Изобретение относится к гидроакустическим навигационным средствам, а именно к гидроакустическим системам навигации (ГСН) с короткой и (или) сверхкороткой базовыми линиями, и может быть использовано при определении взаимного местоположения судна и гидроакустического маяка (ГМ), а также для определения местоположения подводного буксируемого или автономного аппарата относительно судна.
В ряде известных ГСН [7-9] с пониженными требованиями к точности определения местоположения объекта расчет прямоугольных координат X1, Y1, Z1 объекта проводят без учета качки судна, принимая, что гидроакустические приемники с короткой или сверхкороткой базами находятся в горизонтальной плоскости. В этом случае взаимные координаты ГМ и объекта (судна или подводного аппарата) находят по известным формулам [2, с. 10].
Однако плоскость, в которой находятся приемники ГСН движущегося объекта, практически никогда не совпадают с горизонтальной плоскостью [2, с. 11], поэтому повышение точности местоопределения требует учета крена и дифферента объекта.
Известен способ [2] коррекции определяемых по ГСН координат ГМ, учитывающий изменение значений крена η и дифферента γ , последовательность выполнения операций в котором описывается алгоритмом [2, ф-лы (11), (12): ,
,
где
H=Z1 - глубина установки ГМ;
X1, Y1, Z1 - нескорректированные прямоугольные координаты, полученные по измерениям ГСН;
X0, Y0 - скорректированные прямоугольные координаты;
η,γ - измеренные углы крена и дифферента соответственно. См. п. 1 примечаний.
Известно устройство [6], реализующее способ (1) [2], выполненное в виде блока обработки прямоугольных координат, имеющее четыре входа для измеренных величин сигналов, соответствующих значениям X1, Y1 и η,γ , а также два выхода для скорректированных значений X0, Y0 плановых координат.
Однако коррекция координат с помощью устройства [2] является в ряде случаев недостаточно точной, поскольку алгоритм (1) является приближенным. См. п. 2 примечаний.
Известен способ коррекции координат [1], учитывающий крен и дифферент объекта. Последовательность выполнения операций в способе [1] описывает алгоритмом [1, ф-ла 3.25]:
[x0y0z0]т = αβ(x1y1z1] (2)
где
X1, Y1, Z1 и X0, Y0, Z0 - прямоугольные координаты объекта без коррекции и с коррекцией соответственно:
α,β - параметры крена η и дифферента γ :
Известно также устройство, реализующее способ [1], выполненное в виде блока обработки прямоугольных координат (спецвычислителя) и имеющее пять входов для измеренных величин сигналов, соответствующих значениям η,γ и X1, Y1, Z1, а также три выхода скорректированных значений X0, Y0, Z0.
Этот способ [1] коррекции координат и устройство для его осуществления являются наиболее близкими по совокупности технических признаков и достигаемому техническому результату к предлагаемому техническому решению и приняты за прототип.
Однако, как показали математическое моделирование и экспериментальная оценка погрешности, способ и устройство [1], реализующее алгоритм (2), ограничены в применении малыми углами качки, относительно малыми глубинами и горизонтальными дальностями от объекта до ГМ, что не позволяет получить потенциальную точность коррекции координат в ГСН. См. п. 3 примечаний. Кроме того, прототип не учитывает третью степень свободы (поправку к курсовому углу) при движении судна, что при требованиях к высокой точности позиционирования в ГСН является в ряде случаев некорректным.
Сущность изобретения заключается в создании способа и устройства коррекции координат в ГСН, которые без каких-либо ограничений обеспечили бы адекватную корректную обработку измерительной информации, включая определение скорректированных пространственных координат X0, Y0, Z0 с учетом трех степеней свободы при движении судна, и позволили бы получить более точную по сравнению с прототипом коррекцию координат, а также значения точности определения местоположения, близкие к потенциальным.
Основная техническая задача изобретения - повышение точности коррекции координат в ГСН за счет дополнительного измерения и использования при определении координат поправки к курсовому углу, что позволяет (без каких-либо ограничений) получить корректное местоположение, учитывающее в отличие от известных способов и устройств не две, а три степени свободы при движении судна (объекта). При этом погрешность определения скорректированных координат может быть уменьшена в 1,5-2,0 раза при ошибке вычисления, близкой к нулю. См. п. 4 примечаний.
Технический результат достигается за счет того, что в способе коррекции координат в ГСН, включающем измерения нескорректированных координат X1, Y1, Z1 объекта, а также измерение крена η и дифферента γ с последующим определением по значениям X1, Y1, Z1, η,γ скорректированных координат X0, Y0, Z0, дополнительно измеряют поправку θ . См. п. 5 примечаний, к курсовому углу, а скорректированные координаты X0, Y0, Z0 определяют из соотношений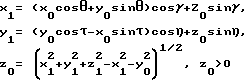
где
X1, Y1, Z1 - координаты объекта, определенные без коррекции;
X0, Y0, Z0 - скорректированные координаты;
η,γ,θ - крен, дифферент и поправка к курсовому углу соответственно;
τ = τ(η,γ,θ) - угол пространственной ориентации, определяемый из выражения). См. п. 6 примечаний.
sin(θ-τ)•cosγ•cosη+sinγ•sinη = 0
При этом угол τ пространственной ориентации определяют в зависимости от измеренной поправки θ к курсовому углу из соотношения. См. п. 7 примечаний.
