Изобретение относится к радиолокационной технике и может быть использовано для распознавания воздушных целей различных геометрических размеров и форм.
Известно устройство распознавания радиолокационных целей, содержащее последовательно соединенные генератор, 1-й умножитель частоты, усилитель мощности, антенный переключатель и антенну, причем выход генератора связан также со входом 2-го умножителя частоты и 1-м входом фазового детектора, выход которого соединен со входом индикатора, а 2-й вход с выходом усилителя промежуточной частоты, вход которого подключен к выходу смесителя, 1-й и 2-й входы которого связаны соответственно с выходом второго умножителя частоты и антенного переключателя, а 2-й вход усилителя мощности соединен с выходом импульсного модулятора [1]
Это устройство обеспечивает обнаружение перемещающихся искусственных целей на фоне подстилающей поверхности, а также их распознавание на основе эффекта Доплера. Однако оно не может обеспечить обнаружение и распознавание неподвижных целей на фоне подстилающей поверхности.
Известно также радиолокационное устройство распознавания целей [2] состоящее из индикатора и приемопередатчика, содержащего генератор, импульсный модулятор (ИМ), усилитель мощности (УМ), антенный переключатель (АП), антенну, 1-й и 2-й смесители, гетеродин, усилитель промежуточной частоты (УПЧ) и фазовый детектор (ФД). При этом генератор связан своим выходом со 2-м входом 1-го смесителя и 1-м входом УМ, 2-й вход которого связан с выходом ИМ, а выход с антенной через АП, выход которого связан с 1-м входом 2-го смесителя, 2-й вход которого соединен с выходом 1-го смесителя, а выход связан со входом УПЧ, выход которого подключен ко 2-му входу ФД, выход которого связан с индикатором, а 1-й вход связан с выходом гетеродина и 1-м входом 1-го смесителя.
Данное устройство не обеспечивает высокой достоверности распознавания воздушных целей, так как оно не может распознавать неподвижные или малоподвижные цели на фоне местных предметов и метеообразований, а также цели, имеющие одинаковые радиальные составляющие вектора скорости.
Целью изобретения является повышение вероятности правильного распознавания воздушных целей за счет использования высокоинформативного признака распознавания, характеризующего скорость изменения уровня отраженного целью сигнала при перестройке частоты зондирующего ЛЧМ-сигнала и усредненного в пределах половины угловой длительности наиболее широкого лепестка диаграммы обратного вторичного излучения (ДОВИ) цели.
Поставленная цель достигается тем, что состав известного устройства распознавания [2] дополняется синхронизатором, генератором линейно-частотно-модулированного (ЛЧМ) сигнала, амплитудным детектором (АД), усилителем высокой частоты (УВЧ), сумматором, 1-й и 2-й линиями задержки (ЛЗ), 1-м и 2-м интеграторами, двухполупериодным выпрямителем (ДППВ), блоком деления (БД), делителем частоты (ДЧ) и блоком идентификации (БИ). При этом синхронизатор связывают со входом ИМ и входом ДЧ, выход которого подключают ко входу 2-й ЛЗ и 1-му входу БИ, 2-й вход которого соединяют с выходом БД, 1-й вход которого связывают с выходом 1-го интегратора, а 2-й вход с выходом 2-го интегратора, 2-й вход которого соединяют с выходом 2-й ЛЗ и 2-м входом 1-го интегратора, 1-й вход которого подключают к выходу ДППВ, вход которого связывают с выходом сумматора, 2-й вход которого соединяют с выходом 1-й ЛЗ, а 1-й вход со входом 1-й ЛЗ, 1-м входом 2-го интегратора и выходом АД, вход которого связывают с выходом УПЧ. Генератор ЛЧМ-сигнала соединяют при этом с 1-м входом 1-го смесителя, а выход АП связывают со входом УВЧ, выход которого подключают к 1-му входу 2-го смесителя, 2-й вход которого соединяют с выходом генератора, а выход 1-го смесителя связывают с 1-м входом УМ. Следует заметить, что на 1-м входе сумматора предполагается наличие инвертора, который обеспечивает формирование на выходе сумматора напряжения, пропорционального разности сигналов на его 2-м и 1-входах входах, что необходимо для правильной работы предлагаемого устройства.
