Изобретение относится к измерительной технике и может быть использовано в устройствах, технического зрения, предназначенных для определения расстояния от перемещающегося объекта до неподвижных объектов.
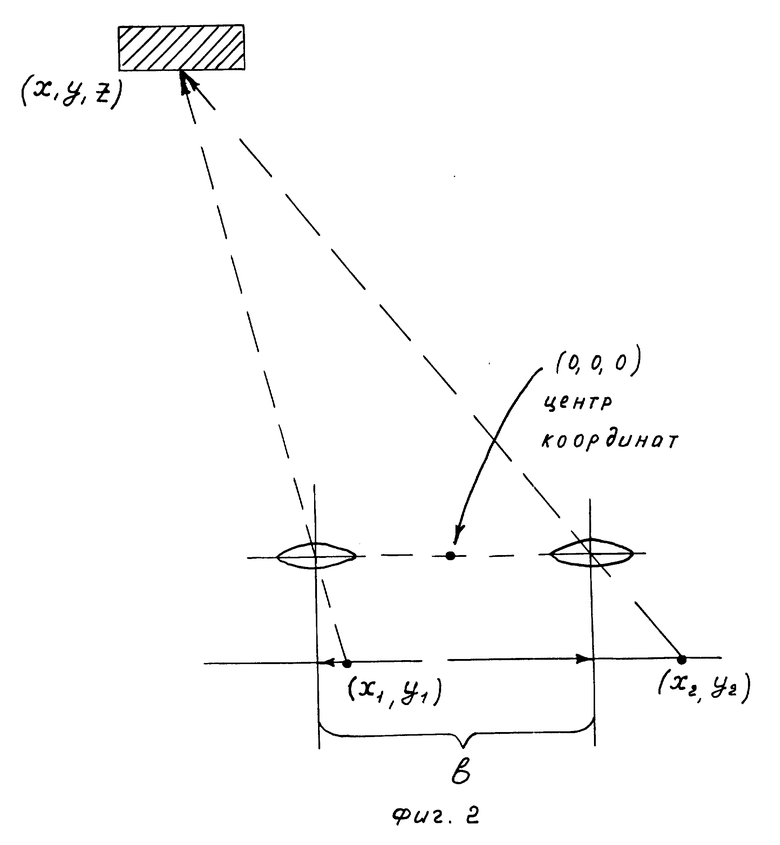
Известен способ определения расстояния до наблюдаемого объекта при помощи двух оптических приборов [1] при реализации которого два оптических прибора располагаются таким образом, что их оптические оси параллельны и отстоят друг от друга на расстояние b, при этом для каждого оптического прибора определяют координаты проекции наблюдаемого объекта в координатной плоскости этого оптического прибора, а расстояние до объекта D определяется согласно выражению [см. фиг.2]
где D расстояние до наблюдаемого объекта относительно центра отрезка, содержащего центры объективов оптических приборов;
(x, y, z) координаты наблюдаемого объекта в системе координат с центром в середине прямой, соединяющей центры объективов оптических приборов;
(x1, y1) координаты проекции наблюдаемого объекта в картинной плоскости первого оптического прибора;
(x2, y2) координаты проекции наблюдаемого объекта в картинной плоскости оптического прибора;
b расстояние между оптическими осями приборов;
f фокусное расстояние оптических приборов.
Данный способ позволяет определить расстояние до наблюдаемого объекта при помощи двух оптических приборов.
Недостатком способа является высокий уровень требуемых затрат. Необходимость иметь два оптических прибора увеличивает в два раза стоимость, вес, объем системы. Кроме того, оптические приборы должны быть разнесены на достаточно большое расстояние, что может привести к существенному увеличению габаритов системы технического зрения в целом и ограничить применение данного способа для измерения расстояния в малогабаритных системах технического зрения.
Поэтому особый практический интерес при создании малогабаритных систем технического зрении представляют способы, позволяющие определять расстояние до наблюдаемых объектов при помощи одного оптического прибора.
Определить расстояние до объекта при помощи одного оптического прибора возможно в том случае, когда предварительно известны реальные линейные размеры наблюдаемого объекта.
