Изобретение относится к гидроакустике и может быть использовано в навигации.
Известен способ определения скорости движения судна относительно дна, заключающийся в наклонном излучении тональных звуковых сигналов в носовом и кормовом направлениях, приеме отраженных от дна сигналов с двух направлений, вычислении разности частот принятых сигналов и определении скорости по формуле
v  f
f -F
-F (1)
(1)
Способ характеризуется низкой точностью и помехоустойчивостью за счет операции измерения частоты принятых сигналов, оптимизированной для тонального звукового сигнала.
Известен способ определения скорости движения судна относительно дна, основанный на наклонном под углом γ в вертикальной плоскости к направлению движения излучении тональных звуковых сигналов частотой fн, приеме отраженных сигналов частотой fпр и определении скорости по формуле
v  (fпр-fн) (2)
(fпр-fн) (2)
Способ характеризуется низкими точностью и помехоустойчивостью за счет операции измерения частоты принятого сигнала, оптимизированной для тонального звукового сигнала.
Целью изобретения является повышение точности и помехоустойчивости определения скорости движения судна относительно дна, а также увеличение информативности за счет одновременного определения с высокой повышенной точ- ностью ориентации судна относительно дна.
Это достигается тем, что однолучевой доплеровский способ (прототип) определения скорости судна относительно дна изменен введением следующих операций: вместо излучения тонального звукового сигнала излучается сложный сигнал, состоящий из инверсной пары сдвинутых сигналов с гиперболической частотной модуляцией (ГЧМ) вида
S(t)= rext sin
sin ln(1-kt)
ln(1-kt) +rext
+rext sin
sin ln(1+kt)
ln(1+kt) (3) где ω постоянная величина, обозначающая начальную частоту;
(3) где ω постоянная величина, обозначающая начальную частоту;
К постоянная, характеризующая крутизну модулирующей функции;
rext(t) прямоугольный видеоимпульс единичной высоты и единичной длительности;
Т длительность сигнала.
τo параметр, определяющий положение видеоимпульса на временной оси.
Это изменение обеспечивает достижение технического результата. Во-первых, доплеровский способ оптимизирован к тональному сигналу, для которого доплеровская деформация сводится лишь к сдвигу частоты отраженного сигнала по отношению к излученному, а использование сложных (широкополосных) сигналов при доплеровской деформации приводит к изменению масштаба сигнала в частотно-временной плоскости; во-вторых, доплеровская деформация ограничивает базу (сложность) используемого излученного сигнала за счет разрушения его фазовой структуры. В-третьих, выбор только ГЧМ-сигнала не позволяет измерять скорость, так как он инвариантен относительно доплеровского эффекта. Только сложный сигнал (3) позволяет получить новое свойство, заключающееся в сведении доплеровской деформации к временным сдвигам взаимно-корреляционной функции (ВКФ) по каждой из инверсной пары ГЧМ сигналов на величину
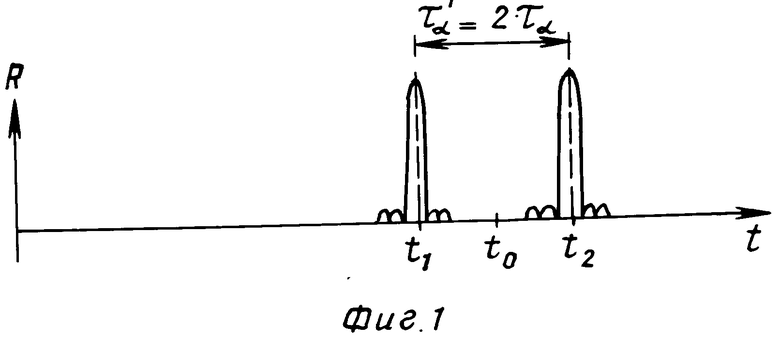
τα ±  (4) соответственно влево и вправо от истинного значения временной tо(см.фиг.1) задержки, определяющей наклонную дальность до дна, при этом сдвиг τ2 максимумов ВКФ относительно tо пропорционален искомой скорости (4). Поэтому дополнительно к первому изменению прототипа внесены следующие: вычисление взаимно-корреля- ционных функций (ВКФ) отраженного сигнала и эталонных, которые представляют собой излученный и сдвинутый по фазе на π/2 излученный сигналы; измерение аргументов t1 и t2 обоих ВКФ, определяющих их максимумы; вычисление скорости движения судна относительно дна по формуле
