Изобретение относится к радиолокации и может быть использовано для распознавания классов воздушных целей.
Известно радиолокационное устройство распознавания воздушных целей, содержащее генератор, N умножителей частоты, N усилителей мощности, модулятор, антенный переключатель, антенну, N приемников, N фазовых детекторов, N пересчетных устройств, N-1 усилителей разностного сигнала, ЭВМ и устройство отображения (индикатор). При этом генератор своим выходом соединен со входами соответствующих из N умножителей частоты, выходы которых соединены со вторыми входами соответствующих из N усилителей мощности и вторыми входами соответствующих из N фазовых детекторов. Первые входы усилителей мощности соединены с выходом модулятора, а выходы через соответствующие из N входов антенного переключателя с антенной. N выходов антенного переключателя соединены со входами соответствующих из N приемников, выходы которых соединены с первыми входами соответствующих из N фазовых детекторов, выходы которых подключены ко входам соответствующих из N пересчетных устройств. Выход каждого n-го со 2-го по (N-1)-е пересчетное устройство соединен со 2-м входом (n-1)-го и первым входом n-го усилителей разностного сигнала. При этом выход 1-го пересчетного устройства соединен с 1-м входом 1-го усилителя разностного сигнала, а выход N-го пересчетного устройства со 2-м входом (N-1)-го усилителя разностного сигнала. Выходы N-1 усилителей разностного сигнала соединены с соответствующими из N-1 входов ЭВМ, выход которой подключен ко входу устройства отображения (индикатора).
По сравнению с известным устройством данное устройство обеспечивает распознавание воздушных целей, результат которого обладает достаточными различительными свойствами для правильного распознавания целей путем измерения их максимальных размеров. Однако распознавание воздушных целей с использованием эффекта резонанса не позволяет учитывать продольные размеры распознаваемых целей на различных ракурсах. Целью изобретения является повышение достоверности распознавания многоточечных воздушных целей в квазиоптической области отражения радиоволн.
Поставленная цель достигается тем, что в известном радиолокационном устройстве, содержащем первый генератор, импульсный модулятор, первый антенный переключатель, первую антенну и N приемных устройств, причем вход-выход первой антенны соединен со вход-выходом первого антенного переключателя, выход которого соединен со входом первого приемного устройства, согласно изобретению дополнительно введены N-1 антенн, N-1 генераторов, N-1 антенных переключателей и блок распознавания, включающий первый и второй сумматоры, N-1 линий задержки, N-1 дополнительных сумматоров, N-1 двухполупериодных выпрямителей, блок деления и блок идентификации, причем импульсный модулятор выходом соединен со входами N генераторов, выходами подключенных ко входам соответствующих из N антенных переключателей, вход-выходы со второго по N-й из которых соединены со вход-выходами соответствующих со второй по N-ю антенну, а выходы со входами соответствующих со второго по N-е приемных устройств. Выходы N приемных устройств соединены с соответствующими из N входов первого сумматора, выход которого соединен со входом "делитель" блока деления, выход которого соединен со входом блока идентификации. Выход первого приемного устройства также подключен к первому входу первого дополнительного сумматора, а выход каждого k-го со второго по N-е приемного устройства подключен ко входу (k-1)-й из N-1 линии задержки, выход каждой k-й с первой по (N-2)-ю из которых соединен со вторым (инверсным) входом k-го дополнительного сумматора и первым входом (k+1)-го дополнительного сумматора, а выход (N-1)-й линии задержки соединен со вторым (инверсным) входом (N-1)-го дополнительного сумматора. Выходы N-1 дополнительных сумматоров через соответствующие N-1 двухполупериодных выпрямителей соединены с соответствующими из N-1 входами второго сумматора, выход которого подключен ко входу "делимое" блока деления.
Предложенное построение схемы обеспечивает распознавание аэродинамической цели в динамике ее полета на различных ракурсах в квазиоптической области отражения радиоволн с учетом ее продольно-поперечных размеров.
На чертеже приведена структурная схема предлагаемого устройства.
