Предлагаемое изобретение относится к области технической физики, причем предпочтительным является его использование в оптической астрономии для построения когерентных систем из телескопов.
При проектировании и эксплуатации многоапертурных оптических систем (МОС) встает задача их фигуризации. Простейшей и, в то же время, одной из наиболее широко используемых разновидностей МОС является интерферометр Майкельсона, поэтому проблему фигуризации рассмотрим применительно к такой системе.
При построении изображения какого-либо источника излучения необходимо соблюдение геометрического подобия изображений входных зрачков системы на фокусирующей плоскости их действительному положению в системе. Проблема выполнения этого условия носит название проблемы фигуризации. Несоблюдение условия фигуризации, проявляющееся в относительном сдвиге изображений входных зрачков системы на фокусирующей поверхности, приводит к смещению интерференционной картины изображения и, как следствие, к резкому ухудшению качества регистрируемого изображения. Проблема фигуризации состоит в выявлении и компенсации этого сдвига.
Известен способ фигуризации МОС, основанный на использовании вспомогательных лазерных пучков, распространяющихся от плоскости регистрации изображения до уголковых отражателей, расположенных на приемных зеркалах системы, и обратно. Такой способ применен в многозеркальном телескопе (США) и описан, например, в P. roceedings of Kitt Peak National Observatory Conference in "Optical and infrared telescopes for Hie 1990s", Tuscon, Arizona, 7-12 January, 1980, p.115, 491.
Но такой способ фигуризации является неэффективным, т.к. из-за высокочастотных наклонов лазерных пучков, вызванных атмосферными неоднородностями (внутренняя турбулентность), величину смещения определяют некорректно.
Известен также способ фигуризации МОС, основанный на регистрации изображения и максимизации числа наблюдаемых интерференционных полос путем изменения положения субапертур системы. Этот способ применен в интерферометре 12Т (Франция) и описан, например, в статье Labeyrie A.-In: Progress in Optics / Ed. Wolf E. North-Holland Publ. 1976, vol. 14, p.49.
Основным недостатком этого способа является его пониженная точность, обусловленная тем, что в малом спектральном диапазоне число наблюдаемых интерференционных полос при изменении положения субапертур меняется незначительно, и точно найти точку максимума не представляется возможным. Кроме того, достигаемое данным способом состояние фигуризации оказывается корректным только для этого (одного) углового положения источника, при изменении которого необходимо повторять процесс фигуризации. Следует отметить также и длительность процесса фигуризации, обусловленную необходимостью многократных повторений регистрации счета полос интерференционной картины.
Наиболее близким по технической сущности решением (прототипом) является способ фигуризации МОС, основанный на предварительном фазировании системы, регистрации изображения внеосевого источника излучения, включающего набор интерференционных полос, определении величины дефигуризации системы путем сравнения вычисленных распределений средней интенсивности и видности полос, определяемой по измеренному распределению контраста, и компенсации этой величины (см. а.з. N 3166141/24-25 от 26.12.86г. авторов Бакута П.А. и др. по которой получено положительное решение от 07.08.87г. исх. N P-23136).
Основным недостатком этого способа является его пониженная точность, обусловленная тем, что необходимое при этом способе предварительное фазирование МОС не может быть выполнено указанным способом с точностью лучше, чем ≈ 3 λ (см. например, а.с. N 222230). Следовательно, и сам процесс фигуризации МОС будет обеспечивать точность, как минимум, не более 3l. Кроме того, необходимость применения предварительного процесса фазирования нежелательна также еще по двум причинам. Во-первых, это снижает возможности применения указанного способа ко всем без исключения МОС, т.к. возможен класс систем, наличие точных систем фазирования для которых не является необходимым условием их работоспособности. Во-вторых, необходимость предварительного фазирования МОС ведет к увеличению времени процесса фигуризации, что также является нежелательным.
Целью предлагаемого изобретения является увеличение точности фигуризации при одновременном ускорении процесса фигуризации, причем эти цели достигаются также при одновременном расширении класса систем, для которых может быть использован предложенный способ.
Следует отметить, что предлагаемый способ фигуризации также может работать с любым классом источников излучения, но предпочтительным является его использование при работе с точечным источником, т.к. случаю протяженного источника соответствует пониженный контраст регистрируемой интерференционной картины, что приводит к уменьшению точности фигуризации.