(4) соответственно влево и вправо от истинного значения временной tо(см.фиг.1) задержки, определяющей наклонную дальность до дна, при этом сдвиг τ2 максимумов ВКФ относительно tо пропорционален искомой скорости (4). Поэтому дополнительно к первому изменению прототипа внесены следующие: вычисление взаимно-корреля- ционных функций (ВКФ) отраженного сигнала и эталонных, которые представляют собой излученный и сдвинутый по фазе на π/2 излученный сигналы; измерение аргументов t1 и t2 обоих ВКФ, определяющих их максимумы; вычисление скорости движения судна относительно дна по формуле
v  при K=1 v
при K=1 v  (5)
(5)
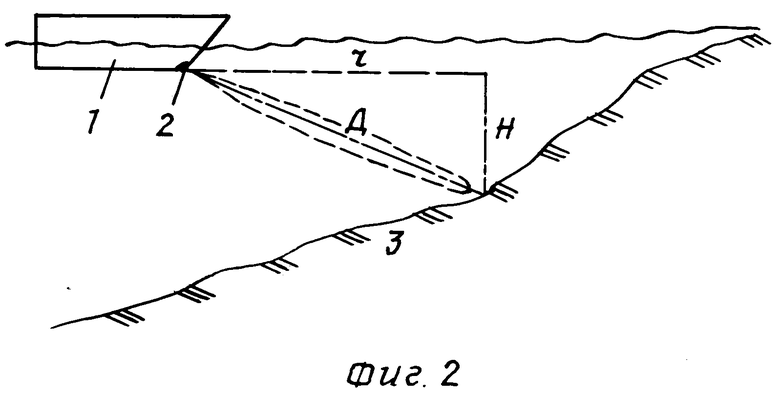
вычисление наклонной (Д) дальности до дна, глубины (Н) места от горизонта антенны в упрежденной точке (см.фиг.2) и расстояния r от антенны до нее упрежденной точки по формулам:
D  ; H D sin γ; r D cosγ (6)
; H D sin γ; r D cosγ (6)
Новая совокупность существенных признаков обеспечивает повышение точности измерения: скорости судна относительно дна, а также наклонной дальности до дна, глубины места от антенны в упрежденной точке и расстояния до нее путем снижения дисперсий ошибки измерения временных задержек ti, i 1,2,
<( -τi)2>
-τi)2> 
 (7) где
(7) где  , τi оценка и истинное значение временной задержки за счет увеличения эффективной Δω2 полосы Фурье сигнала при равных энергий сигнала Е и шума N.
, τi оценка и истинное значение временной задержки за счет увеличения эффективной Δω2 полосы Фурье сигнала при равных энергий сигнала Е и шума N.
При этом обеспечивается однозначное вычисление скорости движения судна относительно дна и определение ориентации судна относительно дна за счет измерения t1 и t2.
Известно, что отношение сигнал/помеха на выходе идеального согласованного фильтра прямо пропорционально отношению сигнал/помеха на его входе и корню квадратному из произведения полосы сигнала W на его длительность Т =
= (8)
(8)
Таким образом, помехоустойчивость прямо пропорциональна базе сигнала W T. Однако известно также, что величина максимального значения сигнала Gf на выходе согласованного фильтра и значение дисперсионного произведения W T(1-α), где α доплеровский параметр, связаны отношением
 (9) где Е энергия сигнала;
(9) где Е энергия сигнала;
<.> операция определения математического ожидания;
S i интегральный синус.
Анализ отношения (9) показывает, что если W˙T(1- α) < 1, то ослабление выходного сигнала не превышает 2 дБ, при W˙T(1- -α) > 1 величина <Gf> пропорциональна [W˙T(1- α)]-1, т.е.

 (10)
(10)
Например, при W˙T(1- α) 2 ослабление сигнала вследствие доплеровской дисперсии (деформации) составит 6 дБ.
Использован сигнал инвариантный доплеровской деформации, искажение которого сводится к временному сдвигу, т.е. потери в помехоустойчивости за счет доплеровской деформации можно считать равными нулю. Это означает, что выигрыш в помехоустойчивости для данного случая будет не менее 6 дБ. В общем случае выигрыш в помехоустойчивости по сравнению с прототипом достигает в  раз, где B W˙T база сложного сигнала. Например, при равных длительностях, а также равных эффективных значениях напряжений сигнала и шума на входе приемника (согласованного фильтра) такое увеличение составит
раз, где B W˙T база сложного сигнала. Например, при равных длительностях, а также равных эффективных значениях напряжений сигнала и шума на входе приемника (согласованного фильтра) такое увеличение составит  раз, где Δf1 полоса сигнала (тонального) прототипа, Δ f2 полоса сигнала, используемого в техническом решении.
раз, где Δf1 полоса сигнала (тонального) прототипа, Δ f2 полоса сигнала, используемого в техническом решении.
Следует подчеркнуть, что не сложный сигнал, а сложный сигнал (3) дает новое качество (см. анализ (9) и (10) доплеровская деформация не искажает тонкую структуру сигнала, а лишь приводит к его временному сдвигу, при этом обеспечивая возможность измерения скорости, в то время как сигнал инвариантный доплеру, не обладает таким свойством. Кроме того снимаются ограничения определяемые отношением (9).
Кроме того, измеряются два параметра t1 и t2, позволяющие рассчитать все искомые величины D, H, r и v по формулам (5), (6).
