Изобретение относится к радиолокационной технике и может быть использовано в импульсных РЛС с простыми узкополосными зондирующими сигналами в квазиоптической области отражения радиоволн для распознавания (определения) количества одиночных целей, находящихся в неразрешаемом импульсном объеме РЛС.
Известно радиолокационное устройство распознавания целей [1] состоящее из индикатора и приемопередатчика, содержащего генератор, импульсный модулятор, усилитель мощности, антенный переключатель, антенну, первый и второй смесители, гетеродин, усилитель промежуточной частоты и фазовый детектор. При этом гетеродин, смесители, усилитель промежуточной частоты и фазовый детектор входят в состав приемника, генератор соединен своим выходом с первым входом первого смесителя и первым входом усилителя мощности, выход которого соединен с антенной через антенный переключатель, выход которого соединен с 1-м входом 2-го смесителя, второй вход которого соединен с выходом первого смесителя, а выход связан с входом усилителя промежуточной частоты, выход которого подключен ко второму входу фазового детектора, выход которого соединен с индикатором, а первый вход соединен с гетеродином, который также соединен с вторым входом первого смесителя, и, кроме того, выход импульсного модулятора соединен со вторым входом усилителя мощности.
Это устройство обеспечивает обнаружение воздушных целей на фоне подстилающей поверхности, а также их распознавание на основе эффекта Доплера. Однако указанное устройство не способно обнаруживать неподвижные или малоподвижные цели на фоне местных предметов и распознавать цели, имеющие одинаковые радиальные составляющие вектора скорости. Данное устройство не может быть использовано для распознавания состава групповой цели или установления самого факта, что цель является групповой.
Известно также устройство радиолокационного распознавания целей по амплитудной модуляции отраженных эхо-сигналов [2] Принцип действия устройства основан на том, что отражающие поверхности конструкций летательных аппаратов при своем нормальном функционировании совершают колебательные движения, обусловленные работой двигателей. Эти колебания воздействуют на зондирующие импульсы РЛС, и фаза рассеянных сигналов изменяется в соответствии с частотами колебаний элементов конструкции распознаваемого объекта. Устройство включает антенну, антенный переключатель, приемник, передатчик, индикатор кругового обзора и канал распознавания, состоящий из регулируемой линии задержки (ЛЗ), 2-го ключа, смесителя, фильтра нижних частот (ФНЧ) и устройства воспроизведения образа цели, причем передатчик состоит из импульсного модулятора, генератора высокой частоты (ГВЧ) и 1-го ключа. В описанном устройстве антенна через антенный переключатель соединяется со входом приемника и выходом 1-го ключа, 2-й вход которого соединен одновременно с выходом ГВЧ и 2-м входом смесителя, выход которого подключен ко входу ФНЧ, а 1-й вход к выходу 2-го ключа, 1-й вход которого соединен одновременно с выходом приемника и 2-м входом индикатора кругового обзора, 1-й вход которого соединен одновременно с выходом импульсного модулятора, 1-м (управляющим) входом 1-го ключа и входом регулируемой ЛЗ, выход которой подключен ко 2-му (управляющему) входу 2-го ключа, а устройство воспроизведения образа цели соединено с выходом ФНЧ.
Недостатком данного устройства является то, что оно не может обеспечить высокую вероятность распознавания воздушных объектов, так как оно проводится с помощью головных телефонов по окраске звука, зависящей от амплитуды и частоты вибраций элементов конструкции целей. Отсутствие точных звуковых эталонов и различные слуховые и идентификационные возможности операторов РЛС, производящих распознавание, служат причинами возможных ошибок. Если в качестве признака распознавания применить не тембр звука, а распределение спектральных откликов по частотам вибрационного диапазона, то и в этом случае вероятность распознавания будет невысока, так как в данном устройстве производится не слежение за объектом, а только стробирование по дальности, что может привести к попаданию в рабочую дистанцию сигналов нескольких целей из состава групповой цели, причем данное устройство не способно распознавать состав групповой цели.
Целью изобретения является обеспечение возможности определять факт наличия групповой цели, а также распознавать количественный состав групповой цели.
Для достижения поставленной цели в состав известного устройства [2] дополнительно включают усилитель мощности, блок расширения строб-импульсов, гетеродин, последовательно включенные счетчик и индикатор, последовательно соединенные усилитель промежуточной частоты (УПЧ), амплитудный детектор, 1-ю дифференцирующую цепь (ДЦ), двухполупериодный выпрямитель (ДППВ), детектор огибающей (ДОГ), 2-ю ДЦ и диод. При этом импульсный модулятор подключают ко входу блока расширения строб-импульсов, 1-му входу усилителя мощности и 1-му входу счетчика, 2-й вход которого подключают к выходу ключа, 1-й вход которого соединяют с выходом диода, а 2-й с выходом регулируемой линии задержки, вход которой соединяют с выходом блока расширения строб-импульсов. Выход ГВЧ соединяют со 2-м входом усилителя мощности, выход которого соединяют со входом антенного переключателя, выход которого подключают к 1-му входу смесителя, 2-й вход которого соединяют с выходом гетеродина, а выход со входом УПЧ.
