Устройство управления автомобилем предназначено для обеспечения управляемости автомобиля. Основной способ поворота колесных машин - поворот управляемых колес в горизонтальной плоскости. Обычно в качестве управляемых используют передние колеса. Известно, что чем меньше радиус поворота, больше предельная скорость изменения кривизны траекторий характерных точек и меньше энергии затрачивается на управление, тем лучше управляемость и поворачиваемость колесной машины. Поэтому автомобили военного назначения имеют управляемые передние и задние колеса (ЗИЛ-130ЛМ, колесные шасси 5921, 5922). Для этого на машинах установлены распределители управления поворотом и гидроцилиндры передних и задних колес.
Известны системы управления модели 4WS фирм Nissan (Skyline), Hondo. (Prelude), Mazda (626), Mitsubishi (Galant и Sigma) и Toyota (Celled). Наиболее простую по устройству систему 4WS предложила Hondo (сайт Интернета www.autosazeta.corn). В ней кинематическая связь между передней и задней рулевыми рейками осуществлялась механическим способом. Перемещением рулевых тяг задних колес заведовал эксцентрик согласующего механизма, заставлявший колеса поворачиваться сначала в одну, а затем - по мере увеличения угла поворота руля - в другую сторону. Система Hondo была не только простой, но и недорогой, весила всего 150 Н, однако ее эффективность и точность в работе этой системы далеки от идеала.
Из известных наиболее близкой по технической сущности является система рулевого управления боевой бронированной колесной машины с установкой на машине продольной тяги, соединяющей передние и задние управляемые колеса (или пары колес) и состоящей из двух частей, соединяемых между собой через коромысло, имеющее прорезь, радиус которой равен длине задней части продольной тяги, при этом ось коромысла неподвижно закреплена на корпусе машины (патент №2198812, опубл. 20.02.2003 г.). Однако она обладает недостатком - отсутствием или нехваткой реактивного усилия на руле. В этом чаще всего "виноват" гидроусилитель - он слишком активно помогает водителю, убирая ту часть возвращающего усилия, которая и обеспечивает "чувство автомобиля".
Предлагаемое изобретение направлено на расширение функциональных свойств устройства путем введения возможности изменения кинематической связи для передних и задних колес.
Это достигается тем, что в устройстве управления автомобилем, содержащем сошку, продольную рулевую тягу, рычаг, поворотный кулак, два одинаковых рычага и поперечную рулевую тягу, связывающую между собой оба колеса, согласно предлагаемому изобретению в качестве рулевого колеса применен блок управления с джойстиком, соединенный с усилителем электрического сигнала, связанного с синхронизатором, соединенный с исполнительными двигателями, на которых закреплены шестерни, связанные с передней и задней зубчатыми рейками привода поворота передних и задних колес автомобиля, а также соленоидами газа и тормоза.
В системе управления используют электрические исполнительные элементы - джойстик, соединенный с усилителем электрического сигнала и синхронизатором и управляющий исполнительными двигателями рулевого управления передних и задних колес. Он же приводит в действие электрическое управление подачи газа и тормозных устройств.
Введение предлагаемого типа управления обеспечивает следующие преимущества:
- независимость работы усилителя от оборотов двигателя автомобиля;
- информативность (самонастройка усилителя руля на скорость автомобиля);
- независимость работы усилителя руля от температурных перепадов;
- экономичность: усилитель руля потребляет энергию только при вращении руля, в отличие от гидроусилителя, при котором рабочая жидкость всегда циркулирует по трубам, на что тратится дополнительная энергия;
- коэффициент полезного действия электродвигателя превышает КПД гидронасоса;
- повышенная вероятность безотказной работы за счет исключения конструкции шлангов, ремней, прокладок, сальников, жидкостей;
- повышенная симметричность руля (отсутствие разницы вращающего усилия при левом и правом поворотах руля).
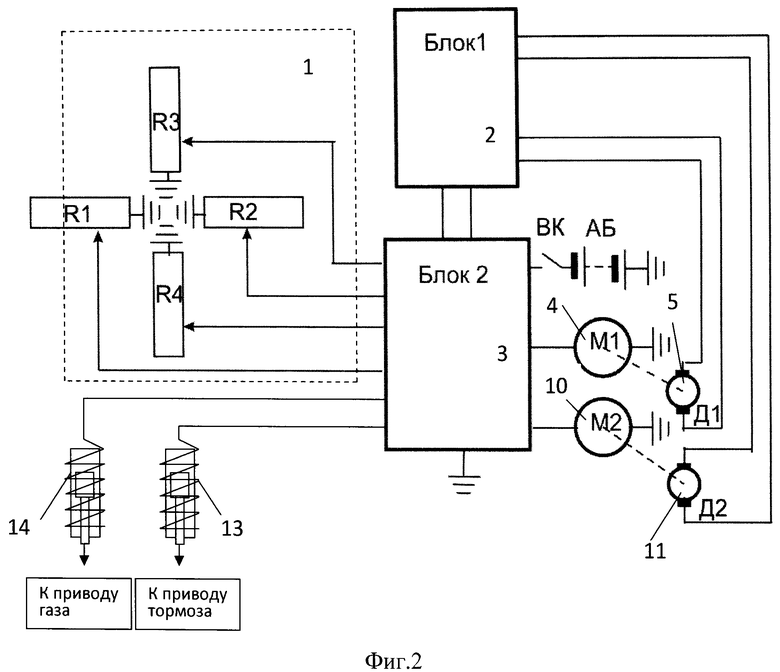
На фиг.1 изображена схема управления автомобилем, а на фиг.2 - функциональная схема управления.