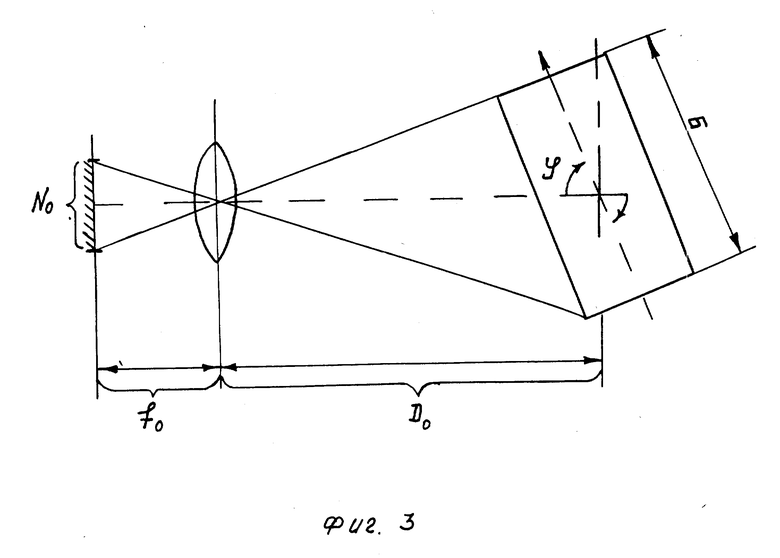
Наиболее близким к предлагаемому является способ определения расстояния до объекта при помощи оптического прибора [2] при котором измеряют размер изображения объекта в плоскости изображения оптического прибора, определяют фокусное расстояние оптического прибора, оценивают реальные линейные размеры наблюдаемого объекта, для чего осуществляют классификацию наблюдаемого объекта (определяют к какому из известных классов с известными линейными размерами принадлежит наблюдаемый объект) и оценивают ракурс (курсовой угол) наблюдаемого объекта относительно линии визирования оптического прибора, а расстояние до наблюдаемого объекта определяют согласно формуле [см. фиг. 3]
D0 (f0•Б•cosY)/N0
где D0 расстояние до наблюдаемого объекта;
f0 фокусное расстояние оптического прибора;
Y ракурс (курсовой угол) наблюдаемого объекта относительно линии визирования оптического прибора;
N0 линейные размеры проекции наблюдаемого объекта в картинной плоскости оптического прибора;
Б линейные размеры (база) наблюдаемого объекта.
Данный способ позволяет с помощью одного оптического прибора определить расстояние до объекта, линейные размеры которого априори известны.
При этом измеряя линейные размеры изображения наблюдаемого объекта в плоскости изображения оптического прибора, определяют угловые размеры наблюдаемого объекта. Затем оцениваются линейные размеры наблюдаемого объекта (его базу), для чего сначала определяют, к какому из известных классов принадлежит наблюдаемый объект (предполагается, что все возможные классы известны и для объектов каждого класса известны их базовые размеры) и оценивают ориентацию (ракурс) наблюдаемого объекта на местности относительно линии визирования оптического прибора. Затем, зная линейные размеры объекта и его угловые размеры, определяют расстояние до объекта.
Недостаток данного способа ограниченные функциональные возможности, так как данный способ не позволяет определять расстояние до объектов, линейные размеры которых не известны. Этот недостаток существенно сужает область применения данного способа определения расстояния до объектов при помощи оптического прибора в малогабаритных системах технического зрения.
Кроме того, целесообразно отметить также следующее. Задача классификации (определение типа объекта) и оценки ракурса объекта практически во всех существующих системах технического зрения общего назначения решается человеком оператором. Это в свою очередь существенно затрудняет построение полностью автоматизированных систем технического зрения.
Ошибки классификации объектов и погрешности при оценке их ракурса, особенно при неблагоприятных условиях наблюдения, существенно снижают точность определения расстояния до наблюдаемого объекта.