Предложенное построение схемы позволяет заявляемому устройству повысить качество распознавания воздушных целей разных размеров и конфигураций за счет анализа величин изменения уровней огибающих узкополосных импульсных ЛЧМ-сигналов, отраженных целями на разных углах локации.
На чертеже представлена структурная схема предлагаемого устройства распознавания целей.
Данное устройство содержит генератор 1, 1-й смеситель 2, УМ 3, антенну 4, синхронизатор 5, генератор ЛЧМ-сигнала 6, ИМ 7, АП 8, АД 9, УПЧ 10, 2-й смеситель 11, УВЧ 12, сумматор 13, 1-ю ЛЗ 14, 21-й интегратор 15, 2-ю ЛЗ 16, ДППВ 17, 1-й интегратор 18, БД 19, БИ 20 и ДЧ 21. Выход генератора 1 связан со 2-м входом 1-го смесителя 2 и 2-м входом 2-го смесителя 11, 1-й вход которого связан с выходом УВЧ 12, вход которого подключен к выходу АП 8, вход-выход которого связан со вход-выходом антенны 4, а вход с выходом УМ 3, 1-й вход которого подключен к выходу 1-го смесителя 2, а 2-й вход к выходу ИМ 7, вход которого связан с выходом синхронизатора 5 и входом ДЧ 21, выход которого соединен со входом 2-й ЛЗ 16 и 1-м входом БИ 20, 2-й вход которого связан с выходом БД 19, 2-й вход которого подключен к выходу 2-го интегратора 15, а 1-й вход к выходу 1-го интегратора 18, связанного своим 1-м входом с выходом ДППВ 17, а 2-м входом с выходом 2-й ЛЗ 16 и 2-м входом 2-го интегратора 15, 1-й вход которого соединен со входом 1-й ЛЗ, 1-м входом сумматора 13 и выходом АД 9, вход которого связан с выходом УПЧ 10, соединенного своим входом с выходом 2-го смесителя 11. Выход генератора ЛЧМ-сигнала 6 подключен к 1-му входу 1-го смесителя 2, а выход 1-й ЛЗ 14 ко 2-му входу сумматора 13.
Устройство работает следующим образом.
Генератор 1 вырабатывает высокочастотные электромагнитные колебания на средний несущей частоте f0 и подает их на 2-й вход 1-го смесителя 2, на 1-й вход которого поступает сигнал с выхода генератора ЛЧМ-сигнала 6, что вырабатывает электромагнитные колебания со средней частотой fпр, изменяющейся от fпр - Δfлчм/2 до fпр + Δfлчм/2 где Δfлчм девиация ЛЧМ-сигнала. На выходе блока 2 получается сигнал на частоте fo + fпр ± Δfлчм/2 поступающий на 1-й вход УМ 3, где усиливается и модулируется по 2-му входу (преобразуется в импульсный) сигналами ИМ 7, который, в свою очередь, синхронизирован импульсными сигналами синхронизатора 5. С выхода УМ 3 мощные ЛЧМ-импульсы через АП 8 поступают на вход антенны 4 и излучаются ею в направлении распознаваемой цели.
Сигналы, отраженные целью, принимаются антенной 4 и через АР 8 передаются на вход УВЧ 12, где происходит их усиление на высокой частоте. С выхода УВЧ 12 отраженные сигналы поступают на 1-й вход 2-го смесителя 11, 2-й вход которого соединен с выходом генератора 1. В смесителе 11 происходит преобразование частоты отраженных сигналов, и на его выходе формируется сигнал на частоте fпр ± Δfлчм/2 который подается на вход УПЧ 10. Являясь широкополосным, УПЧ 10 усиливает и пропускает на свой выход все сигналы, частота которых находится в пределах от fпр - Δfлчм/2 до fпр + Δfлчм/2 Эти сигналы поступают на вход АД 9, где производится выделение огибающей отраженного сигнала. С выхода АД 9 сигнал поступает на 1-й вход сумматора 13, вход 1-й ЛЗ 14 и 1-й вход 2-го интегратора 15.
