Изобретение относится к судостроению, в частности к подводной технике.
Известна система, созданная на базе телеуправляемого аппарата "Phantom HD 2" с акустической системой наведения (Подводно-технические, водолазные и судоподъемные работы. Гидротехнические сооружения. Экспресс-информация. М. ВИНИТИ, 1991, N 6, реф. 55). Телеуправляемый подводный аппарат оборудован вьюшкой с подъемным тросом и самозацепляющимися гаками на конце. Он отыскивает объект на морском дне, при помощи самозацепляющихся гаков подсоединяет объект к подъемному тросу и поднимается на поверхность. При этом подъемный трос свободно вытравливается с помощью вьюшки. После подъема на поверхность верхний конец подъемного троса передается на обеспечивающее судно и объект поднимают при помощи лебедки.
К недостаткам прототипа следует отнести малую рабочую глубину системы и небольшой вес поднимаемых объектов.
Глубина, с которой может быть поднят объект, ограничивается рабочей глубиной телеуправляемого подводного аппарата "Phantom HD 2" (300 м), конструктивной возможностью размещения на нем вьюшки с размерами, достаточными для размещения на ней кабеля необходимой длины, грузоподъемностью телеуправляемого подводного аппарата и его маневренными качествами.
Вес поднимаемого объекта также ограничен грузоподъемностью телеуправляемого подводного аппарата и размерами вьюшки, требующих увеличения при увеличении веса объекта.
Основной технический результат изобретения увеличение глубины, с которой может быть поднят объект, и увеличение веса поднимаемого объекта.
Дополнительные технические эффекты это уменьшение вероятности запутывания кабеля при подъеме и уменьшении требований к конструктивному размещению подъемного троса из-за его малой длины.
Указанный технический результат достигается за счет того, что система для поднятия объектов с морского дна на обеспечивающее судно, содержащая соединительный кабель и телеуправляемый подводный аппарат, снабженный системой поиска объектов, подъемным тросом, устройством для размещения и свободного вытравливания последнего, самозахватным устройством, дополнительно содержит грузонесущий кабель-троса, заглубитель и стыковочное устройство, причем один конец грузонесущего кабель-троса закреплен на обеспечивающем судне, заглубитель связан с телеуправляемым подводным аппаратом соединительным кабелем, а стыковочное устройство состоит из двух частей, одна из которых установлена на заглубителе и к ней прикреплен второй конец грузонесущего кабель-трос, вторая часть стыковочного устройства установлена на телеуправляемом подводном аппарате и к ней прикреплен один конец подъемного троса, который вторым своим концом соединен с самозахватным устройством.
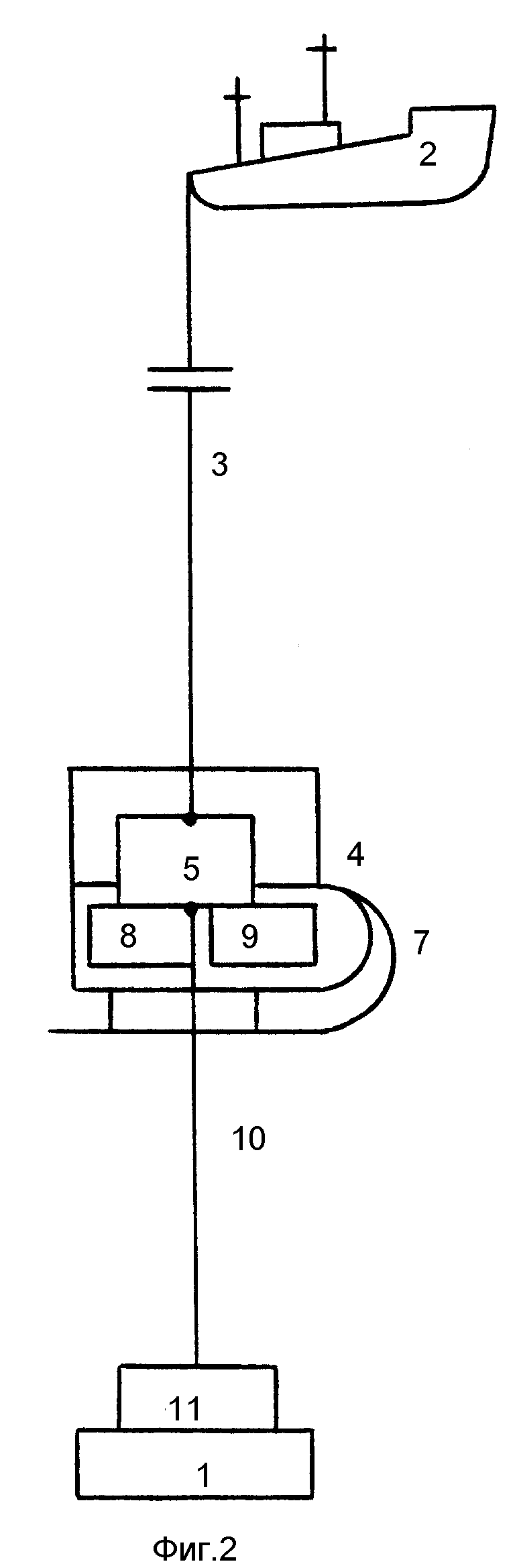
На фиг. 1 изображена блок-схема системы при подсоединении объекта; на фиг. 2 блок-схема системы при подъеме объекта.