Предложенное построение схемы позволяет за счет анализа перепадов уровня сигнала в пределах одного отраженного импульса отличать групповую цель от одиночной и распознавать состав групповой цели.
На фиг. 1 представлена структурная схема радиолокационного устройства распознавания состава цели.
Устройство содержит импульсный модулятор 1, усилитель мощности 2, антенный переключатель 3, антенну 4, блок расширения строб-импульсов 5, ГВЧ 6, смеситель 7, гетеродин 8, регулируемую ЛЗ 9, 1-ю ДЦ 10, амплитудный детектор 11, УПЧ 12, ключ 13, счетчик 14, ДППВ 15, ДОГ 16, 2-ю ДЦ 17, диод 18, индикатор 19. При этом импульсный модулятор 1, усилитель мощности 2, антенный переключатель 3, смеситель 7, УПЧ 12, амплитудный детектор 11, 1-я ДЦ 10, ДППВ 15, ДОГ 16, 2-я ДЦ 17, диод 18 и ключ 13 соединены последовательно. Антенна 4 соединена с антенным входом антенного переключателя 3. Гетеродин 8 соединен со 2-м входом смесителя 7. Генератор высокой частоты 6 соединен со 2-м входом усилителя мощности 2, 1-й вход которого соединен также со входом блока расширения строб-импульсов 5 и 1-м входом счетчика 14, выход которого соединен со входом индикатора 19, а 2-й вход с выходом ключа 13, 2-й вход которого соединен с выходом регулируемой ЛЗ 9, вход которой подключен к выходу блока расширения строб-импульсов 5.
Радиолокационное устройство распознавания состава цели работает следующим образом.
ГВЧ 6 вырабатывает сверхвысокочастотные (СВЧ) гармонические колебания на несущей частоте fн, которые поступают в усилитель мощности 2, где из них вырезаются прямоугольные СВЧ-импульсы в соответствии с законом модуляции, навязываемым импульсным модулятором 1. СВЧ-импульсы проходят антенный переключатель 3 и через антенну 4 излучаются в пространство. Отразившись от целей, импульсы с измененными параметрами поступают в антенну 4 и далее в антенный вход антенного переключателя 3, после чего подаются на первый вход смесителя 7, на втором входе которого постоянно присутствуют колебания гетеродина 8. На выходе смесителя 7 формируется сигнал на промежуточной частоте. Указанный сигнал усиливается в УПЧ 12 и поступает на амплитудный детектор 11, где выделяется огибающая данного сигнала.
При применении зондирующих импульсов длительностью порядка нескольких микросекунд отраженный сигнал в пределах одного отраженного импульса может содержать информацию о нескольких целях, следующих друг за другом на небольших расстояниях, так как импульсный объем составляет по дальности величину порядка нескольких сотен метров. Очевидно, что группа целей, летящих с интервалом десятки-сотни метров, будет восприниматься радиолокатором как одиночная цель, поскольку вся информация об этих целях будет заключена в одном отраженном импульсе (цели "размещены" в одном импульсном объеме РЛС). На фиг. 2, а представлены три гипотетические многоточечные цели, следующие друг за другом на расстояниях, сравнимых с их собственными размерами. Отраженные сигналы этих целей не будут разрешимы между собой, так как все три (или более) цели находятся в пределах одного импульсного объема. При этом отраженный от групповой цели сигнал на выходе амплитудного детектора 11 может иметь вид, показанный на фиг. 2, б (вариант). Продемонстрированные на данном эпюре перепады уровня отраженного сигнала обусловлены интерференцией волн, отраженных от локальных рассеивающих центров (РЦ) на поверхностях целей 1, 2 и 3 при их зондировании сигналом РЛС, несущая частота которого соответствует области квазиоптического отражения радиоволн. В связи с этим положения перепадов уровня отраженного сигнала на временной оси определяются взаимным расположением РЦ в структурах целей в радиальном направлении. Временная расстановка перепадов условно привязана к положению РЦ поверхностей целей (фиг. 2, а) для улучшения зрительного восприятия и понимания процессов.