Поставленная цель достигается тем, что после регистрации изображения внеосевого источника излучения, включающего набор интерференционных полос, и измерения расстояния между максимумами распределений средней интенсивности изображения и видности полос, изменяют на величину, соразмеримую с половиной угла поля зрения системы, положение источника излучения относительно оптической оси системы и осуществляют повторные регистрацию изображения и измерение расстояния между максимумами распределений средней интенсивности изображения и видности полос в нем, и определяют величину дефигуризации по разности измеренных расстояний. Путем последующей подвижки зеркал переноса изображения добиваются состояния сфигуризованности МОС.
Следует отметить также, что измерение величины дефигуризации предложенным способом также можно определить, не прибегая к повороту самой монтировки МОС (для изменения углового положения источника излучения в поле зрения системы), а лишь использовав явление суточного вращения Земли. Для наиболее распространенных альт-азимутальных монтировок при работе с внеосевым источником время, необходимое для измерения величины дефигуризации, оказывается достаточно малым.
Дадим краткое математическое обоснование способа.
Введем в картинную плоскость объекта ось координат  в плоскость изображений ось координат
в плоскость изображений ось координат  Распределение поля в этих плоскостях будем полагать
Распределение поля в этих плоскостях будем полагать  соответственно. Пусть плоскость
соответственно. Пусть плоскость  соответствует плоскости приемных зеркал системы, а
соответствует плоскости приемных зеркал системы, а  плоскости фокусирующего (главного) зеркала. Очевидно, что между этими плоскостями установлено взаимно однозначное соответствие. Для облегчения понимания физического процесса сначала рассмотрим случай формирования изображения обычной телескопической системой, когда приемное и фокусирующее зеркала объединены. Распределение поля в плоскости
плоскости фокусирующего (главного) зеркала. Очевидно, что между этими плоскостями установлено взаимно однозначное соответствие. Для облегчения понимания физического процесса сначала рассмотрим случай формирования изображения обычной телескопической системой, когда приемное и фокусирующее зеркала объединены. Распределение поля в плоскости  будет
будет 
Рассмотрим случай наблюдения некогеррентного точечного объекта. В этом случае справедливо
Поле  в плоскости
в плоскости  может быть представлено в виде:
может быть представлено в виде:
где запись  означает, что радиус-вектор
означает, что радиус-вектор  является в общем случае функцией двух координат: ρ и v, c некоторая постоянная, определяемая интегралом распространения, k волновое число.
является в общем случае функцией двух координат: ρ и v, c некоторая постоянная, определяемая интегралом распространения, k волновое число.
Найдем значение  . Из геометрического рассмотрения несложно прийти к заключению, что
. Из геометрического рассмотрения несложно прийти к заключению, что
где  расстояние от плоскости главного зеркала до картинной плоскости. Отсюда
расстояние от плоскости главного зеркала до картинной плоскости. Отсюда
Подставив значение  в (2), получим
в (2), получим
Постоянные множители под знаком интеграла несущественны для данного анализа, поэтому в дальнейшем мы будем объединять их в некоторую общую постоянную c.
Запишем выражение для функции когерентности, использовав выражение (1).
где  пространственный спектр распределения интенсивности объекта, y S/R угловая координата.
пространственный спектр распределения интенсивности объекта, y S/R угловая координата.
В соответствии с известной формулой линзы поля на ее выходе  и входе
и входе  связаны соотношением:
связаны соотношением:
где F фокусное расстояние линзы. Найдем теперь распределение интенсивности I(x) поля U(x). Очевидно,  и
и
где Z расстояние от плоскости главного зеркала до плоскости изображений, W(v) апертурная функция такая, что
Тогда
Произведя в (3) замену переменных V1 V + Δ V, V2=V, получаем (4)
(4)
Выражение (4) получено при условии идеальной фокусировки изображения, обеспечивающей выполнение условия 1/R + 1/Z 1/F 0.
Перейдя в соответствии с правилами аппарата Фурье в Фурье-сопряженную область, получим:
где
tmax D/λZ, а D диаметр апертуры.
Анализируя полученное выражение, не сложно убедиться, что каждая пространственная гармоника exp[j2πxωx] на фиксированной частоте ωx представляет собой сумму отдельных составляющих на различных длинах волн λ и разностных расстояниях Dv таких, что Δv/λz = ωx Каждая такая составляющая модулируется спектром объекта  т.е. при обычном формировании изображения все составляющие "когерентны" и взаимно усиливают друг друга. Подобное условие "когерентности" должно выполняться и для рассматриваемой МОС.
т.е. при обычном формировании изображения все составляющие "когерентны" и взаимно усиливают друг друга. Подобное условие "когерентности" должно выполняться и для рассматриваемой МОС.
