Изобретение относится к подводному судостроению, а именно к спасательным подводным аппаратам (СПА), оснащенным средствами позиционирования и электронным наблюдательным оборудованием со средствами подводного освещения, и может быть использовано при проведении подводных аварийно-спасательных работ с использованием камер посадки и присоса.
Известно применение средств подводного наружного освещения для подводных аппаратов (ПА) в целях обеспечения визуального наблюдения за подводной средой через иллюминаторы аппаратов, а также других оптических зрительных систем для телевизионного наблюдения, фотографирования и киносъемки, сигнализации. Подводное телевизионное наблюдение предусматривает использование источников света, достаточно мощных для создания требуемой освещенности катодов передающих телевизионных трубок. При проведении спасательных подводных операций их телевизионный контроль представляется наиболее эффективным, поскольку получение телевизионного изображения осуществляется в реальном времени (или с запоминанием) и с большой разрешающей способностью, что позволяет проводить наблюдения в непосредственной близости от ПА, где неэффективны гидролокаторы, и на расстояниях, при которых существует видимость, в условиях сильного рассеяния и флуктуации интенсивности света из-за наличия в среде структурных неоднородностей различного происхождения. Физические условия в реальной морской среде, такие как температура воды, вибрации аппарата, забортное давление, могут существенно ограничить возможности любых оптических или электронно-оптических наблюдений при малом по величине соотношении «сигнал-шум». Эксперименты показывают, что дальность видимости при использовании телевизионной установки под водой зависит от коэффициента отражения, размеров наблюдаемого объекта и для условий Атлантического океана (тропики) составляет 18-24 м (Н.А.Стопцов, М.А.Груздев. Средства подводного освещения. Л., Судостроение, с.18-26). Однако отношение «сигнал-шум» при использовании подводного телевизионного наблюдения может быть увеличено не только за счет усовершенствования светотехнических характеристик собственно источников подводного освещения, таких как тип источника света, максимальная осевая сила света, рассеяние света и направленность пучка света, тип отражателя, но и за счет специального построения схемы наблюдений для коррелированного приема сигналов и учета помех.
Известно использование телевизионной системы наблюдений на исследовательской подводной лодке РХ-15 (Жак Пикар, Франция), для обеспечения работы которой установлена система наружного освещения из 20 прожекторов мощностью 500-1000 Вт каждый, которые размещены в определенных точках снаружи прочного корпуса аппарата. При достаточной освещенности известная оптико-телевизионная система обеспечивает визуальный контроль забортной среды для сопутствующих действий оператора по корректировке сигналов системы управления подводным аппаратом, а также позволяет проводить некоторые подводные работы, например, с использованием манипулятора. Недостатком известной системы подводного освещения, как и аппарата в целом, является ограниченность функциональных возможностей, а именно отсутствие автоматического влияния системы подводного освещения на систему управления ПА, что не позволяет осуществлять программированные действия, например, при заданном позиционировании ПА.
Известно использование оптико-телевизионной системы наблюдения в обитаемых и дистанционно управляемых ПА, например в ПА SHINKAI-2000, "JTV-1", «Dolphin-3К" (JAMSTEC) (M.Saeki, in "Ocean-84", v.2, p.917-920, IEEE, 1984). Указанные подводные аппараты оснащены оптико-телевизионной системой контроля забортной среды, которая составлена цветными и черно-белыми телевизионными камерами, системой широкополосного стереотелевидения, неподвижно закрепленной камерой и источниками ее освещения, используемыми для визуального контроля среды и регистрации исследуемых характеристик, а также рабочими органами и автоматической системой поддержания глубины и направления хода. Однако при наличии акустической навигационной системы, которая обеспечивает движение подводного аппарата в пространстве, оптико-телевизионная система используется лишь для визуального изучения среды, накопления информации, выбора направления перемещения, управления манипулятором или другими устройствами и т.п., что ограничивает точность динамического позиционирования ПА.
Известен поисковый ПА, включающий корпус в форме эллипсоида вращения с движителями вертикального и горизонтального хода и телекамеру, оптическая ось которой расположена в диаметральной плоскости аппарата и составляет с большой осью эллипсоида угол, равный половине угла обзора телекамеры, а линия метацентрической высоты аппарата образует с большей осью эллипсоида вращения угол, равный углу обзора телекамеры (патент РФ №2039678, МПК В 63 В 21/66, публ. 20.07.95). Телекамера, установка которой фиксирована, позволяет производить подводные наблюдения в широком телесном угле, однако ПА имеет при этом ограниченные функциональные возможности, поскольку информация, поступающая от телекамеры, не может быть непосредственно использована для автоматизации управления ПА в целях повышения точности его динамического позиционирования.