Сигнал с выхода амплитудного детектора 11 проходит 1-ю ДЦ 10, выходные сигналы которой показаны на фиг. 2, в. Положение импульсов на выходе 1-й ДЦ 10 также определяется положением РЦ целей вдоль линии визирования. Пройдя далее ДППВ 15, описанные импульсы становятся однополярными, как показано на фиг. 2, г, после чего поступают на вход ДОГ 16, где производится выделение огибающей этих импульсов (фиг. 2, д). Следует обратить особое внимание на выбор постоянной времени разряда (длительности заднего фронта выходного импульса) ДОГ 16. Постоянная времени разряда должна выбираться исходя из двух условий:
а) невозможности существенного снижения уровня сигнала при наибольших расстояниях между РЦ в пределах одной цели;
б) обеспечения максимального снижения уровня сигнала в интервалах между отдельными целями.
Так как эти условия противоречивы, то полностью их выполнить для всех тактических ситуаций невозможно. Однако, учитывая то, что для реальных крупноразмерных целей в квазиоптической области отражения радиоволн расстояния между РЦ не могут превысить величины порядка 10 метров, а также то, что допустимые интервалы между целями, как правило, больше 20 м, целесообразно выбрать постоянную времени разряда такой, чтобы на интервале времени, соответствующем радиальному расстоянию в 20 м, обеспечивалось полное затухание выходного сигнала ДОГ 16.
С выхода ДОГ 16 сигналы проходят 2-ю ДЦ 17, выходные сигналы которой показаны на фиг. 2, е. Положение импульсов на выходе 2-й ДЦ 17 соответствует передним и задним фронтам видеоимпульсов целей на выходе ДОГ 16. Далее сигналы проходят диод 18, что обеспечивает отсечку импульсов отрицательной полярности, и подаются на 1-й вход ключа 13, который передает их на 2-й вход счетчика 14 только при наличии на 2-м входе ключа 13 строб-импульса.
Строб-импульс формируется блоком расширения строб-импульсов 5 из модулирующего импульса положительной полярности, поступающего с выхода импульсного модулятора 1. Блок 5 увеличивает длительность модулирующего импульса в 2 раза. Это сделано для того, чтобы на счетчик 14 пропустить с выхода диода 18 все выработанные импульсы, поскольку длительность отраженного импульса может увеличиваться (не более чем в 2 раза) в зависимости от взаимного удаления первой и последней целей, попадающих в один неразрешаемый импульсный объем РЛС. Расширенный строб-импульс, сформированный в блоке 5, задерживается в регулируемой линии задержки 9. Это сделано для того, чтобы ключ 13, управляемый строб-импульсом, открывался только на том участке дистанции (по времени), на котором находится отметка от цели, выбранной для распознавания. Подобная процедура заложена и в прототипе [2] однако там не предусмотрено расширение управляющих строб-импульсов. Расширение строб-импульсов необходимо также и потому, что оператор РЛС не может обеспечить точного совпадения строб-импульса с отметкой от цели (во всех типовых РЛС отечественного производства строб, именуемый чаще дальностным визиром, всегда выбирается несколько шире возможной отметки цели).
Полученные на выходе диода 18 положительные импульсы проходят во временном интервале строб-импульса через ключ 13 на счетчик 14, сбрасываемый в нулевое состояние по первому входу в каждом периоде зондирования сигналом импульсного модулятора 1. Учитывая тот факт, что число N импульсов с выхода диода 18 принимает значение N 2n или N 2n 1, где n число одиночных целей, попавших в неразрешаемый импульсный объем РЛС (это связано с тем, что перепады уровня отраженного сигнала происходят не только по мере поочередного достижения передним фронтом зондирующего импульса РЦ разноудаленных целей, но и по мере выхода заднего фронта зондирующего импульса из соприкосновения с различными РЦ целей), счетчик 14 должен реагировать на каждый нечетный входной импульс. Тогда подсчитанное им число импульсов будет соответствовать числу целей, входящих в состав распознаваемой групповой цели.
Напряжение, пропорциональное числу одиночных целей в составе групповой, или цифровой код с аналогичной информацией, поступает с выхода счетчика 14 на вход индикатора 19, где данная информация визуализируется на световом табло, то есть становится доступной оператору РЛС.
Как следует из вышеизложенного, предлагаемое устройство распознавания состава цели способно определять количество одиночных целей в неразрешаемом импульсном объеме РЛС (в составе групповой цели), если радиальные интервалы между одиночными целями не являются меньшими размеров самих целей. Достоинством описанного устройства является простота его технической реализации и то, что оно использует для зондирования в квазиоптической области отражения радиоволн простые узкополосные сигналы, находящие широкое применение в современном парке импульсных РЛС.
Литература
1. Авиационные радиолокационные устройства. Под ред. П.И. Дудника, М. ВВИА им. Н.Б. Жуковского, 1986, с. 201, рис. 7.13 (аналог).