Повторив проведенные выкладки, несложно получить I(x) в системе, в которой плоскости приема  и фокусировки
и фокусировки  разделены. Вместо (4) тогда будет справедливо выражение:
разделены. Вместо (4) тогда будет справедливо выражение:
Учитывая, что W(Vi) представляет собой сумму двух слагаемых, соответствующих двум субапертурам, выражение (5) приводится к
I(x) = 2(I0(x) + Re∫I12(x)dx) (6)
где I0(x) член, описывающий интенсивность изображения, обусловленную одной субапертурой;
I12(x) член, описывающий перераспределение интенсивности изображения, полученную за счет интерференции двух пучков от субапертур.
Используя известное выражение  для случая точечного источника при
для случая точечного источника при  , получим:
, получим:
Тогда для I0(x) получим следующее выражение:
При ненормальной фигуризации МОС между изображениями от 1-й и 2-й субапертур будет наблюдаться некоторая разность c', т.е.  , где κ коэффициент масштабирования системы, определяемый ее характеристиками.
, где κ коэффициент масштабирования системы, определяемый ее характеристиками.
Тогда
Для I12(x) аналогично получаем:
Осуществим замену координат x′=ϑ0κz+x и учтем работу системы не на одной фиксированной длине волны, а в некотором спектральном диапазоне шириной Δλ. Тогда, с учетом (8) и (10), окончательно получим:
где λ0 рабочая частота системы.
Если принять во внимание, что перед началом работы мы не осуществляли точного фазирования системы, то выражение (11) примет вид:
В результате несложных математических преобразований несложно показать, что
где
Отсюда видно, что дефигуризация приводит качественно к такому же ухудшению формируемого изображения, как и дефазирование системы, за счет некоторой разности хода ΔS разных оптических пучков.
В результате для распределения видности V(x') интерференционной картины, сформированной по распределению контраста K Imax/Imin, получаем выражение
Максимум видности достигается в точке  в то время как максимум средней интенсивности достигается в точке X'=0. После первой регистрации изображения мы можем измерить разность между максимумами распределения средней интенсивности и распределения видности в зарегистрированном изображении:
в то время как максимум средней интенсивности достигается в точке X'=0. После первой регистрации изображения мы можем измерить разность между максимумами распределения средней интенсивности и распределения видности в зарегистрированном изображении:
где ϑ1 угловое положение источника излучения в поле зрения при первой регистрации.
Аналогично после второй регистрации имеем: 
Найдя теперь разность этих величин, окончательно получим: (15)
(15)
Из выражения (15) при известных параметрах ϑ1,ϑ2 z, l и найденной разности Δ1 - Δ2 однозначно определяется величина дефигуризации системы c. Осуществляя ее компенсацию (например, путем подвижки соответствующих зеркал переноса 5 на фиг. 1), добиваются состояния сфигуризованности системы.
Из выражения (15) видно, что чем больше будет разность между двумя угловыми положениями источника излучения в поле зрения системы при определении величины дефигуризации, тем точнее можно будет определить эту величину. С другой стороны, пределы изменения угла ограничены величиной поля зрения системы. Поэтому, с учетом того, что при первой регистрации источник может находиться и не на краю поля зрения, при повторной регистрации целесообразно положение источника излучения в поле зрения системы менять на величину, сравнимую с половиной угла поля зрения.
Сравнительный анализ известных технических решений (аналогов и прототипа) с предложенным показывает, что наиболее существенные отличия последнего заключаются в операциях:
изменения углового положения источника излучения относительно оптической оси системы;
измерения соответствующего изменения расстояния до положения максимума видности полос изображения,
что в совокупности с другими отличительными признаками позволяет сделать вывод о новизне предложенного способа.
На фиг. 1 представлена возможная схема реализации предложенного способа.
Здесь: 1 принимаемое световое излучение;
2 телескопическая система;
3 светофильтр;
4 устройство изменения разности хода;
5 система плоских зеркал;
6 фокусирующая система;
7 устройство регистрации изображения (квадратичный детектор);
8 устройство определения средней интенсивности и контраста интерференционных полос;
9 устройство определения видности полос;
10 устройство определения разности расстояний между максимумами распределений средней интенсивности и видности;
11 запоминающее устройство;
12 компаратор (устройство определения величины дефигуризации);
13 управляющее устройство;
14 устройство подвижки зеркал переноса.
Следует отметить, что устройства 8, 9, 10, 11, 12 могут быть легко реализованы на простейших аналого-цифровых элементах.
