Устройство относится к радиолокационной технике и может быть использовано для распознавания воздушных целей по сигналам, отраженным данными целями.
Известна РЛС "Микронетикс" [1] которая может быть использована для распознавания радиолокационных целей по радиолокационным дальностным портретам, получаемым за счет облучения целей импульсами короткой длительности (1 нс). Использование этих импульсов позволяет достичь разрешающей способности по дальности δD 15 см и, тем самым, наблюдать результаты отражения импульсов от различных элементов конструкции цели. РЛС "Микронетикс" включает эквивалент антенны, последовательно включенные высокочастотный тройник, выходной усилитель и первую антенну, последовательно соединенные магнетронный генератор, схему формирования зондирующих импульсов, элемент связи, детектор запуска и импульсный осциллограф, последовательно включенные вторую антенну, прецизионный аттенюатор, малошумящую лампу бегущей волны, усилитель мощности и детектор коротких импульсов, выход которого связан со вторым входом импульсного осциллографа. При этом второй выход элемента связи соединен со входом высокочастотного тройника, второй выход которого подключен ко входу эквивалента антенны.
Недостатком данной РЛС является то, что она позволяет определять радиолокационные характеристики целей на дальностях до единиц километров, а это в настоящее время сужает область использования таких РЛС особенно для решения задач распознавания. Описанная РЛС в виду данного недостатка используется лишь в экспериментальных исследованиях [1] Другим недостатком РЛС "Микронетикс" является необходимость двух антенн, что усложняет конструктивное исполнение. И, наконец, в условиях отсутствия точной априорной информации о сигнатурах целей определенных классов на всевозможных ракурсах, а также из-за сложности зрительной идентификации оператором эталонных и реальных сигнатур достоверность распознавания целей данной РЛС является недостаточной.
Известна также РЛС с автоматическим фильтром распознавания [2] в которой распознавание и идентификация целей осуществляются оператором путем сравнения принимаемых эхо-сигналов с эталонными радиоимпульсными портретами известных целей, то есть путем сравнения радиолокационных портретов реальных целей и эталонов. Одновременно указывается, что в данной РЛС можно добиться более эффективного распознавания радиолокационных целей, если вместо радиолокационных портретов оценивать сигналы, представляющие собой сумму радиоимпульсов, отраженных отдельными блестящими точками (БТ) на поверхности цели.
РЛС с автоматическим фильтром распознавания включает передатчик, гетеродин, цифровое управляющее устройство (ЦУУ), последовательно соединенные антенну, антенный переключатель, усилитель высокой частоты (УВЧ), 1-й смеситель, усилитель промежуточной частоты (УПЧ), автоматический фильтр распознавания (АФР), амплитудный детектор и индикатор, причем второй вход антенного переключателя связан с выходом передатчика, второй вход первого смесителя с выходом гетеродина, а второй вход АФР с выходом ЦУУ.
Данная РЛС использует для зондирования мощные линейно-частотно-модулированные импульсы, что позволяет распознавать цели на больших дальностях. Однако данной РЛС также свойственны определенные недостатки.
Во-первых, для разрешения БТ, находящихся на поверхности цели с разносом по дальности около 1 м друг от друга, требуется применение зондирующих ЛЧМ-сигналов с девиацией частоты не менее Δf 150 МГц. Практическая реализация ЛЧМ-сигналов с указанной девиацией частоты на современном уровне развития радиолокационной техники является проблематичной задачей.
Во-вторых, для обеспечения нормального режима работы дисперсионных ультразвуковых линий задержки (ДУЗЛЗ), используемых для сжатия отраженных сигналов, перед ними, как правило, устанавливаются амплитудные ограничители, производящие нормировку сжимаемого сигнала, что приводит к потере информации об интенсивности БТ цели. Указанная нормировка не позволяет в полной мере использовать для распознавания информацию, заключенную в амплитудах сигналов, отраженных от БТ цели. При этом сохраняется возможность распознавания целей лишь по количеству и характеру расположения БТ на цели вдоль линии визирования РЛС.
