Изобретение относится к области радиолокационной техники и может быть использовано в радиолокаторах, определяющих дальность методом возвратно-поступательного движения луча.
Известно устройство обработки радиолокационных сигналов, входящее в состав «Устройства определения высоты», изложенного в патенте автора №2002277. В нем формирователь импульсов формирует импульсы в блок управления фазированием при возвратно-поступательном перемещении луча, выполняющего функции также и датчика направления перемещения луча. Частота излучения импульсов может быть увеличена в десять и более раз. Поле зрения приемника равно полю зрения фазированной антенной решетки. Дальность может быть определена в вычитателе, как разность направлений перемещения луча при прямом и обратном его ходе в моменты прихода отраженных сигналов, а направление характеризуется серединой этой разности и определяется с помощью узлов, представляющих из себя блок определения направления на объект. Однако точность определения дальности и направления зависят от величины скачкообразного перемещения луча. Кроме того, при увеличении количества объектов уменьшится время обзора.
Известно устройство обработки радиолокационных сигналов, входящее в состав патента №2119176 под названием «Устройство определения высоты». В нем в отличие от вышеупомянутого устройства уменьшается время обзора при увеличении количества объектов. При этом выделяются два сигнала, имеющих равные характеристики, в частности амплитуды, и делается вывод о принадлежности их к одному и тому же объекту. Значения этих характеристик поступают на адресный вход оперативного запоминающего устройства, по которому записываются и считываются направления перемещения луча в режиме «считывание - запись». Направления и дальности отображаются на индикаторе и определяются они также как и в вышеупомянутом первом аналоге. Однако точности определения дальности и направления также зависят от величины скачкообразного перемещения луча, и они уменьшаются также из-за флюктуации сигналов.
С помощью предлагаемого устройства увеличивается точность определения дальности и направления. Достигается это введением: линии задержки, блока определения направления на объект внутри луча методом последовательного сравнения амплитуд и сумматора направлений, при этом выход приемника соединен через линию задержки с первым входом блока определения направления внутри луча методом последовательного сравнения амплитуд, имеющим второй вход и в группу выходов, соответственно соединенные с вышеупомянутым выходом приемника и с первыми группами входов оперативного запоминающего устройства и сумматора направлений, вторая группа входов и группа выходов которого соответственно соединены с группой выходов датчика направлений перемещения луча и с вторыми группами входов вышеупомянутого оперативного запоминающего устройства и вычитателя.
На фиг.1 и в тексте приняты следующие обозначения:
1 - приемник;
2 - формирователь импульсов;
3 - линия задержки;
4 - блок определения направления на объект внутри луча методом последовательного сравнения амплитуд;
5 - сумматор направлений;
6 - датчик направлений перемещения луча;
7 - оперативное запоминающее устройство;
8 - вычитатель;
9 - блок определения направления на объект;
10 - индикатор,
при этом выход формирователя импульсов 2 соединен с входом датчика направлений перемещения луча 6, а группа выходов оперативного запоминающего устройства 7 соединена с первой группой входов вычитателя 8, группа выходов которого соединена с первой группой входов индикатора 10, имеющего вторую группу входов, соединенную через блок определения направления на объект 9 с группой выходов вышеупомянутого вычитателя 8, вторая группа входов которого соединена с второй группой входов оперативного запоминающего устройства 7 и с группой выходов сумматора направлений 5, имеющего первую группу входов, соединенную с группой выходов блока определения направления на объект внутри луча методом последовательного сравнения амплитуд 4, соединенного также с первой группой входов оперативного запоминающего устройства 7 и имеющего первый вход, соединенный через линию задержки 3 с выходом приемника 1 и со вторым входом вышеупомянутого блока определения направления на объект внутри луча методом последовательного сравнения амплитуд 4, а вторая группа входов сумматора 5 соединена с группой выходов датчика направлений перемещения луча 6.
Работа устройства осуществляется следующим образом.
Формирователь импульсов 2 выдает импульсы начала и конца сканирования в датчик направления перемещения луча 6, который последовательно выдает направления скачкообразно сканирующего луча в сумматор направлений 5 в процессе возвратно-поступательного его перемещения в прямом и обратном направлении. Частота излучения импульсов увеличена в десять и более раз. С помощью приемника 1 осуществляется преобразование отраженной электромагнитной энергии в электрические сигналы, и выделение этих сигналов по характеристикам, соответствующим ожидаемым объектам. Поле зрения приемника равно зоне обзора фазированной антенной решетки. Фазированная антенная решетка может осуществлять скачкообразное перемещение луча по любой программе. В частности, она осуществляет скачкообразные перемещения луча на величину менее собственной его ширины, например в 2-4 раза. При этом после каждого перемещения излучается один зондирующий импульс.