Такой результат стал возможным благодаря следующей последовательности операции:
1. Излучается ГЧМ-сигнал вида (3)
S(t)=rext sin
sin ln(1-kt)
ln(1-kt) +rext
+rext sin
sin ln(1+kt)
ln(1+kt)
2. Мгновенная частота первого слагаемого (3), преобразованного вследствие доплеровского эффекта (деформации), есть (4)
f1' α˙ω /(1- α˙ K˙ t) (11) а при отсутствии эффекта Доплера (судно не движется)
f1' ω/(1-k˙ t) (12) Кривые (11) и (12) конгруэнтны и могут быть совмещены простым сдвигом во времени на величину (4) =
=  (13) Аналогично для второго слагаемого (3) сдвиг во времени соответствует величине:
(13) Аналогично для второго слагаемого (3) сдвиг во времени соответствует величине: =
=  (14) Сравнивая (13) и (14), обозначим:
(14) Сравнивая (13) и (14), обозначим:  =
= =
= . После отражения от дна принимаемый сигнал вследствие доплеровской деформации и конечной скорости С распространения акустических колебаний сигнала в среде имеет вид:
. После отражения от дна принимаемый сигнал вследствие доплеровской деформации и конечной скорости С распространения акустических колебаний сигнала в среде имеет вид:
S*(t)=sin ln
ln cos
cos ln(1-k(t-τ-τα))
ln(1-k(t-τ-τα)) +
+
+cos ln
ln sin
sin ln(1-k(t-τ-τα))
ln(1-k(t-τ-τα)) +
+
+sin ln
ln cos
cos ln(1+k(t-τ+τα))
ln(1+k(t-τ+τα)) +
+
+cos ln
ln sin
sin ln(1+k(t-τ+τα))
ln(1+k(t-τ+τα)) (15)
(15)
3. При корреляционном сравнении отраженного сигнала (15) с эталоном вида
X1(t)= sin ln(1-kt)
ln(1-kt) +sin
+sin ln(1+kt)
ln(1+kt) (16) корреляционный отклик будет иметь вид
(16) корреляционный отклик будет иметь вид X1(t)·S*(t)dt=sin
X1(t)·S*(t)dt=sin ln
ln cos
cos ln(1-k(t-τ-τα))
ln(1-k(t-τ-τα))
×sin ln(1-kt)
ln(1-kt) dt+cos
dt+cos ln
ln sin
sin ln(1-k(t-τ-τα))
ln(1-k(t-τ-τα))
×sin ln(1-kt)
ln(1-kt) dt+sin
dt+sin ln
ln cos
cos ln(1+k(t-τ+τα))
ln(1+k(t-τ+τα))
×sin ln(1-kt)
ln(1-kt) dt+cos
dt+cos ln
ln sin
sin ln(1+k(t-τ+τα))
ln(1+k(t-τ+τα))
×sin ln(1-kt)
ln(1-kt) dt+sin
dt+sin ln
ln cos
cos ln(1-k(t-τ-τα))
ln(1-k(t-τ-τα))
×sin ln(1+kt)
ln(1+kt) dt+cos
dt+cos ln
ln sin
sin ln(1-k(t-τ-τα))
ln(1-k(t-τ-τα))
×sin ln(1+kt)
ln(1+kt) dt+sin
dt+sin ln
ln cos
cos ln(1+k(t-τ+τα))
ln(1+k(t-τ+τα))
×sin ln(1+kt)
ln(1+kt) dt+cos
dt+cos ln
ln sin
sin ln(1+k(t-τ+τα))
ln(1+k(t-τ+τα))
×sin ln(1+kt)
ln(1+kt) dt (17)
dt (17)
Из выражения (17) видно, что первое и седьмое слагаемые равны нулю вследствие ортогональности сигналов под знаком интеграла слагаемые 3,4,5 и 6 равны нулю (без учета шумовой составляющей) вследствие некоррелируемости сигналов под интегралом из-за противоположного направления модуляции. Таким образом выражение (17) примет вид X1(t)·S*(t)dt=cos
X1(t)·S*(t)dt=cos ln
ln sin
sin ln(1-k(t-τ-τα))
ln(1-k(t-τ-τα))
×sin ln(1-kt)
ln(1-kt) dt+cos
dt+cos ln
ln sin
sin ln(1+k(1-τ+τα))
ln(1+k(1-τ+τα))
×sin ln(1+kt)
ln(1+kt) dt (18)
dt (18)
В приведенных выкладках для простоты была опущена амплитуда сигналов с ее учетом и в момент компенсации задержки получим следующее выражение: X1(t)·S*(t)dt=A·cos
X1(t)·S*(t)dt=A·cos ln
ln R(τ-τα)+A·cos
R(τ-τα)+A·cos ln
ln R(τ+τα)= A·cos
R(τ+τα)= A·cos ln
ln R(τ-τα)+R(τ+τα)
R(τ-τα)+R(τ+τα) (19)
(19)
Нетрудно показать, что отклик при корреляционном сравнении отраженного сигнала S*(t) со вторым эталоном в виде
X2(t)=cos ln(1-kt)
ln(1-kt) +cos
+cos ln(1+kt)
ln(1+kt) (20) будет иметь следующий вид:
(20) будет иметь следующий вид: X2(t)·S*(t)dt= A·sin
X2(t)·S*(t)dt= A·sin ln
ln R(τ-τα)+R(τ+τα)
R(τ-τα)+R(τ+τα) (21) Возведя в квадрат (19) и (21) и суммируя получим
(21) Возведя в квадрат (19) и (21) и суммируя получим
А2 [R(τ-τα) + R(τ+τα)]2 (22) Таким образом, временной сдвиг между откликами составит =2·τα
=2·τα (23)
(23)
Следовательно, скорость судна относительно дна может быть вычислена по выражению (23)
v τα′˙C˙ K/4.