Устройство управления автомобилем содержит:
1 - блок управления с джойстиком;
2 - усилитель электрического сигнала;
3 - синхронизатор угла поворота двигателей;
4 - исполнительный двигатель M1;
5 - датчик угла поворота;
6 - передняя зубчатая рейка поворотного механизма передних колес;
7 - передние колеса автомобиля;
8 - задние колеса автомобиля;
9 - задняя зубчатая рейка поворотного механизма задних колес;
10 - исполнительный двигатель М2;
11 - датчик угла поворота;
12 - зубчатая шестерня;
13 - соленоид томоза;
14 - соленоид газа.
Работает устройство управления автомобилем следующим образом.
При повороте, развороте, парковке ручка джойстика отклоняется влево или вправо (в зависимости от направления поворота). Электрический сигнал с джойстика усиливается и подается на исполнительные двигатели. Двигатели через шестерню перемещают рейку и поворачивают в цапфах колеса. Колеса могут поворачиваться в разные стороны, обеспечивая поворот с малым радиусом, либо в одну сторону, обеспечивая параллельное движение поперек дороги (при точной парковке). Датчики вращения на валу двигателей снимают сигнал рассогласования углов между колесами, который подается в синхронизатор (фиг.2), тем самым обеспечивая одинаковые углы поворота колес. Синхронизатор представляет собой следящий привод, контролирующий сигнал рассогласования угла поворота переднего и заднего рулевых приводов. Он включает датчики углов поворота 5,11, блока синхронизатора 2.
Для увеличения подачи топливно-воздушной смеси ручка джойстика отклоняется вперед - сигнал с джойстика поступает на усилитель. Усиленный сигнал подается на соленоид, который обеспечивает движение привода дроссельной заслонки, соответственно увеличивая или уменьшая количество подаваемого топлива в двигатель.
Торможение производится путем нажатия кнопки на ручке джойстика через переменный резистор. При этом скорость торможения пропорционально зависит от скорости нажатия. Электрический сигнал с джойстика поступает на усилитель. С него напряжение прикладывается к соленоиду тормоза, обеспечивая движение привода тормоза колес.
Применение систем управления всеми четырьмя колесами преследует три цели. Первая - получить переменную чувствительность автомобиля к повороту руля. При езде по городским улицам - лучше иметь более чувствительное рулевое управление, чтобы не вращать рулевое колесо при каждом маневре. А на автостраде "острый" руль может вызвать проблемы - машина будет слишком резко реагировать даже на небольшие подруливания. Вторая цель - улучшить маневренность автомобиля при парковке или развороте в стесненных городских условиях. Третья - повысить курсовую устойчивость при резких маневрах на высокой скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Боевой ударный радиоуправляемый комплекс | 2021 |
|
RU2757095C1 |