Прием оптического излучения 1 осуществляется телескопической системой 2. Выбранный светофильтр 3 обеспечивает необходимый для наблюдений спектральный диапазон. Устройство изменения разности хода 4 предусмотрено для грубого фазирования системы (до примерно десятков/сотен длин волн, обеспечивающего появление интерференционных полос). При помощи системы плоских зеркал 5 и фокусирующей системы 6 происходит регистрация изображения на устройстве регистрации 7. Устройство 8 определяет среднюю интенсивность изображения и контраст интерференционных полос изображения. В устройстве 9 определяется видность полос, после чего устройством 10 определяется разность расстояний между максимумами распределений средней интенсивности и видности. В запоминающем устройстве 11 записывается найденная величина разности Δ1 после первых регистрации и измерения. После повторной регистрации и измерения разности Δ2 устройство 12 определяет величину дефигуризации МОС, которая является управляющим сигналом для управляющего устройства 13, которое и выдает сигнал на компенсацию дефигуризации исполнительному устройству 14 устройству подвижки зеркал переноса.
Оценим преимущества предложенного способа. В качестве меры степени повышения точности фигуризации примем ошибку фигуризации. В способе-прототипе она складывается из ошибки фазирования (как указано, составляет примерно 3λ) и собственно ошибки самого процесса фигуризации. В предложенном же способе она характеризуется только ошибкой самого процесса фигуризации, которая оценивается величиной примерно 0,5l на краю поля зрения системы. Т.о. выигрыш в точности фигуризации составит ≈ 7 раз. Проведенное машинное моделирование (ЭВМ СМ-1420) подтвердило приведенные соотношения.
Степень ускорения процесса фигуризации оценим, исходя из среднетехнических характеристик существующих в настоящее время систем указанного класса. Так, время фазирования при помощи существующих в настоящее время способов фазирования (см. например, а.с. N222230) системы оценивается величиной ≈ 1 мин. Для поворота системы (изменения углового положения источника в поле зрения) необходимо примерно 10 с, а для регистрации и вычисления величины дефигуризации еще необходимо (при существующих сейчас системах обработки данных астрономических измерений) примерно 15 с. Т.о. выигрыш во времени фигуризации системы составит примерно 2 раза (по способу-прототипу: 1 мин+15 с; по предложенному способу: 15 с+10 с+15 с). Окончательно, преимущества предложенного способа по сравнению со способом-прототипом заключаются в повышении точности процесса фигуризации примерно в 7 раз при одновременном ускорении процесса фигуризации примерно в 2 раза.
В настоящее время на предприятии проведены теоретические исследования предложенного способа и разрабатывается технико-конструкторская документация на устройство, реализующее предложенный способ. Срок реализации по плану - 1989 год.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФИГУРАЦИИ МНОГОАПЕРТУРНОЙ ОПТИЧЕСКОЙ СИСТЕМЫ | 1988 |
