Известны способ и устройство аддитивного формирования характеристики направленности (XH), описаны на с. 18 [1] Недостаток низкая эффективность направленных свойств антенны.
Известны способ и устройство формирования XH путем учета величины τ компенсации задержки сигнала второго приемника [2]
Прототип характеризуется низкой эффективностью направленных свойств антенны.
Цель изобретения повышение эффективности направленных свойств антенны.
Поставленная цель достигается нелинейной обработкой сигналов двух приемников, при этом формирование XH-процесса X(z) из входного процесса осуществляется передаточной функцией H(z) X(z)/S(z) и реализованной в аналоге и прототипе в виде H(z)
а его Z преобразование;
где Δ временная задержка принимаемого сигнала между соседними приемниками.
Реализация 1 требует большого количества n элементов антенной решетки (AP). Предлагается реализовать способ не по 1, а в виде
Из 1 и 2 находим X(Z)
где ai весовые коэффициенты приемников прототипа,
откуда получим:
X(Z)+C•Z-ΔX(Z) = B•S(Z)+A•Z-Δ•S(Z).
Используя обратное Z-преобразование получим
Поиск коэффициентов A, B и C известен путем решения уравнения 3 с учетом заданных ai AP эквивалент XH, который мы хотим получить с помощью двух приемников (с.108 [3]). Такой подход обеспечивает при заданных свойствах XH замену многоэлементной решетки антенны на ее двухэлементный эквивалент. Или при антенне из двух элементов (приемников) предлагаемым формируется XH, эквивалентная многоэлементной антенне с потенциально лучшими направленными свойствами. Таким образом предлагаемый способ позволяет повысить эффективность направленности свойств антенны за счет нелинейной, с цепью обратной связи, обработки сигналов двух приемников.
Блок-схема алгоритма, реализующая процедуры по 4 включает в себя следующие операции (фиг. 1):
1 усиление в B раз сигнала первого приемника;
2 задержка усиленного сигнала на регулируемую временную задержку τ;
3 усиление в A раз сигнала второго приемника;
4 суммирование процессов с бл.2 и 3 данного алгоритма;
5 сравнение процесса на выходе бл.4 со значением этого же процесса, но соответствующего предшествующему по шкале времени на величину регулируемой временной задержки t, введенной для сигнала первого приемника, т.е.
6 поиск аргумента τ максимума X(t), т.е. XH;
7 вычисление угла прихода сигнала от цели по формуле
где C скорость звука в среде;
d расстояние между приемниками;
τ = Δ•i регулируемая временная задержка сигнала первого приемника;
8 индикация угла.
Устройство, реализующее способ отличается от прототипа (состоящего из первого приемника, соединенного через блок регулируемой временной задержки и первый умножитель (усилитель в B раз) с сумматором, кроме того состоящее из второго приемника, соединенного через второй множитель (усилитель в A раз) с сумматором, кроме того состоящее из экстремального регулятора, первый выход которого соединен со вторым входом блока регулируемого временной задержки, второй выход которого соединен с индикатором, шкала которого пропорциональна углу по выражению 5 тем, что выход сумматора соединен с входом уменьшаемого дополнительно внесенного блока разности, выход которого соединен одновременно с экстремальным регулятором и первым входом второго дополнительно внесенного блока регулируемой временной задержки, при этом второй вход последнего блока соединен с первым выходом экстремального регулятора, а выход последнего блока соединен через третий дополнительно внесенный умножитель с входом вычитаемого дополнительно внесенного блока разности.
Устройство реализует способ, формирует на базе двух приемников XH, эквивалентную многоэлементной антенной решетке, направленные свойства задаются выбором коэффициентов: A, B, C. А угол α определяется по величине введенной регулируемой временной t задержке сигнала первого приемника и рассчитывается по выражению 5. Регулировка A, B, C управляет свойствами XH. При этом эффективность двухэлементной антенны вырастает, т.к. A, B, C регулируют вид XH, а техническое решение обеспечивает на базе двух приемников формирование XH, эквивалентной многоэлементной антенной решетки. Это стало возможным за счет нелинейной обработки сигналов двух приемников. Что позволяет сделать вывод о соответствии критериям "новизна" и "существенные отличия".