Система для поднятия объекта 1 с морского дна на обеспечивающее судно 2 содержит грузонесущий кабель-трос 3, заглубитель 4 с закрепленной на нем первой частью стыковочного устройства 5, соединительный кабель 6, тереуправляемый подводный аппарат 7 с закрепленной на нем второй частью стыковочного устройства 5, с устройством 8 для размещения и свободного вытравливания подъемного троса, системой 9 поиска объектов, подъемный трос 10, на конце которого закреплено самозахватное устройство 11.
Система работает следующим образом.
С обеспечивающего судна 2 спускаются на грузонесущем кабель-тросе 3 заглубитель 4 и телеуправляемый подводный аппарат 7 в состыкованном состоянии. В непосредственной близости от дна телеуправляемый подводный аппарат отсоединяется от заглубителя 4 при помощи стыковочного устройства 5 и остается связанным с заглубителем 4 только соединительным кабелем 6. Телеуправляемый подводный аппарат 7 производит поиск объекта 1 с помощью системы 9 поиска объектов. Затем объект 1 подсоединяется к подъемному тросу 10 посредством самозахватного устройства 11. Телеуправляемый подводный аппарата 7 движется для соединения с заглубителем 4, при этом подъемный трос 10 свободно вытравливается из устройства 8 размещения и свободного вытравливания троса и объект 1 остается на дне. Телеуправляемый подводный аппарат 7 состыковывается с заглубителем 4, и две части стыковочного устройства 5 замыкаются, соединяя тем самым грузонесущий кабель-трос 3 и подъемный трос 10. Грузонесущий кабель-трос 3 поднимается на обеспечивающее судно 2, при этом после вытравливания подъемного троса 10 полностью объект 1 повисает на нем и поднимается таким образом на обеспечивающее судно 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ТИПА МИНЕРАЛА НА МОРСКОМ ДНЕ | 1991 |
|
RU2023276C1 |
| СПОСОБ И УСТРОЙСТВО КОРРЕКЦИИ КООРДИНАТ В ГИДРОАКУСТИЧЕСКОЙ СИСТЕМЕ НАВИГАЦИИ | 1994 |
|
RU2106657C1 |
| Способ проведения подводно-подледного сейсмопрофилирования с использованием перемещаемой подводным судном донной сейсморазведочной косы и технологический комплекс для его осуществления | 2014 |
