Изобретение относится к гидроакустике.
Известен способ определения скорости движения судна относительно дна, заключающийся в наклонном излучении звуковых сигналов в носовом и кормовом направлениях, приеме отраженных от дна сигналов с двух направлений, вычислении разности частот принятых сигналов и определении скорости по формуле:
v 
 f
f -f
-f (1)
(1)
Способ характеризуется низкой точностью за счет операции измерения частоты принятых сигналов.
Известен способ определения скорости движения судна относительно дна, основанный на наклонном излучении звуковых сигналов в направлении движения судна, приеме отраженных сигналов, определении доплеровского параметра α= fпр/fизл, где fпр частота принятого; в fизл частота излученного сигналов и вычислении скорости путем решения уравнения:
α =  (2) где С скорость распространения сигнала в среде;
(2) где С скорость распространения сигнала в среде;
γ угол наклона излучения (приема);
v искомая скорость движения судна.
Способ характеризуется низкой точностью определения скорости за счет низкой точности измерения частоты принятого сигнала. Кроме того, способ работоспособен при больших соотношениях сигнал/помеха.
Техническим результатом является повышение точности.
Это достигается тем, что излучается сигнал с гиперболической частотной модуляцией (ГЧМ); при вычислении доплеровского параметра используется информация о фазе как излученного, так и отраженного сигналов.
Совокупность ГЧМ-сигнала излучения и информации об изменении фазы отраженного сигнала, вызванном доплеровской деформацией, позволяет повысить точность вычисления скорости за счет повышенной точности определения доплеровского параметра.
Для этого известный способ определения скорости движения судна относительно дна, основанный на наклонном (к направлению движения судна) излучении сигнала в сторону дна, приеме отраженного сигнала, вычислении доплеровского параметра и определении скорости движения судна путем решения уравнения (2) или уравнения:
α  (3) где Vпр, Vизл скорости движения судна при приеме и излучении соответственно;
(3) где Vпр, Vизл скорости движения судна при приеме и излучении соответственно;
γпр, γизл углы наклона характеристики направленности антенны при приеме и излучении соответственно, изменен путем:
излучения ГЧМ-сигнала вида
S(t) A·cos · ln(1-kt)
· ln(1-kt) (4) где Ω и К постоянные величины;
(4) где Ω и К постоянные величины;
А амплитуда.
Измерения сдвига фаз Δ ϕ между принятым и излученным сигналами.
Примем для упрощения выражения К 1 и А 1, тогда излученный сигнал примет вид:
S(t) cos [Ω ln (1 t)] (5) а отраженный сигнал вследствие доплеровской деформации и конечной скорости распространения сигнала в среде имеет вид:
S*(t) sin (Ω lnα) cos [Ω ln (1 t -τ-τ  )] +
)] +
+ cos (Ω lnα) sin [Ω ln (1 t- τ-τ  )] (6) где τ задержка на распространение сигнала;
)] (6) где τ задержка на распространение сигнала;
τ  сдвиг во времени, вызванный доплеровским эффектом,
сдвиг во времени, вызванный доплеровским эффектом,
τα= 
 (7) где α доплеровский параметр,
(7) где α доплеровский параметр,
v искомая скорость судна;
γ угол наклона при излучении и приеме сигналов.
Определение разности фаз излученного (5) и отраженного (6) сигналов произведен путем квадратурной обработки, для этого проведем вычисление синусной и косинусной составляющих корреляционных откликов сравнения отраженного сигнала с излученным, а также отраженного сигнала со сдвинутым на π/2 излученным сигналом.