В-третьих, описываемая РЛС для каждой назначенной для распознавания цели требует наличия своего индивидуального фильтра распознавания и других вспомогательных устройств, что служит причиной сложности и громоздкости технической реализации такой РЛС.
В-четвертых, вероятность (достоверность) распознавания целей в данной РЛС не может быть достаточно высокой, так как зрительно-идентификационные возможности оператора-распознавальщика ограничены, что связано с невозможностью хранения в его памяти большого числа эталонов, критичных ко многим факторам.
В-пятых, при распознавании целей по сумме сигналов, отраженных различными БТ цели, вероятность правильного распознавания будет также низкой, так как для целей с различной конфигурацией и разным числом БТ может быть получен одинаковый суммарный сигнал.
Целью изобретения является повышение достоверности радиолокационного распознавания воздушных целей за счет идентификации сигналов, отраженных данными целями, при использовании квазимонохроматического импульсного зондирования.
Поставленная цель достигается тем, что в предлагаемом устройстве анализируется результат интерференции волн, отраженных от различных блестящих точек, разнесенных в радиальном направлении, при зондировании цели квазимонохроматическим сигналом. Как известно, электромагнитная волна (ЭМВ) имеет конечную скорость распространения, и значит, она достигает разных БТ в разные моменты времени. Именно в эти моменты за счет интерференции отражений квазимонохроматических (в пределах импульса) ЭМВ от изменившегося количества БТ происходит скачкообразное изменение интенсивности результирующей отраженной ЭМВ. Величина этой интенсивности зависит от количества БТ, участвующих в отражении, их эффективных площадей рассеяния (ЭПР) и взаимного расположения фазовых центров этих БТ между собой. Таким образом, у целей с различными размерами, геометрией и величинами ЭПР составляющих их БТ (фиг. 1, а, б) интенсивности отражений и амплитуды их перепадов в фиксированные моменты времени будут отличаться (фиг. 1, в, г). Указанный факт положен в основу работы предлагаемого устройства распознавания. Для этого в состав известного устройства [2] дополнительно включают импульсный модулятор, усилитель мощности, задающий генератор, 2-й смеситель, последовательно включенные линия задержки (ЛЗ), сумматор, двухполупериодный выпрямитель (ДППВ), интегратор и блок идентификации, причем задающий генератор связывают одновременно с 1-м входом 1-го смесителя и 1-м входом усилителя мощности, 2-й вход которого соединяют с выходом импульсного модулятора, а выход со входом антенного переключателя, выход которого подключают к 1-му входу 2-го смесителя, 2-й вход которого соединяют с выходом 1-го смесителя, а выход со входом УПЧ, выход которого связывают со входом амплитудного детектора, выход которого соединяют со входом ЛЗ и вторым входом сумматора.
Предложенное построение схемы позволяет за счет оценки количества и величин перепадов уровня отраженного сигнала в пределах одного импульса производить распознавание целей с высокой вероятностью. Признаком распознавания выступает сумма абсолютных величин перепадов амплитуды отраженного сигнала. Данный признак принимает различные значения для целей с разным числом БТ на их поверхности, а также для целей с одинаковым числом БТ, но с различными ЭПР и различным взаимным расположением БТ в радиальном направлении (фиг. 1, а, б).