θ-2° ≤ τ ≤ θ+2°
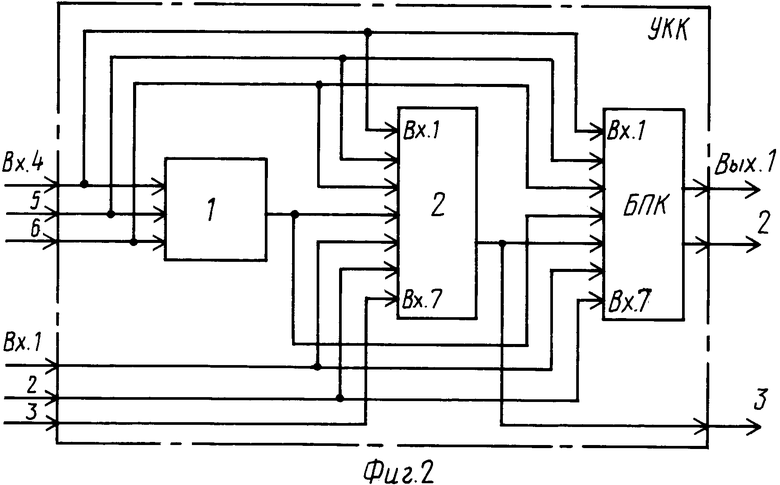
Технический результат устройства, реализующего предложенный способ достигается за счет того, что устройство коррекции координат (УКК) в ГСН, содержащее блок обработки измерительной информации, включающей прямоугольные координаты X1, Y1, Z1 объекта, его крен η и дифферент γ и имеющее пять входов и три выхода, причем первый третий входы УКК являются соответственно входами сигналов X1, Y1, Z1, 4-й и 5-й входы УКК являются соответственно входами сигналов η и γ , а первый-третий выходы УКК являются соответственно выходами скорректированных координат X0, Y0, Z0, дополнительно имеет 6-й вход для измеренной поправки θ к курсовому углу и включает в себя блок вычисления пространственной ориентации (БПО), блок вычисления координатной апликаты Z0 (БКА) и блок вычисления плановых координат X0, Y0 (БПК). Причем четвертый-шестой входы УКК подключены к первому-третьему входам БПО, к первому-третьему входам БКА и первому-третьему входам БПК. Выход БПО подключен к 4-му входу БКА и к 4-му входу БПК, 1-й вход УКК подключен к 5-му входу БКА и 6-му входу БПК, 2-й вход УКК - к 6-му входу БКА и 7-му входу БПК, а 3-й вход УКК - к 7-му входу БКА. Выход БКА подключен к 5-му входу БПК, а 1-й и 2-й выходы БПК и выход БКА являются соответственно первым-третьим выходами УКК.
Одним из основных отличительных признаков предлагаемого УКК является введение блока вычисления пространственной ориентации (БПО).
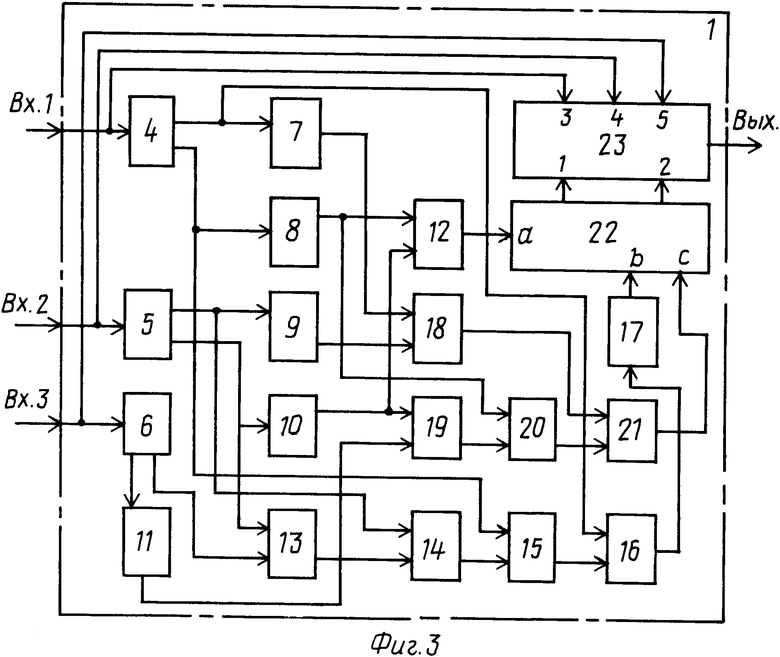
БПО включает в себя первое-третье устройства вычисления тригонометрических функций (УВТФ), первое-пятое устройства возведения в квадрат (УВК), первый-девятый умножители, вычитатель, устройство для решения квадратного уравнения (УРКУ) и устройство отбора. При этом вход 1-го УВТФ и 3-й вход устройства отбора объединены и являются 1-м входом БПО, вход 2-го УВТФ и 4-й вход устройства отбора объединены и являются 2-м входом БПО, вход 3-го УВТФ и 5-й вход устройства отбора объединены и являются 3-м входом БПО, 1-й выход 1-го УВТФ подключен к входу 1-го УВК и 1-му входу 5-го умножителя, 2-й выход 1-го УВТФ - к входу 2-го УВК и к 1-му входу 4-го умножителя, 1-й выход 2-го УВТФ подключен к входу 3-го УВК и к 1-му входу 3-го умножителя, 2-й выход 2-го УВТФ - к входу 4-го УВК и к 1-му входу 2-го умножителя. 1-й выход 3-го УВТФ подключен к 2-му входу 2-го умножителя, 2-й выход 3-го УВТФ - к входу 5-го УВК. Выход 1-го УВК подключен к 1-му входу 7-го умножителя, выход 2-го УВК - к 1-му входу 1-го умножителя и к 1-му входу 9-го умножителя. Выход 3-го УВК подключен к 2-му входу 7-го умножителя, выход 4-го УВК - к 1-му входу 8-го умножителя и к 2-му входу 1-го умножителя, выход 5-го УВК - к 2-му входу 8-го умножителя. Выход 1-го умножителя подключен к 1-му входу УРКУ, выход 2-го умножителя - к 2-му входу 3-го умножителя, выход 3-го умножителя - к 2-му входу 4-го умножителя. Выход 4-го умножителя подключен к 2-му входу 5-го умножителя, выход 5-го умножителя - к входу 6-го умножителя. Выход 6-го умножителя подключен к 2-му входу УРКУ, выход 7-го умножителя - к 1-му входу вычитателя. Выход 8-го умножителя подключен к 2-му входу 9-го умножителя, выход 9-го умножителя - к второму входу вычитателя. Выход вычитателя подключен к 3-му входу УРКУ. 1-й и 2-й выходы УРКУ подключены соответственно к 1-му и 2-му входам устройства отбора, а выход устройства отбора является выходом БПО.