| Боевой ударный радиоуправляемый комплекс | 2021 |
|
RU2767103C1 |
| ГУСЕНИЧНЫЙ ТРАКТОР | 2008 |
|
RU2385249C1 |
| БОЕВОЙ РОБОТИЗИРОВАННЫЙ МОБИЛЬНЫЙ КОМПЛЕКС | 2015 |
|
RU2584766C1 |
| УПРАВЛЕНИЕ ПРЕИМУЩЕСТВЕННО РУЛЕВОГО ТИПА | 2004 |
|
RU2278796C2 |
| АВТОМОБИЛЬНОЕ ПАРКОВОЧНОЕ УСТРОЙСТВО | 2012 |
|
RU2489282C2 |
| ГИДРАВЛИЧЕСКИЙ ТОРМОЗ ОТКАТА АРТИЛЛЕРИЙСКОГО ОРУДИЯ | 2016 |
|
RU2611853C1 |
| Рулевое управление транспортного средства со всеми управляемыми колесами | 1987 |
|
SU1497091A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2587317C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ПРЕОДОЛЕНИЯ ИМ ЛЕСТНИЧНЫХ МАРШЕЙ (ВАРИАНТЫ) | 2000 |
|
RU2200526C2 |
Изобретение относится к области транспортного машиностроения. Устройство управления автомобилем содержит приводную шестерню, рейку, продольные рулевые тяги, жестко закрепленные к рейке, рычаги, поворотные кулаки, с установленными на них колесами. Устройство управления автомобилем содержит блок управления с джойстиком, соединенный с усилителем электрического сигнала. Сигнал передается на три исполнительных устройства: на исполнительные двигатели, на соленоид газа и соленоид тормоза. На валу исполнительных двигателей закреплены шестерни, связанные с передней и задней зубчатыми рейками привода поворота передних и задних колес автомобиля. На валу исполнительных двигателей установлены датчики угла поворота, связанные обратной связью с синхронизатором, обеспечивающим согласование угла поворота колес с заданным углом отклонения рукоятки джойстика. Соленоид газа связан с рычагом дроссельной заслонки карбюратора. Достигается улучшение управляемости автомобилем. 2 ил.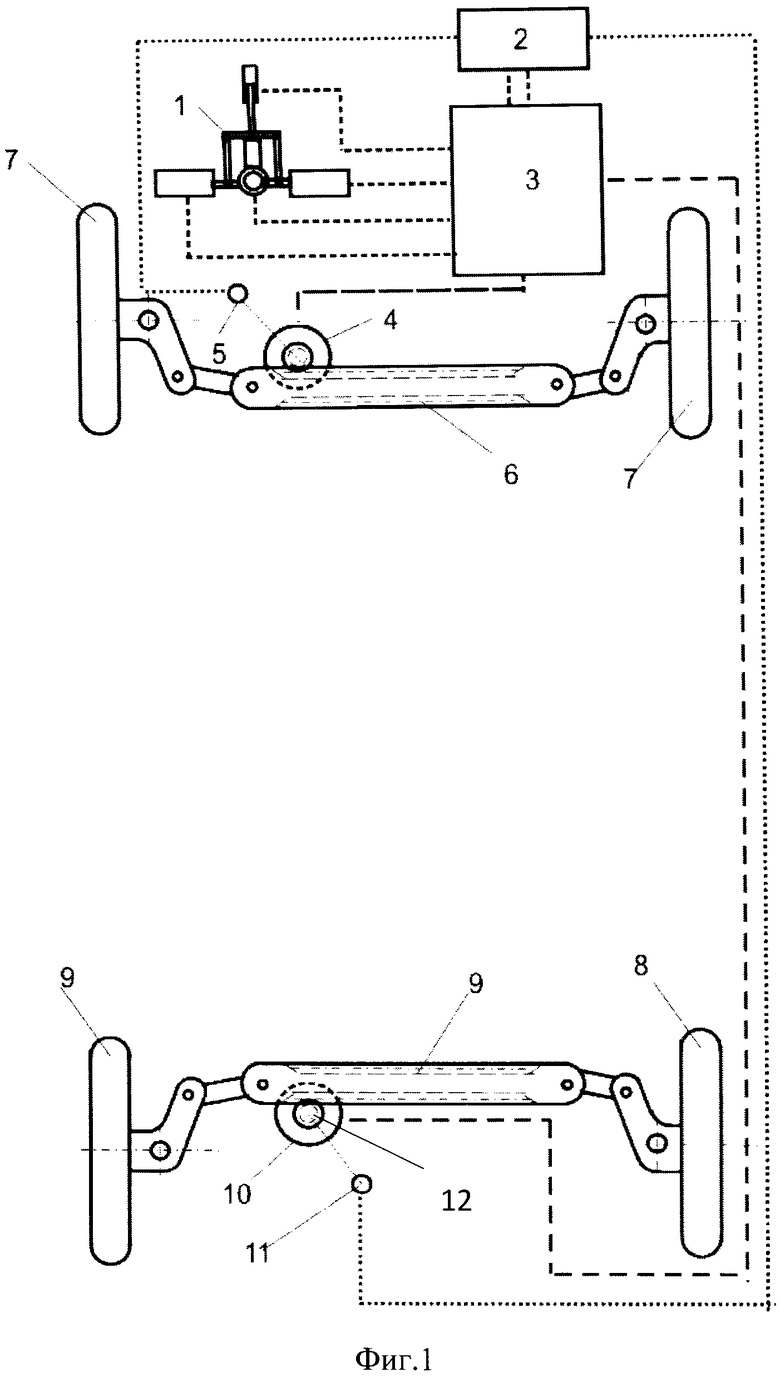
Устройство управления автомобилем, содержащее приводную шестерню, рейку, продольные рулевые тяги, жестко закрепленные к рейке, рычаги, поворотные кулаки с установленными на них колесами, отличающееся тем, что используется блок управления с джойстиком, соединенный с усилителем электрического сигнала, передаваемого на три исполнительных устройства: первое - на исполнительные двигатели, на валу которых закреплены шестерни, связанные с передней и задней зубчатыми рейками привода поворота передних и задних колес автомобиля, на валу исполнительных двигателей установлены датчики угла поворота, связанные обратной связью с синхронизатором, обеспечивающим согласование угла поворота колес с заданным углом отклонения рукоятки джойстика, второе - на соленоид газа, связанный с рычагом дроссельной заслонки карбюратора, третье - на соленоид тормоза.
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РУЛЕВЫМ МЕХАНИЗМОМ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2092359C1 |
| EP 1157915 A2, 28.11.2001 | |||
| US 2012046835 A1, 23.02.2012 | |||
| JP 2002160659 A, 04.06.2002 | |||

