Изобретение относится к радиолокационным устройствам и может быть использовано для распознавания воздушных целей с помощью радиолокатора, использующего двухчастотный узкополосный зондирующий сигнал.
Известно устройство распознавания воздушных целей двухчастотным способом [1] , содержащее 1-й и 2-й передатчики, 1-ю и 2-ю передающие антенны, 1-й и 2-й логарифмические приемники, 1-ю и 2-ю приемные антенны, блок вычисления разности частот, пороговое устройство, блок схем совпадения, блок эталонов и индикатор. При этом выход 1-го передатчика соединен с входом 1-й передающей антенны, выход 2-го передатчика соединен с входом 2-й передающей антенны, выход 1-й приемной антенны подключен к входу 1-го логарифмического приемника, выход 2-й приемной антенны подключен к входу 2-го логарифмического приемника, выход которого соединен с 2-м входом блока вычисления разности частот, 1-й вход которого соединен с выходом 1-го логарифмического приемника, а выход - с 1-м входом блока схем совпадения, 2-й вход которого соединен с выходом блока эталонов, a N выходов подключены к соответствующим из N входов индикатора.
Данное устройство позволяет определять поперечные размеры целей и распознавать их по различию амплитуд двух сигналов, отраженных на разных частотах. Достоинством данного устройства является высокое быстродействие.
Однако вероятность правильного распознавания целей данным устройством будет невелика, так как поперечные размеры целей зависят от ракурса локации, что не учитывается при ведении распознавания. Кроме того, данное устройство требует наличия четырех антенн, двух приемников и двух передатчиков, что повышает его дороговизну и громоздкость, а также ведет к затруднениям при технической реализации, так как возникает необходимость обеспечения абсолютной идентичности двух каналов.
Известно также устройство распознавания целей двухчастотным способом [2] , состоящее из импульсного модулятора (ИМ), 1-го умножителя частоты, 2-го усилителя мощности (УМ), приемника сигналов частоты nf, последовательно соединенных приемника сигналов частоты f, 2-го умножителя частоты, фазового детектора и индикатора, последовательно включенных задающего генератора (ЗГ), 1-го УМ, сумматора, антенного переключателя (АП) и антенны. При этом 1-й выход ИМ соединен с 2-м входом 1-го УМ, а второй - с 2-м входом 2-го УМ, 1-й вход которого соединен с выходом 1-го умножителя частоты, вход которого подключен к выходу ЗГ. Выход 2-го УМ подключен к 2-му входу сумматора, а выход АП соединен одновременно с входом приемника сигналов частоты f и входом приемника сигналов частоты nf, выход которого соединен с 2-м входом фазового детектора.
Данное устройство позволяет селектировать воздушные цели на фоне отражений от местных предметов и распознавать цели разных размеров между собой. Работа устройства основана на измерении фазовых сдвигов сигналов, отраженных воздушными целями на двух кратных частотах. За счет использования кратных частот информация о фазовых сдвигах сигналов, обусловленная отражениями от целей, отделяется от фазовых сдвигов, происходящих за счет изменения расстояния до цели или ракурса ее пеленга.
Однако данное устройство не может распознавать цели с высокой вероятностью, так как величина фазового сдвига при отражении от цели определяется не только геометрическим размером цели, но и ее ракурсом, материалом изготовления, применением конкретного вида подвесного оборудования и т.д. К тому же, данное устройство позволяет распознавать цели всего двух типоразмеров, к которым жестко привязываются длины волн сигналов двух зондирующих частот, так как устройство использует области резонансного и релеевского рассеяния.
Цель изобретения - повышение вероятности распознавания воздушных целей за счет повышения точности измерения радиального размера при использовании узкополосных сигналов на двух зондирующих частотах.