Учет временных сдвигов (13) и (14) позволяет однозначно измерить наклонную дальность до дна.
Таким образом, скорость судна вычисляется по формуле (5), а наклонная дальность по соответствующему выражению (6), при этом дополнительно рассчитываются глубина (расстояние от антенны до дна) в упрежденной точке и расстояния до данной упрежденной точки.
Таким образом, цель изобретения достигнута, получен сверхсуммарный эффект, удовлетворяющий давно назревшим требованиям практики, что позволяет сделать вывод о соответствии изобретения критерию существенные отличия. Кроме того, способ обеспечивает определение скорости и ориентацию относительно дна (тоже навигационная задача) по одному циклу излучения прием.
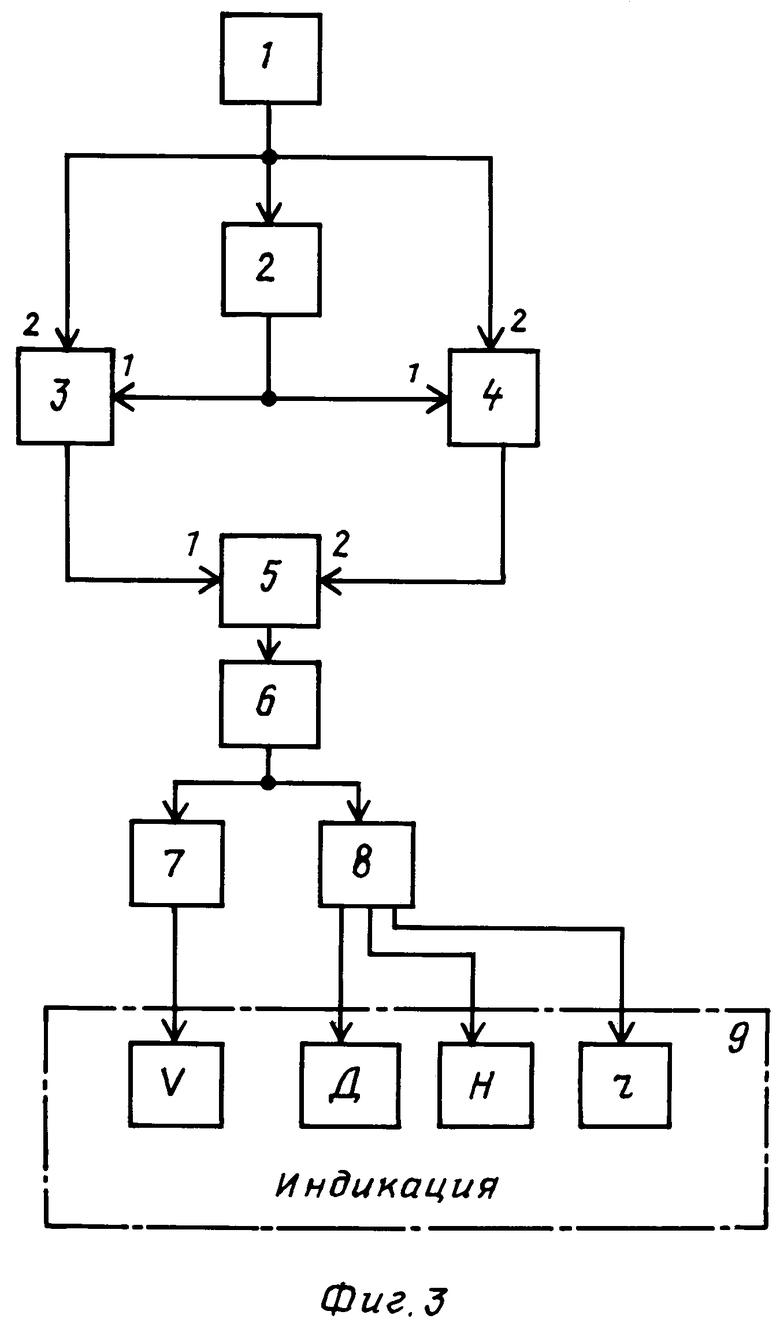
На фиг. 1 приведена временная диаграмма откликов корреляционного сравнения отраженного сигнала с двумя эталонами (16) и (20) соответственно, где t1 временное местоположение первого отклика в выражении (22); t2 временное местоположение второго отклика в выражении (22); t=0 соответствует моменту излучения; tо временное положение, соответствующее наклонной дальности до дна; τα′= 2˙τα удвоенное значение временного сдвига, обусловленного доплеровским эффектом воздействия на ГЧМ-сигнал; на фиг. 2 показаны соотношения измеряемых дополнительных величин, где 1 корпус судна; 2 антенна гидроакустического лага; 3 дно; 4 наклонная дальность Д до дна; 5 глубина места Н от антенны в упрежденной точке или расстояние от