Изобретение относится к авиационной технике, а именно, к устройству управления передней опорой шасси самолета при наземном движении самолета в режимах «руление» и «взлет-посадка».
Известна система управления передней опорой шасси самолета с командным блоком, содержащая установленные по левому и правому бортам и механически связанные между собой рукоятки управления, карданно-шлицевые валы, трехплечую качалку, к двум плечам которой с помощью тяг через рычаги подсоединены валы командных датчиков, а к третьему плечу подсоединен шток агрегата центрирования. Шток имеет на свободном конце проточку, с которой взаимодействует толкатель концевого выключателя, служащего датчиком нейтрального положения рукояток (SU №1504935 А1, 27.09.2000).
К недостаткам известного технического решения ведущей рулевой колонки и ее коммутации с другими элементами устройства управления передней опоры шасси самолета относится следующее. В процессе управления рулежным устройством от рукоятки рулевой колонки движущегося с большой скоростью на взлете и посадке самолета, чтобы не допустить движение самолета за пределы взлетно-посадочной полосы пилоту необходимо постоянно контролировать угол поворота колес, тем самым уделяя меньше времени контролю других параметров самолета.
Известен командный блок устройства управления передней опорой шасси самолета, содержащий штурвалы управления самолетом с трехпозиционными переключателями режимов работ системы управления рулежным устройством, установленные по левому и правому бортам кабины рукоятки управления рулежным устройством, соединенные через редукторы между собой жесткой механической проводкой, командные датчики для режима «взлет-посадка» под педалями и для режима «руление», связанные с рукоятками управления, центрирующий цилиндр, механически связанный с рукоятками, для возврата их и валов командных датчиков для режима «руление» в нейтральное положение (Руководство по летной эксплуатации самолета Ил-86. М. :Издательство Машиностроение, 2-е издание, 1980, раздел 10, с. 2-6, рис. 10.10-2),
Недостатками этой системы является то, что пилоту необходимо помнить в каком положении находится трехпозиционный переключатель, чтобы при необходимости переключить систему в режим «руление», «взлет-посадка» или выключить. При выполнении скоротечных процессов взлета, посадки или руления велика вероятность ошибки, что может привести к аварийным ситуациям, что снижает безопасность полетов. Кроме того, наличие двух редукторов, по одному под каждой ручкой, а также необходимость изменения передаточного отношения от рукояток к валам командных датчиков для режима «руление» в двух местах - в редукторах и соединении валов датчиков с проводкой между рукоятками приводят к усложнению системы, увеличению ее веса и габаритов.
Известна система управления передней опорой шасси самолета с командным блоком, содержащая штурвалы управления с переключателями, рукоятки управления, колонки которых кинематически соединены между собой и с центрирующим цилиндром, также кинематически связанные между собой и с входными валами датчиков малых углов поворота стойки шасси. Система управления снабжена механизмом переключения режимов, кинематически связанным с колонкой одной из рукояток управления и имеющим магнитно-управляемые выключатели, и механизмом подключения задающих датчиков больших углов поворота стойки шасси, кинематически связанным с колонкой другой рукоятки управления и с дополнительным центрирующим цилиндром (RU 2070140 С1, опубл. 10.12.1996)
Известно устройство управления передней опорой шасси самолета с командным блоком, содержащее установленные по правому и левому бортам кабины рукоятки, механически связанные между собой, командные датчики, концевые выключатели, центрирующий цилиндр, а также механизм центрирования вала командного датчика под рукояткой. Концевые выключатели, центрирующий цилиндр, механизм центрирования вала командного датчика размещены в одном блоке с одним входным и двумя выходными элементами. Входной элемент выполнен в виде колонки, жестко соединенной с шестерней редуктора и с рукояткой. Один выходной элемент является продолжением колонки входного элемента, кинематически связан с рукояткой по другому борту. Второй выходной элемент соединен с валом командного датчика. Механизм центрирования вала командного датчика в нейтральном положении выполнен в виде двух подпружиненных качалок и упора между ними (RU 2395428 С1, опубл. 27.07.2010).
Известные система управления передней опорой шасси самолета и устройство управления имеют ряд недостатков, к числу которых относятся повышенная материалоемкость, относительная конструктивная сложность и некомпактность устройства управления, увеличенное количество деталей и конструктивная сложность, в частности, узла сопряжения рулевой колонки с центрирующими цилиндрами соответственно командного датчика и рулевой колонки и механической связи рулевых колонок для согласованного управления передней опорой шасси самолета, что снижает его надежность и безопасность работы устройства при длительной эксплуатации.
Задачей настоящего изобретения является разработка командного блока устройства управления передней опорой шасси самолета, обеспечивающего повышение безопасности и надежности, а также удобства управления поворотом колес передней опоры шасси при одновременном повышении компактности, снижении материалоемкости, трудоемкости изготовления устройства.