Цель достигается тем, что диапазон зондирования переводится в область квазиоптического рассеяния и в известное устройство распознавания [2] дополнительно вводят четыре смесителя, два гетеродина, коммутатор, два амплитудных детектора (АД), два квадратора, линию задержки (ЛЗ), усилитель высокой частоты (УВЧ), блок сложения сигналов, два усилителя промежуточной частоты (УПЧ), делитель частоты, делитель, два интегратора, два блока измерения наибольшей амплитуды сигнала (БИНАС) и блок идентификации (БИ). При этом выход ЗГ соединяют с 1-м входом 1-го смесителя и 1-м входом 2-го смесителя, выход 1-го гетеродина подключают ко 2-му входу 4-го смесителя и 2-му входу 1-го смесителя, выход которого подключают к 1-му входу коммутатора, 2-й вход которого соединяют с выходом 2-го смесителя, 2-й вход которого соединяют с выходом 2-го гетеродина и 2-м входом 3-го смесителя, 1-й вход которого подключают к 1-му входу 4-го смесителя и выходу УВЧ, вход которого подключают к выходу АП, вход которого соединяют с выходом УМ, 1-й вход которого подключают к выходу коммутатора. При этом 3-й смеситель, 1-й УПЧ, блок сложения сигналов, 1-й АД, 1-й квадратор, 1-й БИНАС и 1-й интегратор соединяют последовательно. Также последовательно включают 4-й смеситель, 2-й УПЧ, 2-й АД, 2-й квадратор, 2-й БИНАС и 2-й интегратор. Кроме того, выход 2-го УПЧ соединяют с входом ЛЗ, выход которой подключают к 2-му входу блока сложения сигналов, а выход ИМ соединяют с входом делителя частоты, выход которого подключают к 2-му входу 1-го интегратора и 2-му входу 2-го интегратора, выход которого подключают к 2-му входу делителя, 1-й вход которого соединяют с выходом 1-го интегратора, а выход - с входом БИ.
Предлагаемое построение схемы устройства наделяет его новыми свойствами, позволяющими более точно определять протяженность радиолокационной цели вдоль линии визирования, то есть измерять радиальный размер цели. Повышение точности является следствием особенностей формирования отраженного сигнала в квазиоптической области рассеяния радиоволн. Для высокочастотной области рассеяния характерно, что величина эффективной площади рассеяния (ЭПР) каждого элементарного отражателя (блестящей точки) одинакова для всех спектральных составляющих при выполнении следующего условия: Δf < f0, где Δf - ширина спектра зондирующего сигнала, f0 - несущая частота. Под блестящими точками (БТ) понимают локальные отражатели, обусловленные наличием областей "зеркального" отражения (первой зоны Френеля), а также отражатели, локализованные на геометрических неоднородностях поверхности цели (краевой эффект). При наличии в составе воздушного объекта ретранслятора последний рассматривается как локальный излучатель, пространственное положение которого совпадает с положением антенны ответчика.
При этом следует отметить, что глубина 1-й зоны Френеля составляет четверть длины волны зондирующего сигнала [3, с. 138], т.е. чем меньше длина волны, тем меньше геометрический размер БТ, а значит расстояние между БТ можно измерять с большей точностью. Достоинства предложенного устройства наиболее ярко проявляются при распознавании малоразмерных целей, которые в метровом диапазоне представляют собой одну БТ с нулевым радиальным размером. В сантиметровом же диапазоне малоразмерные цели отличаются по своим радиальным размерам и их можно классифицировать по типам.
В сантиметровом диапазоне длин волн достаточно полным приближением реальных свойств цели по формированию отраженного сигнала является модель, предлагаемая в [4] и показанная на фиг. 1. Модель отвечает основным требованиям, предъявляемым к таким моделям (в достаточной мере обеспечивает отражение сущности происходящих при радиолокации протяженных целей физических процессов и явлений, а также эквивалентность получаемых при ее анализе характеристик практическим результатам), и является достаточно наглядной.
На фиг. 1 : σi - ЭПР i-й БТ; ΔZi - расстояние вдоль линии визирования РЛС от i-й БТ до кажущегося центра (КЦ) цели; Δri - расстояние от ближайшей к РЛС БТ до i-й БТ; ρ - смещение КЦ цели относительно ее геометрического центра; R0 - расстояние от РЛС до КЦ цели, L - расстояние между крайними БТ вдоль линии визирования цели, т.е. радиальный размер цели.
Исходя из свойств данной модели [4] можно заключить, что она демонстрирует возможности измерения радиального размера целей с точностью до единиц сантиметров, что недоступно в резонансной и релеевской областях рассеяния.