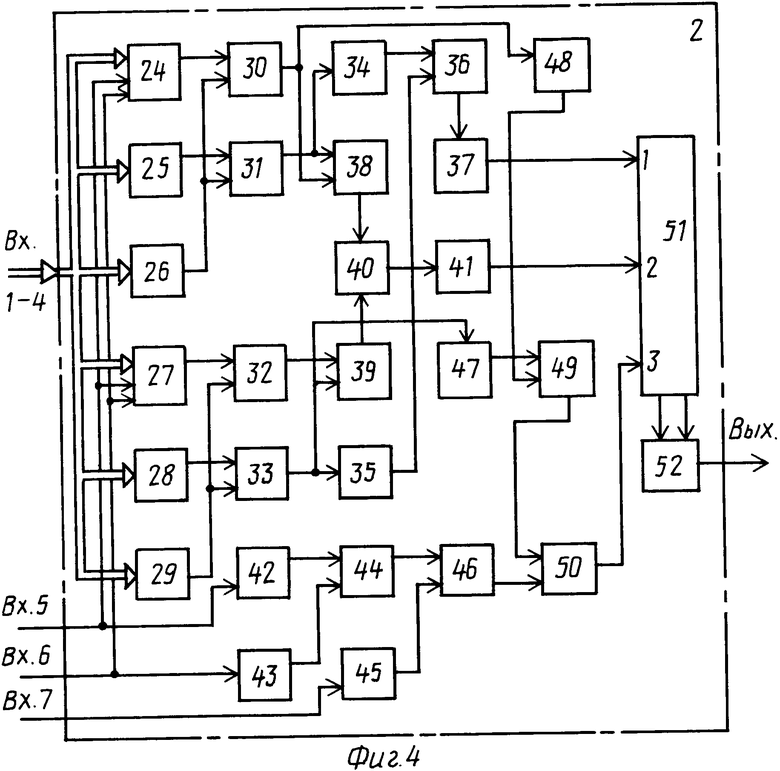
БКА выключает в себя первое-шестое устройства вычисления коэффициентов (УКФ), первый-четвертый делители, первый-третий умножители, первое-седьмое УВК, вычитатель, первый-шестой сумматоры, УРКУ и логическое устройство. При этом соответствующие первый-четвертый входы первого-шестого УКФ объединены и являются соответственно первым-четвертым входами БКА. 5-й вход 1-го УКФ, 5-й вход 4-го УКФ и вход 3-го УВК объединены и являются 5-м входом БКА, 6-е входы 1-го УКФ и 4-го УКФ объединены с входом 4-го УВК и являются 6-м входом БКА. Вход 5-го УВК является 7-м входом БКА. Выход 1-го УКФ подключен к 1-му входу 1-го делителя, выход 2-го УКФ - к 1-му входу 2-го делителя, выход 3-го УКФ - к вторым входам 1-го и 2-го делителей. Выход 4-го УКФ подключен к 1-му входу 3-го делителя, выход 5-го УКФ - к 1-му входу 4-го делителя, а выход 6-го УКФ - к вторым входам 3-го и 4-го делителей. Выход 1-го делителя подключен к 2-му входу 1-го умножителя и к входу 7-го УВК, выход 2-го делителя - к 1-му входу 1-го умножителя и к входу первого УВК, а выход 3-го делителя - к 1-му входу 2-го умножителя и к входу 6-го УВК. Выход 4-го делителя подключен к 2-му входу 2-го умножителя и к входу 2-го УВК. Выход 1-го УВК подключен к 1-му входу 1-го сумматора, выход 2-го УВК - к 2-му входу 1-го сумматора. Выход 1-го сумматора подключен к входу 2-го сумматора, выход которого подключен к 1-му входу УРКУ. Выход 1-го умножителя подключен к 1-му входу 3-го сумматора, а выход 2-го умножителя - к 2-му входу 3-го сумматора, выход которого подключен к входу 3-го умножителя. Выход 3-го умножителя подключен к 2-му входу УРКУ. Выход 3-го УВК подключен к 1-му входу 4-го сумматора, а выход 4-го УВК - к 2-му входу 4-го сумматора, выход которого подключен к 1-му входу 5-го сумматора. Выход 5-го УВК подключен к 2-му входу 5-го сумматора, выход которого подключен к 2-му входу вычитателя. Выход 6-го УВК подключен к 1-му входу 6-го сумматора, а выход 7-го УВК - к 2-му входу 6-го сумматора, выход которого подключен к 1-му входу вычитателя. Выход вычитателя подключен к 3-му входу УРКУ. 1-й и 2-й выходы УРКУ подключены соответственно к 1-му и 2-му входам логического устройства, выход которого является выходом БКА.