Поставленная задача решается тем, что командный блок устройства управления передней опорой шасси самолета, согласно изобретению, выполнено двухрежимным с возможностью управления в двух разноскоростных режимах движения самолета «руление» и «взлет-посадка», содержит две выведенные на пульт управления, разнесенные по бортам самолета и установленные каждая на своей рулевой колонке рукоятки ручного управления в режиме «руление», выполненные по числу рулевых колонок системы мест педального управления в режиме «взлет-посадка», независимые от ручного управления, а также не менее чем один переключатель режимов управления, не менее чем один включатель/выключателя командного блока устройства управления, командные датчики по числу рукояток и мест педального управления, центрирующие цилиндры, в том числе, по меньшей мере, один из них сообщенный с одной рулевой колонкой и по одному на каждый из перечисленных командных датчиков и кроме того систему механической связи рулевых колонок для согласованного управления передней опорой шасси самолета, при этом каждая рукоятка прикреплена к рулевой колонке над пультом управления, а рулевая колонка пропущена через пол кабины и с возможностью поворотов подвижно закреплена не менее чем на двух опорах, одна из которых выполнена в верхней зоне пульта управления, а другая размещена в нижней части рулевой колонки, которая прикреплена нижним концом к силовой конструкции фюзеляжа, кроме того, по меньшей мере, одна рулевая колонка сообщена с переключателем режимов управления с возможностью передачи управляющих команд последнему, для чего переключатель неподвижно прикреплен к силовой конструкции пола, причем каждая рулевая колонка в нижней половине содержит три втулки, верхняя и средняя из которых введены в подвижное зацепление с образованием шарнира двухрежимного управления, для чего верхняя из указанных втулок снабжена в нижней части кольцевым приливом с консольным упором и жестко зафиксирована на рулевой колонке, а средняя втулка выполнена поворотной и снабжена в верхней части ответным кольцевым приливом с разомкнутым контуром, образующим паз для заведения консольного упора с угловым сектором а паза кольцевого прилива ведомой средней втулки шарнира, превышающем угловой сектор β ширины консольного упора ведущей верхней втулки на угол К, достаточный для переключения управления передней опорой шасси самолета из режима «взлет-посадка» в режим «руление» и определенный в угловом диапазоне, удовлетворяющем условию (α-β)=2К, где К=(5÷11)°, причем средняя втулка ниже прилива с пазом содержит жестко связанную с ней шестерню внешнего зацепления, образующую вместе с зубчатой рейкой, поводком и валом командного датчика систему преобразования командных поворотов втулки рулевой колонки в возвратные угловые перемещения вала упомянутого командного датчика, кроме того средняя втулка снабжена вильчатым рычагом для связи с центрирующим цилиндром командного датчика, а нижняя втулка установлена и жестко закреплена на каждой из рулевых колонок, при этом, по меньшей мере, одна из указанных втулок, установленная на ведущей колонке, снабжена жестко закрепленной качалкой, выполненной в виде двуплечего рычага первого рода, к одному из плеч которого шарнирно прикреплен концевик тяги системы механической связи рулевых колонок, а другое плечо связано с центрирующим цилиндром рулевой колонки, при этом нижняя втулка ответной ведомой рулевой колонки, снабжена качалкой в виде одноплечего рычага для прикрепления концевика тяги системы механической связи рулевых колонок, причем допустимый угол рабочего поворота и длина указанного рычага приняты достаточными для поворота подвижной средней втулки и кинематически связанного с ней командного датчика с возможностью поворота передней опоры шасси на требуемый угол в разрешенном угловом диапазоне поворотов последней в режиме «руление».
При этом в режиме «взлет-посадка» консольный упор верхней втулки шарнира, неподвижно закрепленной на рулевой колонке, может быть расположен в пазу прилива средней втулки в нейтральном положении с образованием двух симметричных угловых зазоров со стенками паза, достаточных для педального управления передней опорой шасси самолета в режиме «взлет-посадка», выполняемого в дозволенном для данного режима угловом диапазоне, а в режиме «руление» при ручном управлении и выполнении поворотов опоры шасси в полном, соответственно более широком угловом диапазоне, дозволенном для режима «руление», упомянутый упор ведущей верхней втулки, попеременно примкнут к одной из стенок сектора ответного прилива ведомой средней втулки с возможностью передачи через шарнир от верхней втулки к средней командного крутящего момента в режиме «руление».
Разрешенный угловой сектор взаимных поворотов элементов шарнира рулевой колонки передней опоры шасси в режиме «руление» самолета может быть принят не менее ±67° и в (1,35÷1,5) раза превышающем угловой сектор поворотов управляемой передней опоры шасси в указанном режиме наземного движения самолета.
Включатель/выключатель командного блока устройства управления передней опорой шасси самолета может быть выполнен дублированным, установленным на штурвалах с возможностью приведения в действие и/или выключения системы управления передней опорой шасси, производимого с места первого или второго пилота.
Поставленная задача командного блока устройства управления передней опорой шасси самолета по второму варианту решается тем, что согласно изобретению, командный блок устройства управления выполнен двухрежимным с возможностью управления в двух разноскоростных режимах движения самолета «руление» и «взлет-посадка», содержит две выведенные на пульт управления, разнесенные по бортам самолета и установленные каждая на своей рулевой колонке рукоятки ручного управления в режиме «руление», выполненные по числу рулевых колонок системы мест педального управления в режиме «взлет-посадка», независимые от ручного управления, а также не менее чем один переключатель режимов управления, не менее чем один включатель/выключатель устройства управления, командные датчики по числу рукояток и мест педального управления, центрирующие цилиндры, в том числе, по меньшей мере, один из них сообщенный с одной рулевой колонкой устройства управления и по одному на каждый из перечисленных командных датчиков и кроме того систему механической связи рулевых колонок для согласованного управления передней опорой шасси самолета, при этом каждая рулевая колонка в нижней половине содержит три втулки, верхняя и средняя из которых введены в подвижное зацепление с образованием шарнира двухрежимного управления, для чего верхняя из указанных втулок снабжена в нижней части кольцевым приливом с консольным упором и жестко зафиксирована на рулевой колонке, а средняя втулка выполнена поворотной и снабжена в верхней части ответным кольцевым приливом с разомкнутым контуром, образующим паз для заведения консольного упора с угловым сектором α паза кольцевого прилива ведомой средней втулки шарнира, превышающем угловой сектор β ширины консольного упора ведущей верхней втулки на угол К, достаточный для переключения управления передней опорой шасси самолета из режима «взлет-посадка» в режим «руление», причем указанная средняя втулка ниже прилива с пазом содержит жестко связанную с ней шестерню внешнего зацепления, образующую вместе с зубчатой рейкой, поводком и валом командного датчика систему преобразования командных поворотов втулки рулевой колонки в возвратные угловые перемещения вала упомянутого командного датчика, при этом шестерня внешнего зацепления средней втулки каждой рулевой колонки выполнена радиусом Rш.РК и наделена зубчатым венцом с угловой частотой зубьев γз.ш.РК, определенной в диапазоне значений γз.ш.РК = (6,69±9,55) [ед/рад], при этом командный угол αш.РК поворота шестерни каждой рулевой колонки, равный углу поворота рукоятки рулевого управления, задаваемый пилотом, через связанную с шестерней зубчатую рейку, определяет угол αр.в.д. поворота рычага вала командного датчика устройства управления передней опорой шасси, через соотношение радиусов Rш.РК/Rр.в.д. из выражения
αр.в.д.=(Rш.РК/Rр.в.д.)⋅αш.РК = (0,474÷0,66)⋅αш.РК [рад], где Rр.в.д. - радиус рычага вала командного датчика устройства управления; кроме того средняя поворотная втулка каждой рулевой колонки снабжена вильчатым рычагом для связи с центрирующим цилиндром командного датчика, а нижняя втулка установлена и жестко закреплена на каждой из рулевых колонок.