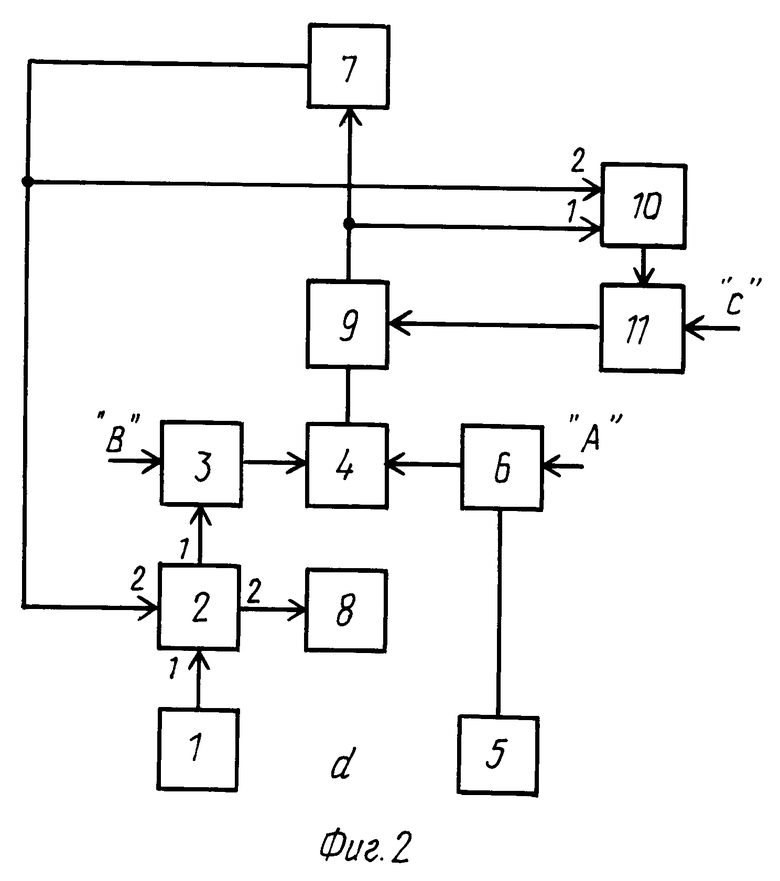
На фиг. 1 изображена блок-схема алгоритма, на фиг.2 изображено устройство, реализующее способ, где обозначено: 1 и 5 первый и второй приемники; 2 блок регулируемой временной t задержки; 3 и 6 первый и второй умножители; 4 сумматор; 7 экстремальный регулятор; 8 индикатор; 9 дополнительно внесенный блок разности; 10 дополнительно внесенный второй блок регулируемой временной t задержки; 11 дополнительно внесенный третий умножитель.
Способ реализуется согласно описанной блок-схемы алгоритма (фиг.1), а устройство состоит из приемника 1, соединенного через блок 2 регулируемой временной t задержки и первый 3 умножитель (усилитель в B раз) с сумматором 4, кроме того состоит из второго 5 приемника, соединенного через второй 6 умножитель с сумматором 4, кроме того состоит из экстремального регулятора 7, первый выход которого соединен со вторым входом блока 2 регулируемой временной t задержки, второй выход последнего соединен с индикатором 8, кроме того выход сумматора 4 соединен с входом уменьшаемого дополнительно внесенного блока 9 разности, выход которого соединен одновременно с экстремальным 7 регулятором и первым входом дополнительно внесенного второго блока 10 регулируемой временной t задержки, при этом второй вход последнего 10 блока соединен с первым выходом экстремального 7 регулятора и вторым входом блока 2 регулируемой временной t задержки, кроме того выход дополнительно внесенного второго блока 10 регулируемой временной t задержки соединен через дополнительно внесенный третий 11 умножитель с входом вычитаемого дополнительно внесенного блока9 разности.
Работает устройство следующим образом.