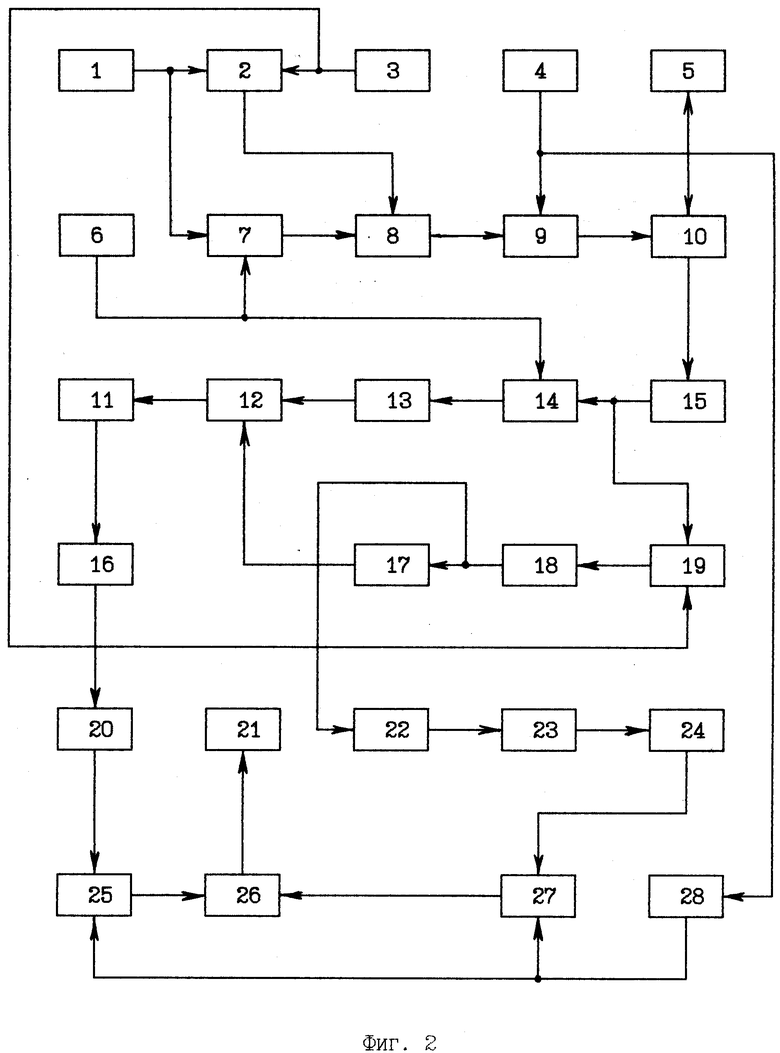
На фиг. 2 представлена структурная схема устройства распознавания целей двухчастотным способом.
Устройство содержит ЗГ 1, 1-й смеситель 2, 1-й гетеродин 3, ИM 4, антенну 5, 2-й гетеродин 6, 2-й смеситель 7, коммутатор 8, УМ 9, АП 10, 1-й АД 11, блок сложения сигналов 12, 1-й УПЧ 13, 3-й смеситель 14, УВЧ 15, 1-й квадратор 16, ЛЗ 17, 2-й УПЧ 18, 4-й смеситель 19, 1-й БИНАС 20, БИ 21, 2-й АД 22, 2-й квадратор 23, 2-й БИНАС 24, 1-й интегратор 25, делитель 26, 2-й интегратор 27 и делитель частоты 28. При этом ЗГ 1 соединен своим выходом с 1-м входом 1-го смесителя 2 и 1-м входом 2-го смесителя 7, 2-й вход которого подключен к выходу 2-го гетеродина 6 и 2-му входу 3-го смесителя 14. Выход 1-го гетеродина 3 соединен с 2-м входом 4-го смесителя 19 и с 2-м входом 1-го смесителя 2, выход которого подключен к 1-му входу коммутатора 8, 2-й вход которого соединен с выходом 2-го смесителя 7, а выход - с 1-м входом УМ 9, 2-й вход которого соединен с выходом ИМ 4 и входом делителя частоты 28, а выход - с входом АП 10, вход-выход которого связан с вход-выходом антенны 5, а выход - с входом УВЧ 15. При этом имеют последовательное включение УВЧ 15, 3-й смеситель 14, 1-й УПЧ 13, блок сложения сигналов 12, 1-й АД 11, 1-й квадратор 16, 1-й БИНАС 20 и 1-й интегратор 25. Последовательно соединены в устройстве распознавания 4-й смеситель 19, 2-й УПЧ 18, 2-й АД 22, 2-й квадратор 23, 2-й БИНАС 24 и 2-й интегратор 27. Выход УПЧ 18 соединен также с входом ЛЗ 17, выход которой подключен к 2-му входу блока сложения сигналов 12. Выход УВЧ 15 соединен также с 1-м входом 4-го смесителя, а выход делителя частоты 28 соединен с 2-м входом 2-го интегратора 27 и 2-м входом 1-го интегратора 25, выход которого подключен к 1-му входу делителя 26, 2-й вход которого соединен с выходом 2-го интегратора 27, а выход - с входом БИ 21.