При этом каждая рукоятка может быть прикреплена к рулевой колонке над пультом управления, а рулевая колонка пропущена через пол кабины и с возможностью поворотов подвижно закреплена не менее чем на двух опорах, одна из которых выполнена в верхней зоне пульта управления, а другая размещена в нижней части рулевой колонки, которая прикреплена нижним концом к силовой конструкции фюзеляжа, причем, по меньшей мере, одна рулевая колонка сообщена с переключателем режимов управления с возможностью передачи управляющих команд последнему, для чего переключатель неподвижно прикреплен к силовой конструкции пола, кроме того, по меньшей мере, нижняя втулка, установленная на ведущей рулевой колонке, снабжена жестко закрепленной качалкой, выполненной в виде двуплечего рычага первого рода, к одному из плеч которого шарнирно прикреплен концевик тяги системы механической связи рулевых колонок, а другое плечо связано с центрирующим цилиндром рулевой колонки, а нижняя втулка ответной ведомой рулевой колонки, снабжена качалкой в виде одноплечего рычага для прикрепления концевика тяги системы механической связи рулевых колонок, причем допустимый угол рабочего поворота и длина указанного рычага приняты достаточными для поворота подвижной средней втулки и кинематически связанного с ней командного датчика с возможностью поворота передней опоры шасси на требуемый угол в разрешенном угловом диапазоне поворотов последней в режиме «руление».
В режиме «взлет-посадка» консольный упор верхней втулки шарнира, неподвижно закрепленной на рулевой колонке, может быть расположен в пазу прилива средней втулки в нейтральном положении с образованием двух симметричных угловых зазоров со стенками паза, достаточных для педального управления передней опорой шасси самолета в режиме «взлет-посадка», выполняемого в дозволенном для данного режима угловом диапазоне, а в режиме «руление» при ручном управлении и выполнении поворотов опоры шасси в полном, соответственно более широком угловом диапазоне, дозволенном для режима «руление», упомянутый упор ведущей верхней втулки, попеременно примкнут к одной из стенок сектора ответного прилива ведомой средней втулки с возможностью передачи через шарнир от верхней втулки к средней командного крутящего момента в режиме «руление», а угловой сектор α паза кольцевого прилива ведомой средней втулки шарнира выполнен достаточным для переключения управления передней опорой шасси самолета из режима «взлет-посадка» в режим «руление» и определен в угловом диапазоне, удовлетворяющем условию (α-β)=2К, где К=(5÷11)°, β - угловой сектор ширины консольного упора ведущей верхней втулки шарнира, при этом разрешенный угловой сектор взаимных поворотов элементов шарнира рулевой колонки передней опоры шасси в режиме «руление» самолета принят не менее ±67° и в (1,35÷1,5) раза превышающем угловой сектор поворотов управляемой передней опоры шасси в указанном режиме наземного движения самолета.
Включатель/выключатель командного блока устройства управления передней опорой шасси самолета может быть выполнен дублированным, установленным на штурвалах с возможностью приведения в действие и/или выключения системы управления передней опорой шасси, производимого с места первого или второго пилота.