Известен спасательный ПА LR5, разработанный компанией Slingsby (Великобритания, 1978) для выполнения поисковых и спасательных работ на глубинах до 460 м, который в настоящее время используется в ВМС Великобритании для оказания помощи и спасения экипажей аварийных подводных лодок (ПЛ), лежащих на грунте, «сухим способом» с помощью съемной камеры присоса, предназначенной для стыковки прочного корпуса спасательного подводного аппарата и аварийной подводной лодки (Е.Р.Агишев, М.А.Ерпулев, А.А.Ерпулев. Конструктивные особенности спасательного подводного аппарата LR5. Судостроение, 1998, №3, с.20-22). Известный СПА включает прочный корпус цилиндрической формы, в агрегатном отсеке которого размещены системы управления движителем, включающие авторулевого, гидравлические системы и системы распределения энергии, вспомогательную систему управления движением аппарата при маневрировании вблизи аварийной ПЛ, динамическом позиционировании над ней и посадке на нее, состоящую из четырех забортных поворотных колонок с гребными винтами в насадках, а также съемную камеру присоса с опорным кольцом. При динамическом позиционировании ПА и подготовке к посадке на аварийную ПЛ, лежащую на грунте с креном и дифферентом, камеру присоса ориентируют относительно комингс-площадки ПЛ путем наклона опорного кольца камеры присоса на угол до 30 градусов (а при наличии специального клина - до 60 градусов), с обеспечением дифферента СПА при посадке на аварийную ПЛ в пределах +/-6,5 град. Для наблюдения за подводной средой в верхней части корпуса аппарата установлена прозрачная рубка из акрилового стекла, а в нижней части - в районе манипуляторов - цветная телекамера типа UMEL с 1334 строками, 70-мм фокусом, установленная на поворотно-наклоняющем устройстве. Для подводного освещения используют пять светильников мощностью по 1000 Вт. В известном СПА оптико-телевизионная система в составе телекамеры и светильников (осветительных элементов) использована лишь для визуальной оценки забортной обстановки и оценки результативности маневрирования (динамического позиционирования) СПА с помощью устройства отображения телевизионной информации, однако оно не оказывает влияния на систему маневрирования и динамического позиционирования, что не позволяет проводить позиционирование СПА и стыковку его с ПЛ в автоматическом режиме и достигать высокой точности динамического позиционирования с целью улучшения эксплуатационных характеристик СПА.
СПА, включающий корпус, размещенную в нем систему управления движением, установленные на корпусе вспомогательную систему маневрирования и динамического позиционирования, камеру присоса с опорным кольцом, систему наружного освещения с осветительными элементами, оптически сопряженную с ней оптико-телевизионную систему наружного наблюдения и устройство отображения телевизионной информации, выбран в качестве наиболее близкого аналога заявляемого изобретения.
Задача изобретения заключается в улучшении эксплуатационных характеристик СПА путем обеспечения высокоточного динамического позиционирования и выполнения маневрирования в автоматическом режиме с использованием оптико-телевизионной системы наружного наблюдения.
Задача решена тем, что в известном СПА, включающем корпус, размещенную в нем систему управления движением, установленные на корпусе СПА камеру присоса с опорным кольцом, а также вспомогательную систему маневрирования и динамического позиционирования, систему наружного освещения с осветительными элементами, оптически сопряженную с ней оптико-телевизионную систему наружного наблюдения и устройство отображения телевизионной информации, в соответствии с изобретением, в качестве камеры присоса выбрана камера, корпус которой включает подвижный шаровой пояс, оптико-телевизионная система наружного наблюдения выполнена в виде набора телевизионных камер, которые установлены для обеспечения дальнего обнаружения аварийного объекта и размещены на корпусе СПА вокруг камеры присоса с возможностью наблюдения опорного кольца с образованием многоракурсных стереопар, а система наружного освещения снабжена светомаркерами, которые установлены на опорном кольце камеры присоса, при этом устройство отображения телевизионной информации выполнено автоматизированным и связано через систему управления движением со вспомогательной системой маневрирования и динамического позиционирования.