Устройство распознавания работает следующим образом.
ЗГ 1 генерирует непрерывные высокочастотные колебания с частотой fп, которые подаются на первые входы 1-го и 2-го смесителей 2 и 7. На вторые входы 1-го и 2-го смесителей 2 и 7 поступают соответственно сигналы на частоте f1г c выхода 1-го гетеродина 3 и на частоте f2г с выхода 2-го гетеродина 6, отличающиеся по частоте на величину Δf = f1г - f2г. Разнос частот Δf составляет величину порядка единиц МГц. Сигнал с выхода 1-го смесителя 2 поступает на 1-й вход коммутатора 8, на 2-й вход которого поступает сигнал с выхода 2-го смесителя 7. Коммутатор 8 служит для того, чтобы пропускать со своего выхода на 1-й вход УМ 9 сигналы 1-го смесителя 2 в четные периоды зондирования, а сигналы 2-го смесителя 7 - в нечетные периоды зондирования. Сигналы с выхода коммутатора 8 поступают на 1-й вход УМ 9 и в моменты наличия на 2-м входе УМ 9 модулирующих импульсов (с выхода ИМ 4) усиливаются по мощности, после чего через АП 10 подаются на антенну 5 и излучаются ею в направлении воздушной цели. В результате в четные периоды зондирования цель будет облучаться сигналами на частоте fп + f1г, а в нечетные - соответственно сигналами на частоте fп + f2г=fп + f1г- Δf.
Отраженные целью сигналы принимаются антенной 5 и через АП 10 поступают на вход УВЧ 15, полоса пропускания которого позволяет проводить обработку сигналов 2-х частот зондирования. С выхода УВЧ 15 сигналы поступают на 1-е входы 3-го и 4-го смесителей 14 и 19. На 2-й вход 3-го смесителя 14 поступает сигнал с выхода 2-го гетеродина 6. На 2-й вход 4-го смесителя 19 поступает сигнал с выхода 1-го гетеродина 3. На выходе 3-го и 4-го смесителей 14 и 19 формируется сигнал на частоте, равной разности частот сигналов, поступивших на 1-й и 2-й входы определенного смесителя. Выходной сигнал 3-го смесителя 14 поступает на вход 1-го УПЧ 13, а выходной сигнал 4-го смесителя 19 - на вход 2-го УПЧ 18. Блоки 13 и 18 являются идентичными и настроенными на частоту fп. Таким образом, на выходе 1-го УПЧ 13 будет присутствовать отраженный от цели сигнал только в нечетные периоды приема, а на выходе 2-го УПЧ 18 - только в четные периоды, поскольку только в этих периодах на выходе соответствующих смесителей будут иметь место сигналы на частоте fп.
Усиленный в 1-м УПЧ 13 сигнал поступает на 1-й вход блока сложения сигналов 12, на 2-й вход которого поступает усиленный вторым УПЧ 18 сигнал через ЛЗ 17, время задержки которой равно длительности периода следования зондирующих импульсов.
Кроме того, сигнал с выхода 2-го УПЧ 18 подается на вход 2-го АД 22, где выделяется его огибающая. С выхода 2-го АД 22 сигнал поступает на вход 2-го квадратора 23, на выходе которого формируется сигнал, значение которого изменяется пропорционально квадрату амплитуды огибающей сигнала, принятого на частоте fп + f1г. Данный сигнал поступает на вход 2-го БИНАС 24, в котором производится анализ сигнала и измеряется его наибольшее значение, величина которого определяет уровень сигнала, поступающего на выход блока 24 и далее - на 1-й вход 2-го интегратора 27.
Аналогичные операции производятся с выходным сигналом блока сложения сигналов 12, так как данный сигнал проходит через идентичные блоки, а именно - через 1-й АД 11, 1-й квадратор 16, 1-й БИНАС 20, поступая далее на 1-й вход 1-го интегратора 25.