Это устройство содержит N антенн 1, N антенных переключателей 2, N генераторов 3, N приемных устройств 4, импульсный модулятор 5 и блок распознавания, содержащий N-1 линий задержки 6, первый сумматор 7, N-1 дополнительных сумматоров 8, N-1 двухполупериодных выпрямителей 9, второй сумматор 10, блок деления 11 и блок идентификации 12. Импульсный модулятор 5 своим выходом связан со входами N генераторов 3, выходы которых связаны со вход-выходами соответствующих из N антенн 1 через входы соответствующих из N антенных переключателей 2, выходы которых связаны со входами соответствующих из N приемных устройств 4. При этом выходы N приемных устройств 4 связаны с соответствующими из со входов первого сумматора 7, а выход первого приемного устройства 4 соединен с первым входом первого дополнительного сумматора 8, выход каждого k-го со второго по N-е приемного устройства 4 подключен ко входу (k-1)-й из N-1 линии задержки 6, выход каждой k-й с первой по (N-2)-ю из которых соединен со вторым (инверсным) входом k-го дополнительного сумматора 8 и первым входом (k+1)-го дополнительного сумматора 8. Выход (N-1)-й линии задержки 6 соединен со вторым (инверсным) входом N-1-го дополнительного сумматора 8. При этом выходы N-1 дополнительных сумматоров 8 через соответствующие из N-1 двухполупериодных выпрямителя 9 соединены с соответствующими из N-1 входами второго сумматора 10, выход которого подключен ко входу "делимое" блока деления 11, выход которого соединен со входом блока идентификации 12.
Устройство работает следующим образом.
С помощью импульсного модулятора 5 возбуждаются генераторы 3, генерирующие сигналы на несущих частотах с разносом Δf между смежными частотами в полосе N•Δf, которые излучаются через антенные переключатели 2 и антенны 1 в направлении распознаваемой цели. Отраженные от цели сигналы принимаются антеннами 1 и через антенные переключатели 2 поступают на приемные устройства 4, которые содержат в своем составе преобразователи частот, фильтры, усилители, амплитудные детекторы и видеоусилители (на чертеже не показаны). С выходов приемных устройств 4 видеосигналы подаются на первый сумматор 7, а также с выхода первого приемного устройства 4 на первый вход первого дополнительного сумматора 8, а с выхода каждого k-го со второго по N-е приемного устройства 4 на вход (k-1)-й из N-1 линии задержки 6 и с выхода каждой k-й с первой по (N-2)-ю линии задержки на вторые (инверсные) входы k-го дополнительного сумматора 8 и на первый вход (k+1)-го дополнительного сумматора 8. При этом с выхода (N-1)-й линии задержки сигналы подаются на второй (инверсный) вход (N-1)-го дополнительного сумматора. Время задержки (N-1)-й линии задержки 6 равно NT, где T период повторения импульсов. Просуммированные сигналы с выходов N-1 дополнительных сумматоров 8 через соответствующие из N-1 двухполупериодных выпрямителей 9 поступают на соответствующие входы второго сумматора 10. Во втором сумматоре 10, а также в первом сумматоре 7, производится одновременное суммирование поступающих на их входы сигналов. С выхода второго сумматора 10 результирующий сигнал подается на вход "делимое" блока деления 11, на вход "делитель" которого поступает сигнал с выхода первого сумматора 7. Выходной сигнал блока деления 11 сравнивается в блоке идентификации 12 с набором пороговых сигналов, а по результатам сравнения определяется класс цели. При этом большая величина выходного сигнала блока деления 11 соответствует более сложной цели (большему количеству равноценных участков локального отражения на ее поверхности) или большему ее продольно-поперечному размеру (для целей, состоящих из равного количества участков локального отражения, но отличающихся величинами их продольно-поперечных разносов на поверхности цели).