Кроме того, подвижный шаровой пояс сегментирован с обеспечением относительного перемещения сегментов.
Кроме того, в качестве осветительных элементов выбраны галогенные лампы или светодиоды.
Кроме того, в качестве светомаркеров выбраны светодиоды с автономным электропитанием.
Кроме того, в качестве светомаркеров выбраны пассивные светоотражатели или фотолюминесцентные устройства.
Кроме того, по крайней мере, часть светомаркеров установлена на опорном кольце камеры присоса вдоль его периметра эквидистантно.
Технический результат изобретения заключается в получении изображений аварийного объекта, преимущественно аварийной ПЛ и ее комингс-площадки, под разными ракурсами в стереопарах, образуемых телевизионными камерами для обеспечения дальнего обнаружения, которые установлены заданным образом с учетом конструкции камеры присоса СПА, корпус которой включает подвижное звено - подвижный шаровой пояс, который сегментирован с возможностью относительного перемещения сегментов, геометрически также представляющих собой шаровые пояса. При этом сопоставление получаемых телевизионных изображений позволяет вести контроль хода стыковки опорного кольца камеры присоса СПА с комингс-площадкой аварийного объекта (аварийной ПЛ). В ходе позиционирования и стыковки производятся развороты сегментов подвижного шарового пояса корпуса камеры присоса и установка опорного кольца в нужном положении в пространстве (патент РФ №2157776) с вычислением отклонений положения СПА относительно объекта автоматизированным устройством отображения телевизионной информации и формированием с использованием вычисленных данных управляющих команд в системе управления движением. Путем подачи команд системы управления движением на вспомогательную систему маневрирования и динамического позиционирования можно осуществлять автоматическое управление динамическим позиционированием СПА.
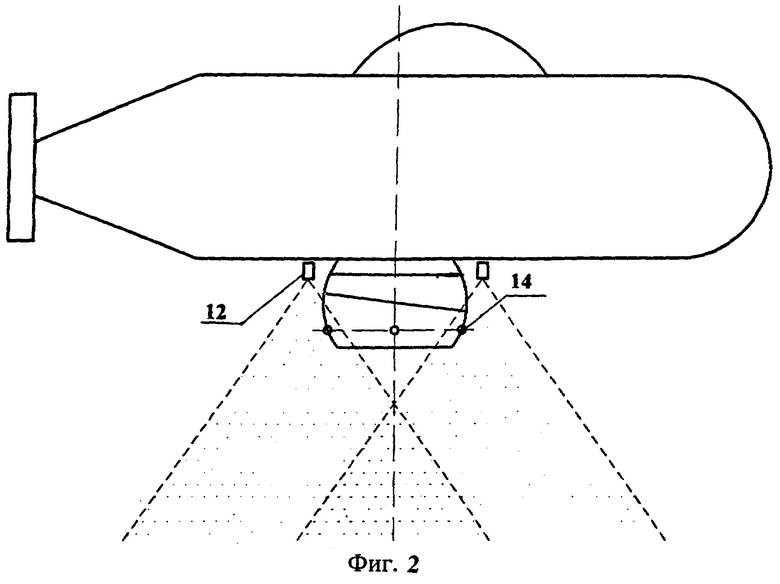
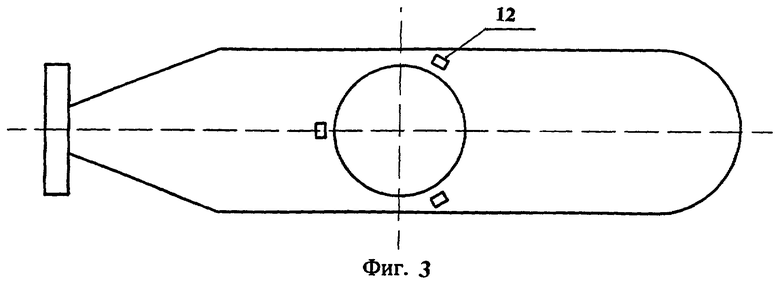
Сущность изобретения поясняется фиг.1-3. На фиг.1 представлена принципиальная схема стыковки двухкорпусного СПА с аварийным объектом (аварийной ПЛ) путем присоединения опорного кольца камеры присоса СПА, имеющей подвижное звено корпуса (шаровой пояс), к комингс-площадке аварийной ПЛ. На фиг.2 представлена схема установки на СПА с камерой присоса оптико-телевизионной системы в составе телевизионных камер для дальнего обнаружения аварийного объекта, которые образуют стереопары и оптически взаимодействуют со светомаркерами (вид сбоку в исходном положении; точками выделено поле зрения телевизионной камеры), на фиг.3 - то же, с фиг.2, вид снизу.