Сигнал от первого 1 приемника задерживается в блоке 2, усиливается в B раз в первом 3 умножителе суммируется с усиленным в A раз сигналом от второго 5 приемника. Процесс сформированный на выходе сумматора 4 поступает в дополнительно внесенный блок 9 разности, при этом на его вход вычитаемого поступает предыдущий выходной сигнал данного 9 блока, прошедший через дополнительно внесенный второй блок 10 регулируемой временной t задержки и усиленный в C раз в дополнительно внесенном третьем 11 умножителе. Сигнал формируемый на выходе дополнительно-внесенного блока 9 разности поступает на экстремальный 7 регулятор, последний управляет выбором регулируемой временной t задержки с одноименных 2 и 10 блоках, а по величине введенной t регулируемой временной задержки на индикатор выводится значение угла на цель, при этом сигнал индикатора 8 выводятся на шкалу, которая проградуирована в единицах угла, связанного с t выражением 5. В устройстве использованы известные конструктивные решения элементов, аналогичных элементам прототипа, описанные, например, в [2] Применение данных технических решений позволяет повысить эффективность направленных свойств антенны, за счет того, что антенна из двух приемников формирует XH, эквивалентную антенной решетке (AP) из большего (на порядок) количества приемников, так для заявляемой AP X(t) описывается выражением 4, а у прототипа такая XH формируется n-приемника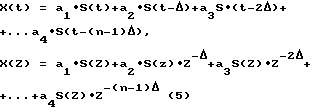
Коэффициенты A, B, C определяются решением системы уравнений приравнивая в 1 и 2 или в 6 и 2 коэффициенты при одинаковых ZiΔ [3]
Таким образом AP из двух приемников формирует XH аналогичную XH, формируемой многоэлементной AP.
Источники информации:
1. Евтютов А.В. Митько В.Б. Инженерные расчеты в гидроакустике. Л. Судостроение, 1989.
2. В. С. Бурдик. Анализ гидроакустических систем. Л.Судостроение, 1988 (прототип)
3. Д. Мак-Кракен, У. Дорн. Численные методы и программирование на фортране. М. Мир, 1977.
Использование: в гидроакустических системах определения угла прихода сигнала для повышения эффективности направленных свойство антенны. Сущность изобретения: формирование характеристики направленности антенной решетки основано на суммировании усиленного в B раз задержанного сигнала первого приемника и усиленного в A раз сигнала первого приемника, с последующим сравнением данной суммы с ее значением, задержанным на регулируемое время и усиленным в C раз, что реализуется устройством, состоящим из двух разнесенных приемников, умножителей амплитуды сигналов приемников, двух блоков регулируемой задержки, сумматора, вычитателя, экстремального регулятора и третьего блока умножения значения сигнала, присутствующего на выходе вычитателя. 1 з. п. ф-лы., 2 ил.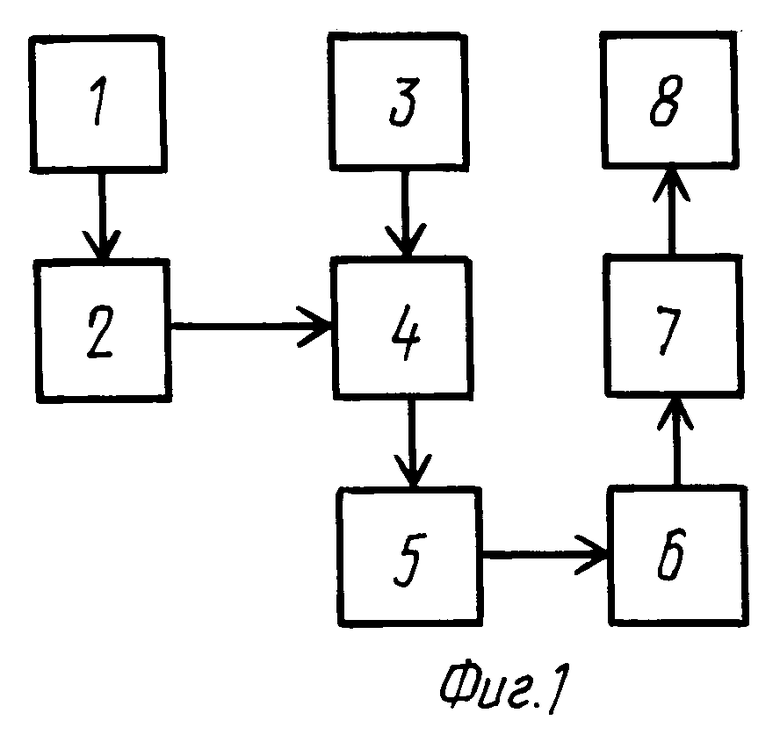
| Бурдик В.С | |||
| Анализ гидроакустических систем | |||
| - Л.: Судостроение, 1988, с | |||
| УСТРОЙСТВО ПАРОПЕРЕГРЕВАТЕЛЯ | 1920 |
|
SU295A1 |