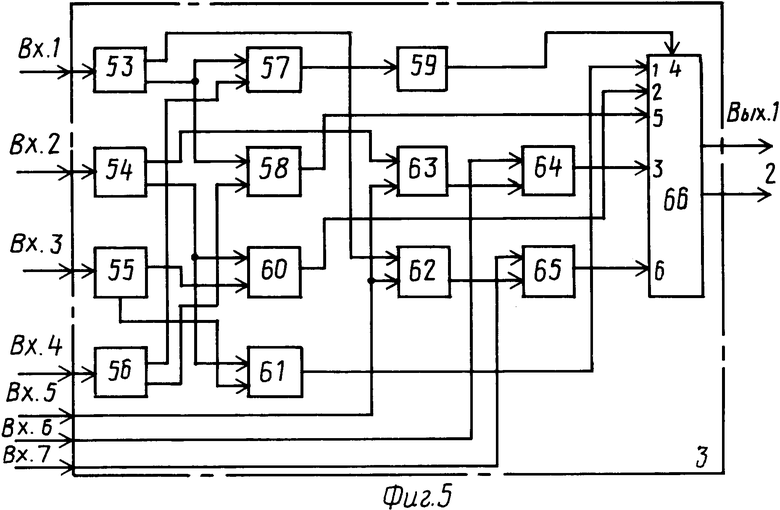
БПК включает в себя первое-четвертое устройства УВТФ, первый-седьмой умножители, первый и второй вычитатели и устройство для решения системы двух линейных уравнений (УРСУ). Причем входы первого-четвертого УВТФ являются соответственно первым-четвертым входами БПК, вторые входы 6-го и 7-го умножителей объединены и являются 5-м входом БПК, первые входы 1-го и 2-го вычитателей являются соответственно 6-м и 7-м входами БПК. 1-й выход 1-го УВТФ подключен к 1-му входу 6-го умножителя, 2-й выход 1-го УВТФ - к 1-му входам 1-го и 2-го умножителей. Выход 1-го умножителя подключен к входу 3-го умножителя. Выход 6-го и 7-го умножителей подключены соответственно к 2-м входам 2-го и 1-го вычитателей. Выходы 5-го умножителя, 4-го умножителя, 1-го вычитателя, 3-го умножителя, 2-го умножителя и 2-го вычитателя подключены соответственно к первому - шестому входам УРСУ, 1-й и 2-й выходы которого являются 1-м и 2-м выходами БПК соответственно.
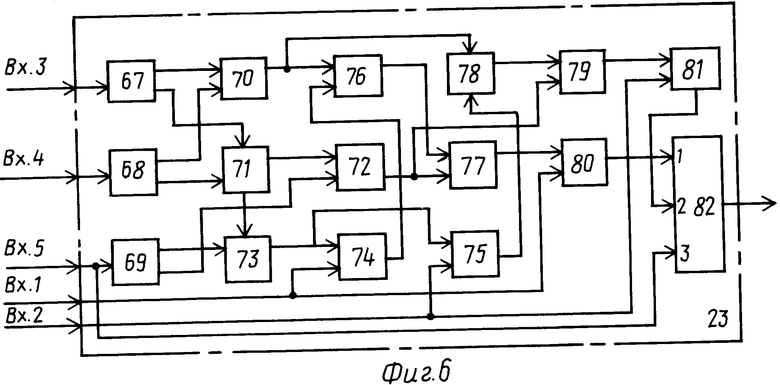
Устройство отбора (УО) блока БПО включает в себя первое - пятое устройства УВТФ, два сумматора, два делителя, первый - шестой умножители и логическое устройство. Причем 2-й вход 5-го умножителя и 2-й вход 4-го УВТФ объединены и являются 1-м входом УО, 2-й вход 6-го умножителя и 2-й вход 5-го УВТФ объединены и являются 2-м входом УО. Входы 1-го и 2-го УВТФ являются соответственно 3-м и 4-м входами УО, а объединяемые вход 3-го УВТФ и 3-й вход логического устройства 5-м входом УО. 1-й и 2-й выходы 1-го УВТФ подключены соответственно к первым входам 1-го и 2-го умножителей, 1-й и 2-й выходы 2-го УВТФ - соответственно к вторым входам 1-го и 2-го умножителей. 1-й выход 3-го УВТФ подключен к 2-му входу 4-го умножителя, 2-й выход 3-го УВТФ - к 2-му входу 3-го умножителя, а выход 1-го умножителя - к 1-му входу 1-го сумматора и к 1-му входу 2-го сумматора. Выход 2-го умножителя подключен к первым входам 3-го и 4-го умножителей, выход 3-го умножителя - к 2-м входам 1-го и 2-го делителей, а выход 4-го умножителя - к первым входам 5-го и 6-го умножителей. Выход 5-го умножителя подключен к 2-му входу 1-го сумматора, выход 6-го умножителя - к 2-входу 2-го сумматора. Выход 1-го сумматора подключен к 1-му входу 1-го делителя, выход 2-го сумматора - к 1-му входу 2-го делителя. Выход 1-го делителя подключен к 1-му входу 4-го УВТФ, выход 2-го делителя - к 1-му входу 5-го УВТФ, а выходы 4-го и 5-го УВТФ - соответственно к 1-му и 2-му входам логического устройства, выход которого является выходом УО.
Первое - шестое устройства УВК в блоке БКА выполнены в виде вычислительных средств, реализующих соответствующие алгоритмы по известным значениям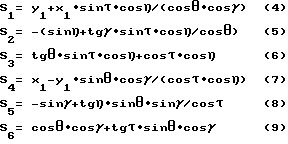
На фиг. 1 проиллюстрировано взаимное положение нескорректированной и скорректированной систем координат X1, Y1, Z1 и X0, Y0, Z0 при выполнении способа; на фиг. 2 представлена структурная схема УКК; на фиг. 3 - вариант выполнения БПО; на фиг. 4 - вариант выполнения БКА; на фиг. 5 - схема варианта выполнения БПК; на фиг. 6 - устройство отбора.