СПА 1 содержит прочный корпус 2, легкий корпус 3, движительно-рулевой комплекс 4, размещенное в легком корпусе 3 устройство маневрирования и динамического позиционирования 5, выполненное в виде системы вертикальных и горизонтальных рулей. В прочном корпусе 2 размещена система управления движением 6, к прочному корпусу 2 присоединена камера присоса 7, выполненная с подвижным звеном корпуса - сегментированным шаровым поясом 8 и опорным кольцом 9, которое выполнено с возможностью контакта и присоса к комингс-площадке 10 аварийного объекта (ПЛ) 11 (фиг.1).
Оптико-телевизионная система наружного наблюдения, условно представленная на фиг.1 двумя телевизионными камерами, в целом выполнена в виде набора телевизионных камер 12 (фиг.2-3) и связана оптически с осветительными элементами 13 и светомаркерами 14 системы наружного освещения. Телевизионные камеры 12 (фиг.2-3) предназначены для обеспечения дальнего обнаружения аварийного объекта (ПЛ) 11 и для обеспечения стыковки с ним камеры присоса 7. Телевизионные камеры 12 установлены определенным образом - с обеспечением пересечения их оптических осей, что обеспечивает наблюдение аварийного объекта под разными ракурсами, т.е. с образованием стереопар. Стереопары позволяют сочетать два плоских частичных изображения объекта, полученных с двух разных точек зрения (разных ракурсов) посредством двух телевизионных камер, для получения объемного изображения объекта. Свойством стереоизображения, получаемого при рассмотрении объекта в различных парах ракурсов, является неизменность положения объекта в пространстве для любых положений наблюдателя. Таким образом, для получения надежного объемного изображения объекта необходимо и достаточно наблюдать его, по крайней мере, в трех ракурсах, получаемых от трех телевизионных камер, которые можно попарно сочетать и путем корреляционной обработки принимаемых сигналов выделить информацию о пространственном положении или изменении положения объекта или его отдельных частей.
Схема расположения телевизионных камер 12 выбирается с учетом конструкции используемой камеры присоса 7 СПА 1. При использовании камеры присоса 7 с подвижным шаровым поясом 8 технически трудно разместить на таком корпусе телевизионные приемники 12 из-за возможности повреждения гибких телевизионных кабелей. Поэтому телевизионные камеры 12 для обеспечения дальнего обнаружения аварийного объекта устанавливают на корпусе СПА 1, а именно на легком корпусе 3 вокруг камеры присоса 7 симметрично относительно ее оси (фиг.2, 3). При этом телевизионные камеры 12 выбирают с таким полем зрения и размещают так, чтобы поверхность камеры присоса 7 и опорное кольцо 9 попадали в поле зрения каждой камеры 12 одновременно с комингс-площадкой 10 аварийного объекта (ПЛ) 11.
Необходимый комплект из трех телевизионных камер 12 для обеспечения дальнего обнаружения, установленный на легком корпусе 3 СПА 1, обеспечивает получение изображения комингс-площадки 10 аварийного объекта (ПЛ) 11 в стереопарах. Соответствующей коммутацией телевизионных камер 12 выбирают схему их подключения для реализации задач автоматизированной обработки телевизионной информации о позиционировании СПА 1 и коррекции положения СПА 1 в динамическом режиме, а также для возможного дублирования используемых стереопар и повышения надежности стыковки.
Система наружного освещения оптически сопряжена с телевизионными камерами 12 и включает осветительные элементы 13 - светильники, необходимые для обеспечения работы телевизионных камер 12, которые размещены над опорным кольцом 9, в частном случае, равномерно вдоль его периметра, что позволяет создать необходимую засветку всех телевизионных камер 12 и обеспечить локальную равномерную освещенность и видимость в области стыковки камеры присоса 7.