|
RU2085992C1 |
| СПОСОБ ФАЗИРОВАНИЯ МНОГОАПЕРТУРНОЙ ОПТИЧЕСКОЙ СИСТЕМЫ | 1988 |
|
RU2038628C1 |
| СПОСОБ ФАЗИРОВАНИЯ МНОГОАПЕРТУРНОЙ ОПТИЧЕСКОЙ СИСТЕМЫ | 1986 |
|
RU2042961C1 |
| СПОСОБ ФАЗИРОВАНИЯ МНОГОАПЕРТУРНОЙ СИСТЕМЫ | 1983 |
|
RU2030764C1 |
| СПОСОБ ИЗМЕРЕНИЯ СТЕПЕНИ ПРОСТРАНСТВЕННОЙ КОГЕРЕНТНОСТИ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 2003 |
|
RU2234064C1 |
| Способ определения частоты и амплитуды модуляции фазы волнового фронта, создаваемого колебаниями мембраны клетки | 2020 |
|
RU2743973C1 |
| СПОСОБ ВИДЕОИЗМЕРЕНИЯ ТОЛЩИНЫ ПЛЕНКИ | 2002 |
|
RU2233430C1 |
| СПОСОБ ФАЗИРОВАНИЯ МНОГОАПЕРТУРНОЙ СИСТЕМЫ | 1985 |
|
RU2042966C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЛАЗЕРНОГО ПУЧКА С ПРОИЗВОЛЬНО ЗАДАННЫМ РАСПРЕДЕЛЕНИЕМ ИНТЕНСИВНОСТИ В ДАЛЬНЕМ ОПТИЧЕСКОМ ПОЛЕ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2019 |
|
RU2716887C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРЕЦИЗИОННОГО ЛАЗЕРНО-ИНТЕРФЕРЕНЦИОННОГО ИЗМЕРЕНИЯ РАССТОЯНИЙ И ПЕРЕМЕЩЕНИЙ | 2019 |
|
RU2721667C1 |
Использование: область технической физики. Сущность изобретения: в способе измерения величина дефигуризации многоапертурной оптической системы после регистрации изображения внеосевого источника излучения, включающего набор интерференционных полос, и измерения расстояния меду максимумами распределения средней интенсивности изображения и видности полос в нем, изменяют на угловую величину, соразмеримую с половиной угла поля зрения системы, положение источника излучения относительно оптической оси системы, и осуществляют все операции повторно. 1 ил.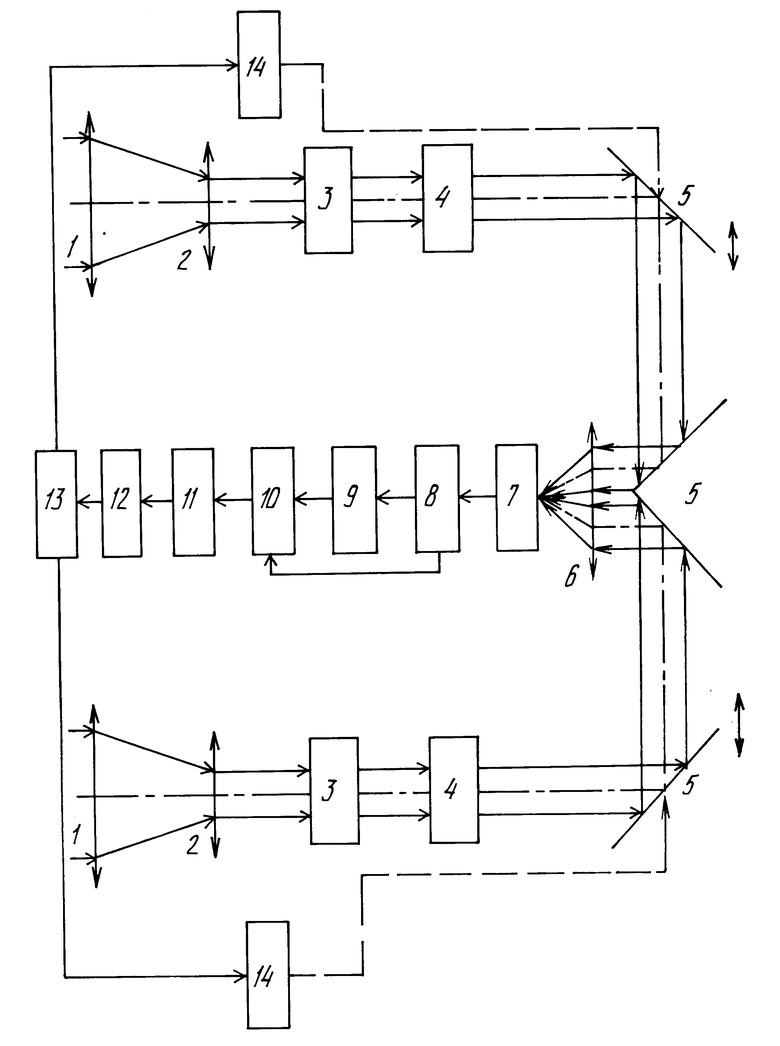
Способ измерения величины дефигуризации многоапертурной оптической системы, основанный на регистрации состоящего из интерференционных полос изображения внеосевого источника излучения и измерения расстояния между максимумами распределений средней интенсивности изображения и видности полос в нем, отличающийся тем, что, с целью повышения точности при одновременном ускорении процесса измерения, после регистрации и измерения расстояния между максимумами распределений средней интенсивности изображения и видности полос в нем, изменяют на величину, соизмеримую с половиной углового поля зрения системы, угловое положение источника излучения относительно оптической оси ее системы, осуществляют повторные регистрацию и измерение расстояния между максимумами распределений средней интенсивности изображения и видности в нем и определяют величину дефигурации по разности измеренных расстояний.
| Labeyril A | |||
| Ju | |||
| Progress in Optils/Ed Wolf E., North-flollaud Publ, 1976, vol | |||
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
| Способ смешанной растительной и животной проклейки бумаги | 1922 |
|
SU49A1 |
| Авторское свидетельство СССР кл | |||
| N 266746, кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