В результате корреляционный отклик сравнения (5) и (6) будем иметь вид: S(t)·S*(t)dt sin(Ωlnα)
S(t)·S*(t)dt sin(Ωlnα) cos
cos ln(1-t-τ-τα)
ln(1-t-τ-τα) cos
cos ln(1-t)
ln(1-t) dt+ + cos(Ωlnα)
dt+ + cos(Ωlnα) sin
sin ln(1-t-τ-τα)
ln(1-t-τ-τα) cos
cos ln(1-t)
ln(1-t) dt (8)
dt (8)
В выражении (8) второе слагаемое равно нулю вследствие ортогональности сигналов под знаком интеграла. С учетом амплитуды сигналов и в момент компенсации задержки получим синусную составляющую квадратурной обработки: S(t)·S*(t)dt sin(Ωlnα)R(t-τα) (9)
S(t)·S*(t)dt sin(Ωlnα)R(t-τα) (9)
Аналогично корреляционный отклик сравнения (6) со сдвинутым на π/2 сигналом (5) будет равен: sin
sin ln(1-t)
ln(1-t) S*(t)dt sin(Ωlnα)
S*(t)dt sin(Ωlnα) cos
cos ln(1-t-τ-τα)
ln(1-t-τ-τα)
× sin(Ωln(1-t)dt+cos(Ωlnα) sin
sin ln(1-t-τ-τα)
ln(1-t-τ-τα) sin(Ωln(1-t))dt
sin(Ωln(1-t))dt
(10)
В выражении (10) первое слагаемое равно нулю вследствие ортогональности сигналов под знаком интеграла.
С учетом амплитуд сигналов и в момент компенсации задержки получим косинусную составляющую квадратурной обработки: sin
sin ln(1-t)
ln(1-t) S*(t)dt cos(Ωlnα)·R(t-τα) (11)
S*(t)dt cos(Ωlnα)·R(t-τα) (11)
Для определения сдвига фаз вычислим arctg отношения корреляционных откликов синусной (9) и косинусной (11) составляющих квадратурной обработки получим:
Δϕ arctg Ω·lnα (12)
Ω·lnα (12)
Из последнего выражения определим доплеровский параметр
α= exp ( Δ ϕ / Ω ), учитывая к
d exp (K ˙ Δ ϕ / Ω ) (13) в то же время α соответствует выражению (2), поэтому, решая уравнение (2) при найденном значении α, получим искомую величину v скорости движения судна или учитывая ранее измеренные Vизл, γизл и определенное γпр вычислим скорость движения судна относительно дна в момент приема отраженного сигнала по выражению (3) или после преобразований по формуле:
v  1-
1-  exp
exp C/cosγпр (14)
C/cosγпр (14)
Сравнение способа с прототипом позволяет выделить следующие отличительные признаки:
в доплеровском однолучевом способе конкретизирован сигнал с гиперболической частотной модуляцией, известный как сигнал, инвариантный к доплеру, а значит применение ГЧМ-сигнала в существующем способе не позволяет измерить скорость движения судна;
вместо операции определения измерения частоты, характеризуемой невысокой точностью и оптимизированной для больших соотношений сигнал к помехе введена операция вычисления изменения фазы сигнала, обладающая наибольшей чувствительностью к изменению. Нет в природе способа измерения скорости, использующего изменение фазы, т.к. само изменение фазы не дает измерения скорости. Только совокупность свойства ГЧМ-сигнала, превращающего доплеровскую деформацию в логарифмическом масштабе в сдвиг, который в момент компенсации задержки на распространение сигналов, выраженный в виде разности фаз излученного и отраженного сигналов, становится величиной, эквивалентной доплеровскому параметру. При этом разность фаз связана с доплеровским параметром выражением (12).
Сравнение технического решения с известными способами позволяет сделать вывод, что новая совокупность, полученная применением излучаемого ГЧМ-сигнала и операции вычисления доплеровского параметра, обеспечивает получение нового сверхсуммарного эффекта, достижение которого невозможно только использованием ГЧМ-сигнала (он инвариантен относительно доплера) или только фазового метода. Новая совокупность в сочетании с другими неизменяемыми признаками прототипа обеспечивает повышение точности, что подтверждается анализом следующих выражений.
Минимальная дисперсия ошибки измерения задержки в фазовом методе определяется формулой (3):
E (tR-
(tR- )
)
 (15) где Е ˙ математическое ожидание;
(15) где Е ˙ математическое ожидание;
tR,  измеренная задержка и ее оценка;
измеренная задержка и ее оценка;
β эффективная полоса спектра Фурье-сигнала;
Е энергия сигнала;
Nо спектральная плотность мощности шума;
f несущая частота сигнала.
В случае, если не используется информация о фазе несущей частоты отраженного сигнала, то дисперсия ошибки будет значительно превышать величину, которую дает (15) и определяется формулой:
E (tR-
(tR- )
)
 (16) Выигрыш в точности фазового метода измерения составляет
(16) Выигрыш в точности фазового метода измерения составляет
M  1+
1+  (17)
(17)
Для случая логарифмического масштаба по аналогии с (17) выражением выигрыш в точности измерения доплеровского параметра составит:
Mм= 1+  (18) где Ω начальная частота ГЧМ-сигнала;
(18) где Ω начальная частота ГЧМ-сигнала;
βм полоса Меллина сигнала.