Первый и второй интеграторы 25 и 27 предназначены для интегрирования сигналов, поступающих на их первые входы в течение некоторого промежутка времени Tу усреднения. Иначе говоря, интеграторы усредняют информацию, поступающую на их первые входы за время Tу. Время усреднения Tу выбирается из условия обеспечения анализа информации, заключенной в полном лепестке диаграммы обратного рассеяния (ДОР) цели наименьших размеров, то есть обеспечения анализа наибольшего из возможных по ширине лепестков ДОР. Как известно [3, с. 20] , ширина лепестка ДОР в градусах или радианах определяется линейными размерами цели. Для сантиметрового диапазона длин волн согласно [5] ширина лепестков ДОР реальных целей составляет величину θ = 0,05-0,1o. Максимальная угловая скорость изменения ракурса ωp, связанная с наличием и уровнем траекторных нестабильностей полета целей, может достигать в турбулентных слоях атмосферы единиц градусов в секунду [5, 6]. Таким образом, время Tу можно оценить по формуле
Tу= θмакс/ωpмин= 0,1/1 = 0,1 c.
Исходя из значения продолжительности одного цикла распознавания, приблизительно равного Tу, следует выбирать коэффициент деления частоты для делителя частоты 28 в интересах правильного формирования импульса сброса интеграторов 25 и 27. Данный коэффициент деления Кд может быть рассчитан по формуле Кд = Ту/Ти, где Ти - период повторения импульсов в ИМ 4. При правильном выборе Кд импульсные сигналы с выхода ИМ 4, пройдя делитель частоты 28, будут поступать с его выхода на вторые входы 1-го и 2-го интеграторов 25 и 27 через промежутки времени Ту, т.е. будут обеспечивать усреднение сигналов, поступающих на интеграторы 25 и 27 за интервал Ту в пределах одного или более лепестков ДОР цели.
Наиболее полно сигнал на выходе 1-го интегратора может быть описан в форме параметра рассеяния и приема W(K) [4]. Обобщенный параметр рассеяния и приема описывает отражающие свойства цели в максимуме отклика фильтра, согласованного со спектром зондирующего сигнала, учитывая результат накопления рассеянного сигнала в приемнике. В дальнейшем при проведении анализа будем рассматривать амплитуду принятого сигнала на выходе устройства обработки, проводящего операцию вычисления квадрата модуля суммы спектральных составляющих отраженного двухчастотного зондирующего сигнала, которая описывается выражением
где S(jω) - спектральная плотность зондирующего сигнала;
Q - нормирующий коэффициент, производящий нормировку спектральной плотности зондирующего сигнала;
K(jω) - нормированная частотная характеристика цели;
ω - круговая частота.
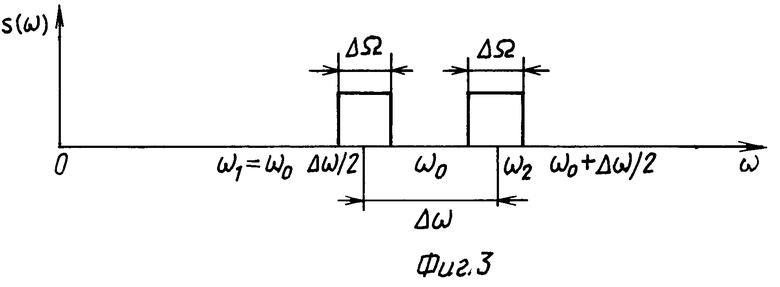
Получим выражение, описывающее величину отклика устройства, которое вычисляет квадрат модуля суммы на составляющих двухчастотного сигнала, рассеянного сложной радиолокационной целью (фиг. 1), форма спектра которого показана на фиг. 3.
Нормированную спектральную плотность такого сигнала запишем в следующем виде:
где ΔΩ - эффективная ширина спектра одной из составляющих двухчастотного зондирующего сигнала;
ωo - средняя частота двухчастотного зондирующего сигнала;
Δω - разнос частот двухчастотного зондирующего сигнала.
На основании выражения для нормированной частотной характеристики цели из [4] с помощью (1), получим
где A - количество БТ в составе цели; c - скорость света; ν - относительное (безразмерное) смещение КЦ цели.
Используя свойство свертки спектров, методом интегрального исчисления имеем
Раскрывая квадрат модуля, получим
Учитывая условие узкополосности сигнала, имеем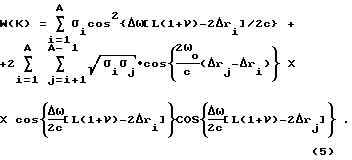
Средняя амплитуда отклика сигнала на выходе 1-го интегратора будет пропорциональна величине
Причем выражение (6) совпадает с известным соотношением, описывающим величину средней ЭПР, при облучении цели монохроматическим сигналом ( Δω = 0 и ΔΩ = 0 ), а также при облучении двухчастотным зондирующим сигналом точечной цели.