Осветительные элементы 13 (светильники) устанавливаются любым известным способом, например, на штанге, при этом каждая телевизионная камера 12 для дальнего обнаружения аварийного объекта 11 может быть снабжена индивидуальным светильником (на фиг.2-3 не отмечены). В зависимости от величины телесного угла засветки телевизионной камеры 12 такой светильник может быть единичным, в частности таким как галогенная лампа или светодиод, или составным, как, например, матрица светодиодов.
При этом на камере присоса 7 вдоль периметра опорного кольца 9 устанавливают дополнительно оптические приборы (элементы) - светомаркеры 14 таким образом, чтобы свет от них - их оптическое излучение, или пассивные возбуждаемое свечение (за счет фотолюминесценции), или отраженный свет попадал в поле зрения соответствующей телевизионной камеры 12, что определяет наименьшее общее количество светомаркеров - три.
В качестве осветительных элементов (светильников) 13 могут быть использованы оптические приборы, излучающие свет на длинах волн около 5000 нм, с герметизированным источником света, предназначенные для стационарной установки на ПА. В частности, такими светильниками могут служить галогенные лампы и светодиодные осветительные устройства, обеспечивающие малое затухание светового пучка в воде.
В качестве светомаркеров 14 могут быть выбраны как светоизлучающие оптические приборы, в частности светодиоды с автономным электропитанием, так и пассивные источники оптического излучения, в частности элементы на эффекте фотолюминесценции (метки, светящиеся под воздействием света светильников) или световозвращающие элементы (отражатели).
Размещение хотя бы части светомаркеров 14 на равных расстояниях друг от друга и от оси опорного кольца 9 (эквидистантно) обеспечивает сопоставимость наблюдений аварийного объекта 11 в стереопарах, что существенно при выполнении разворота подвижного шарового пояса 8 камеры присоса 7.
Телевизионные камеры 12, осуществляющие наблюдение с обеспечением дальнего обнаружения, соединены с подключенным к системе управления движением 6 автоматизированным устройством отображения телевизионного изображения 15.
Конструкция устройства 15 соответствует применяемому способу обработки телевизионной информации и включает, в частности, мини-ЭВМ (микроЭВМ, персональный компьютер) с видеопроцессором, подключенные к телевизионным камерам, аналого-цифровой преобразователь иных, помимо телевизионных, получаемых сигналов (например, с датчиков вектора скорости течения воды), также подключенный и к мини-ЭВМ, запоминающие устройства, дисплеи, интерфейс. Устройство 15 должно обеспечивать проведение арифметических и логических операций над массивами данных телевизионных сигналов и физических параметров, накопление и хранение больших объемов информации, их статистический (корреляционный) анализ, геометрические преобразования изображений (масштабирование, трансформацию в картографическую проекцию), выработку информационного сигнала, подаваемого в систему управления движением. В частности, если динамическое позиционирование производится с использованием известного метода измерения смещения координат центра тяжести изображения объекта, в качестве которого выступает комингс-площадка аварийного объекта (ПЛ), то обработка телевизионного сигнала будет включать оцифровку телевизионного изображения, выбор опорных точек - изображений светомаркеров - для определения координат центра тяжести изображения объекта, вычисление искомых координат центра тяжести изображения, сравнение сигналов телевизионных стереопар при позиционировании СПА, суммирование сигналов по заданному алгоритму для определения изменения во времени искомой величины и выработку информационных сигналов рассогласования для линейных и угловых перемещений СПА с учетом параллельно измеряемых параметров среды вблизи аварийного объекта (ПЛ) 11, которые поступают в систему управления движением 6. Сигналы рассогласования используются в системе 6 для формирования управляющих команд, подаваемых на подруливающие устройства и рули вспомогательного устройства маневрирования и динамического позиционирования 5. Для реализации описанного выше способа позиционирования по измерениям смещения центра тяжести изображения комингс-площадки 10 аварийного объекта (ПЛ) 11 может быть использовано, например, известное устройство (патент РФ №2040120), его взаимосвязь с системой управления движением 6 и через нее со вспомогательной системой маневрирования и динамического позиционирования 5 обеспечивает автоматизированное управление движением в реальном времени. В общем случае, устройство отображения телевизионной информации 15 может быть выполнено любым известным образом, позволяющим выполнять сравнительную обработку изображений от стереопар.
СПА 1 используют следующим образом.