Из анализа выражения (18) следует, что чем больше величина, тем больше выигрыш в точности.
Таким образом, цель заявленного технического решения достигнута, получен сверхсуммаpный эффект, удовлетворяющий давно назревшим требованиям практики. Что позволяет сделать вывод о соответствии изобретения критерию "существенные отличия". Кроме того, способ обеспечивает определение скорости движения судна относительно дна по одному циклу излучения прием, что при высокой точности достигается меньшими энергетическими затратами при этом снижается влияние демаскирующего признака работы такого лага и снижается влияние работы лага на другие гидроакустические системы судна.
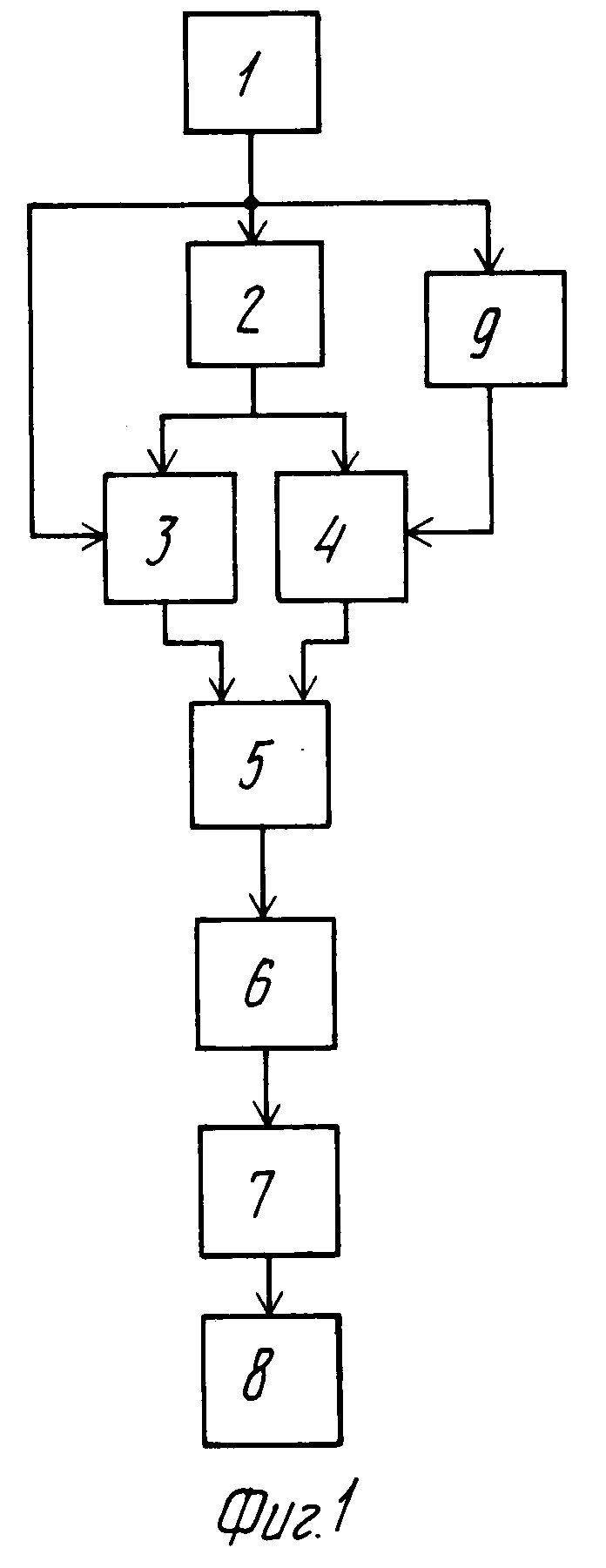
На фиг.1 изображена блок-схема алгоритма, где 1 излучение ГЧМ-сигнала в направлении движения судна с углом γ наклона в вертикальной плоскости;
2 прием отраженного от дна сигнала;
3 вычисление корреляционной К1(τ) функции от отраженного и излученного сигналов;
4 вычисление корреляционной К2(τ) функции отраженного и сдвинутого на π/2 излученного сигнала;
5 вычисление отношения К1(τ)/К2(τ) корреляционных откликов (с выходов блоков 3 и 4) в момент компенсации временной задержки, вызванной распространением сигналов в среде;
6 вычисление Δϕ= arctg [K1(τ)/K2(τ)]
7 вычисление скорости движения судна относительно дна путем решения уравнения:
exp
 (19) или
(19) или
exp
 (20) так для выражения (20) скорость определяется по формуле:
(20) так для выражения (20) скорость определяется по формуле:
v C (1-Vизл·cosγизл/C)·exp
(1-Vизл·cosγизл/C)·exp -1
-1 /cosγпр (21) или v C[B ˙ α 1]/ cos γпр; где B 1-
/cosγпр (21) или v C[B ˙ α 1]/ cos γпр; где B 1-  α exp
α exp
Для уравнения (19) формула вычисления предполагает γизл γпр γ и vизл vпр v и скорость движения судна определяется формулой:
v  (22) где α exp
(22) где α exp
8 индикация величины скорости звука судна относительно дна;
9 фазовращатель, сдвигающий на π/2 излученный сигнал.