УКК содержит БПО 1, БКА 2 и БПК 3 (фиг. 2). БПО1 (фиг. 3) содержит первое - третье УВТФ 4, 5, 6, первое - пятое УВК 7-11, первый - девятый умножители 12-20, вычитатель 21, УРКУ 22 и УО 23. БКА 2 (фиг. 4) содержит первое - шестое устройства УКФ 24-29, первый - четвертый делители 30-33, первый - третий умножители 38, 39, 41, первое-седьмое УВК 34, 35, 42, 43, 45, 47, 48, вычитатель 50, первый - шестой сумматоры 36, 37, 40, 44, 46, 49, УРКУ 51 и логическое устройство 52. БПК 3 (фиг. 5) содержит первое-четвертое УВТФ 53-56, первый-седьмой умножители 57-63, первый и второй вычитатели 64 и 65, УРСУ 66. УО 23 (фиг. 6) содержит первое - пятое УВТФ 67-69, 80, 81, первый и второй сумматоры 76 и 78, первый и второй делители 77 и 79, первый-шестой умножители 70-75 и логическое устройство 82.
Способ коррекции координат выполняется следующим образом.
Традиционным методом (см. п. 8 примечаний) измеряют нескорректированные координаты X1, Y1, Z1 объекта, его крен η и дифферент γ . Затем дополнительно измеряют (см. п. 9 примечаний) поправку θ к курсовому углу. Скорректированные координаты X0, Y0, Z0 по измерениям X1, Y1, Z1, η,γ,θ определяют в соответствии с выражением (3).
Устройство УКК работает следующим образом.
На первый - шестой входы УКК поступают соответственно сигналы η,γ,θ , X1, Y1, Z1. Сигналы η,γ,θ подаются на входы БПО1, на выходе которого формируется сигнал τ . На семь входов БКА 2 поступают соответственно сигналы η,γ,θ,τ , X1, Y1, Z1, по которым БКА 2 на выходе вырабатывает сигнал Z0. БПК 3 по сигналам η,γ,θ,τ , X1, Y1, Z1 формирует на выходе сигналы X0 и Y0. Таким образом на трех выходах УКК вырабатываются сигналы, соответствующие скорректированным координатам X0, Y0, Z0.
БПО 1 работает следующим образом.
На входы УВТФ 4, 5, 6 поступают соответственно сигналы η,γ,θ . На двух выходах УВТФ 4, 5, 6 формируются соответствующие сигналы sinα и cosα(α = η,γ,θ). . УАК 7 выполняет операцию sin2η , а УВК 8 - операцию cos2η . На выходе УВК 9 вырабатывается сигнал sin2γ, , на выходе УВК 10 - сигнал cos2γ, . УВК 11 выполняет операцию cos2θ . На выходе умножителя 12 вырабатывается сигнал cos2γ,cos2η. . Умножитель 13 выполняет операцию cosγsinθ , умножитель 14 - операцию sinγ•cosγ•cosθ, , умножитель 15 - операцию sinη•cosη•sonγ•cosγ•sinγ , умножитель 16 - операцию cosη•cosγ•cosγ•cosθ, , а умножитель 17 - операцию умножения на два. На выходе умножителя 18 вырабатывается сигнал sin2η•sin2γ, , на выходе умножителя 19 - сигнал cos2γ•cos2θ, , на выходе умножителя 20 - сигнал cos2η•cosγ2•cosθ, , а на выходе вычитателя 21 - сигнал (sin2η•sin2γ-cos2η•cos2θ•cosγ). . УРКУ 22 формирует сигналы (cosτ)1 и (cosτ)2 , значения которых соответствуют значениям корней квадратного уравнения ax2+bx+c=0 с коэффициентами .
.
На выходе УО 23 формируется сигнал τ. .
БКА 2 работает следующим образом.
На первый - четвертый входы первого - пятого УКФ 24-29 поступают сигналы η,γ,θ и τ соответственно. На 5-й и 6-й входы УКФ 24 и УКФ 27 поступают соответственно сигналы X1 и Y1. На вход УВК 45 поступает сигнал Z1. На выходах УКФ 24-29 формируются сигналы, соответствующие значениям S1 oCS6 (выражения 4oC9). Делитель 30 выполняет операцию b1=S1/S3, делитель 31 - операцию a1=S2/S3, делитель 32 - операцию b2=S4/S6, а делитель 33 - операцию a2= S5/S6. На выходе УВК 34 вырабатывается сигнал a
a = 1+a
b=2(a1b1+a2b2);
c = b
Логическое устройство 52 выполняет операцию выбора из значений (Z0)1 и (Z0)2 неотрицательного значения. Таким образом, на выходе логического устройства 52, являющегося выходом БКА 2, формируется сигнал, соответствующий значению Z0.
БПК 3 работает следующим образом.