Технический результат, достигаемый приведенной совокупностью признаков, заключается в разработке командного блока устройства управления передней опорой шасси самолета, обеспечивающего повышение удобства и безопасности управления поворотом колес при разноскоростных режимах движения самолета, а также повышение надежности работы командного блока устройства при большей его компактности и снижении материалоемкости, трудоемкости изготовления устройства.
Сущность изобретения поясняется чертежами, где:
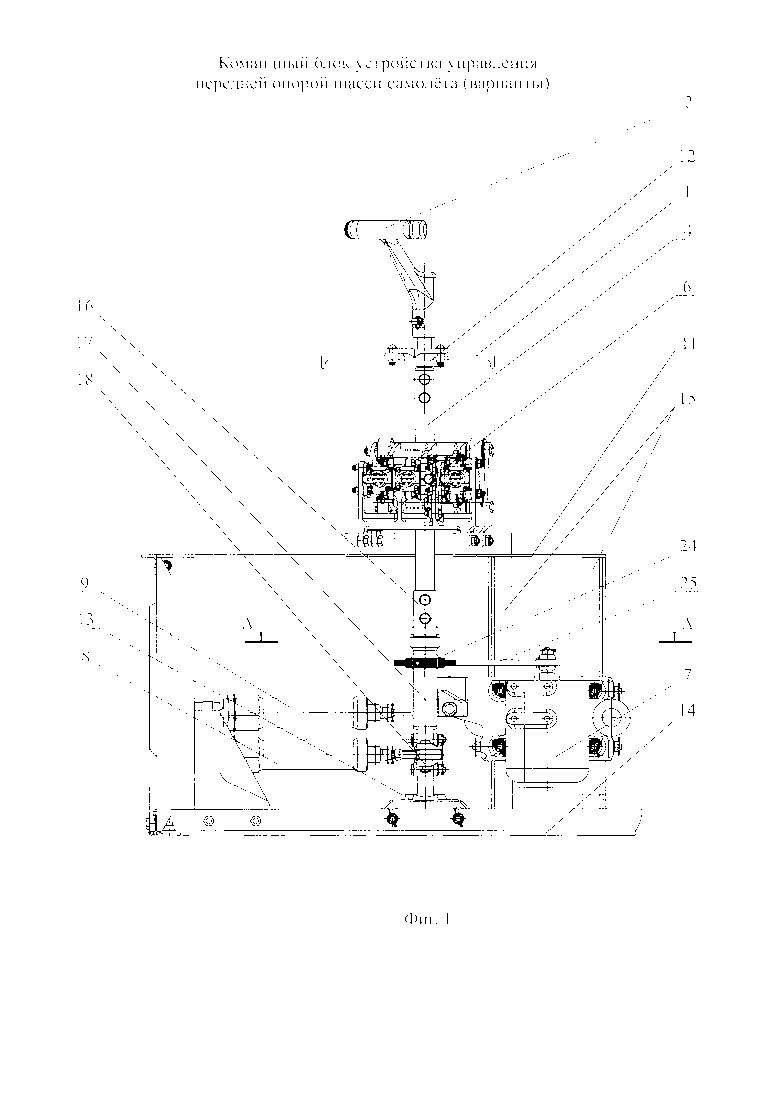
на фиг. 1 изображена ведущая рулевая колонка устройства управления передней опорой шасси самолета, расположенная по левому борту, вид сбоку;
на фиг. 2 - ведомая рулевая колонка устройства управления передней опорой шасси самолета, расположенная по правому борту, вид сбоку;
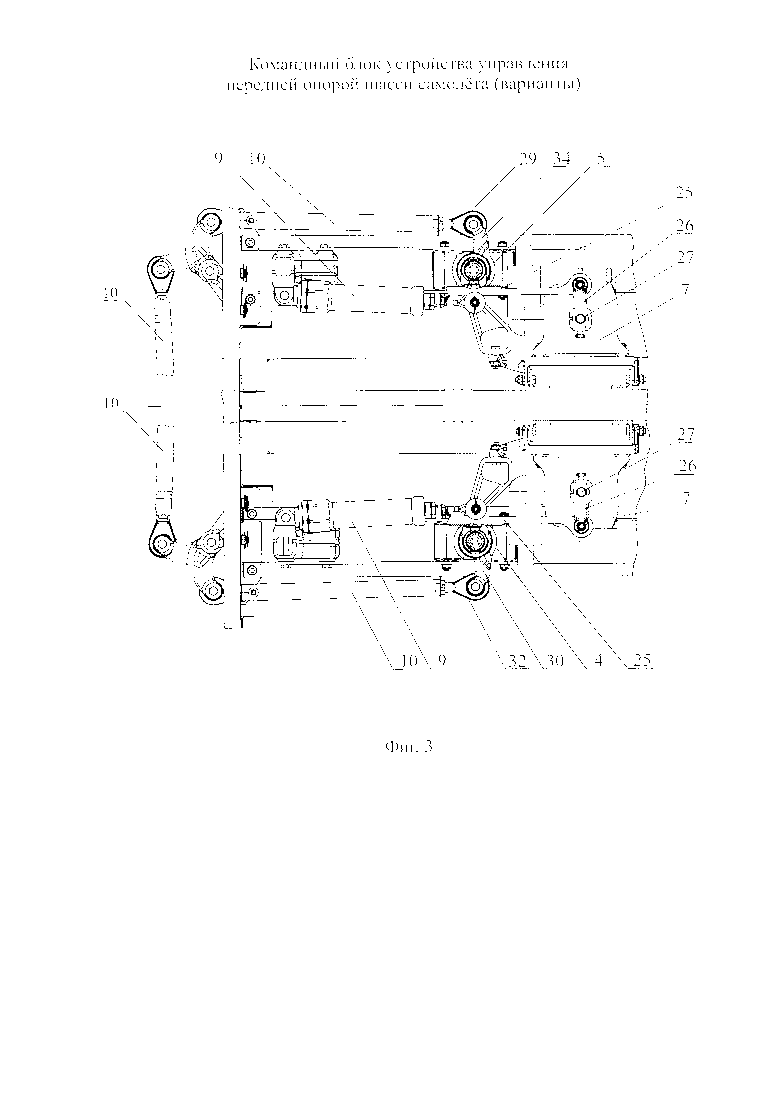
на фиг. 3 - система механической связи рулевых колонок, вид сверху;
на фиг. 4 - вид по А-А на фиг. 1, поперечное сечение;
на фиг. 5 - нижняя половина ведущей рулевой колонки со втулками, продольный разрез.
Командный блок устройства управления передней опорой шасси самолета в группе изобретений, объединенных единым творческим замыслом, выполнен двухрежимным с возможностью управления в двух разноскоростных режимах движения самолета «руление» и «взлет-посадка». Командный блок устройства управления содержит две выведенные на пульт 1 управления рукоятки 2 и 3 ручного управления в режиме «руление». Рукоятки 2 и 3 ручного управления установлены по левому и правому бортам самолета на своей рулевой колонке 4 и 5 соответственно. Командный блок устройства управления содержит выполненные по числу рулевых колонок независимые от ручного управления системы мест педального управления в режиме «взлет-посадка» (на чертежах не показано). Командный блок устройства управления содержит также не менее чем один переключатель 6 режимов управления, не менее чем один включатель/выключателя командного блока устройства управления (на чертежах не показано), командные датчики 7 по числу рукояток 2, 3 и мест педального управления, центрирующие цилиндры 8 и 9 и систему 10 механической связи рулевых колонок 4 и 5 для согласованного управления передней опорой шасси самолета.
Каждая рукоятка 2, 3 командного блока устройства управления прикреплена к своей рулевой колонке 4, 5 над пультом 1 управления. Рулевая колонка 4, расположенная по левому борту, выполнена ведущей. Рулевая колонка 5, расположенная по правому борту, выполнена ведомой. Каждая рулевая колонка 4, 5 пропущена через пол 11 кабины самолета и с возможностью поворотов подвижно закреплена не менее чем на двух опорах 12 и 13. Опора 12 выполнена в верхней зоне пульта 1 управления. Опора 13 размещена в нижней части каждой рулевой колонки 4, 5, которые прикреплены нижним концом к силовой конструкции 14 фюзеляжа. Центрирующий цилиндр 8 сообщен с ведущей рулевой колонкой 4 командного блока устройства управления. Центрирующий цилиндр 9 выполнен по одному на каждый командный датчик 7. Ведущая рулевая колонка 4 сообщена с переключателем 6 режимов управления с возможностью передачи управляющих команд последнему, для чего переключатель 6 неподвижно прикреплен к силовой конструкции 15 пола 11 кабины самолета.
