Изобретение относится к машиностроению и может быть использовано для управления автомобилем.
Известно рулевое управление автомобиля, содержащее передние и задние колеса, соединенные кинематической связью.
Недостатком известного устройства являются недостаточно широкие функциональные возможности, не позволяющие изменять режим взаимодействия передних и задних колес при их повороте.
Цель изобретения расширение функциональных возможностей устройства путем введения возможности изменения кинематической связи передних и задних колес.
Поставленная цель достигается тем, что в рулевом управлении автомобиля, содержащем передние и задние поворотные колеса, соединенные кинематической связью, кинематическое соединение передних и задних колес выполнено в виде зубчатого колеса, находящегося в зацеплении с зубчатой рейкой привода поворота передних колес, на зубчатом колесе установлен ползун, снабженный зубчатой рейкой, находящейся в зацеплении с концентрически установленной шестерней, ползун с помощью продольной тяги шарнирно соединен с зубчатым сектором в зоне зубчатого венца, находящимся в зацеплении с зубчатой рейкой привода поворота задних колес, при этом зубчатый сектор повторно закреплен на раме автомобиля. Ползун при этом может быть выполнен в виде дуги, радиус которой равен длине продольной тяги.
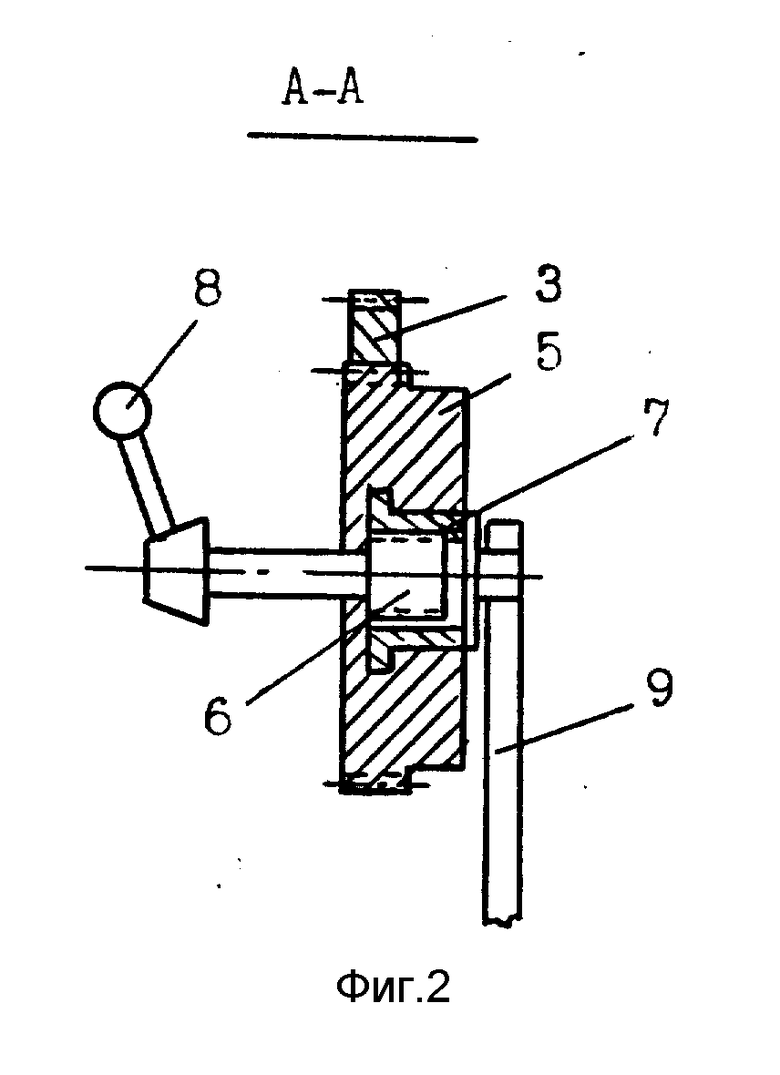
На фиг. 1 представлена кинематическая схема рулевого управления автомобиля; на фиг. 2 разрез по А-А фиг. 1.