На входы УВТФ 53-56 поступают сигналы, соответствующие значениям η,γ,θ,τ. . На вторые входы умножителей 62 и 63 поступает сигнал Z1. На 1-й вход вычитателя 64 поступает сигнал X1, на 1-й вход вычитателя 65 - сигнал Y1. Сигнал Z1 поступает на вторые входы умножителей 62 и 63. На 1-м и 2-м выходах УВТФ 53 вырабатываются сигналы sinη и cosη. . На 1-м и 2-м выходах УВТФ 54 - сигналы sinτ и cosτ. . На 1-м и 2-м выходах УВТФ 55 формируются сигналы sinγ и cosγ, , на 1-м и 2-м выходах УВТФ 56 - сигналы sinθ и cosθ соответственно. Умножитель 57 выполняет операцию (sinτ•cosη), , а умножитель 59 - операцию (sinτ•cosη). . На выходе умножителя 58 вырабатывается сигнал (cosτ•cosη) , на выходе умножителя 60 - сигнал (cosγ•sinθ), , а на выходе умножителя 61 - сигнал (cosθ•cosγ). . Умножитель 62 выполняет операцию (z•sinη), , а вычитатель 65 - операцию (y-zsinη) . На выходе умножителя 63 формируется сигнал (z•sinγ), , а на выходе вычитателя 64 - сигнал (x-zsinγ) . На первом выходе УРСУ 66 вырабатывается сигнал X0, а на втором его выходе - сигнал Y0. Таким образом на трех выходах БПК формируются сигналы скорректированных координат X0, Y0, Z0.
Устройство отбора УО 23, входящее в БПО 1, работает следующим образом. На входы УВТФ 67-69 поступают сигналы η,γ,θ соответственно. Кроме того, сигнал θ поступает на 3-й вход логического устройства 82. Сигнал (cosτ)1 подается на вторые входы умножителя 74 и УВТФ 80, сигнал (cosτ)2 - на вторые входы умножителя 75 и УВТФ 81. На первых и вторых выходах УВТФ 67-69 вырабатываются сигналы sinα и cosα(α=η,γ,θ). . Умножитель 70 выполняет операцию (sinη•sinγ), , а умножитель 71 - операцию (cosη•cosγ). . На выходе умножителя 72 формируется сигнал (cosη•cosγ•cosθ), , на выходе умножителя 73 - сигнал sinθ•cosη•cosγ), , на выходе умножителя 74 - сигнал [(sinθ•cosη•cosγ•(cosτ)1] , на выходе умножителя 75 - сигнал [sinθ•cosη•cosγ(cosτ)2]. . Сумматор 76 выполняет операцию [sinη•sinγ+sinθ•cosη•cosγ(cosτ)1]. , а сумматор 78 - операцию [sinη•sinγ+sinθ•cosη•cosγ(cosτ)2]. . Делители 77 и 79 формируют сигналы (sinτ)1 и (sinτ)2 . См. п. 10 примечаний. УВТФ 80 по сигналам (sinτ)1 и (cosτ)1 формирует значение τ1 , а УВТФ 81 по значениям (sinτ)2 и (cosτ)2 - значение τ в интервале 0 ≤ τ1, τ2≤ 2π . Логическое устройство 82 выбирает из значений τ1 и τ2, значение, принадлежащее интервалу θ-2° ≤ τ ≤ θ+2°. . Таким образом, на выходе логического устройства 82 формируется сигнал τ , соответствующий углу пространственной ориентации.
Таким образом, за счет новых существенных признаков предложенных способа и устройства получен новый технический результат: повышения точности корректировки координат с учетом трех степеней свободы при движении судна (объекта). Возможность практического осуществления технического результата подтверждается испытаниями макета и моделированием процесса коррекции координат в ГСН с короткой и/или сверхкороткой базами. См. п. 11 примечаний.
Примечания.
1. Согласно [1, 2] принято, что ось X1 направлена к носу судна (объекта), ось Y1 - ортогонально правому борту и направлена в сторону правого борта. Оси X0 и Y0 лежат в горизонтальной плоскости и при отсутствии крена (η = 0) оси Y0 и Y1 совпадают, при отсутствии дифферента (γ = 0) совпадают оси X0 и X1. Оси Z0 и Z1 направлены вниз (см. фиг. 1).
Под углом крена η понимают угол между осью Y1 и ее проекцией на плоскость X0Y0, а под углом дифферента - угол между осью X1 и ее проекцией на плоскость X0Y0 (подробнее см. фиг. 1).
2. В [2] принято, что дифферент не сказывается на значении Y, а крен - на значении X, что не вполне корректно (см. подробнее 1, с. 30). Кроме того, значение третьей координаты Z принято равным H, что не выполняется в условиях качки, а координата Z0 в данном способе не определяется.
Математическое моделирование и экспериментальная оценка погрешностей показали, что способ [2] дает приемлемую точность коррекции координат лишь при глубинах ГМ более 5 тыс. м и при горизонтальных дальностях ГМ менее 700 м. При других значениях перечисленных параметров погрешность способа [2] возрастает.
Как показали матмоделирование и экспериментальная оценка погрешностей способ и устройство [1] дают приемлемую точность коррекции координат только при соблюдении хотя бы одного на следующих условий:
а) малые углы крена и дифферента (η,γ < 2°); ;
б) малые глубины установки ГМ (менее 2500 м);
в) при горизонтальных дальностях между объектом и ГМ не превышающих половину наклонной дальности.
Если эти условия не выполняются, то ошибка определения каждой их координат X0, Y0 может достигать 30-40 м, причем ошибка вычисления составит до 15 м. Для ГСН с повышенными требованиями к точности такие значения погрешностей не приемлемы (см. например [1]).
4. Основным отличительным признаком изобретения является учет не двух, а трех степеней свободы при движении судна. Как показал А.А.Борисов, необходимость введения третьей координаты обусловлена тем, что при углах крена и дифферента, отличных от нуля, либо ось X1 лежит в плоскости X0Z0, либо ось Y1 не лежит в плоскости Y0Z0, либо обе оси не лежат в указанных плоскостях (в противном случае оси X1 и Y1 были бы не ортогональны).
Введение 3-й степени свободы, т.е. дополнительное измерение и использование поправки к курсовому углу, что ранее не использовалось, обеспечивает полный корректный набор входных данных и делает погрешность вычисления координат, близкой к нулю.