Известно, что в квазиоптической области отражения радиоволн изрезанность огибающей отраженного ЛЧМ-сигнала определяется индивидуальными особенностями целей. У целей более крупных размеров и более сложной формы флюктуации амплитуды огибающей наиболее ярко выражены по сравнению с малоразмерными целями. У малоразмерных целей амплитуда огибающей отраженного ЛЧМ-сигнала изменяется медленнее, то есть время корреляции сигналов таких целей больше. Отсюда очевидно, что за один и тот же интервал времени (меньший по длительности, чем время поворота цели в азимутальной плоскости на угол, равный ширине наименьшего лепестка ДОВИ, наиболее крупноразмерной из всех распознаваемых целей) изменение амплитуды огибающей у малоразмерной цели на большинстве углов визирования будет меньше, чем у крупноразмерной. Этот факт положен в основу работы предлагаемого устройства. Для выделения информации о скорости изменения амплитуды огибающей ЛЧМ-сигнала в схеме устройства используется 1-я ЛЗ 14. Задержанный в ней сигнал поступает на 2-й вход сумматора 13, который, в соответствии со своим назначением, выделяет на выходе напряжение, равное разности сигналов на его 2-м и 1-м входах.
При выборе времени задержки Δtз 1-й ЛЗ 14 учитывается то, что использование узкополосного ЛЧМ-сигнала позволяет анализировать лишь малую часть амплитудно-частотной характеристики (АЧХ) цели. В данном случае предлагается анализировать интервал АЧХ, равный половине самого узкого лепестка интерференционной картины, то есть самого узкого периода структуры АЧХ. Полоса частотного анализа, связанная с длительностью задержки Δtз (в течение которой определяется вариация амплитуды огибающей отраженного ЛЧМ-сигнала), выбирается из соотношения
Δfан = c/(4Lмакс), (1)
где c скорость света; Lмакс максимальное расстояние между рассеивающими центрами (РЦ) в радиальном направлении среди всех распознаваемых целей на всех ракурсах локации.
Если τи длительность ЛЧM-импульса, то справедлива пропорция
Δfлчм/τи = Δfан/Δtз,
откуда Δtз= τиΔfан/Δfлчм. (2)
С учетом (1) выражение (2) принимает вид
Δtз = cτи/(4LмаксΔfлчм). (3)
Пусть f0 5 ГГц. Широкополосность антенн современных РЛС позволяет передавать и принимать без искажений ЛЧМ-сигналы с девиацией, не превышающей 5% от f0. Условимся что,  составляет 4% от f0, то есть 200 МГц. Тогда для Lмакс 35 м получим
составляет 4% от f0, то есть 200 МГц. Тогда для Lмакс 35 м получим
Δtз= 3•108τи/(4•35•2•105) ≈ 0,01τи,
что обеспечит анализ АЧХ цели на интервале 99% от τи при последовательном сравнении амплитуды огибающей отраженного сигнала с ее же значениями, задержанными на Δtз Для сравнения укажем, что использование узкополосных ЛЧМ-сигналов с девиацией частоты, равной 0,1% от f0, при f0 3 ГГц и Lмакс 50 м, приводит к анализу АЧХ всего на половине длительности импульса.
С выхода сумматора 13 разностный сигнал подается на вход ДППВ 17, который, не изменяя амплитуды входных сигналов, делает их однополярными и подает на 1-й вход 1-го интегратора 18. Данный интегратор, аналогично 2-му интегратору 15, формирует на своем выходе сигнал, пропорциональный проинтегрированному значению всех поступивших на его вход видеосигналов. Выходной сигнал 1-го интегратора 18 поступает на 1-й вход БД 19, на 2-й вход которого подается выходной сигнал 2-го интегратора 15, необходимый для нормировки выходного сигнала 1-го интегратора 18, то есть для обеспечения независимости результатов распознавания цели от дальности. БД 19 имеет на выходе сигнал, пропорциональный частному от деления сигналов на его 1-м и 2-м входах, который подается на 2-й вход БИ 20. В БИ 20 производится сравнение указанного входного сигнала с набором пороговых сигналов, а по результатам сравнения определяется класс цели. Однако данное сравнение