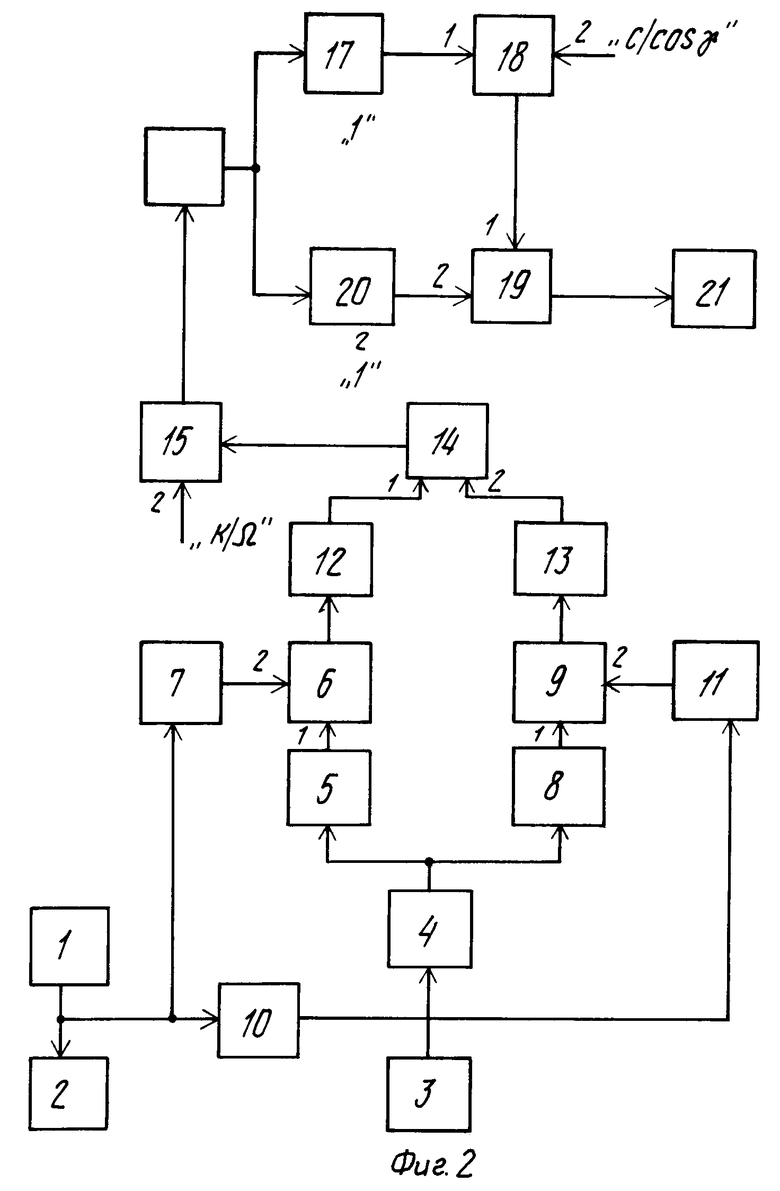
На фиг. 2 представлена схема устройства, реализующего предполагаемый способ по формуле (22), где 1 генератор ГЧМ-сигнала; 2 излучатель; 3 приемник; 4 аналого-цифровой преобразователь (АЦП); 5 первая рециркуляционная линия задержки; 6 первый умножитель; 7 третья рециркуляционная линия задержки; 8 вторая рециркуляционная линия задержки; 9 второй умножитель; 10 фазовращатель (на π/2); 11 четвертая рециркуляционная линия задержки; 12 первый усреднитель; 13 второй усреднитель; 14 вычислитель arctg(x/y); 15 третий умножитель; 16 блок вычисления exp( ˙ ); 17 блок разности (α- 1); 18 четвертый умножитель; 19 блок деления; 20 блок сумматора (α+ 1); 21 индикатор.