|
RU2663308C2 |
| ТЕЛЕВИЗИОННАЯ СИСТЕМА | 1989 |
|
SU1816186A1 |
| ВЫКЛЮЧАТЕЛЬ ДАВЛЕНИЯ | 1993 |
|
RU2046434C1 |
| Источник для морской сейсморазведки | 1990 |
|
SU1778722A1 |
| СПОСОБ ПОЛУЧЕНИЯ АБРАЗИВНОГО МАТЕРИАЛА | 1994 |
|
RU2063302C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| Многослойная оболочка | 1989 |
|
SU1667919A1 |
| Устройство электроснабжения телеуправляемого необитаемого подводного аппарата с передачей энергии постоянного тока по кабель-тросу | 2020 |
|
RU2759118C1 |
Сущность изобретения: система содержит грузонесущий кабель-трос, заглубитель, соединительный кабель и телеуправляемый подводный аппарат, на котором размещена система поиска объектов, подъемный трос с самозахватным устройством и одна из двух частей стыковочного устройства, к которой прикреплен подъемный трос, другая часть стыковочного устройства установлена на заглубителе, и к ней прикреплен грузонесущий кабель-трос. 2 ил.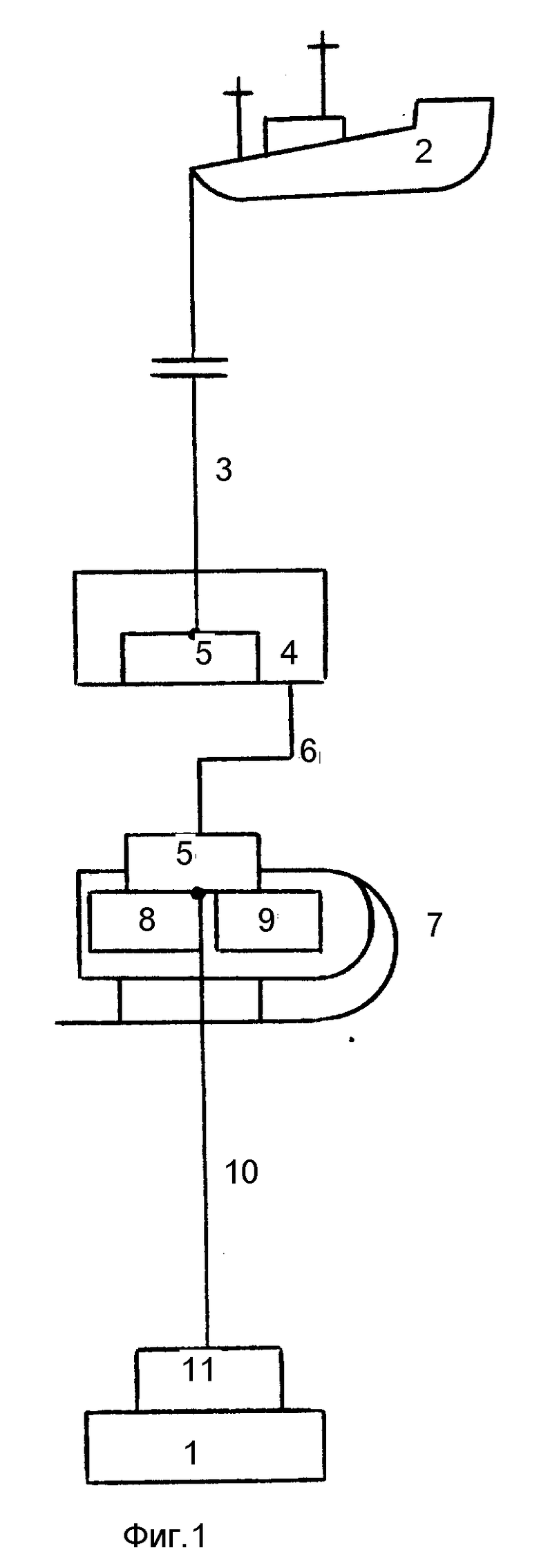
Система для поднятия объектов с морского дна на обеспечивающее судно, содержащая соединительный кабель и телеуправляемый подводный аппарат, снабженный системой поиска объектов, подъемным тросом, устройством для размещения и свободного вытравливания последнего, самозахватным устройством, отличающаяся тем, что она дополнительно содержит грузонесущий кабель-трос, заглубитель и стыковочное устройство, причем один конец грузонесущего кабель-троса закреплен на обеспечивающем судне, заглубитель связан с телеуправляемым подводным аппаратом соединительным кабелем, а стыковочное устройство состоит из двух частей, одна из которых установлена на заглубителе и к ней прикреплен второй конец грузонесущего кабель-троса, вторая часть стыковочного устройства установлена на телеуправляемом подводном аппарате и к ней прикреплен один конец подъемного троса, который вторым своим концом соединен с самозахватным устройством.
| Подводно-технические, водолазные и судоподъемные работы | |||
| гидротехнические сооружения | |||
| Экспресс-информация - М.: ВИНИТИ, 1991, N 6, реф | |||
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