производится только при поступлении на 1-й вход БИ 20 управляющего сигнала, который подается значительно реже, чем следуют отраженные ЛЧМ-сигналы. Это обусловлено тем, что отраженный от сложной крупноразмерной цели ЛЧМ-сигнал может попасть на такой интервал анализа АЧХ, где изменение амплитуды огибающей будет незначительным, то есть будет соответствовать перепадам амплитуды огибающей малоразмерной цели. В этом случае результат распознавания может быть ошибочным. Чтобы этого не произошло, сигнал, подлежащий распознаванию в БИ 20, должен быть усреднен по нескольким углам визирования цели, поскольку вероятность попадания интервалов анализа отраженных сложной целью ЛЧМ-сигналов на пологие участки АЧХ на многих углах локации мала, и возможные ошибки распознавания тем меньше, чем большее количество реализаций участвует в формировании результирующего сигнала, сравниваемого с пороговыми значениями в БИ 20. Сектор углов локации α1, α2, ... , αn в пределах которого производится анализ отраженных ЛЧМ-сигналов, определяется из выражения
Δαан = λ/(4Lмин), (4)
где Lмин минимальный разнос РЦ вдоль фронта волны РЛС на всех из назначенных для распознавания целей. Величина указанного сектора определяется динамикой вращения цели вокруг ее центра масс в азимутальной плоскости с угловой скоростью ωц и обеспечивается наблюдением цели в течение времени Tнаб TиK, где Tи период повторения ЛЧM-импульсов, K - коэффициент деления частоты следования ЛЧМ-импульсов в ДЧ 21. Тогда Δαан = ωцTиK, откуда следует выражение для определения K
K = λ/(4LминωцTи). (5)
С его помощью можно определить, что для f0 5 ГГц, Lмин 1 м, ωц = 2°/c и Tи 1000 мкс получим K 430, а для f0 9 ГГц, Lмин 2 м, ωц = 3°/c и Tи 400 мкс K 200. Таким образом, для анализа сигнала и распознавания цели надо накапливать информацию, содержащуюся в K отраженных ЛЧМ-импульсах, что может быть реализовано в РЛС сопровождения цели или в РЛС обнаружения цели с малой скоростью вращения антенны (менее 1 оборота в минуту).
Для реализации вышеуказанного алгоритма синхронизатор 5 подает на вход ДЧ 21 синхроимпульсы, к которым привязан период повторения импульсов РЛС. ДЧ 21 делит частоту следования синхроимпульсов в K раз, обеспечивая выполнение условия выражения (5), и подает прореженные импульсы на 1-й (управляющий) вход БИ 20. Одновременно прореженные импульсы поступают на вход 2-й ЛЗ 16, где задерживаются на время τи и поступают на вторые входы 1-го и 2-го интеграторов 18 и 15 для их сброса (обнуления), подготавливая их тем самым к очередному циклу распознавания. Задержка сигнала в ЛЗ 16 нужна для того, чтобы не сорвать процесс подачи на БД 19 выходных сигналов 1-го и 2-го интеграторов в момент поступления на 1-й вход БИ 20 сигнала, разрешающего его работу.
Из приведенного описания работы устройства видно, что БИ 20 производит распознавание целей по величинам перепадов уровня огибающей импульсного ЛЧМ-сигнала, усредненного по K углам визирования цели. Предложенное устройство способно обеспечить высокую достоверность распознавания воздушных целей различных размеров и форм, имеющих как разные, так и одинаковые радиальные скорости, как в свободном пространстве, так и на фоне подстилающей поверхности в широком диапазоне дальностей, так как признак распознавания является информативным и не зависящим от дальности до цели.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1996 |
|
RU2096803C1 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ ЦЕЛЕЙ НА ФОНЕ ПОМЕХ | 1998 |
|
RU2139552C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ СИГНАЛОВ | 1996 |
|
RU2095826C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ СОСТАВА ЦЕЛИ | 1996 |
|
RU2095827C1 |
| РЛС РАСПОЗНАВАНИЯ ЦЕЛЕЙ | 1996 |
|