Рулевое колесо 1 через шестерню 2 соединено с зубчатой рейкой 3 привода передних колес автомобиля 4. Рейка 3 соединена с зубчатым колесом 5, на котором размещена шестерня 6, соединенная с зубчатой рейкой ползуна 7. На валу шестерни 6 закреплена рукоятка управления 8. Ползун 7 с помощью продольной тяги 9 соединен с зубчатым сектором 10, находящимся в зацеплении с зубчатой рейкой 11 привода поворота задних колес 12. Ползун 7 выполнен в виде дуги радиуса R, равного длине продольной тяги 9.
Заявляемое устройство работает следующим образом.
Исходным положением является такое положение ползуна 7, когда центр шарнира продольной тяги 9 совпадает с центром 0 вращения зубчатого колеса 5 и шестерни 6. В этом положении при повороте рулевого колеса 1 и колес 4 зубчатая рейка 4 поворачивает зубчатое колесо 5. Продольная тяга 9 остается неподвижной, зубчатый сектор 10, рейка 11 и колеса 12 зафиксированы неподвижно. Вращая рукоятку 8, можно с помощью шестерни 6 переместить ползун 7 вправо или влево от нейтрального положения. Этим производится выбор кинематического режима поворота задних колес 12. При перемещении ползуна 7 вправо (как показано на фиг. 1) передние колеса 4 и задние колеса 12 поворачиваются в одном направлении, что позволяет двигаться автомобилю боком, облегчая переход в другой ряд движения или парковку.
При перемещении ползуна 7 влево от центра задние колеса 12 получают возможность поворачиваться в противоположном направлении относительно передних колес 4. При этом вдвое уменьшается радиус поворота.
Таким образом, с помощью предлагаемого механизма путем вращения рукоятки 8 можно выбрать один из четырех режимов управления автомобилем:
а) ползун 7 в нейтральном положении при повороте передних колес 4, задние колеса 12 не поворачиваются;
б) ползун 7 в крайнем левом положении при повороте передних колес 4, задние колеса 12 поворачиваются на тот же угол во встречном направлении (для уменьшения радиуса поворота);
в) ползун 7 в крайнем правом положении при повороте передних колес 4, задние колеса 12 поворачиваются в том же направлении на тот же угол (для движения боком);
г) ползун 7 смещен влево на часть расстояния от нейтрального положения до крайнего правого, например, наполовину. В этом режиме при повороте передних колес 4 задние колеса 12 поворачиваются в ту же сторону, но на меньший угол (для предотвращения заноса при крутых поворотах).
Предлагаемое техническое решение по сравнению с известными обладает следующими преимуществами:
простотой конструкции и широкими функциональными возможностями;
жесткой кинематической схемой, повышающей надежность управления;
плавностью переключения режимов функционирования, что повышает безопасность пользования заявляемым рулевым управлением.