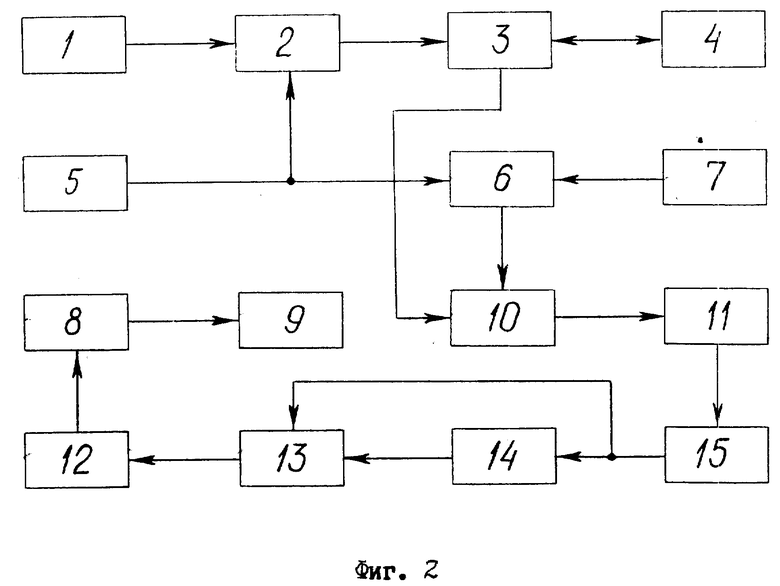
На фиг. 2 представлена структурная схема предлагаемого радиолокационного устройства распознавания сигналов.
Устройство содержит импульсный модулятор 1, усилитель мощности 2, антенный переключатель 3, антенну 4, задающий генератор 5, первый смеситель 6, гетеродин 7, интегратор 8, блок идентификации 9, второй смеситель 10, УПЧ 11, ДППВ 12, сумматор 13, ЛЗ 14, амплитудный детектор 15. При этом антенный переключатель 3, 2-й смеситель 10, УПЧ 11, амплитудный детектор 15, ЛЗ 14, сумматор 13, ДППВ 12, интегратор 8 и блок идентификации включены последовательно. Задающий генератор 5 связан своим выходом с 1-м входом 1-го смесителя 6 и 1-м входом усилителя мощности 2, второй вход которого связан с выходом импульсного модулятора 1, а выход со входом антенного переключателя 3, антенный вход которого связан с антенной 4. Выход гетеродина 7 соединен со 2-м входом 1-го смесителя 6, выход которого подключен ко 2-му входу 2-го смесителя 10, а выход амплитудного детектора 15 подключен также ко 2-му входу сумматора 13.
Радиолокационное устройство распознавания сигналов работает следующим образом.
Задающий генератор 5 генерирует сверхвысокочастотные гармонические колебания на частоте fо, которые поступают в усилитель мощности 2, где из непрерывного колебания вырабатываются прямоугольные СВЧ-импульсы в соответствии с законом модуляции, навязываемым импульсным модулятором 1. СВЧ-импульсы проходят антенный переключатель 3 и через антенну 4 излучаются в направлении цели. Отразившись от цели, импульсы с измененной структурой поступают в антенну 4 и через антенный переключатель 3 проходят на 1-й вход 2-го смесителя 10; на 2-й вход которого подаются выходные сигналы 1-го смесителя 6, который, в свою очередь, по сигналам промежуточной частоты fпр с выхода гетеродина 7 на 2-м входе и сигналам несущей частоты fо с выхода задающего генератора 5 на 1-м входе формирует опорный сигнал на частоте fо + fпр. Во втором смесителе 10 происходит смешивание сигналов на двух его входах, в результате чего на выходе смесителя 10 формируются амплитудно-модулированные сигналы от цели на разностной (промежуточной) частоте (fпр + fпр) fо fпр. Они усиливаются в УПЧ 11 и подаются на вход амплитудного детектора 15, где происходит выделение огибающий.