Из сравнения выражения (6) с известным описанием средней ЭПР цели следует, что если облучать цель двухчастотным сигналом с разносом частот Δω , а отраженный сигнал принимать двухканальным приемным устройством, один из каналов которого принимает обе спектральные составляющие зондирующего сигнала, а второй - только одну, то проводя сравнение амплитуд рассеянных сигналов с выходов этих каналов, можно классифицировать цели по их радиальной протяженности потому, что средняя амплитуда сигнала на выходе узкополосного приемного канала будет пропорциональна ЭПР цели, а на выходе второго - параметру рассеяния и приема W(K), значение которого зависит от соотношения разноса частот двухполосного зондирующего сигнала и радиального размера цели.
Из вышеуказанного следует, что в качестве признака распознавания в предложенном устройстве целесообразно использовать отношение мощностей отраженных сигналов, измеряемых на выходах двухканального приемного устройства (фиг. 2).
С выхода 1-го интегратора 25 усредненный сигнал поступает на 1-й вход делителя 26, на 2-й вход которого подается усредненный сигнал с выхода 2-го интегратора 27. Делитель 26 формирует на своем выходе сигнал, равный частному от деления сигнала на 1-м входе на сигнал на 2-м входе, т.е. равный отношению среднего значения параметра рассеяния к средней ЭПР цели, который поступает на вход БИ 21.
Блок идентификации 21 представляет собой устройство, структурно состоящее из блока хранения порогов, запоминающего устройства, схемы сравнения и табло вывода результатов (на чертеже не показаны). Сигнал с выхода делителя 26 поступает на вход запоминающего устройства, которое подает входной сигнал на 1-й вход схемы сравнения в течение промежутка времени, необходимого для сравнения входного сигнала с набором пороговых сигналов, поступающих поочередно на 2-й вход схемы сравнения. При превышении сигналом запоминающего устройства очередного порога (пороги подаются в порядке убывания) на выход схемы сравнения проходит сигнал, пропорциональный уровню порога. Этот сигнал отключает от схемы сравнения блок хранения порогов и обнуляет выход запоминающего устройства до начала следующего цикла распознавания. Кроме того, этот сигнал поступает на табло вывода результатов, в котором в соответствии с уровнем входного сигнала загорается индикатор (светодиод, лампа) распознанного класса (типа) воздушной цели.
Использование перепада средних амплитуд на выходе 1-го и 2-го интеграторов  в качестве признака классификации воздушных целей позволяет по результатам его анализа производить более точную чем в прототипе оценку их радиальной протяженности.
в качестве признака классификации воздушных целей позволяет по результатам его анализа производить более точную чем в прототипе оценку их радиальной протяженности.
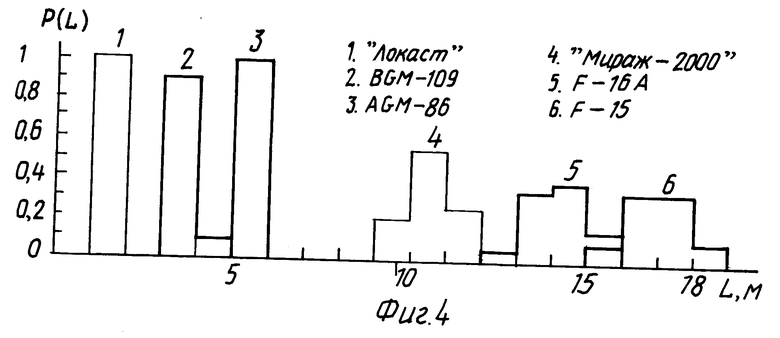
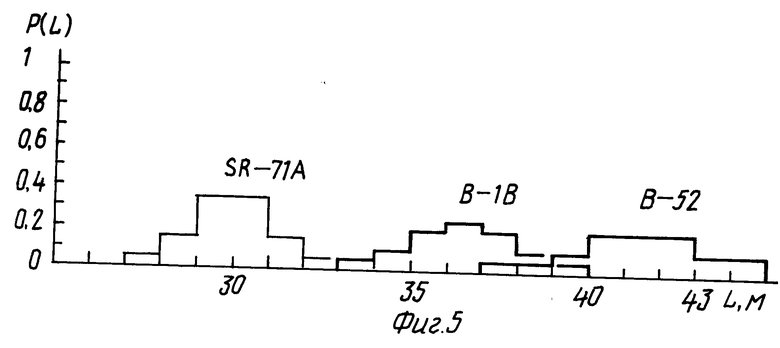