Аналогично может быть построено устройство, реализующее заявляемый способ, но по выражению (21), в этом случае блоки 16-19 требуется откорректировать.
Способ заключается в выполнении операций согласно блок-схемы алгоритма, приведенной на фиг. 1. При этом излученный сигнал, кроме излучения в воду, поступает в бл.3 непосредственно и через фазовращатель (на π/2) в бл.4. Вычисляются взаимно-корреляционные (корреляционные) функции в бл.3 и 4 и в момент компенсации временной задержки на распространение вычисляется по формуле (12) arctg их отношения, затем вычисляется по формуле (13) доплеровский параметр, а скорость определяется по формуле (22) или (21) и выводится на индикатор 8.
На фиг.2 приведено устройство, реализующее способ, в котором генератор 1 ГЧМ-сигнала соединен с излучателем 2, а также через рециркуляционную временную задержку 7 с вторым входом первого умножителя 6, кроме того, генератор 1 ГЧМ-сигнала соединен через фазовращатель 10 и четвертую рециркуляционную 11 линию задержки с вторым входом второго умножителя 9, первый вход которого соединен через вторую рециркуляционную 8 линию задержки с выходом АЦП 4, который, кроме того, соединен через первую рециркуляционную 5 линию задержки с первым входом первого умножителя 6, при этом вход АЦП 4 соединен с выходом приемника 3.
Выход первого умножителя 6 соединен через первый усреднитель 12 с первым входом (вход Х) 14 вычислителя arctg(x/y), второй вход (вход Y) которого соединен с выходом второго 13 усреднителя, при этом выход 14 вычислителя arctg(x/y) соединен с первым входом третьего 15 умножителя, на второй вход которого подано постоянное значение K/Ω. Выход третьего 15 умножителя соединен через блок 16 вычисления exp ( ˙ ) с входом уменьшаемого блока 17 разности α-1 и одновременно с входом блока 20 сумматора (α+1), при этом на вход вычитаемого блока 17 разности (α-1) подана значение "1" и на второй вход блока 20 сумматора (α +1) значение "1", при этом выход блока 17 разности (α 1) соединен с первым входом четвертого умножителя 18, на второй вход которого подано значение c/cos γ, а выход четвертого 18 умножителя соединен с первым входом делимого блока 19 деления, второй вход (вход делителя) которого соединен с выходом блока 20 сумматора (α +1), причем выход блока 19 деления соединен с индикатором 21.
Устройство работает следующим образом.
Генератор 1 ГЧМ-сигнала выдает сигнал на излучатель 2 для излучения в носовом направлении под углом γ в вертикальной плоскости, а также через третью 7 рециркуляционную линию задержки на второй вход первого умножителя 6 и, кроме того, через фазовращатель 10, четвертую рециркуляционную 11 линию задержки на второй вход второго 9 умножителя. При этом на первые входы первого 6 и второго 9 умножителей поступает отраженный сигнал от дна, принятый приемником 3, преобразованным АЦПЧ и прошедший соответствующие 5 и 8 рециркуляционные линии задержки. При этом на первые входы умножителей 6 и 9 поступают сигналы типа (6), а на вторые входы: на второй вход первого 6 умножителя поступает сигнал вида (5), а на второй вход второго 9 умножителя сигнал вида (5), но сдвинутый на π/2.