Каждая колонка 2 в нижней половине содержит три втулки 16, 17, 18. Верхняя и средняя втулки 16 и 17 соответственно введены в подвижное зацепление с образованием шарнира 18 двухрежимного управления. Для этого верхняя втулка 16 снабжена в нижней части кольцевым приливом 20 с консольным упором 21 и жестко зафиксирована на рулевой колонке 4, 5. Средняя втулка 17 выполнена поворотной и снабжена в верхней части ответным приливом 22 с разомкнутым контуром. Указанный контур образует паз 23 для заведения консольного упора 21 с угловым сектором α паза 23 кольцевого прилива 22 ведомой средней втулки 17 шарнира 19, превышающем угловой сектор β ширины консольного упора 21 ведущей верхней втулки 16 на угол К, достаточный для переключения управления передней опорой шасси самолета из режима «взлет-посадка» в режим «руление» и определенный в угловом диапазоне, удовлетворяющем условию (α-β)=2К, где К=(5÷11)°;
Средняя втулка 17 каждой рулевой колонки 4, 5 ниже кольцевого прилива 22 с пазом 23 содержит жестко связанную с ней шестерню 24 внешнего зацепления. Шестерня 24 образует вместе с зубчатой рейкой 25, поводком 26 и валом 27 командного датчика 7 систему преобразования командных поворотов средней втулки 17 каждой рулевой колонки 4, 5 в возвратные угловые перемещения вала 27 командного датчика 7. Средняя втулка 17 снабжена вильчатым рычагом 28 для связи с центрирующим цилиндром 9 командного датчика 7.
Шестерня 24 внешнего зацепления средней втулки 17 каждой рулевой колонки 4, 5 выполнена радиусом Rш.РК и наделена зубчатым венцом 29 с угловой частотой зубьев γз.ш,,РК = Nз.ш.РК/2π, определенной в диапазоне значений γз.ш,,РК = (6,69÷9,55) [ед/рад], где N Nз.ш.РК. - число зубьев в зубчатом венце шестерни средней втулки рулевой колонки.
Командный угол α ш.РК поворота шестерни 24 каждой рулевой колонки 4, 5, равный углу поворота рукоятки 2, 3 рулевого управления, задаваемый пилотом, через связанную с шестерней 24 зубчатую рейку 25, определяет угол αр.в.д. поворота рычага вала 27 командного датчика 9 устройства управления передней опорой шасси, через соотношение радиусов Rш.PK/Rр.в.д. из выражения
αр.в д. = (Rш.РК/Rр.в.д.)⋅αш.РК = (0,47÷0,66)⋅αш.РК [рад], где
Rр.в д. - радиус рычага вала командного датчика устройства управления.
Нижняя втулка 18 установлена и жестко закреплена на своей рулевой колонке 4, 5. Нижняя втулка 18, установленная на ведущей рулевой колонке 4, снабжена жестко закрепленной качалкой 30, выполненной в виде двуплечего рычага первого рода. К одному из плеч 31 двуплечего рычага шарнирно прикреплен концевик тяги 32 системы 10 механической связи рулевых колонок 4, 5. Второе плечо 33 рычага связано с центрирующим цилиндром 8 ведущей рулевой колонки 4. Нижняя втулка 18 ответной ведомой рулевой колонки 5 снабжена качалкой 34 в виде одноплечего рычага для прикрепления концевика тяги 35 системы 10 механической связи рулевых колонок 4, 5. Допустимый угол рабочего поворота и длина указанного одноплечего рычага приняты достаточными для поворота подвижной средней втулки 17 и кинематически связанного с ней командного датчика 7 с возможностью поворота передней опоры шасси на требуемый угол в разрешенном угловом диапазоне поворотов последней в режиме руление.
В режиме «взлет-посадка» консольный упор 21 верхней втулки 16 шарнира 19, неподвижно закрепленной на каждой рулевой колонке 4, 5, расположен в пазу 23 прилива 20 средней втулки 17 в нейтральном положении с образованием двух симметричных угловых зазоров со стенками паза 23, достаточных для педального управления передней опорой шасси самолета в режиме «взлет-посадка», выполняемого в дозволенном для данного режима угловом диапазоне. В режиме «руление» при ручном управлении и выполнении поворотов опоры шасси в полном, соответственно более широком угловом диапазоне, дозволенном для режима «руление», консольный упор 21 ведущей верхней втулки 16 попеременно примкнут к одной из стенок сектора ответного прилива 22 ведомой средней втулки 17 с возможностью передачи через шарнир 19 от верхней втулки 16 к средней втулке 17 командного крутящего момента в режиме «руление».
Разрешенный угловой сектор взаимных поворотов элементов шарнира 19 каждой рулевой колонки 4, 5 передней опоры шасси в режиме «руление» самолета принят не менее ±67° и в (1,35÷1,5) раза превышающем угловой сектор поворотов управляемой передней опоры шасси в указанном режиме наземного движения самолета.
Включатель/выключатель командного блока устройства управления передней опорой шасси самолета выполнен дублированным, установленным на левом и правом штурвалах соответственно первого и второго пилотов с возможностью приведения в действие и/или выключения системы управления передней опорой шасси, производимого с места первого или второго пилота.
Командный блок устройства управления передней опорой шасси самолета работает следующим образом.