Проверка работоспособности предлагаемого устройства и качества его работы проводилась методом математического моделирования. При этом отраженные сигналы целей различных классов (типов) представляли собой суперпозицию отражений от тел простой геометрической формы, которыми аппроксимировались сложные поверхности летательных аппаратов. Для расчета отражательных свойств тел простой формы использовались известные выражения [7, 8 и 9]. Для разыгрывания задачи распознавания были рассчитаны отраженные сигналы следующих целей: "Локаст", BGM-109, AGM-86, "Мираж-2000", F-16A, F-15, SR-71A, В-1В, В-52. Эти сигналы зависели от ракурса локации, дальности до цели, величин угловых скоростей рыскания, тангажа и крена. Статистические данные оценок измерения радиального размера целей по предложенному признаку распознавания набирались для 9 типов целей, находящихся на дальностях от 15 до 60 км, на ракурсах локации по азимуту от 0 до 35o, по углу места - от 10 до 40o при величинах траекторных нестабильностей полета целей, достигающих 2o/с. Длина волны зондирующих сигналов составляла 4 см, а разнос частот двухчастотного узкополосного зондирующего сигнала был выбран 2,5 МГц. Для каждого типа цели проделывалось не менее 800 опытов. Результаты статистического усреднения измеренных предложенным устройством радиальных размеров 9 типов целей представлены в графическом виде (в виде гистограмм) на фиг. 4 и 5. Из анализа данных гистограмм следует, что цели указанных типов можно распознавать с высокой вероятностью, определив уровни порогов между гистограммами оценок радиальных размеров целей по одному из известных критериев (например, Неймана-Пирсона).
Как видно, предлагаемое устройство позволяет распознавать цели малых размеров ("Локаст", BGM-109, AGM-86) между собой, чего нельзя сказать о прототипе. К тому же число распознаваемых классов здесь может быть больше 2-х, среднеразмерные ("Мираж-200", F-16A, F-15) и крупноразмерные (SR-71A, B-1B, В-52) цели могут распознаваться до типов, а средняя вероятность распознавания целей разработанным устройством выше, чем у прототипа, что определяется прежде всего повышенной точностью измерения радиального размера.
Литература
1. Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного распознавания.- М.: Радио и связь, 1984, с.102, фиг. 3.35 (аналог).
2. Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного распознавания. - М.: Радио и связь, 1984, с.75, фиг. 3.19 (прототип).
3. Финкельштейн М.И. Основы радиолокации. Учебник для вузов. - 2-е изд. перераб. и доп. - М.: Радио и связь, 1983, 536 с., ил.
4. Бондарев Л. А. Отражающие свойства моделей сложных радиолокационных целей. Радиотехника, 1990, N 7, с.8-13.
5. Вишин Г.M. Многочастотная радиолокация. - М.: Воениздат, 1973, 92 с.
6. Справочник по радиолокации./ Под ред. М.И. Сколника. - М.: Советское радио, 1976, т.1, 455 с.
7. Кобак В.О. Радиолокационные отражатели. -М.: Советское радио. 1975, 248 с.
8. Криспин мл. , Маффетт. Оценка радиолокационного поперечного сечения тел простой формы. ТИИЭР, 1965, т.53, N 8, с. 960 - 975.