горизонта антенны гидроакустического лага (ГЛ) до дна в упрежденной точке; 6 расстояние r от антенны ГЛ до упрежденной точки; на фиг. 3 приведена блок-схема алгоритма, где 1 излучение сложного сигнала вида (3) в направлении движения судна с углом γ наклона в вертикальной плоскости; 2 прием отраженного от дна сигнала вида (15); 3 вычисление взаимно корреляционной К1(τ) функции от отраженного (15) и излученного (3) сигналов (первого эталона) в результате получаем процесс, описываемый выражением (19); 4 вычисление взаимно-корреляционной К2(τ) функции от отраженного (15) и второго (20) эталона, представляющего собой сдвинутый по фазе на π/2 излученный сигнал, в результате получаем процесс, описываемый выражением (21); 5 вычисление суммы квадратов процессов, описываемых выражениями (19) и (21) в результате получаем процесс, описываемый выражением (22); 6 определение аргументов t1 и t2 функции, описываемой выражением (22), соответствующих максимумам ВКФ: К1(τ) и К2(τ) соответственно; 7 вычисление скорости судна относительно дна по формуле (5), 8 вычисление параметров ориентации судна относительно дна по формулам (6); 9 индикация скорости v судна; наклонной дальности Д до дна; расстояния Н от горизонта антенны до дна в упрежденной точке (глубина Н места от антенны до дна в упрежденной точке); расстояние r от антенны до упрежденной точки.
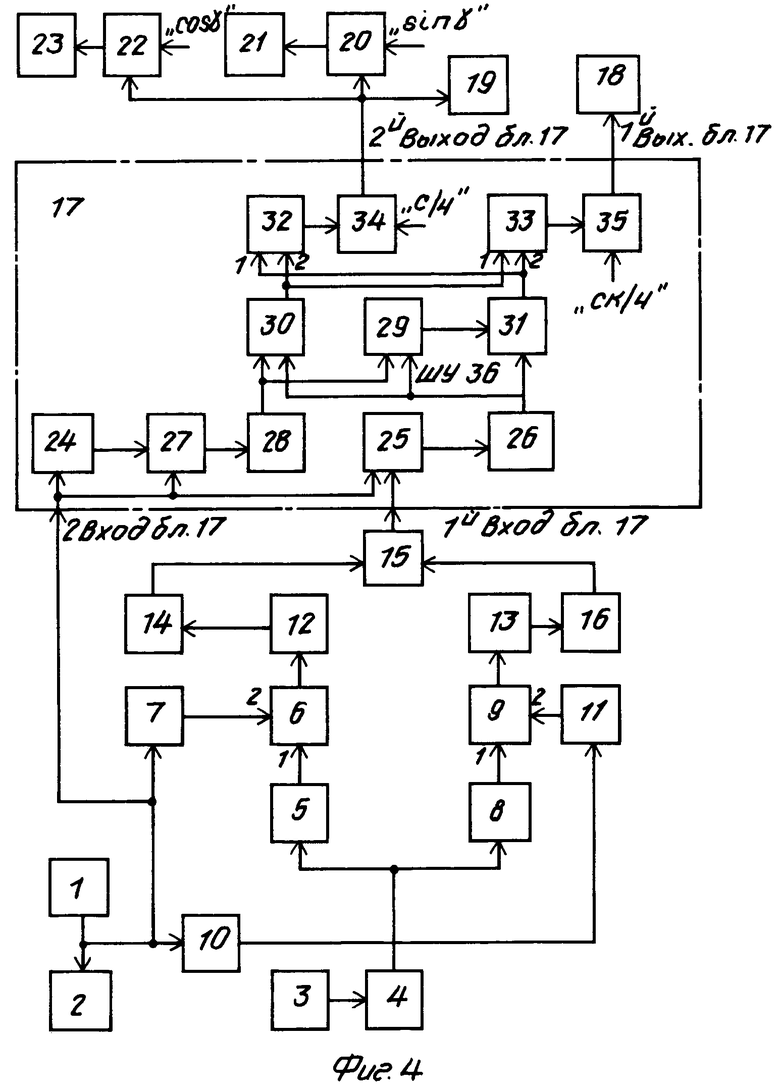
На фиг. 4 представлена схема устройства для осуществления способа.