На фиг.2 показан объект 13, находящийся в зоне 11 до перемещения луча и в зоне 14 после его перемещения. При этом он не выходит за пределы общей зоны 12. Следовательно, создается возможность определить направление внутри луча на объект относительно центральных точек O1 и О, соответственно, при перемещениях луча в прямом и обратном направлении, что и осуществляется в блоке определения направления на объект внутри луча методом последовательного сравнения амплитуд 4, куда поступает сигнал с приемника через линию задержки 3, равную интервалу между отраженными сигналами. В момент прихода задержанного сигнала в блок 4, на второй его вход поступает следующий сигнал от этого объекта. В результате определяется направление на объект внутри луча методом отношения амплитуд, пример исполнения которого представлен в книге «Радиотехнические системы» Ю.М.Казаринов, 1990, стр.408, 412. Так как частота следования импульсов увеличена и может составлять, например, 100 мкс, то исключается погрешность, связанная с флюктуациями. При следующих же облучениях объекта после изменения направления движения луча, появление флюктуации не повлияет на точность определения направления. В сумматоре направлений 5 осуществляется сложение, например, угломестного направления текущего перемещения луча с датчика направления перемещения луча 6 с угломестным направлением на объект внутри луча с блока определения направления 4 и уточненное значение направлений поступает в вычитатель 8, и в работающее в режиме «считывание - запись», оперативное запоминающее устройство 7, по адресу с блока определения направления на объект внутри луча 4 методом последовательного сравнения амплитуд 4. В результате в вычитателе 8 считанное направление вычитается из текущего, и разность, характеризующая дальность до объекта, поступает в блок определения направления на объект 9, определяющего направления как середину вышеупомянутой разности с вычитателя 8 и выполняющего функции делителя на два, представленного в главном аналоге. Таким образом, объекты в зоне обзора выделяются по двум одинаковым направлениям внутри луча, определяемым при облучении в прямом и обратном ходе. Значения направления и дальности отображаются на индикаторе 10. За время между облучениями объекта при прямом, а затем при обратном ходе, которое может составлять 5-50 мс, он не сместится на величину, влияющую на достоверность определения дальности и направления.
Предлагаемое устройство можно использовать в системах управления воздушным движением при определении высоты и в процессе поиска объектов.
Информацию можно передавать в устройство вторичной обработки, осуществляющее построение траектории движения целей. Уменьшение времени определения дальности и направления при улучшении точностных характеристик обеспечивает экономический эффект.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2011 |
|
RU2460084C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВЫСОТЫ | 1996 |
|
RU2119176C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2005 |
|
RU2301428C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2012 |
|
RU2479850C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВЫСОТЫ | 1999 |
|
RU2168739C1 |
| УСТРОЙСТВО ОБРАБОТКИ ЛОКАЦИОННЫХ СИГНАЛОВ | 2000 |
|
RU2193216C2 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2005 |