RU2095825C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ | 1996 |
|
RU2097782C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ ДВУХЧАСТОТНЫМ СПОСОБОМ | 1996 |
|
RU2114443C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ | 1995 |
|
RU2099744C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 1995 |
|
RU2095822C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1995 |
|
RU2099735C1 |
Изобретение относится к радиолокационной технике и может быть использовано в интересах распознавания воздушных целей с помощью РЛС с узкополосным импульсным ЛЧМ-сигналом. Цель изобретения - повысить вероятность правильного радиолокационного распознавания воздушных целей. Поставленная цель достигается тем, что состав известного устройства распознавания [2] дополняется синхронизатором, генератором линейно-частотно-модулированного сигнала, амплитудным детектором, усилителем высокой частоты, сумматором, 1-й и 2-й линиями задержки, 1-м и 2-м интеграторами, двухполупериодным выпрямителем, блоком деления, делителем частоты и блоком идентификации. При этом соответствующим образом изменяются межблочные связи. За счет этого при распознавании целей используется высокоинформативный признак, характеризующий скорость изменения уровня сигнала, отраженного целью при перестройке частоты зондирующего ЛЧМ-сигнала, а также усредненного в пределах половины угловой длительности наиболее широкого лепестка диаграммы обратного вторичного излучения цели. Использование данного признака повышает достоверность распознавания целей в широком диапазоне дальностей. 1 ил.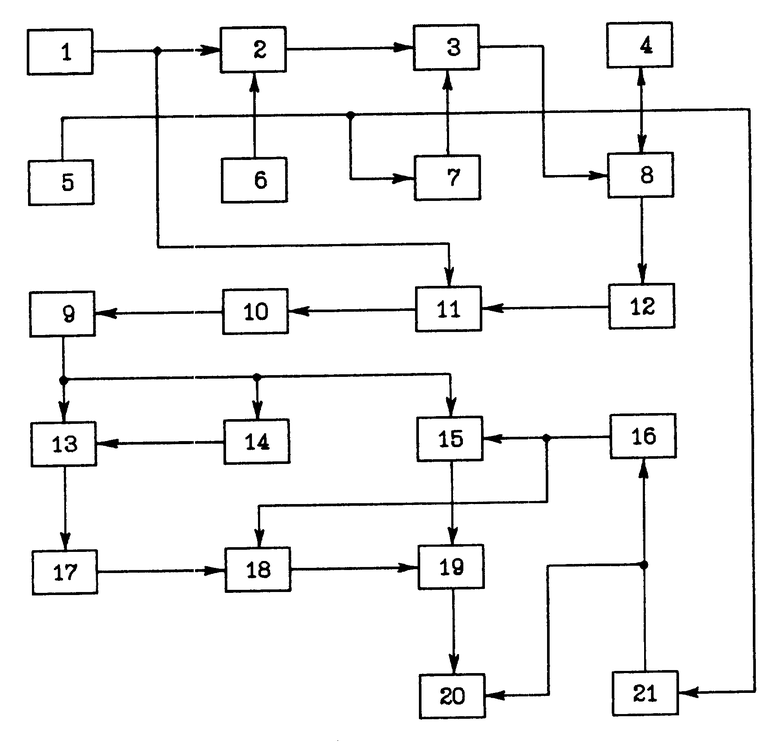
Устройство распознавания целей, содержащее первый смеситель, связанный с его вторым входом своим выходом генератор, второй смеситель, связанный с его выходом своим входом усилитель промежуточной частоты, антенну, связанный с ней своим входом-выходом антенный переключатель, связанный с его входом своим выходом усилитель мощности и связанный с его вторым входом своим выходом импульсный модулятор, отличающееся тем, что дополнительно в состав устройства введены синхронизатор, генератор линейно-частотно-модулированного сигнала, усилитель высокой частоты, амплитудный детектор, сумматор, первая и вторая линии задержки, первый и второй интеграторы, двухполупериодный выпрямитель, блок деления, делитель частоты и блок идентификации, причем вход импульсного модулятора связан с выходом синхронизатора и входом делителя частоты, выход которого соединен с входом второй линии задержки и первым входом блока идентификации, второй вход которого подключен к выходу блока деления, первый вход которого связан с выходом первого интегратора, первый вход которого соединен с выходом двухполупериодного выпрямителя, а второй вход с выходом второй линии задержки, вторым входом второго интегратора, выход которого подключен к второму входу блока деления, а первый вход к входу первой линии задержки, выходу амплитудного детектора и первому входу сумматора, второй вход которого связан с выходом первой линии задержки, а выход с входом двухполупериодного выпрямителя, вход амплитудного детектора соединен с выходом усилителя промежуточной частоты, первый вход второго смесителя с выходом усилителя высокой частоты, связанного своим входом с выходом антенного переключателя, второй вход второго смесителя подключен к выходу генератора, выход генератора линейно-частотно-модулированного сигнала связан с первым входом первого смесителя, выход которого соединен с первым входом усилителя мощности.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авиационные радиолокационные устройства / Под ред | |||
| П.И.Дудника | |||
| - М.: ВВИА им.Н.Е.Жуковского, 1986, с.200, рис.7.12 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Там же, с.201, рис.7.13. | |||