Существенным недостатком является также необходимость ввода линейных размер наблюдаемого объекта (или его типа) и оценки ракурса человеком-оператором в интерактивном режиме, необходимость ввода этих значений отвлекает оператора от решения других задач по управлению системой, что весьма существенно в условиях дефицита времени для принятия решений.
Поэтому особую актуальность приобретает задача определения при помощи одного оптического прибора расстояния до объекта, линейные размеры которого могут быть неизвестны.
Во многих практических применениях есть возможность перемещать оптический прибор по направлению к наблюдаемому объекту (или от него). Анализ показал, что зная абсолютную величину, на которую осуществилось перемещение, и изменение линейных размеров изображения объекта в плоскости изображения оптического прибора, можно определить расстояние до объекта, реальные линейные размеры которого неизвестны.
Целью изобретения является расширение функциональных возможностей способа за счет измерения расстояния до неподвижных объектов, линейные размеры которых неизвестны.
Поставленная цель достигается тем, что в способе определения расстояния до объекта при помощи оптического прибора, при котором измеряют размер изображения объекта в плоскости изображения оптического прибора, дополнительно осуществляют перемещение оптического прибора вдоль его линии визирования по направлению к объекту или от него на фиксированное расстояние, вновь измеряют размер изображении объекта и определяют расстояние Dt до объекта по формуле
где N0 размер изображения объекта до перемещения;
N(t) размер изображения объекта после перемещения;
S(t) расстояние, на которое переместился оптический прибор.
Для изложения сути предлагаемого способа целесообразно учесть следующее.
Рассмотрим взаимное расположение оптического прибора и наблюдаемого объекта в момент времени t0 (см. фиг.1а). Предположим, что в момент времени t0 расстояние до объекта равно D0, а размер изображения объекта в плоскости изображения оптического прибора равен N0, фокусное расстояние оптического прибора равно f0, а реальный линейный размер наблюдаемого объекта D. Из подобных треугольников A B C и C E F имеем
Переместим за время t оптический прибор по направлению к наблюдаемому объекту (вдоль линии визирования) на расстояние S1(t). Тогда в момент времени t расстояние от оптического прибора до объекта равно D(t) D0 S(t), причем обозначим N (t) размер изображения объекта в плоскости изображения оптического прибора и f(t) фокусное расстояние оптического прибора. Из треугольников A1B1C1 и C1E1F1 следует
разделив (1) на (2) получим тогда
тогда
Разделив числитель и знаменатель дроби в правой части на F0, получим
Здесь необходимо отметить, что для подавляющего большинства практических приложений предлагаемого способа измерения дальности проводятся для удаленных объектов, то есть при этом f0 f (t) с большой степенью точности. Тогда  и выражение (6) упрощается
и выражение (6) упрощается
При определении расстояния до объекта при помощи предлагаемого способа отпадает необходимость знать реальные линейные размеры этого объекта. Это имеет важное практическое значение, т.к. реально линейные размеры наблюдаемых объектов очень часто неизвестны (например, объект невозможно классифицировать), а если и возможно каким-либо образом их оценить, то с очень низкой точностью (например, из-за отсутствия возможности точно определить угловой ракурс объекта относительно линии визирования оптического прибора).
Важным обстоятельством является также то, что отпадает необходимость ввода человеком-оператором в интерактивном режиме размеров наблюдаемого объекта и его ракурса, при этом оператор не отвлекается от решения других задач по управлению системой.
Существенно также то, что применение предлагаемого способа позволяет реализовать автоматизированную систему технического зрения, одной из операций которой является измерение расстояния до объекта при помощи одного оптического прибора.
Сравнение предлагаемого способа с прототипом показывает, что предлагаемый способ отличается наличием новых операций: перемещение оптического прибора вдоль его оптической оси, повторное измерение линейных размеров изображения объекта в плоскости изображения оптического прибора, а также последовательность операций относительно друг друга и других операций. Применение этих операций в указанной последовательности позволяет определить расстояние до неподвижных объектов, размеры которых неизвестны. Анализ известных решений показывает, что применение вышеперечисленных операций в указанной последовательности для определения при помощи оптического прибора расстояние до неподвижных объектов не известно. На основании этого можно заключить, что изобретение не известно из уровня техники и удовлетворяет критерию "новизна". Кроме того, анализ известных решений показывает, что предлагаемое техническое решение не следует явным образом из уровня измерительной техники, т.е. оно имеет необходимый изобретательский уровень.
