импульс на пусковом входе устройства устанавливает в нулевое состояние триггер 10 и счетчик 15 и запускает ИВИ 11 (например, Финкельштейн М.И. Основы радиолокации: Учебник для вузов. 2-е изд. М. Радио и связь, 1983, с. 429) и синхрогенератор 6. По первому импульсу синхрогенератора 6 АП 2 (Финкельштейн М. И.) подключает выход передатчика 3 к сканирующей антенне 1 (Гинзбург В.М.) и подается на синхровходы передатчика 3 и СУА 5 (Гинзбург В. М.); (Ушкар М.Н. Микропроцессорные устройства в радиоэлектронной аппаратуре/ Под ред. Б. Ф.Высоцкого М. Радио и связь, 1988, с.128). В результате этого передатчик 3 формирует на своем выходе радиоимпульс длительностью τимп и несущей частоты fс, а СУА 5 разворачивает луч антенны 1 за время длительности импульса τимп в заданном секторе сканирования ( θ1, θ1 + θобз) по закону θпер(t). Через известное время τпп на выходе синхрогенератора 6 появляется второй импульс, по которому АП 2 подключает выход сканирующей антенны 1 к входу приемника 4, а СУА 5 обеспечивает сканирование луча антенны 1 с направления θ1 до направления θ1 + θобз, т.е. в секторе обзора, за заданное время τобзпо закону θпр(t). Этот второй импульс с выхода синхрогенератора 6 подается на вход счетчика 15, который работает в режиме деления частоты на два (Исаков Ю.А. и др. Основы промышленной электроники. Киев: Техника, 1976, с. 544), т.е. на выходе счетчика 15 появляется сигнал. Сигнал с выхода счетчика 15 запускает гетеродин 7 и устанавливает в единичное состояние триггер 10. Единичный сигнал с выхода триггера 10 подается на вход ИВИ 11, который начинает измерение. Отраженный от объекта сигнал принимается антенной 1 и через АП 2 поступает на вход приемника 4. Усиленный сигнал с выхода приемника 4 поступает на входы АД 8 и ЧД 13 (Смогилев К.А. Вознесенский И.В. Филиппов Л. А. Радиоприемники СВЧ. М. Воениздат, 1967, с.556). Сигнал с выхода АД 8 запускает одновибратор 9 (Исаков Ю.А. и др. Основы промышленной электроники. Киев: Техника, 1976, с.296). Импульс с выхода одновибратора 9 поступает на вход установки в нулевое состояние триггера 10, в результате чего ИВИ 11 прекращает измерение.
На выходе ИВИ 11 появляется код временного интервала tс. На выходе ЧД 13 появляется сигнал с частотой Доплера fд, код которой с выхода преобразователя 14 частота код (Гитис Э.И. Пискулов Е.А. Аналого-цифровые преобразователи: Уч.пособие для вузов. М. Энергоиздат, 1981, с.153) поступает на второй вход процессора 12 (Казаринов Ю.М. Номоконов В.Н. Филиппов Ф.В. Применение микропроцессоров и микроЭВМ в радиотехнических системах. Учеб.пособие для радиотехнических специальностей вузов. М. Высшая школа, 1988, с.207). Процессор реализует вычисление угла наблюдения объекта ( γ) по алгоритму
γ arctg ·
·  ·
·  -θпр(t)+θпр(tc) (19)
-θпр(t)+θпр(tc) (19)
Так как закон сканирования при приеме θпр(t), а также интервал времени между началом сканирования при излучении и началом сканирования при приеме (τпп) априорно известны, то программа, реализующая алгоритм (19), является жесткой.
Таким образом, предлагаемый способ измерения угла наблюдения объектов позволяет расширить функциональные возможности за счет обеспечения возможности определения угла наблюдения пассивных объектов прямым методом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ДО ОБЪЕКТА | 1992 |
|
RU2101726C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ В СИСТЕМАХ СО СВЕРХСКАНИРОВАНИЕМ | 1994 |
|
RU2093855C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 1990 |
|
RU2012901C1 |
| СПОСОБ ОТОБРАЖЕНИЯ ВНЕШНЕЙ КОНТРОЛИРУЕМОЙ ОБЛАСТИ ПРОСТРАНСТВА ВО ВНУТРЕННЮЮ ОБЛАСТЬ НАБЛЮДЕНИЯ | 1994 |
|
RU2129718C1 |
| Способ определения путевой скорости объекта | 1991 |
|
SU1807429A1 |
| Способ определения радиальной скорости объекта | 1991 |
|
SU1809399A1 |
| Способ определения тангенциальной составляющей скорости объекта | 1991 |
|
SU1809400A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ, НАХОДЯЩИХСЯ В ТОЛЩЕ ДОННОГО ГРУНТА | 2009 |
|
RU2410721C1 |
| Способ обнаружения вертолетов бортовой радиолокационной станцией | 2018 |
|
RU2691387C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО КЛАССИФИКАЦИИ ВИБРИРУЮЩИХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ТРАЕКТОРНЫМИ НЕСТАБИЛЬНОСТЯМИ ПОЛЕТА В ПРИЗЕМНЫХ СЛОЯХ АТМОСФЕРЫ | 2009 |
|
RU2407031C1 |
Использование:в радионавигации для определения угла наблюдения объекта. Сущность изобретения: способ заключается в том, что излучают сигнал с частотой fo измерительным пунктом, принимают отраженный сигнал при сканировании луча антенны во время приема по закону θпр(t) , измеряют промежуток времени tс между началом сканирования на прием и моментом начала приема отраженного сигнала, измеряют доплеровскую частоту fд , принимают сигнал и определяют угол γ наблюдения по формуле g = arctg [(θпр(t)/d(t)·(fo/fд τпп)]-θпр(t)+θпр(tс), где τпп- интервал времени между началом излучения сигнала и началом сканирования луча антенны на прием отраженного сигнала. 5 ил.
СПОСОБ ИЗМЕРЕНИЯ УГЛА НАБЛЮДЕНИЯ ОБЪЕКТА, заключающийся в том, что излучают сигнал частотой fо измерительным пунктом, принимают от объекта отраженный сигнал и определяют угол наблюдения объекта, отличающийся тем, что прием отраженного от объекта сигнала осуществляют при сканировании луча антенны во время приема по закону θпр(t) измеряют промежуток времени tс между началом сканирования на прием и моментом начала приема отраженного сигнала, измеряют доплеровскую частоту fд принимаемого отраженного сигнала и определяют угол наблюдения объекта по формуле
где τпп интервал времени между началом излучения сигнала и началом сканирования луча антенны на прием отраженного сигнала.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ярлыков М.С | |||
| Статистическая теория радионавигации | |||
| М.: Радио и связь, 1985, с.28. | |||