СПА 1, движение которого обеспечено движительно-рулевым комплексом 4, выходит в район аварийного объекта (ПЛ) 11, занимает возможное или удобное для посадки на него положение, например курсом против течения, и зависает над комингс-площадкой 10 при включенных осветительных элементах 13 системы наружного освещения, после чего начинается позиционирование камеры присоса 7 с использованием разворота сегментов подвижного шарового пояса 8, при котором добиваются коаксиальности и параллельности опорного кольца 9 к комингс-площадке 10. При этом телевизионные камеры 12 оптико-телевизионной системы наружного наблюдения переводят в рабочий режим автоматического наведения и посадки СПА 1, который определяется выбранной схемой установки телевизионных камер 12, а также схемой обработки телевизионного изображения.
Телевизионные камеры 12, угол зрения которых под водой составляет порядка 45 градусов, ориентируют в направлении комингс-площадки 10. Для засветки каждой телевизионной камеры 12 используют светильник, обеспечивающий необходимую интенсивность светового пучка для обеспечения дальнего обнаружения аварийного объекта (ПЛ) 11, например составной, из двух галогенных или четырех светодиодных источника света (в подводном исполнении), которые размещают на расстоянии не менее 2 м от камеры. По изображению, полученному с телевизионной камеры 12, определяют пространственное положение комингс-площадки 10 аварийного объекта 11, к которому подходят, зависая на высоте 1-1,5 м.
На этом расстоянии телевизионные камеры 12 могут захватывать в поле зрения также и люк на комингс-площадке 10 и обеспечивать проведение измерения угла наклона комингс-площадки 10 к плоскости установки каждой стереопары. По телевизионному изображению светомаркеров 14 определяют углы наклона опорного кольца 9 к плоскости установки каждой стереопары.
Устройство обработки телевизионного изображения 15, которое сопоставляет сигналы стереопар, позволяет рассчитать по программе параметры взаимного расположения опорного кольца 9 и комингс-площадки 10, такие как их параллельность и углы наклона. При согласовании измеряемых параметров возможно осуществление стыковки. При этом система управления 6 вырабатывает адекватный сигнал управления, подаваемый на вертикальные и горизонтальные рули вспомогательной системы маневрирования и динамического позиционирования 5. В результате СПА 1 осуществляет стыковку фланца опорного кольца 9 камеры присоса 7 с комингс-площадкой 10 аварийного объекта 11.
В случае использования в качестве светомаркеров 14 пассивных световозвращающих элементов - отражателей, яркость которых значительно меньше, чем светодиодов, предусматривают установку их в количестве, по крайней мере, вдвое превышающем количество светодиодов, для обеспечения требуемой точности измерений.
При использовании в качестве светомаркеров 14 фотолюминесцентных устройств (меток) обеспечивают их защиту от водной среды с помощью покрытия, а размеры, количество и схему их установки выбирают с учетом возможности регистрации их свечения.
Опытная проверка работы оптико-телевизионной системы в подводных условиях при моделировании стыковки СПА 1 с аварийным объектом (ПЛ) 10 показала, что при частоте опроса телевизионного канала 5 Гц точность измерения линейных характеристик составляет не менее 1 см на дальности 2 м, а угловых - не ниже 2 градусов. Кроме того, удается регистрировать и учитывать в качестве помех угловые и линейные скорости перемещения посторонних объектов, которые попадают в поле зрения телевизионных приемников, уже при их контрасте 5%, причем точность измерения этих скоростей составляет соответственно 5 мм/с и 0,1 угл.град/сек, что повышает помехоустойчивость автоматизированного управления маневрированием ПА.