Согласно известному (см., напр.: Штурман флота: Справочник по кораблевождению /В.И.Каманис, А.В.Лаврентьев, Р.А.Скубко. - М.: Воениздат, 1986, с. 308) соотношению для погрешности определения координат ,
,
где
mн.п. - погрешность, обусловленная измерением;
mв - погрешность вычисления,
при уменьшении погрешности вычисления уменьшается и погрешность определения координат.
Т.о. погрешность определения координат (mк=20oC40 м) при снижении погрешности mв вычисления до нуля уменьшается в предложенном изобретении в 1,5oC2,0 раза.
5. Поправка θ к курсовому углу представляет собой "дополнительный" угол к курсовому углу: угол между проекцией оси X1 на плоскость X0Y0 и осью X0, отсчитываемый по часовой стрелке от оси X0 (см. фиг. 1).
Способы измерения значений θ и технические средства для этого с помощью, например, среднеорбитальной спутниковой радионавигационной системы подробно описаны в [3].
Однако в литературных источниках (напр., в [3]) поправка θ используется лишь для оценки (уточнения) курса судна (объекта). Измерение значений θ для коррекции координат в ГСН предложено в данной заявке впервые.
6. Угол пространственной ориентации τ определяется как угол между проекцией оси Y1 на плоскость X0Y0 и осью Y0, отсчитываемый по часовой стрелке от оси Y0 (см. фиг. 1). Значение τ определяется из соотношения lx•ly=0, где lxly - единичные орты осей X и Y соответственно.
В системе координат X, Y, Z это соотношение имеет вид  . Произведя преобразования, можно из (п. 1) получить уравнения для cosτ и sinτ, , а следовательно, и значение τ , которое удовлетворяет условию: θ-2° ≤ τ ≤ θ+2°. . (Определение элементарно, но весьма громоздко, поэтому здесь не приводится).
. Произведя преобразования, можно из (п. 1) получить уравнения для cosτ и sinτ, , а следовательно, и значение τ , которое удовлетворяет условию: θ-2° ≤ τ ≤ θ+2°. . (Определение элементарно, но весьма громоздко, поэтому здесь не приводится).
Апликата Z0 определяется из соотношения (3) путем исключения из системы уравнений величин X0 и Y0. Не приводя полностью вывода формул, отметим, что подставив выражения (4) - (9) в (3) и произведя элементарные преобразования, получим квадратное уравнение вида ax2+bx+c=0 для определения Z0 (подробнее см. описание в части работы блока БКА 2), а из двух значений Z0 выбираем положительное.
Координаты X0, Y0 определяются из системы двух линейных уравнений (первые два уравнения системы (3) при известном значении апликаты Z0.
7. Соотношение обусловлено тем, что из двух значений τ выбирается ближайшее к θ (см. примеч. 6). Для реальных условий качки судна (при крене и дифференте 10 - 20o это условие, как правило (см. [1]), выполняется.
8. См. например [1], описывающий прототип.
9. См. примечание 5.
10. В соответствии с выражениями .
.
11. Математическое моделирование показало, что в реальных условиях движения судна точность определения каждой из координат увеличивается на 7 - 10 м (т.е. значение абсолютной погрешности снижается на 7 - 10 м), повышая точность определения местоположения объекта в 1,5 - 2,0 раза при ошибке вычисления координат, близкой к нулю (см. примеч. 4)
Источники информации
1. Милн П.Х. Гидроакустические системы позиционирования: Пер. с англ. - Л.: Судостроение, 1989, 232 с. (прототип, с. 30-32).
2. Гидроакустические навигационные средства /Бородин В.И., Смирнов Г.Е., Толстякова Н.А. и др. - Л.: Судостроение, 1983, 264 с. (аналог, с. 10-11).
3. Никитенко Ю. И., Устинов А.В. Алгоритмы оценки курса крена и дифферента по сигналам среднеорбитальной СРНС. - В кн.: Матер. 15 Всес. н.-т. конф. секции радиосвязи и радионавигации, 27-29 нояб. 1990, т. 2. - М., 1992 с. 61-65, с. 101-104.
4. (Польша) пат. 150923, кл. G 05 D 1/02, 1990 (см. РЖ "Водн.тр." N 1, 1992).
5. США, пат. 4238824, кл. G 06 F 15/50, НКИ 364-449, 1980.
6. СССР, пат 1838798, кл. G 01 S 5/00, опубл. Б.И. 1993, N 32, т. 2.
7. Гидроакустические навигационные средства для определения глубоководных объектов /Отсчет о патентных исследованиях. - ВЦПУ, Кишиневский ф-л, рег. N 03526, 1987, 172 с.
8. Гидроакустические навигационные системы /Отсчет о тематическом поиске. - ВЦПУ, Ростовский ф-л, 1988, 39 с.