|
RU2279690C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2010 |
|
RU2447456C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2008 |
|
RU2390037C1 |
| РАДИОЛОКАТОР | 1999 |
|
RU2161807C2 |
Изобретение относится к радиолокационной технике, в частности к радиолокаторам, определяющим дальность методом возвратно-поступательного движения луча. Достигаемым техническим результатом является повышение точности определения дальности и направления на объект. Указанный результат достигается за счет того, что в устройство обработки радиолокационных сигналов введены линия задержки, блока определения направления внутри луча методом последовательного сравнения амплитуд и сумматор направлений, при этом выход приемника соединен через линию задержки с первым входом блока определения направления внутри луча методом последовательного сравнения амплитуд, имеющим второй вход и группу выходов, соответственно соединенные с вышеупомянутым выходом приемника и с первыми группами входов оперативного запоминающего устройства и сумматора направлений, вторая группа входов и группа выходов которого соответственно соединены с группой выходов датчика направлений перемещения луча и с вторыми группами входов вышеупомянутого оперативного запоминающего устройства и вычитателя. 2 ил.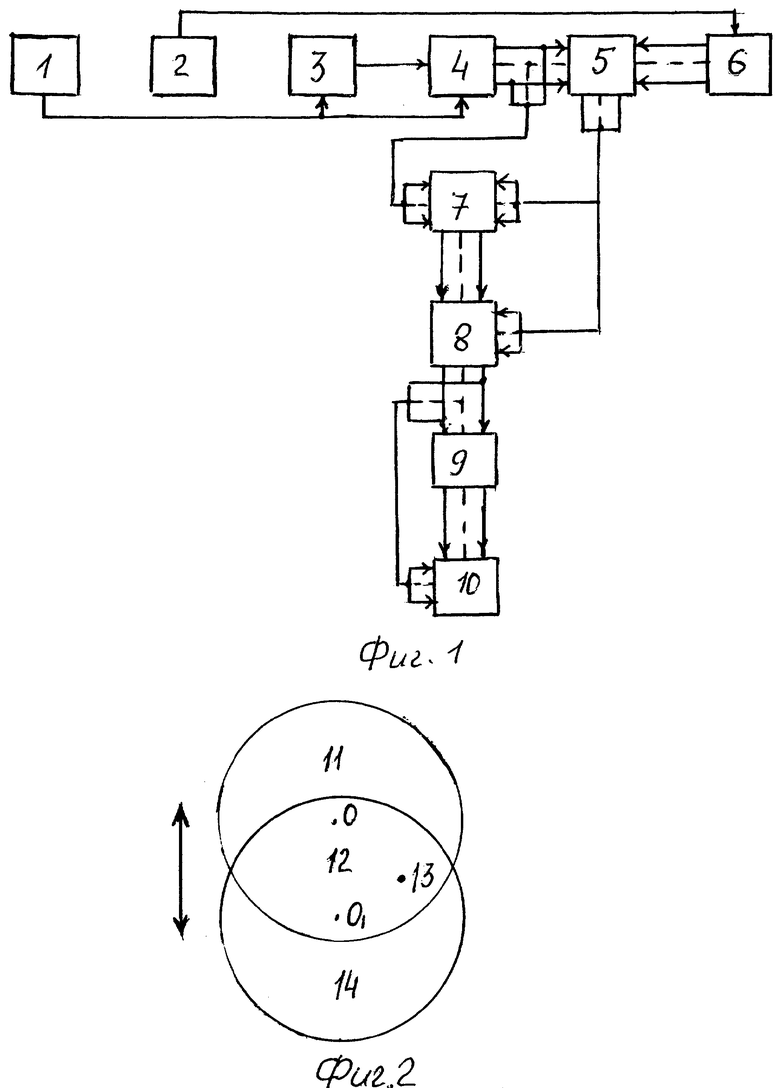
Устройство обработки радиолокационных сигналов, состоящее из приемника, формирователя импульсов, датчика направления перемещения луча, оперативного запоминающего устройства, вычитателя, блока определения направления на объект и индикатора, при этом выход формирователя импульсов соединен с входом датчика направлений перемещения луча, а группа выходов оперативного запоминающего устройства соединена с первой группой входов вычитателя, группа выходов которого соединена с первой группой входов индикатора, имеющего вторую группу входов, соединенную через блок определения направления на объект с группой выходов вышеупомянутого вычитателя, отличающееся тем, что вводится линия задержки, блок определения направления внутри луча методом последовательного сравнения амплитуд и сумматор направлений, при этом выход приемника соединен через линию задержки с первым входом блока определения направления внутри луча методом последовательного сравнения амплитуд, имеющим второй вход и группу выходов, соответственно соединенные с вышеупомянутым выходом приемника и с первыми группами входов оперативного запоминающего устройства и сумматора направлений, вторая группа входов и группа выходов которого соответственно соединены с группой выходов датчика направлений перемещения луча и с вторыми группами входов вышеупомянутого оперативного запоминающего устройства и вычитателя.
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВЫСОТЫ | 1996 |
|
RU2119176C1 |
| УСТРОЙСТВО ОБРАБОТКИ ЛОКАЦИОННЫХ СИГНАЛОВ | 2000 |
|
RU2193216C2 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА В РАДИОЛОКАЦИОННОЙ СИСТЕМЕ С ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКОЙ | 2003 |
|
RU2237909C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВЫСОТЫ | 1999 |
|
RU2168739C1 |
| US 2006220943 A1, 05.10.2006 | |||
| Способ определения текущих деформаций элементов силовой цепи | 1988 |
|
SU1666916A1 |
| Установка для тушения пожаров с воздуха | 1989 |
|
SU1631789A1 |