На фиг.1a,b представлено взаимное расположение оптического прибора и наблюдаемого объекта в момент t0 и t; на фиг. 2 способ измерения расстояния до объекта при помощи двух оптических приборов; на фиг. 3 способ измерения расстояния до объекта с известными линейными размерами при помощи одного оптического прибора; на фиг.4 пример реализации предлагаемого способа для железнодорожного транспорта.
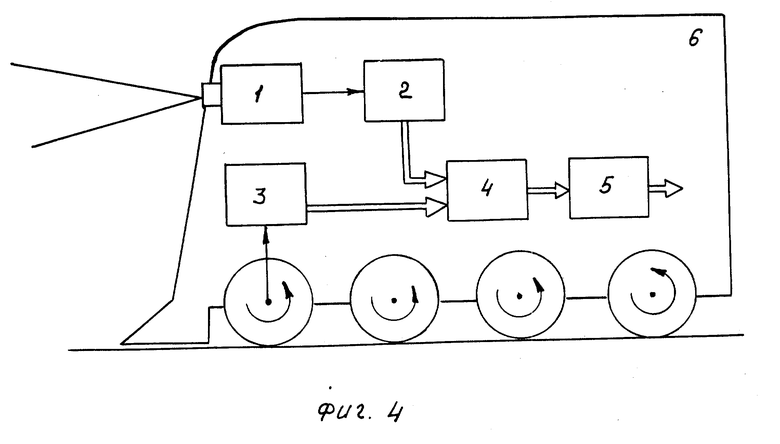
Рассмотрим пример, подтверждающий возможность технической реализации предлагаемого способа измерения расстояния до объекта при помощи оптического прибора. На фиг. 4 представлено устройство управления экстренным торможением железнодорожного транспорта, реализующее предлагаемый способ определения расстояния до объекта при помощи оптического прибора.
Устройство содержит телевизионный датчик (телекамеру) 1, блок 2 формирования контурного изображения, счетчик 3 пройденного пути (спидометр), блок 4 памяти и микроЭВМ, установленные на железнодорожном локомотиве 6.
Устройство осуществляет автоматическое измерение расстояния до объектов, находящихся на рельсах по ходу движения поезда. Телевизионный датчик 1 жестко закреплен впереди локомотива 6 таким образом, что в его поле зрения попадают объекты, возникающие на рельсах по ходу поезда. В качестве телевизионного датчика 1 может быть использована любая бытовая или полупрофессиональная телекамера. Таким образом, в каждый текущий момент времени (например, за каждый телевизионный кадр) на выходе телевизионного датчика 1 будет формироваться изображение, несущее информацию об объектах, находящихся по ходу движения локомотива. Телевизионный сигнал с выхода телевизионного датчика 1 поступает на вход блока 2 формирования контурного изображения. В блоке 2 осуществляется выделение на изображении границ между объектами и фоном, формируется контурное изображение. Контурное изображение формируется путем пространственного дифференцирования видеосигнала и сравнения результата дифференцирования с порогом. Такой подход позволяет выделить граничные точки на изображении, т.е. точки, которые принадлежат границе между объектом и фоном. Устройства, предназначенные для выделения контуров объектов на телевизионном изображении и работающие в реальном масштабе времени широко известны.
Контурный рисунок с выхода блока 2 поступает на вход блока памяти 4 и записывается в него. Затем в блок памяти 4 поступает информация о длине пройденного пути с выхода счетчика 3. Счетчик является счетчиком количества оборотов колеса локомотива и позволяет оценить величину пройденного локомотивом пути. Контурное изображение из блока 4 памяти считывается в микро ЭВМ (например, "Электроника-85"), в которой осуществляется анализ контурного изображения и измерение линейных размеров контурного рисунка объекта, находящегося в центре изображения. Затем через интервал времени Δt (кратный длительности телевизионного кадра) текущее телевизионное изображение с выхода телевизионного датчика 1 при помощи блока 2 преобразуется в контурный рисунок и записывается в блок 4 памяти. Затем туда же записываются показания о пройденном пути с выхода счетчика 3. Контурный рисунок с выхода блока памяти 4 считывается в микроЭВМ 5, которая осуществляет анализ изображениях и измерение линейных размеров контурного изображения наблюдаемого объекта.