9. Майзельс Е.Н., Торгованов В.А. Измерение характеристик рассеяния радиолокационных целей. - М.: Советское радио, 1972, 232 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ СИГНАЛОВ | 1996 |
|
RU2095826C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ | 1996 |
|
RU2097782C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1996 |
|
RU2096803C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ СОСТАВА ЦЕЛИ | 1996 |
|
RU2095827C1 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ ЦЕЛЕЙ НА ФОНЕ ПОМЕХ | 1998 |
|
RU2139552C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 1995 |
|
RU2095822C1 |
| РЛС РАСПОЗНАВАНИЯ ЦЕЛЕЙ | 1996 |
|
RU2095825C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ЦЕЛЕЙ | 1996 |
|
RU2099736C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1995 |
|
RU2079857C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ ИСКУССТВЕННЫХ ЦЕЛЕЙ | 1995 |
|
RU2079856C1 |
Изобретение относится к радиолокационным устройствам и может быть использовано для распознавания воздушных целей с помощью радиолокатора, использующего двухчастотный узкополосный зондирующий сигнал. Целью изобретения является повышение вероятности распознавания воздушных целей при использовании узкополосных сигналов двух зондирующих частот. Цель достигается тем, что диапазон зондирования переводится в область квазиоптического рассеяния и в известное устройство распознавания дополнительно вводят четыре смесителя, два гетеродина, коммутатор, два амплитудных детектора, блок сложения сигналов, два квадратора, линию задержки, усилитель высокой частоты, два усилителя промежуточной частоты, делитель частоты, делитель, два интегратора, два блока измерения наибольшей амплитуды сигнала и блок идентификации, изменяя соответствующим образом межблочные связи. За счет этого повышается точность измерения радиальных размеров целей, что положительным образом сказывается на результатах их радиолокационного распознавания, а именно появляется возможность распознавать цели до типов в пределах одного класса. 5 ил.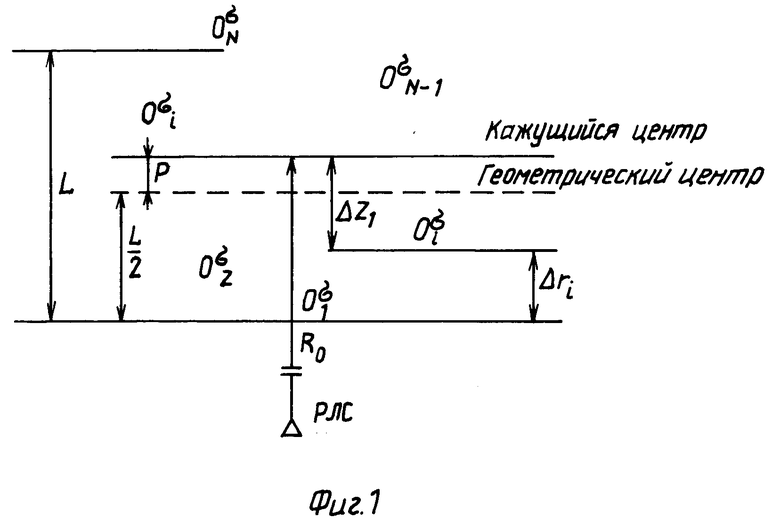
Устройство распознавания воздушных целей двухчастотным способом, содержащее задающий генератор, импульсный модулятор, соединенный с его выходом своим вторым входом усилитель мощности, антенну и соединенный с ее вход-выходом своим вход-выходом антенный переключатель, отличающееся тем, что дополнительно введены первый смеситель, первый гетеродин, второй гетеродин, второй смеситель, коммутатор, линия задержки, делитель, делитель частоты, блок идентификации, последовательно включенные усилитель высокой частоты, третий смеситель, первый усилитель промежуточной частоты, блок сложения сигналов, первый амплитудный детектор, первый квадратор, первый блок измерения наибольшей амплитуды сигнала, первый интегратор, последовательно соединенные четвертый смеситель, второй усилитель промежуточной частоты, второй амплитудный детектор, второй квадратор, второй блок измерения наибольшей амплитуды сигнала и второй интегратор, причем выход задающего генератора соединен с первым входом первого смесителя и первым входом второго смесителя, второй вход которого соединен с выходом второго гетеродина и вторым входом третьего смесителя, первый вход которого подключен также к первому входу четвертого смесителя, второй вход которого соединен с выходом первого гетеродина и вторым входом первого смесителя, выход которого соединен с первым входом коммутатора, второй вход которого подключен к выходу второго смесителя, а выход - к первому входу усилителя мощности, выход которого соединен со входом антенного переключателя, а второй вход - со входом делителя частоты, выход которого соединен со вторым входом второго интегратора и вторым входом первого интегратора, выход которого подключен к первому входу делителя, второй вход которого соединен с выходом второго интегратора, а выход - со входом блока идентификации, выход антенного переключателя соединен со входом усилителя высокой частоты, а выход второго усилителя промежуточной частоты соединен со входом линии задержки, выход которой подключен ко второму входу блока сложения сигналов.
| Небабин В.Г., Сергеев В.В | |||
| Методы и техника радиолокационного распознаван ия | |||
| - М.: Радио и связь, 1984, с | |||
| Фальцовая черепица | 0 |
|
SU75A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