Оно содержит передатчик 1 сложного сигнала вида (3), излучатель 2, приемник 3, аналого-цифровой преобразователь 4, первую рециркуляционную линию задержки 5, первый умножитель 6, третью рециркуляционную линию задержки 7, вторую рециркуляционную линию задержки 8, второй умножитель 9, фазовращатель на π/2 10, четвертую рециркуляционную линию задержки 11, первый усреднитель 12, второй усреднитель 13, первый квадратор 14, сумматор 15, второй квадратор 16, блок 17 оценки скорости и наклонной дальности, индикатор скорости 18, индикатор наклонной дальности 19, третий умножитель 20, индикатор 21 расстояния от горизонта антенны до дна в упрежденной точке (глубины места от антенны до дна в упрежденной точке); четвертый умножитель 22, индикатор 23 расстояния (горизонтального) от антенны до упрежденной точки, генератор 24 тактовых импульсов (ГТИ), двоичные счетчики (С4) 25, 27, постоянные запоминающие устройства (ПЗУ) 26, 28, управляемые электронные ключи (ЭК) 29, 30, оперативное запоминающее устройство 31 (ОЗУ), второй сумматор 32, вычитатель 33, пятый и шестой умножители 34, 35, шина управления 36.
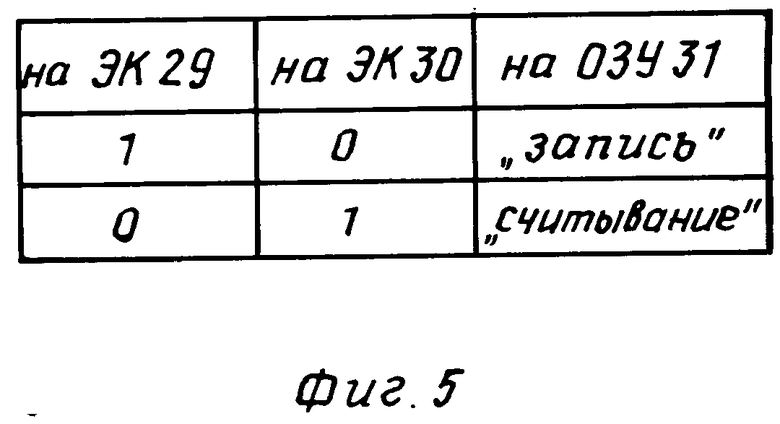
На фиг. 5 изображена таблица состояний управляемых электронных ключей (ЭК) 29 и 30 (см.фиг.4), режим записи или считывания ОЗУ 31.
Способ заключается в выполнении операций согласно блок-схемы алгоритма, приведенной на фиг.3. При этом излученный сигнал (3), кроме излучения в среду под углом γ в вертикальной плоскости к направлению движения, поступает в блоки 3 и 4 на вторые входы, на первые входы которых подается принятый блоком 2 отраженный сигнал вида (15). Блок 3 вычисляет взаимно корреляционную К1(τ) функцию между излученным (3) и отраженным (15) сигналами, в результате на первый вход блока 5 поступает процесс, описываемый выражением (19).
В блоке 4 излученный сигнал (3) сдвигается по фазе на π/2 и вычисляется взаимно корреляционная К2(τ) функция, в результате на выходе образуется процесс, описываемый выражением (21), который поступает на второй вход блока 5.
В блоке 5 вычисляется сумма квадратов процессов (19) и (21), поступивших на его входы, в результате получаем реализацию, описываемую выражением (22).
Блок 6 вычисляет значения t1 и t2 аргументов: функций, описываемой выражением (22) и соответствующих максимумам ВКФ К1(τ) и К2(τ) соответственно. В блоке 7 производится вычисление скорости судна относительно дна по формуле (5). В блоке 8 вычисляются параметры ориентации судна относительно дна по формулам (6). Индикация вычисленных значений осуществляется в блоке 9.
Для упрощения выражений примем К=1, тогда математические выражения примут вид
v  D
D  H=D·sinγ
H=D·sinγ
r D . cos γ.
Устройство, реализующее способ приведено на фиг.4 и состоит из передатчика 1, соединенного с излучателем 2, а также со вторым входом блока 17, а также через третью рециркуляционную линию 7 задержки с вторым входом первого умножителя 6, через фазовращатель на π/2 10 и четвертую рециркуляционную 11 линию задеpжки с вторым входом второго умножителя. Кроме того, в состав устройства входят приемник 3, соединенный через аналого-цифровой преобразователь 4, а также через соответственно первую и вторую рециркуляционные линии задержки с первыми входами соответственно первого 6 и второго 9 умножителей.
При этом выход первого 6 умножителя соединен через последовательно соединенные первый усреднитель 12 и первый квадратор 14 с сумматором 15, второй вход которого соединен через последовательно соединенные второй квадратор 16 и второй усреднитель 13 с выходом второго 9 умножителя.