Устройство управления передней опорой шасси самолета включается в режим «взлет-посадка» включателем/выключателем, расположенным на штурвалах левого и правого пилотов. Для управления самолетом на земле (взлетно-посадочной полосе) в процессе руления поворачивают одну из рукояток 2, 3 ручного управления. Через систему 10 механической связи рулевых колонок 4, 5 перемещают шток центрирующего цилиндра 8, служащего для возврата рукояток 2, 3 ручного управления в нейтральное положение при снятии с них нагрузки. Вместе с рулевыми колонками 4, 5 поворачивают консольные упоры 21 и выбирают зазор К, необходимый для переключения устройства управления передней опорой шасси самолета с режима «взлет-посадка» на режим «руление» переключателем 6 режимов управления. После выбора зазора К консольный упор 21 поворачивает среднюю втулку 17 вместе с шестерней 24 и начинает перемещать зубчатую рейку 25 командного датчика 7. Зубчатая рейка 25 через поводок 26 приводит во вращение валы 27 командных датчиков 7. Одновременно, при повороте средней втулки 17 каждой рулевой колонки 4, 5 в работу вступают центрирующие цилиндры 9 командных датчиков 7, которые возвращают вал 27 командных датчиков 7 в нейтральное положение после установки рулевых колонок 4, 5 центрирующим цилиндром 8 в нейтральное положение. Электрические сигналы с командных датчиков 7 поступают каждый в свой блок управления (на чертежах не показано) и устройство управления передней опорой шасси самолета начинает работать в режиме «руление». Полный угол поворота рукояток 2, 3 ручного управления обеспечивается ходом центрирующего цилиндра 8. В крайних положениях рукояток 2, 3 ход центрирующего цилиндра 8 выбирается (он становится на упор), но при этом имеют запас хода центрирующие цилиндры 9 командных датчиков 7. При отпускании рукояток 2, 3 ручного управления центрирующий цилиндр 8 через плечо 31 качалки 30 нижней втулки 18 поворачивает через систему 10 механической связи рулевые колонки 4, 5 с консольными упорами 21 и соответственно рукоятки 2, 3 в нейтральное положение. Средняя втулка 17 каждой рулевой колонки 4, 5 освобождается от контакта с консольным упором 21 и под действием центрирующих цилиндров 9 через зубчатую рейку 25, поводок 26 возвращают валы 27 командных датчиков 7 также в нейтральное положение. Командные датчики 7 занимают нейтральное положение и устройство управления передней опорой шасси самолета переключателем 6 режимов управления автоматически переключается в режим «взлет-посадка».
Таким образом, за счет улучшения конструктивных параметров рулевых колонок, снабженных каждая втулками с образованием шарнира двухрежимного управления и подвижно связанных системой дублирования команд, содержащей чередующиеся качалки и жесткие элементы многозвенной тяги, а также разработанной в изобретении системы преобразования командных поворотов колонки в возвратные угловые перемещения вала командного датчика, достигают повышение надежности работы устройства при разноскоростных режимах движения самолета. Геометрические параметры плеч качалок и допустимые углы взаимных поворотов верхней и средней втулок рулевых колонок разработаны с возможностью обеспечения безопасных для каждого из двух режимов движения самолета «руление» и «взлет-посадка» поворотов передней опоры шасси на требуемые углы поворотов с автоматическим взаимным переводом угловых диапазонов, допустимых для каждого из указанных режимов. Повышение компактности устройства достигают за счет более плотной объемной компоновки агрегатов в блоках и системах устройства, достигая тем самым снижение материалоемкости и трудоемкости изготовления устройства.


Изобретение относится к авиационной технике. Командный блок устройства управления передней опорой шасси самолета выполнен двухрежимным и содержит две рулевые колонки с рукоятками ручного управления в режиме «руление» и две независимые от ручного управления системы мест педального управления в режиме «взлет-посадка». Командный блок включает переключатель режимов управления, командные датчики, центрирующие цилиндры и систему механической связи рулевых колонок. Одна рулевая колонка сообщена с переключателем режимов управления. Каждая рулевая колонка содержит три втулки, верхняя и средняя из которых введены в подвижное зацепление с образованием шарнира двухрежимного управления. Верхняя втулка снабжена кольцевым приливом с консольным упором, а средняя втулка снабжена ответным приливом с разомкнутым контуром, образующим паз для консольного упора. Средняя втулка связана системой преобразования командных поворотов втулки рулевой колонки в угловые перемещения вала датчика и снабжена вильчатым рычагом для связи с центрирующим цилиндром датчика. Нижняя втулка каждой рулевой колонки снабжена жестко закрепленной качалкой для прикрепления концевика тяги системы механической связи рулевых колонок. Повышается безопасность. 2 н. и 6 з.п. ф-лы, 5 ил.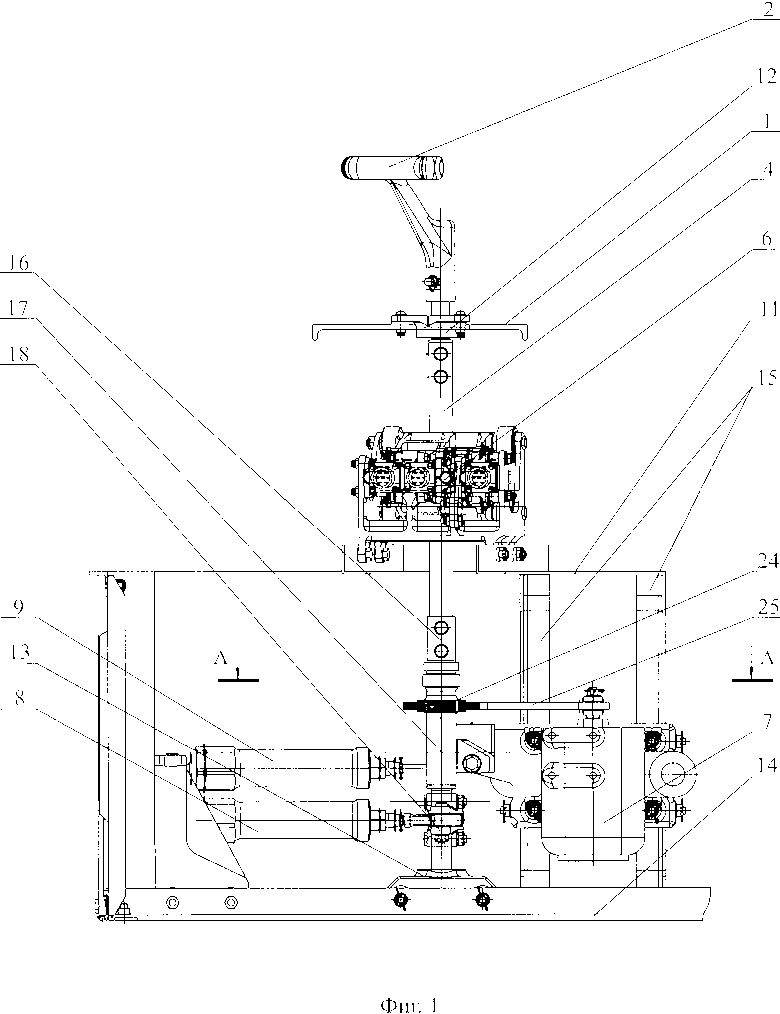