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМЫХ КОЛЕС | 1999 |
|
RU2168437C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2012 |
|
RU2517396C1 |
| РУЛЕВОЙ МЕХАНИЗМ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2271954C1 |
| РУЛЕВОЕ УПРАВЛЕНИЕ ТРАНСПОРТНОГО СРЕДСТВА СО ВСЕМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 1994 |
|
RU2092360C1 |
| КОЛЕСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2407668C2 |
| Командный блок устройства управления передней опорой шасси самолета (варианты) | 2018 |
|
RU2695967C1 |
| Рулевое управление транспортного средства со всеми управляемыми колесами | 1987 |
|
SU1497091A1 |
| ГУСЕНИЧНЫЙ ТРАКТОР | 2008 |
|
RU2385249C1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2565631C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ | 2004 |
|
RU2271955C1 |
Использование: изобретение относится к машиностроению, а более конкретно - к автомобилестроению и может быть использовано при создании системы рулевого управления автомобиля. Сущность: рулевое колесо 1 через шестерню 2 соединено с зубчатой рейкой 3 привода поворота передних колес автомобиля 4. Рейка 3 соединена с зубчатым колесом 5, на котором размещена шестерня 6, соединенная с зубчатой рейкой ползуна 7. На валу шестерни 6 закреплена рукоятка управления. Ползун 7 с помощью продольной тяги 9 соединен с зубчатым сектором 10, находящимся в зацеплении с зубчатой рейкой 11 привода поворота задних колес 12. Ползун 7 выполнен в виде дуги радиуса R, равного длине продольной тяги 9. 1 з.п. ф-лы, 2 ил.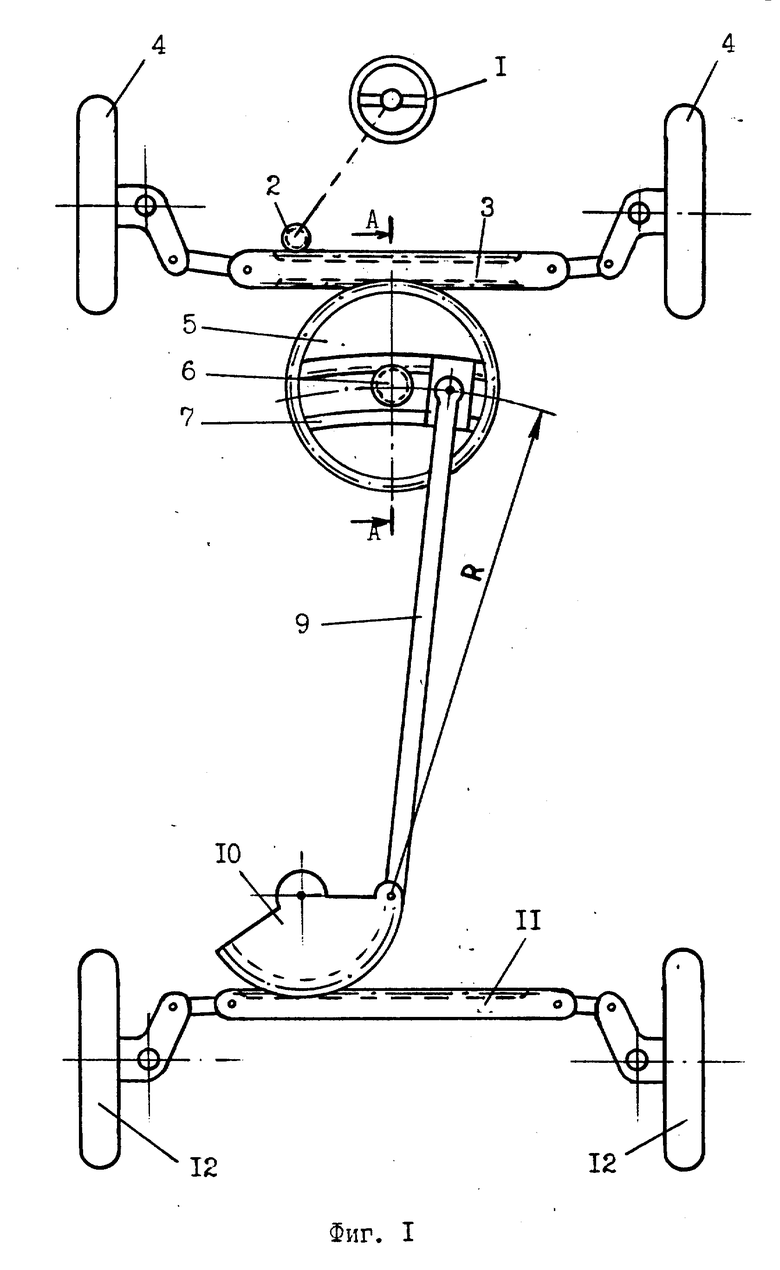
| Артоболевский И.И | |||
| Механизмы в современной технике | |||
| - М.: Наука, 1970, т | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ КОЛИЧЕСТВА ПРОХОДЯЩЕГО ПАРА В ТРУБАХ И НАГРУЗОК ПАРОВЫХ КОТЛОВ | 1921 |
|
SU595A1 |