2. Небабин В. Г. Сергеев В.В. Методы и техника радиолокационного распознавания. М. Радио и связь, 1984, с. 36 37, рис 2.2 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| РЛС РАСПОЗНАВАНИЯ ЦЕЛЕЙ | 1996 |
|
RU2095825C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ СИГНАЛОВ | 1996 |
|
RU2095826C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ | 1996 |
|
RU2097782C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1996 |
|
RU2096803C1 |
| РАДИОЛОКАЦИОННОЕ РАСПОЗНАЮЩЕЕ УСТРОЙСТВО | 1996 |
|
RU2095824C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ ДВУХЧАСТОТНЫМ СПОСОБОМ | 1996 |
|
RU2114443C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 1995 |
|
RU2095822C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ | 1997 |
|
RU2129286C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ЦЕЛЕЙ | 1996 |
|
RU2099736C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1995 |
|
RU2079857C1 |

Устройство относится к радиолокационной технике и может быть использовано в импульсных РЛС с простыми узкополосными зондирующими сигналами для определения количества одиночных целей, находящихся в одном неразрешаемом импульсном объеме РЛС. Целью изобретения является обеспечение возможности определять количественный состав неразрешаемой при узкополосном импульсном зондировании групповой цели. Для достижения поставленной цели в состав ранее известного устройства дополнительно вводят усилитель мощности, гетеродин, схему расширения, счетчик импульсов, индикатор, последовательно соединенные усилитель промежуточной частоты, амплитудный детектор, 1-ю дифференцирующую цепь (ДЦ), двухполупериодный выпрямитель, детектор огибающей, 2-ю ДЦ, диод, изменяя при этом межблочные связи схемы. Положительный эффект, достигаемый новым построением устройства распознавания заключается в том, что появляется возможность устанавливать количественный состав групповой цели на основе простого узкополосного зондирования пространства импульсами длительностью единицы микросекунд, что легко реализуемо в РЛС современного парка. 2 ил.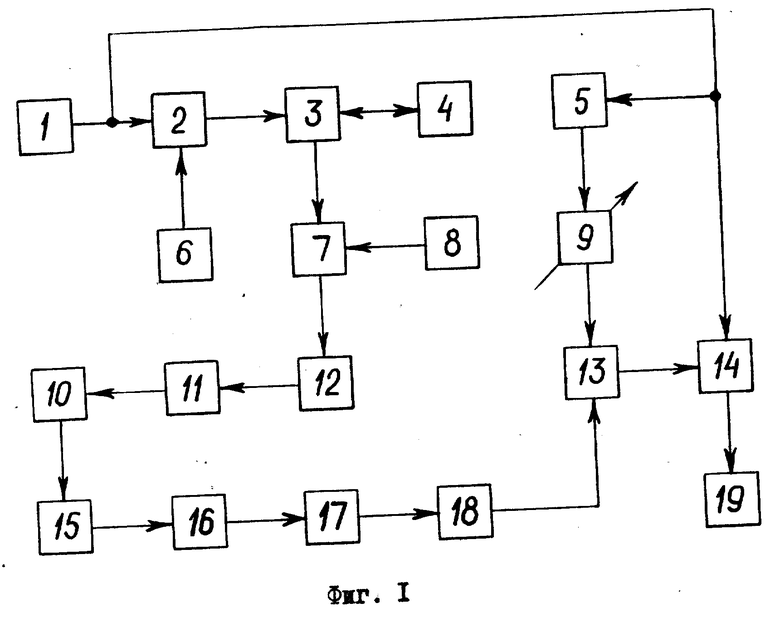
Радиолокационное устройство распознавания состава цели, содержащее импульсный модулятор, генератор высокой частоты, смеситель, регулируемую линию задержки, антенну и соединенный с ней антенным входом антенный переключатель, отличающееся тем, что в состав устройства дополнительно включены усилитель мощности, гетеродин, блок расширения строб-импульсов, счетчик, индикатор, последовательно соединенные усилитель промежуточной частоты, амплитудный детектор, первая дифференцирующая цепь, двухполупериодный выпрямитель, детектор огибающей, вторая дифференцирующая цепь и диод, причем генератор высокой частоты соединен своим выходом с вторым входом усилителя мощности, выход которого соединен с входом антенного переключателя, а первый вход - одновременно с выходом импульсного модулятора, входом блока расширения строб-импульсов и первым входом счетчика, выход которого соединен с входом индикатора, а второй вход с выходом ключа, первый вход которого подключен к выходу диода, а второй к выходу регулируемой линии задержки, вход которой соединен с выходом блока расширения строб-импульсов, выход гетеродина при этом соединен с вторым входом смесителя, выход которого соединен с входом усилителя промежуточной частоты, а первый вход с выходом антенного переключателя.
| Небабин В.Г., Сергеев В.В | |||
| Методы и техника радиолокационного распознавания | |||
| - М.: Радио и связь, 1984, с | |||
| Коридорная многокамерная вагонеточная углевыжигательная печь | 1921 |
|
SU36A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