Затем на основании формулы (6) осуществляется вычисление расстояние до объекта в текущий момент времени.
Блоки памяти, ориентированные на запоминание одного или нескольких кадров изображения и обмен информацией с микроЭВМ, известны.
Прелагаемое устройство позволяет в автоматическом режиме измерять расстояние до объекта, находящегося впереди по направлению локомотива. В случае, если это расстояние близко к критическому, микроЭВМ посылает запрос оператору-машинисту (например, включает звуковой сигнал). Если после этого через некоторый интервал времени от машиниста не поступил ответный сигнал (подтверждение приема), микроЭВМ включает систему экстренного торможения.
Выражение (7) описывает способ определения расстояния до неподвижного объекта при помощи одного оптического прибора на основании анализа размеров изображения объекта в плоскости изображения оптического прибора в моменты времени t0 и t.
При определении расстояния до объекта при помощи предложенного способа отпадает необходимость знать реальные линейные размеры и ориентацию объекта на наблюдаемой сцене. Это позволяет определять расстояние до объектов, линейные размеры которых оператору неизвестны.
Возможность определить расстояние до неподвижных объектов, реальные линейные размеры которых неизвестны, позволяет расширить функциональные возможности способа. Кроме того, такая возможность позволяет существенно расширить область применения предлагаемого способа измерения расстояния в различного рода универсальных системах технического зрения.
Технико-экономический эффект от использования изобретения определяется предотвращением наездов и столкновений на железнодорожном и водном транспорте, количество которых в настоящее время достаточно велико.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ДО ОБЪЕКТОВ ПО ИХ ИЗОБРАЖЕНИЯМ ПРЕИМУЩЕСТВЕННО В КОСМОСЕ | 2014 |
|
RU2568335C1 |
| ТЕЛЕВИЗИОННЫЙ МНОГОРАКУРСНЫЙ СПОСОБ ПОЛУЧЕНИЯ, ПЕРЕДАЧИ И ПРИЕМА СТЕРЕОИНФОРМАЦИИ О НАБЛЮДАЕМОМ ПРОСТРАНСТВЕ С ЕГО АВТОМАТИЧЕСКИМ ИЗМЕРЕНИЕМ. СИСТЕМА "ТРЕТИЙ ГЛАЗ" | 2013 |
|
RU2543549C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННОГО РАССТОЯНИЯ МЕЖДУ МАЛОРАЗМЕРНЫМИ ОБЪЕКТАМИ | 2019 |
|
RU2734070C1 |
| Способ измерения дальности от маневрового тепловоза до вагона на прямолинейном участке железнодорожного пути | 2020 |
|
RU2750364C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ГРАНИЦ ОБЪЕКТА | 2017 |