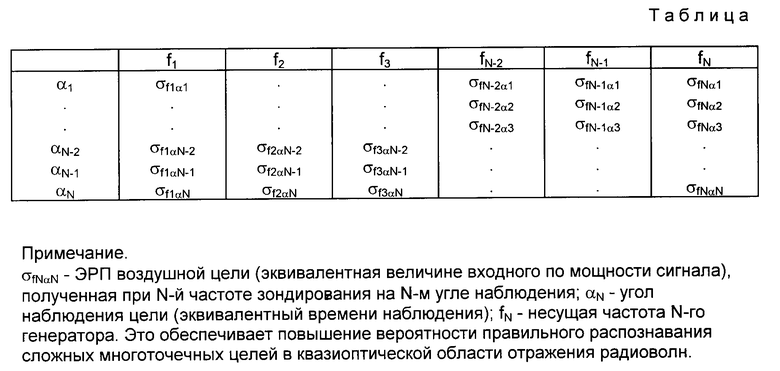
Различительный признак распознавания формируется в результате сравнения сигналов на N частотах под N углами визирования в динамике полета воздушной цели в турбулентной атмосфере, что эквивалентно частотным и угловым флуктуациям эффективной площади рассеяния (ЭПР) целей, расположенным по выделенной побочной диагонали матрицы, представленной в таблице.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1996 |
|
RU2096803C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ СИГНАЛОВ | 1996 |
|
RU2095826C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ СОСТАВА ЦЕЛИ | 1996 |
|
RU2095827C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1995 |
|
RU2083993C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1995 |
|
RU2079857C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ | 1996 |
|
RU2097782C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ ДВУХЧАСТОТНЫМ СПОСОБОМ | 1996 |
|
RU2114443C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ЦЕЛЕЙ | 1996 |
|
RU2099736C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 1995 |
|
RU2095822C1 |
| РАДИОЛОКАЦИОННОЕ РАСПОЗНАЮЩЕЕ УСТРОЙСТВО | 1996 |
|
RU2095824C1 |
Изобретение относится к радиолокации и может быть использовано для распознавания классов воздушных объектов. Целью изобретения является повышение достоверности радиолокационного распознавания аэродинамических целей в квазиоптической области отражения радиоволн. В известном ранее устройстве распознавания радиолокационных целей на основе эффекта резонанса, позволяющем лишь косвенно оценивать поперечные размеры распознаваемых целей, не обеспечивалась высокая достоверность распознавания аэродинамических целей в динамике их полета по прямолинейной траектории в турбулентной атмосфере на различных ракурсах. Для достижения поставленной цели предлагается в состав нового устройства включить N-1 антенн, N-1 антенных переключателей, N-1 генераторов и блок распознавания в составе первого и второго сумматоров, N-1 линий задержки, N-1 дополнительных сумматоров, N-1 двухполупериодных выпрямителей, блока деления и блока идентификации, изменяя соответствующим образом межблочные связи. Использование оценки угловой корреляции флуктуаций ЭПР различных аэродинамических целей на равноразнесенных углах визирования, достигнутое новым построением схемы устройства распознавания, обеспечивает прирост достоверности правильного распознавания аэродинамических целей. 1 ил., 1 табл.
Радиолокационное устройство распознавания воздушных целей, содержащее первый генератор, импульсный модулятор, первый антенный переключатель, первую антенну и N приемных устройств, причем вход-выход первой антенны соединен с входом-выходом первого антенного переключателя, выход которого соединен с входом первого приемного устройства, отличающееся тем, что дополнительно введены N 1 антенн, N 1 генераторов, N -1 антенных переключателей и блок распознавания, включающий первый и второй сумматоры, N 1 линий задержки, N 1 дополнительных сумматоров, N 1 двухполупериодных выпрямителей, блок деления и блок идентификации, причем импульсный модулятор выходом соединен с входами N генераторов, выходами подключенных к входам соответствующих из N антенных переключателей, входы-выходы с второго по N-й из которых соединены с входами-выходами соответствующих с второй по N-ю антенну, а выходы с входами соответствующих с второго по N-е приемных устройств, выходы N приемных устройств соединены с соответствующими из N входов первого сумматора, выход которого соединен с входом "Делитель" блока деления, выход которого соединен с входом блока идентификации, выход первого приемного устройства также подключен к первому входу первого дополнительного сумматора, а выход каждого К-го с второго по N-е приемного устройства подключен к входу (К-1)-й из N 1 линии задержки, выход каждой К-й с первой по (N 2)-ю из которых соединен с вторым входом К-го дополнительного сумматора и первым входом (К + 1)-го дополнительного сумматора, а выход (N 1)-й линии задержки соединен с вторым входом (N 1)-го дополнительного сумматора, выходы N 1 дополнительных сумматоров через соответствующие N 1 двухполупериодные выпрямители соединены с соответствующими из N 1 входами второго сумматора, выход которого подключен к входу "Делимое" блока деления.
| Небабин В.Г., Сергеев В.В | |||
| Методы и техника радиолокационного распознавания | |||
| - М.: Радио и связь, 1984, с.79, рис.3-21. |