Обработка телевизионных сигналов может производиться любым известным способом, применимым для решения поставленных задач. Конкретный выбор схемы включения телевизионных камер для получения стереопар дальнего обнаружения, а также используемых светильников может быть произведен, исходя из конкретных условий и длительности проведения работ, энергоресурсов ПА и аппаратурно-программных средств обработки сигналов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2003 |
|
RU2248300C1 |
| Водолазно-спасательный глубоководный аппарат | 2020 |
|
RU2764140C1 |
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2016 |
|
RU2615029C1 |
| ПОДВОДНЫЙ АППАРАТ | 2003 |
|
RU2239581C1 |
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2007 |
|
RU2334650C1 |
| УСТРОЙСТВО ДЛЯ СТЫКОВКИ СПАСАТЕЛЬНОГО ПОДВОДНОГО АППАРАТА С ПОДВОДНЫМ ОБЪЕКТОМ И СПОСОБ СТЫКОВКИ С ЕГО ИСПОЛЬЗОВАНИЕМ | 2004 |
|
RU2250858C1 |
| Самоходный телеуправляемый спасательный колокол | 2017 |
|
RU2679381C1 |
| СПОСОБ СПАСАНИЯ ПОДВОДНИКОВ ИЗ ОТСЕКОВ АВАРИЙНОЙ ПОДВОДНОЙ ЛОДКИ | 2022 |
|
RU2797933C1 |
| УСТРОЙСТВО ДЛЯ ПРОВЕРКИ КОМИНГС-ПЛОЩАДОК И СПАСАТЕЛЬНЫХ ЛЮКОВ ПОДВОДНЫХ ЛОДОК | 2002 |
|
RU2334645C2 |
| СЪЕМНО-ЗАКРЕПЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ, ПОДВОДНОГО ВЫПУСКА И ПРИЕМА СПАСАТЕЛЬНОГО ПОДВОДНОГО АППАРАТА ПОДВОДНОЙ ЛОДКОЙ | 2014 |
|
RU2589500C2 |
Изобретение относится к судостроению, в частности, к подводным аппаратам для проведения аварийно-спасательных работ на подводных лодках. Спасательный подводный аппарат (СПА) содержит корпус с установленной на нем камерой присоса, систему управления движением, вспомогательную систему маневрирования и динамического позиционирования, систему наружного освещения, оптически сопряженную с оптико-телевизионной системой наружного наблюдения, и устройство отображения телевизионной информации. Камера присоса выполнена в виде подвижного шарового пояса с опорным кольцом. Система наружного освещения выполнена с осветительными элементами и светомаркерами, установленными на опорном кольце. Телекамеры упомянутой системы наблюдения установлены на корпусе СПА вокруг камеры присоса с возможностью наблюдения опорного кольца с образованием многоракурсных стереопар. Устройство отображения телевизионной информации выполнено автоматизированным и связано через систему управления движением со вспомогательной системой маневрирования и динамического позиционирования, Такое выполнение СПА обеспечивает его высокоточное динамическое позиционирование и маневрирование в автоматическом режиме. 5 з.п. ф-лы, 3 ил.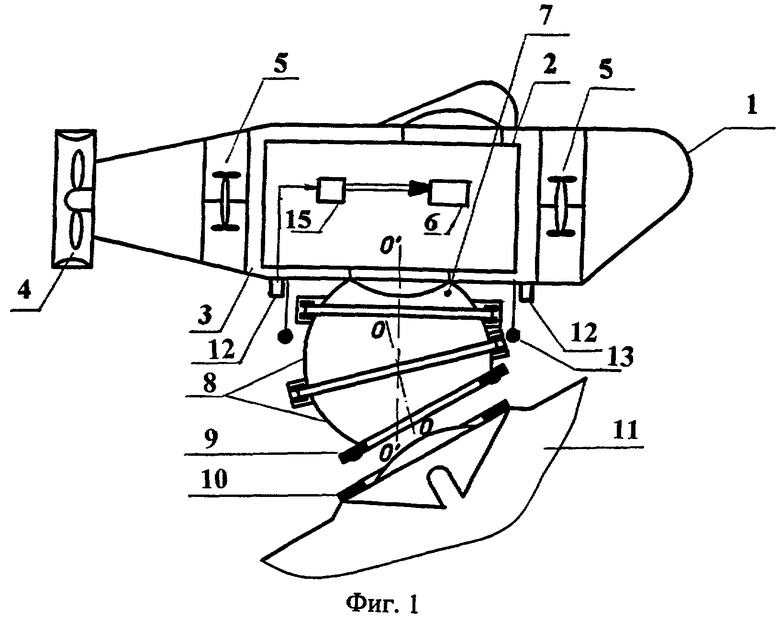
| ПОДВОДНЫЙ АППАРАТ | 2003 |
|
RU2239581C1 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО ДЛЯ ПОДВОДНОГО АППАРАТА | 1996 |
|
RU2157776C2 |
| GB 1600291 A, 14.10.1981 | |||
| US 5755532 A, 26.05.1998. | |||