В соответствии с интерференцией ЭМВ от БТ для целей 1 и 2, радиальная структура которых показана на фиг. 1, а, б, на выходе амплитудного детектора 15 могут быть получены сигналы, представленные соответственно на фиг. 1, в, г (варианты). На представленных эпюрах отраженные сигналы имеют перепады амплитуд, положение которых на временной оси определяется положением БТ в структурах целей. Это связано с тем, что при изменении числа БТ, участвующих в отражении ЭМВ, изменяется интерференционная структура поля, и в зависимости от соотношения фаз и амплитуд сигналов, отразившихся от отдельных БТ, суммарный отраженный сигнал изменяет свою величину. Для выявления информации о величинах перепадов уровней отраженного сигнала в схеме применена ЛЗ 14, время задержки которой определяется минимально разрешаемым радиальным интервалом между соседними БТ на всех из назначенных для распознавания целей (на фиг. 1,а данный интервал обозначен Hмин). Сигналы, полученные для двух гипотетических целей на выходах ЛЗ 14, показаны на фиг. 1, д, е, где Tз время задержки сигналов в ЛЗ 14. Прямой и задержанный сигналы подаются соответственно на 2-й (инверсный) и 1-й входы сумматора 13. На 2-м входе сумматора предполагается наличие инвертора (на фиг. 2 не показан). Разностный сигнал с выхода сумматора 13 подается на ДППВ 12, где разнополярные сигналы выпрямляются и становятся однополярными (фиг. 1, ж, з). Далее сигналы поступают на интегратор 8, который производит их поочередное интегрирование с запоминанием результирующей амплитуды (фиг. 1, и, к). Как видно из приведенных эпюр, выходные напряжения U1 и U2 для 1-й и 2-й целей отличаются по амплитуде, так как последняя критична к числу и интенсивностям перепадов амплитуд в отраженном сигнале. Это позволяет распознавать цели различных классов (типов), сравнивая выходные сигналы интегратора 8 в блоке идентификации 9 с набором пороговых сигналов.
Метод распознавания, реализуемый с помощью предложенного радиолокационного устройства распознавания сигналов, позволяет использовать для распознавания целей простые узкополосные (квазимонохроматические) импульсные сигналы. Признак распознавания, сформированный устройством распознавания, является достаточно информативным, что позволяет по отраженным импульсным сигналам распознавать цели не только различных классов, но и различных типов в пределах одного класса, то есть целей с одинаковыми геометрическими размерами, что следует из анализа эпюр фиг. 1.
Литература
1. Небабин В.Г. Сергеев В.В. Методы и техника радиолокационного распознавания. -М. Радио и связь, 1984, с. 112 114, рис. 4.6 (аналог).
2. Небабин В.Г. Сергеев В.В. Методы и техника радиолокационного распознавания. -М. Радио и связь, 1984, с. 120 126, рис. 4.11 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1996 |
|
RU2096803C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ СОСТАВА ЦЕЛИ | 1996 |
|
RU2095827C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ЦЕЛЕЙ | 1996 |