1. Командный блок устройства управления передней опорой шасси самолета, характеризующийся тем, что выполнен двухрежимным с возможностью управления в двух разноскоростных режимах движения самолета «руление» и «взлет-посадка», содержит две выведенные на пульт управления, разнесенные по бортам самолета и установленные каждая на своей рулевой колонке рукоятки ручного управления в режиме «руление», выполненные по числу рулевых колонок системы мест педального управления в режиме «взлет-посадка», независимые от ручного управления, а также не менее чем один переключатель режимов управления, не менее чем один включатель/выключателя командного блока устройства управления, командные датчики по числу рукояток и мест педального управления, центрирующие цилиндры, в том числе по меньшей мере один из них сообщенный с одной рулевой колонкой и по одному на каждый из перечисленных командных датчиков и, кроме того, систему механической связи рулевых колонок для согласованного управления передней опорой шасси самолета, при этом каждая рукоятка прикреплена к рулевой колонке над пультом управления, а рулевая колонка пропущена через пол кабины и с возможностью поворотов подвижно закреплена не менее чем на двух опорах, одна из которых выполнена в верхней зоне пульта управления, а другая размещена в нижней части рулевой колонки, которая прикреплена нижним концом к силовой конструкции фюзеляжа, кроме того, по меньшей мере одна рулевая колонка сообщена с переключателем режимов управления с возможностью передачи управляющих команд последнему, для чего переключатель неподвижно прикреплен к силовой конструкции пола, причем каждая рулевая колонка в нижней половине содержит три втулки, верхняя и средняя из которых введены в подвижное зацепление с образованием шарнира двухрежимного управления, для чего верхняя из указанных втулок снабжена в нижней части кольцевым приливом с консольным упором и жестко зафиксирована на рулевой колонке, а средняя втулка выполнена поворотной и снабжена в верхней части ответным кольцевым приливом с разомкнутым контуром, образующим паз для заведения консольного упора с угловым сектором α паза кольцевого прилива ведомой средней втулки шарнира, превышающим угловой сектор β ширины консольного упора ведущей верхней втулки на угол К, достаточный для переключения управления передней опорой шасси самолета из режима «взлет-посадка» в режим «руление» и определенный в угловом диапазоне, удовлетворяющем условию (α-β)=2К, где К=(5÷11)°, причем средняя втулка ниже прилива с пазом содержит жестко связанную с ней шестерню внешнего зацепления, образующую вместе с зубчатой рейкой, поводком и валом командного датчика систему преобразования командных поворотов втулки рулевой колонки в возвратные угловые перемещения вала упомянутого командного датчика, кроме того, средняя втулка снабжена вильчатым рычагом для связи с центрирующим цилиндром командного датчика, а нижняя втулка установлена и жестко закреплена на каждой из рулевых колонок, при этом по меньшей мере одна из указанных втулок, установленная на ведущей колонке, снабжена жестко закрепленной качалкой, выполненной в виде двуплечего рычага первого рода, к одному из плеч которого шарнирно прикреплен концевик тяги системы механической связи рулевых колонок, а другое плечо связано с центрирующим цилиндром рулевой колонки, при этом нижняя втулка ответной ведомой рулевой колонки снабжена качалкой в виде одноплечего рычага для прикрепления концевика тяги системы механической связи рулевых колонок, причем допустимый угол рабочего поворота и длина указанного рычага приняты достаточными для поворота подвижной средней втулки и кинематически связанного с ней командного датчика с возможностью поворота передней опоры шасси на требуемый угол в разрешенном угловом диапазоне поворотов последней в режиме «руление».
2. Командный блок устройства управления передней опорой шасси самолета по п. 1, отличающийся тем, что в режиме «взлет-посадка» консольный упор верхней втулки шарнира, неподвижно закрепленной на рулевой колонке, расположен в пазу прилива средней втулки в нейтральном положении с образованием двух симметричных угловых зазоров со стенками паза, достаточных для педального управления передней опорой шасси самолета в режиме «взлет-посадка», выполняемого в дозволенном для данного режима угловом диапазоне, а в режиме «руление» при ручном управлении и выполнении поворотов опоры шасси в полном, соответственно более широком угловом диапазоне, дозволенном для режима «руление», упомянутый упор ведущей верхней втулки попеременно примкнут к одной из стенок сектора ответного прилива ведомой средней втулки с возможностью передачи через шарнир от верхней втулки к средней командного крутящего момента в режиме «руление».
3. Командный блок устройства управления передней опорой шасси самолета по п. 1, отличающийся тем, что разрешенный угловой сектор взаимных поворотов элементов шарнира рулевой колонки передней опоры шасси в режиме «руление» самолета принят не менее ±67° и в (1,35÷1,5) раза превышающим угловой сектор поворотов управляемой передней опоры шасси в указанном режиме наземного движения самолета.
4. Командный блок устройства управления передней опорой шасси самолета по п. 1, отличающийся тем, что включатель/выключатель командного блока устройства управления передней опорой шасси самолета выполнен дублированным, установленным на штурвалах с возможностью приведения в действие и/или выключения системы управления передней опорой шасси, производимого с места первого или второго пилота.