При этом выход сумматора 15 соединен с первым входом блока 17. Первый выход блока 17 соединен с индикатором 18 скорости, второй выход блока 17 соединен одновременно с индикатором 19 наклонной дальности (до дна) и с третьим 20 умножителем, на второй вход которого подано постоянное значение sin γ, а выход блока 20 соединен с индикатором 21 глубины от горизонта антенны до дна в упрежденной точке, а также с входом четвертого 22 умножителя, на второй вход которого подано постоянное значение cos γ, а выход блока 22 соединен с индикатором 23 расстояния (горизонтального) от антенны до упрежденной точки. При этом блок 17 состоит из двоичного счетчика 25 вход (информационный) которого является первым входом блока 17, при том вход счетчика 25 установки в ноль (исходное положение) соединен с входом установки в ноль счетчика 27 и входом генератора 24 тактовых импульсов (ГТИ) и является вторым входом блока 17.
Кроме того, двоичный счетчик 25 соединен с постоянным запоминающим устройством 26, выход которого является шиной управления (ШУ) 36, соединенной с входами управления управляемых электронных ключей 29 и 30, а также с входом установки режима записи/считывания оперативного запоминающего устройства 31.
Кроме того, генератор 24 тактовых импульсов соединен через информационные входы последовательно включенных двоичный счетчик 27 и постоянное запоминающее устройство 28 одновременно с информационными входами управляемых электронных ключей 29 и 30.
При этом выход управляемого электронного ключа 30 соединен одновременно с вторым входом второго сумматора 32 и первым входом (уменьшаемого) вычитателя 33, на второй вход (вычитаемого) которого подключены одновременно первый вход второго сумматора 32 и выход оперативного запоминающего устройства 31, при этом вход (информационный) последнего соединен с выходом управляемого электронного ключа 29. При этом выход второго сумматора 32 соединен с входом пятого умножителя 34, на второй вход которого подано постоянное значение С/4, а выход пятого 34 умножителя является вторым выходом блока 17. Кроме того, выход вычитателя 33 соединен через шестой умножитель 35 с первым выходом блока 17, при этом на второй вход шестого умножителя 35 подано постоянное значение СК/4.
Работает устройство следующим образом.
Передатчик 1 формирует сигнал и передает его для излучения в среду под углом в вертикальной плоскости в направлении движения на излучатель 2, кроме того, сигнал с передатчика поступает на второй вход блока 17 для установки в исходное состояние двоичных счетчиков 25 и 27 и запуск генератора 24 тактовых импульсов.
Кроме того, излучаемый сигнал поступает на третью рециркуляционную линию задержки 7, а также через фазовращатель 10 на π/2 на четвертую рециркуляционную линию задержки 1.
Принятый приемником 3 отраженный сигнал поступает через аналого-цифровой преобразователь 4 одновременно на первую 5 и вторую 8 рециркуляционные линии задержки (РЛЗ). В момент когда в 5 и 8 РЛЗ записан отраженный от дна сигнал (15), с помощью первых 6 умножителя и усреднителя 12 формируется отклик взаимнокорреляционной К1(τ) функции, поступающий через первый квадратор 14 на вход сумматора 15.
В это же время отраженный от дна сигнал (15) поступает на первый вход второго умножителя 9 на второй вход которого подается излученный, но сдвинутый по фазе на π/2 сигнал с четвертой рециркуляционной линии задержки 11. В результате последующего усреднения во втором усреднителе 13 формируется отклик взаимно корреляционной К2(τ) функции, поступающий через второй квадратор 16 на второй вход сумматора 15. На выходе сумматора 15 формируется процесс, описываемый выражением (22), который поступает на первый вход блока 17 оценки скорости и наклонной дальности. На первом выходе блока 17 формируется значение скорости v судна относительно дна, поступающее на одноименный индикатор 18. На втором выходе блока 17 получаем значение наклонной Д дальности, которое выводится на одноименный индикатор 19, а также поступает на третий умножитель 20, на второй вход которого подано постоянное значение cos γ. С выхода третьего умножителя 20 значение Н глубины места от горизонта антенны в упрежденной точки выводится на одноименный индикатор 21. Кроме того, с второго выхода блока 17 значение Д наклонной дальности поступает еще в четвертый умножитель 22, на второй вход которого подано постоянное значение cos γ, а выход последнего соединен с индикатором 23 расстояния от антенны до упрежденной точки.
Блок 17 оценки скорости и наклонной дальности работает следующим образом.
Импульс с второго входа блока 17 подается одновременно на входы двоичных счетчиков 25 и 27, устанавливая их в ноль, а также на ГТИ 24, запуская его в работу. При этом последовательность тактирующих импульсов поступает на вход двоичного счетчика 27, с его выхода линейно нарастающая последовательность двоичных кодов подается на адресный вход ПЗУ 28, определяя считывание с его информационного выхода линейно нарастающих значений, соответствующих временным интервалам. В момент поступления на первый вход блока 17 первого импульса, соответствующего отклику ВКФ К2(τ) с выхода двоичного счетчика 25 на адресный вход ПЗУ 26 подается двоичный код, определяющий появление на его информационном выходе управляющего слова, записанного в ячейках (первая строка таблицы см.фиг.5).