|
RU2099736C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ | 1996 |
|
RU2097782C1 |
| РЛС РАСПОЗНАВАНИЯ ЦЕЛЕЙ | 1996 |
|
RU2095825C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ ДВУХЧАСТОТНЫМ СПОСОБОМ | 1996 |
|
RU2114443C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 1995 |
|
RU2095822C1 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ ЦЕЛЕЙ НА ФОНЕ ПОМЕХ | 1998 |
|
RU2139552C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ | 1995 |
|
RU2099744C1 |
| РАДИОЛОКАЦИОННОЕ РАСПОЗНАЮЩЕЕ УСТРОЙСТВО | 1996 |
|
RU2095824C1 |
Изобретение относится к радиолокации и может быть использовано для распознавания классов воздушных целей. Целью изобретения является повышение достоверности радиолокационного распознавания воздушных целей за счет идентификации сигналов, отраженных данными целями, при использовании квазимонохроматического импульсного зондирования. Для достижения сформулированной цели в состав известного устройства распознавания предлагается дополнительно включить импульсный модулятор, усилитель мощности, задающий генератор, второй смеситель, последовательно соединенные линию задержки, сумматор, двухполупериодный выпрямитель, интегратор и блок идентификации с одновременным изменением некоторых межблочных связей. Предложенное построение схемы устройства позволяет повысить эффективность распознавания за счет оценки величин и количества перепадов уровней отраженного сигнала в пределах одного импульса. Использование нового признака распознавания может позволить распознавать типы целей (одинакового размера, но разной конфигурации) в пределах одного класса. 2 ил.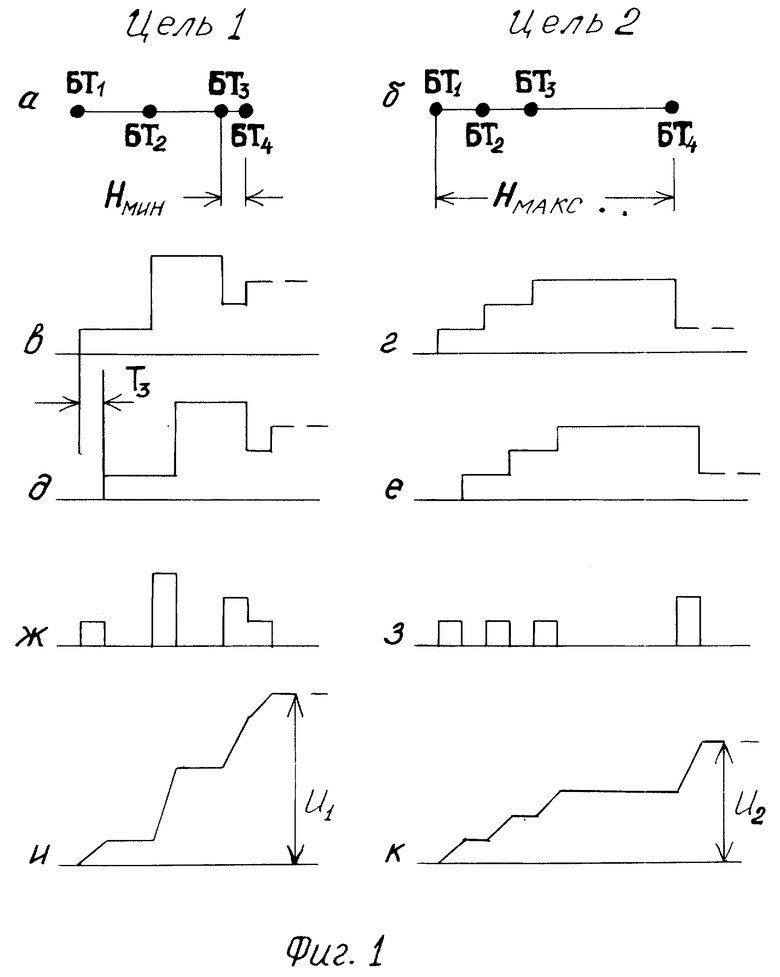
Радиолокационное устройство распознавания сигналов, содержащее амплитудный детектор, усилитель промежуточной частоты, гетеродин, первый смеситель, антенный переключатель и антенну, причем антенна связана с антенным входом антенного переключателя, а гетеродин соединен с вторым входом первого смесителя, отличающееся тем, что в состав устройства дополнительно включены импульсный модулятор, усилитель мощности, задающий генератор, второй смеситель, последовательно соединенные линия задержки, сумматор, двухполупериодный выпрямитель, интегратор и блок идентификации, причем выход задающего генератора связан с первым входом первого смесителя и первым входом усилителя мощности, второй вход которого связан с выходом импульсного модулятора, а выход с входом антенного переключателя, выход которого соединен с первым входом второго смесителя, второй вход которого подключен к выходу первого смесителя, а выход к входу усилителя промежуточной частоты, выход которого связан с входом амплитудного детектора, выход которого соединен с входом линии задержки и вторым инверсным входом сумматора.
| Небабин В.Г., Сергеев В.В | |||
| Методы и техника радиолокационного распознавания | |||
| - М.: Радио и связь, 1984, с.112 - 114, 120 - 126 рис.4 | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