После усреднителей первого 12 и второго 13, в момент компенсации временной задержки за счет применения рециркуляционных линий задержек 7, 5 и 8, 11, на уходы вычислителя 14 arctg(x/y) поступают величины корреляционных откликов: на вход Х значение, соответствующее выражению (9), а на вход Y значение, соответствующее выражению (11). В результате на выходе вычислителя 14 arctg(x/y) получают величину, пропорциональную выражению (12), которое после умножения в третьем 15 умножителе на K/Ω, вычисления exp( ˙ ) в блоке 16 превращается в значение, эквивалентное доплеровскому α параметру.
После этого вычисляется скорость по формуле (22) путем вычисления операций в блоках 17-20. Полученное значение скорости выводится на индикатор 2. Устройство выполнимо, так как использованы элементы известных конструкций: генератор 1 ГЧМ-сигнала, излучатель 2 и приемник 3, АЦП 4, рециркуляционные линии задержки 5, 7, 8, 11, а также умножители 6, 9, 15, 18, блок деления 19, блок сумматора (α+1), блок 17 разности (α 1), фазовращатель 10 на π/2 вычислитель arctg(x/y), блок вычисления exp( ˙ ), индикатор.
Использование изобретения позволяет повысить точность определения скорости движения судна относительно дна в N 1 + раз. Это достигается вычислением доплеровского параметра по разности фаз в логарифмическом масштабе времени в момент компенсации задержки между отраженным и излученным ГЧМ-сигналами. Кроме того, достигается сверхсуммарный дополнительный эффект определение скорости осуществляется за один цикл излучения прием, что снижает энергетические затраты, а также уменьшает значение демаскирующего излучения, кроме того, оказывает меньше мешающее воздействие на другие гидроакустические системы.
раз. Это достигается вычислением доплеровского параметра по разности фаз в логарифмическом масштабе времени в момент компенсации задержки между отраженным и излученным ГЧМ-сигналами. Кроме того, достигается сверхсуммарный дополнительный эффект определение скорости осуществляется за один цикл излучения прием, что снижает энергетические затраты, а также уменьшает значение демаскирующего излучения, кроме того, оказывает меньше мешающее воздействие на другие гидроакустические системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ СУДНА ОТНОСИТЕЛЬНО ДНА | 1992 |
|
RU2042152C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ СУДНА ОТНОСИТЕЛЬНО ДНА | 1992 |
|
RU2040010C1 |
| СПОСОБ КОРРЕЛЯЦИОННОЙ ОБРАБОТКИ СИГНАЛОВ, ОТРАЖЕННЫХ ОТ БЫСТРОДВИЖУЩИХСЯ ЦЕЛЕЙ | 2005 |
|
RU2293997C1 |
| Способ передачи информации с помощью широкополосных сигналов | 2018 |
|
RU2713384C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2065176C1 |
| Способ передачи информации с помощью широкополосных сигналов | 2020 |
|
RU2734699C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ СУДНА ОТНОСИТЕЛЬНО ДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2042959C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2041478C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2042960C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ДНА | 1993 |
|
RU2042153C1 |
Использование: гидроакустика, для определения относительной скорости движения судна. Сущность изобретения: в способе определения скорости движения судна относительно дна, основанном на наклонном к направлению движения излучении сигнала в сторону дна, приеме отраженного сигнала, вычислении доплеровского параметра и определении скорости судна по заданному соотношению известных и измеренных параметров, излучают сигнал с гиперболической частотной модуляцией, а при вычислении доплеровского параметра используют информацию о фазе излученного и отраженного сигналов, или обеспечивают повышение точности определения скорости судна. 2 ил.
СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ СУДНА ОТНОСИТЕЛЬНО ДНА, основанный на наклонном к направлению движения излучении сигнала в сторону дна, приеме отраженного сигнала, вычислении доплеровского параметра α и определении скорости судна путем решения уравнения
где c скорость распространения сигнала;
g угол наклона;
v скорость судна,
отличающийся тем, что излучают сигнал с гиперболической частотной модуляцией вида
где K постоянная, характеризующая крутизну модулирующей функции;
Ω постоянная величина, обозначающая начальную частоту,
а доплеровский параметр вычисляют по формуле
a= exp (K·Δϕ/Ω),
где Δϕ сдвиг фаз между принятым и излученным сигналами.
| Абсолютные и относительные лаги Виноградов К.А | |||
| и др | |||
| Справочник | |||
| Л.: Судостроение, 1990, с.27-30. |