|
RU2656130C1 |
| МОНОСТАТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ НИЖНЕЙ ГРАНИЦЫ ОБЛАЧНОСТИ | 2008 |
|
RU2377612C1 |
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2004 |
|
RU2276647C1 |
| Способ измерения дальности до вагона на прямолинейном участке железнодорожного пути | 2021 |
|
RU2769453C1 |
| Способ косвенного измерения дальности от маневрового тепловоза до вагона на прямолинейном участке железнодорожного пути | 2019 |
|
RU2729512C1 |
| УСТРОЙСТВО ДЛЯ СГЛАЖИВАНИЯ ИМПУЛЬСНОЙ ПОМЕХИ | 1991 |
|
RU2024056C1 |
Использование: в устройствах систем технического зрения, предназначенных для определения расстояния до объектов. Сущность изобретения: в способе, включающем измерение размера изобретения объекта в плоскости изображения оптического прибора, дополнительно осуществляют перемещение оптического прибора по направлению к объекту (или от него) вдоль линии визирования оптического прибора на фиксированное расстояние и вновь измеряют размеры изображения наблюдаемого объекта, после чего расстояние до объекта определяют согласно формуле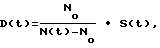
где N0 - размер изображения объекта до перемещения; N (t) - размер изображения объекта после перемещения; S (t) - расстояние, на которое переместился оптический прибор. 4 ил.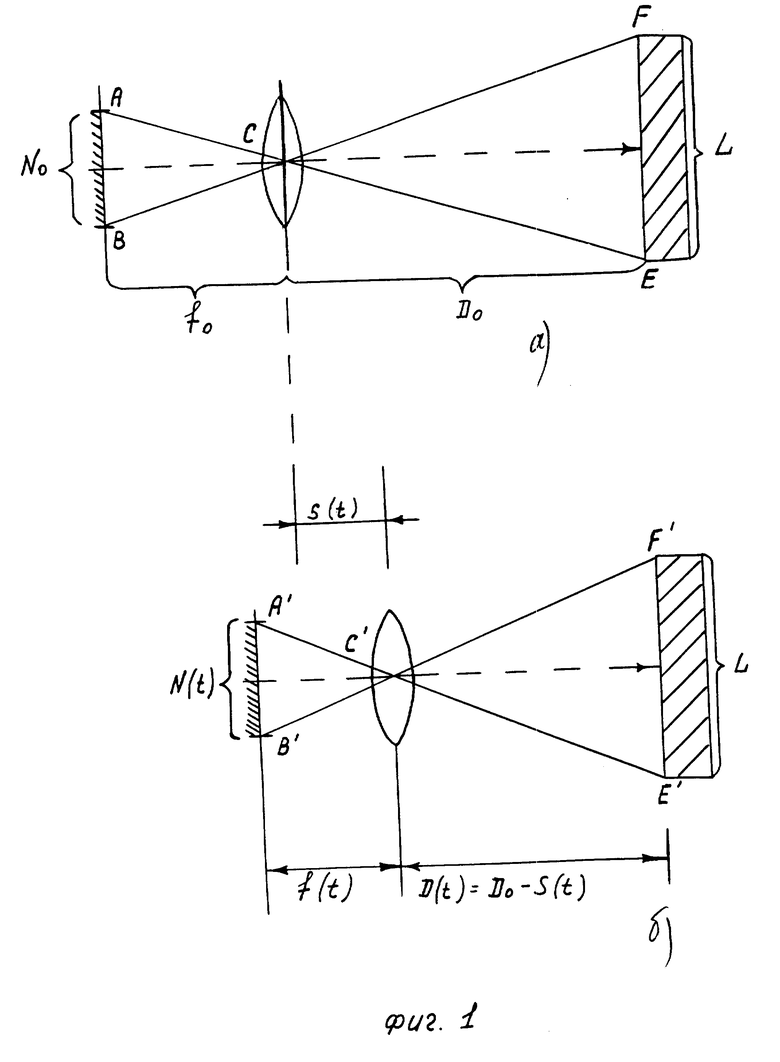
Способ определения расстояния до объекта при помощи оптического прибора, при котором измеряют размер изображения объекта в плоскости изображений оптического прибора, отличающийся тем, что дополнительно осуществляют перемещение оптического прибора вдоль его линии визирования по направлению к объекту или от него на фиксированное расстояние, вновь измеряют размер изображения объекта и определяют расстояние D(t) до объекта по формуле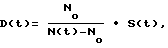
где Nо размер изображения объекта до перемещения;
N(t) размер изображения объекта после перемещения;
S(t) расстояние, на которое переместили оптический прибор.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Хорн Б.К.П | |||
| Зрение роботов | |||
| - М.: Мир, 1989, с.299 - 301 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Лазарев Л.П | |||
| Оптико-электронные приборы наведения | |||
| - М.: Машиностроение, 1989, с.255 - 257, рис | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