Через соответствующие линии шины управления 36, с выхода соответствующего разряда ПЗУ 26 импульс подается на управляющий вход управляемого электронного ключа (ЭК) 29 и он открывается, одновременно на управляющий вход ОЗУ 31 подается импульс, удерживающий его в режиме "Запись", и в ОЗУ 31 запоминается значение соответствующее времени прихода первого импульса с выхода ПЗУ 28. В момент прихода второго импульса на первый вход блока 17 с выхода ПЗУ 26 через соответствующие линии ШУ 36 подаются открывающий импульс на ЭК 30 и импульс, удерживающий ОЗУ 31 в режиме "считывание". При этом через ЭК 30 значение, соответствующее времени прихода второго импульса (отклика ВКФ К2(τ) с выхода ПЗУ 28 поступает соответственно на второй вход второго сумматора 32 и первый вход (уменьшаемого) вычитателя 33. Одновременно с выхода ОЗУ 31 на первый вход первого сумматора 32 и второй вход (вычитаемого) вычитателя 33 подается значение, соответствующее времени прихода не первый вход блока 17 первого импульса. Значение, соответствующее сумме t1+t2 и разности t2-t1 поступает соответственно на первые входы пятого и шестого умножителей 34 и 35 на вторые входы которых поданы постоянные значения соответствующих констант С/4, СК/4. Управляемые электронные ключи ЭК 29, 30 могут быть выполнены, например, на основе насыщенного транзисторного ключа и формирователя импульсов 5. С приходом синхросигнала по ШУ 36 формирователя импульсов формирует на своем выходе импульс с заданной длительностью, который замыкает ключ. Реализация передатчика возможна на основе известных генераторов ГЧМ-сигналов.
Реализация остальных элементов известна в радиотехнике.
Использование предлагаемого изобретения позволит повысить точность определения скорости движения судна относительно дна путем снижения дисперсии оценок временных задержек (7) за счет увеличения эффективной Δω2 полосы Фурье-сигнала. Кроме того, повышается помехоустойчивость способа не менее 6 дБ, что достигается путем компенсации потерь, образуемых за счет доплеровской деформации отраженного сигнала. При этом сняты известные ограничения на базу предлагаемого сложного сигнала.
Кроме того, за один цикл излучения приема измеряются две величины, позволяющие рассчитать, кроме скорости v движения судна относительно дна, параметры D, Н и r ориентации судна относительно дна, что важно для навигационных целей. При этом вычисляются параметры D и Н для упрежденной точки и расстояние r до нее (в отличие от корреляционного лага, для которого обнаруженная мель ненужная информация, так как судно уже сидит на мели).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ СУДНА ОТНОСИТЕЛЬНО ДНА | 1992 |
|
RU2037847C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ СУДНА ОТНОСИТЕЛЬНО ДНА | 1992 |
|
RU2040010C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2041478C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ СУДНА ОТНОСИТЕЛЬНО ДНА | 1992 |
|
RU2020507C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ СУДНА ОТНОСИТЕЛЬНО ДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2042959C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2065176C1 |
| СПОСОБ КОРРЕЛЯЦИОННОЙ ОБРАБОТКИ СИГНАЛОВ, ОТРАЖЕННЫХ ОТ БЫСТРОДВИЖУЩИХСЯ ЦЕЛЕЙ | 2005 |
|
RU2293997C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2042960C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ДНА | 1992 |
|
RU2020518C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ЗВУКА В ЖИДКИХ СРЕДАХ | 1992 |
|
RU2020429C1 |
Использование: в гидроакустике. Сущность изобретения: излучается сложный сигнал, состоящий из инверсной пары сдвинутых сигналов с гиперболической частотной модуляцией, что позволяет более точно определить неизмеряемую временную задержку, соответствующую максимуму взаимнокорреляционной функции между отраженным и излученным сигналами. 1 з.п. ф-лы, 5 ил.

где ω начальная частота;
K параметр, характеризующий крутизну модулирующей функции;
T длительность сигнала;
а скорость v определяют по формуле
v c · K (t2 t1) / 4,
где t1 аргумент, соответствующий максимуму взаимно корреляционной функции (ВКФ) между отраженным и излученным сигналами;
t2 аргумент, соответствующий максимуму ВКФ между отраженным сигналом и сдвинутым по фазе на p/2 излученным сигналом;
c конечная скорость распространения акустических колебаний сигнала в среде.
D C (t2 + t1) / 4;
H = D·sinγ;
r = D·cosγ.
| К.А.Виноградов и др | |||
| Абсолютные и относительные лаги | |||
| Справочник | |||
| Л.: Судостроение, 1990, с.22-30. |