5. Командный блок устройства управления передней опорой шасси самолета, характеризующийся тем, что выполнен двухрежимным с возможностью управления в двух разноскоростных режимах движения самолета «руление» и «взлет-посадка», содержит две выведенные на пульт управления, разнесенные по бортам самолета и установленные каждая на своей рулевой колонке рукоятки ручного управления в режиме «руление», выполненные по числу рулевых колонок системы мест педального управления в режиме «взлет-посадка», независимые от ручного управления, а также не менее чем один переключатель режимов управления, не менее чем один включатель/выключатель устройства управления, командные датчики по числу рукояток и мест педального управления, центрирующие цилиндры, в том числе по меньшей мере один из них сообщенный с одной рулевой колонкой устройства управления и по одному на каждый из перечисленных командных датчиков и, кроме того, систему механической связи рулевых колонок для согласованного управления передней опорой шасси самолета, при этом каждая рулевая колонка в нижней половине содержит три втулки, верхняя и средняя из которых введены в подвижное зацепление с образованием шарнира двухрежимного управления, для чего верхняя из указанных втулок снабжена в нижней части кольцевым приливом с консольным упором и жестко зафиксирована на рулевой колонке, а средняя втулка выполнена поворотной и снабжена в верхней части ответным кольцевым приливом с разомкнутым контуром, образующим паз для заведения консольного упора с угловым сектором α паза кольцевого прилива ведомой средней втулки шарнира, превышающим угловой сектор β ширины консольного упора ведущей верхней втулки на угол К, достаточный для переключения управления передней опорой шасси самолета из режима «взлет-посадка» в режим «руление», причем указанная средняя втулка ниже прилива с пазом содержит жестко связанную с ней шестерню внешнего зацепления, образующую вместе с зубчатой рейкой, поводком и валом командного датчика систему преобразования командных поворотов втулки рулевой колонки в возвратные угловые перемещения вала упомянутого командного датчика, при этом шестерня внешнего зацепления средней втулки каждой рулевой колонки выполнена радиусом Rш.РК и наделена зубчатым венцом с угловой частотой зубьев γз.ш.РК, определенной в диапазоне значений γз.ш.РК=(6,69÷9,55) [ед./рад], при этом командный угол αш.РК поворота шестерни каждой рулевой колонки, равный углу поворота рукоятки рулевого управления, задаваемый пилотом, через связанную с шестерней зубчатую рейку, определяет угол αр.в.д. поворота рычага вала командного датчика устройства управления передней опорой шасси, через соотношение радиусов Rш.РК/Rр.в.д. из выражения
αр.в.д.=(Rш.РК/Rр.в.д.)⋅αш.РК=(0,47÷0,66)⋅αш.РК [рад],
где Rр.в.д. - радиус рычага вала командного датчика устройства управления; кроме того, средняя поворотная втулка каждой рулевой колонки снабжена вильчатым рычагом для связи с центрирующим цилиндром командного датчика, а нижняя втулка установлена и жестко закреплена на каждой из рулевых колонок.
6. Командный блок устройства управления передней опорой шасси самолета по п. 5, отличающийся тем, что каждая рукоятка прикреплена к рулевой колонке над пультом управления, а рулевая колонка пропущена через пол кабины и с возможностью поворотов подвижно закреплена не менее чем на двух опорах, одна из которых выполнена в верхней зоне пульта управления, а другая размещена в нижней части рулевой колонки, которая прикреплена нижним концом к силовой конструкции фюзеляжа, причем по меньшей мере одна рулевая колонка сообщена с переключателем режимов управления с возможностью передачи управляющих команд последнему, для чего переключатель неподвижно прикреплен к силовой конструкции пола, кроме того, по меньшей мере нижняя втулка, установленная на ведущей рулевой колонке, снабжена жестко закрепленной качалкой, выполненной в виде двуплечего рычага первого рода, к одному из плеч которого шарнирно прикреплен концевик тяги системы механической связи рулевых колонок, а другое плечо связано с центрирующим цилиндром рулевой колонки, а нижняя втулка ответной ведомой рулевой колонки снабжена качалкой в виде одноплечего рычага для прикрепления концевика тяги системы механической связи рулевых колонок, причем допустимый угол рабочего поворота и длина указанного рычага приняты достаточными для поворота подвижной средней втулки и кинематически связанного с ней командного датчика с возможностью поворота передней опоры шасси на требуемый угол в разрешенном угловом диапазоне поворотов последней в режиме «руление».
7. Командный блок устройства управления передней опорой шасси самолета по п. 5, отличающийся тем, что в режиме «взлет-посадка» консольный упор верхней втулки шарнира, неподвижно закрепленной на рулевой колонке, расположен в пазу прилива средней втулки в нейтральном положении с образованием двух симметричных угловых зазоров со стенками паза, достаточных для педального управления передней опорой шасси самолета в режиме «взлет-посадка», выполняемого в дозволенном для данного режима угловом диапазоне, а в режиме «руление» при ручном управлении и выполнении поворотов опоры шасси в полном, соответственно более широком угловом диапазоне, дозволенном для режима «руление», упомянутый упор ведущей верхней втулки попеременно примкнут к одной из стенок сектора ответного прилива ведомой средней втулки с возможностью передачи через шарнир от верхней втулки к средней командного крутящего момента в режиме «руление», а угловой сектор α паза кольцевого прилива ведомой средней втулки шарнира выполнен достаточным для переключения управления передней опорой шасси самолета из режима «взлет-посадка» в режим «руление» и определен в угловом диапазоне, удовлетворяющем условию (α-β)=2К, где К=(5÷11)°, β - угловой сектор ширины консольного упора ведущей верхней втулки шарнира, при этом разрешенный угловой сектор взаимных поворотов элементов шарнира рулевой колонки передней опоры шасси в режиме «руление» самолета принят не менее ±67° и в (1,35÷1,5) раза превышающим угловой сектор поворотов управляемой передней опоры шасси в указанном режиме наземного движения самолета.
8. Командный блок устройства управления передней опорой шасси самолета по п. 5, отличающийся тем, что включатель/выключатель командного блока устройства управления передней опорой шасси самолета выполнен дублированным, установленным на штурвалах с возможностью приведения в действие и/или выключения системы управления передней опорой шасси, производимого с места первого или второго пилота.
| УСТРОЙСТВО УПРАВЛЕНИЯ ПЕРЕДНЕЙ ОПОРОЙ ШАССИ САМОЛЕТА | 2009 |
|
RU2395428C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПЕРЕДНЕЙ ОПОРОЙ ШАССИ САМОЛЕТА | 1992 |
|
RU2070140C1 |
| УСТРОЙСТВО АДИАБАТИЧЕСКОГО СЖАТИЯ (ВАРИАНТЫ) | 2013 |
|
RU2536500C2 |
| US 4948069 A, 14.08.1990. | |||