9. Вычислительные устройства и системы гидроакустических станций /Отсчет о тематическом поиске. - ВЦПУ, Ростовский ф-л, 1989, 60 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидроакустическая система навигации акустической системы донных маяков | 1989 |
|
SU1838797A3 |
| ВЫКЛЮЧАТЕЛЬ ДАВЛЕНИЯ | 1993 |
|
RU2046434C1 |
| СИСТЕМА ДЛЯ ПОДНЯТИЯ ОБЪЕКТОВ С МОРСКОГО ДНА | 1994 |
|
RU2096251C1 |
| СПОСОБ ПОЛУЧЕНИЯ АБРАЗИВНОГО МАТЕРИАЛА | 1994 |
|
RU2063302C1 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПОСЛЕДОВАТЕЛЬНОГО ДЕЙСТВИЯ | 2003 |
|
RU2245000C2 |
| ТЕЛЕВИЗИОННАЯ СИСТЕМА | 1989 |
|
SU1816186A1 |
| Баровысотомер | 1979 |
|
SU879304A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТИПА МИНЕРАЛА НА МОРСКОМ ДНЕ | 1991 |
|
RU2023276C1 |
| Цифровой фильтр | 1983 |
|
SU1128265A1 |
| СПОСОБ ПОЛУЧЕНИЯ СОРБЕНТА | 1993 |
|
RU2084280C1 |
Использование: при определении взаимного местоположения судна и гидроакустического маяка, а также для определения местоположения подводного буксируемого или автономного аппарата относительно судна в гидроакустической системе навигации. Сущность изобретения: способ и устройство коррекции координат в гидроакустической системе навигации с корректной обработкой измерительной информации, включая определение скорректированных пространственных координат с учетом трех степеней свободы при движении судна за счет дополнительного измерения поправки к курсовому углу. Устройство содержит блок вычисления пространственной ориентации, блок вычисления координатной апликаты и блок вычисления плановых координат. Способ и устройство обеспечивают более точную по сравнению с известными коррекцию координат и уточнение местоположения объекте путем учете трех степеней свободы при движении объекта. 8 з.п. ф-лы, 6 ил.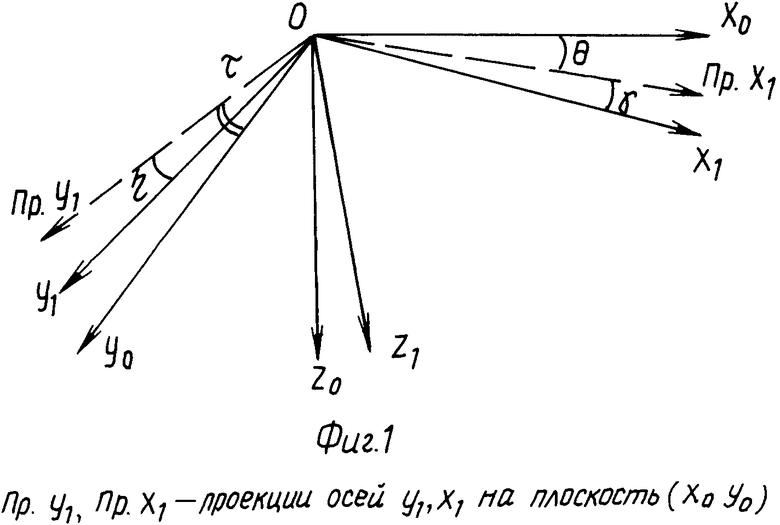
где X1, Y1, Z1 - координаты объекта, определенные без коррекции;
X0, Y0, Z0 - скорректированные координаты;
η, γ, θ - крен, дифферент и поправка к курсовому углу соответственно;
τ = τ(η,γ,θ) - угол пространственной ориентации, определяемый из выражения
sin(θ-τ)•cosγ•cosη+sinγ•sinη = 0.
2. Способ по п.1, отличающийся тем, что угол τ пространственной ориентации определяют в зависимости от измеренной поправки θ к курсовому углу из соотношения
3. Устройство коррекции координат в гидроакустической системе навигации выполнено в виде блока обработки измерительной информации, включающей прямоугольные координаты X1, Y1, Z1 объекта, его кран η и дифферент γ , и имеющее пять входов и три выхода, причем первый-третий входы устройства коррекции координат являются соответственно входами сигналов X1, Y1, Z1, четвертый и пятый входы устройства коррекции координат являются соответственно входами сигналов η и γ , а первый, второй и третий выходы устройства коррекции координат являются соответственно выходами скорректированных координат X0, Y0, Z0, отличающееся тем, что блок обработки измерительной информации, шестой вход которого является шестым входом устройства коррекции координат и является входом сигнала измеренной поправки θ к курсовому углу, содержит блок вычисления пространственной ориентации, блок вычисления координатной апликаты Z0 и блок вычисления плановых координат X0, Y0, причем четвертый-шестой входы устройства коррекции координат подключены к первому-третьему входам блока вычисления пространственной ориентации, к первому-третьему входам блока вычисления координатной апликаты Z0 и первому-третьему входам блока вычисления плановых координат X0, Y0, выход блока вычисления пространственной ориентации подключен к четвертому входу блока вычисления координатной апликаты Z0 и четвертому входу блока вычисления плановых координат X0, Y0, первый вход устройства коррекции координат подключен к пятому входу блока вычисления координатной апликаты Z0 и шестому входу блока вычисления плановых координат X0, Y0, второй вход устройства коррекции координат подключен к шестому входу блока вычисления координатной апликаты Z0 и седьмому входу блока вычисления плановых координат X0, Y0, третий вход устройства коррекции координат подключен к седьмому входу блока вычисления координатной апликаты Z0, выход блока вычисления координатной апликаты Z0 подключен к пятому входу блока вычисления плановых координат X0, Y0, а первый и второй выходы блока вычисления плановых координат X0, Y0 и выход блока вычисления координатной апликаты Z0 являются соответственно первым-третьим выходами устройства коррекции координат.
где X1, Y1 - значения измеренных плановых прямоугольных координат объекта;
η, γ, θ - измеренные значения крена, дифферента и поправки к курсовому углу соответственно;
τ - значение угла, измеренное блоком пространственной ориентации.
| Бородин В.И., Смирнов Г.Е., Толстякова Н.А | |||
| и др | |||
| Гидроакустические навигационные средства,-Л.: Судостроение, с.10-11, 1983 | |||
| Милн П.Х., Гидроакустические системы позиционирования, Пер | |||
| с англ., Л.: Судостроение, с.30-32, 1989 (прототип). |
