Изобретение относится к области радиолокации и может быть использовано в радиолокаторах для поиска и слежения за объектами.
Известно устройство обработки радиолокационных сигналов, входящее в состав радиолокатора, изложенного в патенте №2161807 автора. В нем осуществлено определение дальности при увеличенной частоте зондирующих импульсов, используя значения направления, определяемые в пеленгационном приемном устройстве моноимпульсным методом. Запоминаются также направления излучения зондирующих импульсов и времена этих излучений. Дальность определяется в вычитателе между соответствующим запомненным временем в момент фиксации в пеленгационном приемном устройстве ранее запомненного направления и текущим временем. Однако точность определения дальности не всегда достаточна. Известно устройство обработки радиолокационных сигналов, изложенное в патенте №2390037, автор Часовской А.А.; в нем увеличивается точность определения дальности при увеличенной частоте излучения зондирующих импульсов благодаря определению центра пачки с пеленгационного приемного устройства в блоке определения центра пачки. Центральный импульс поступает в блок элементов совпадения, разрешая прохождение направления с пеленгационного приемного устройства в постоянное запоминающее устройство. В этом устройстве направления, которые наиболее близко совпадают с соответствующими направлениями передающего луча в момент излучения зондирующих импульсов, фиксируемых счетчиком, объединяются в направления в моменты излучения этих импульсов. При этом импульсы на вход счетчика поступают с блока фиксации перемещения луча в моменты поворота луча на определенную величину, аналогично датчику азимутальных меток или блоку фазирования. Запоминаются также значения направлений со счетчика в моменты излучения зондирующих импульсов и времена этих излучений. Дальность определяется в вычитателе между соответствующим запомненным временем и текущим временем. Однако для увеличения точности определения дальности необходимы сложные узлы, в частности оперативное запоминающее устройство, датчики времени и дополнительные логические узлы. С помощью предлагаемого устройства обеспечивается сохранение точности определения дальности без использования сложных узлов. Достигается это введением датчика азимутальных меток с секундным разрешением, счетчика меток, при этом выход датчика азимутальных меток с секундным разрешением соединен с первым входом счетчика меток, имеющего второй вход, соединенный с выходом блока фиксации перемещения луча, имеющего группу выходов, соединенную с первой группой входов вычитателя, вторая и третья группы входов которого соответственно соединены с группой выходов счетчика и с группой выходов постоянного запоминающего устройства.
На фиг.1 и в тексте приняты следующее обозначения:
1 - Пеленгацинное приемное устройство;
2 - Блок фиксации перемещения луча;
3 - Счетчик;
4 - Блок элементов совпадения;
5 - Блок определения центра пачки;
6 - Постоянное запоминающее устройство;
7 - Датчик азимутальных меток с секундным разрешением;
8 - Счетчик меток;
9 - Вычитатель.
При этом выход блока фиксации перемещения луча 2 соединен с входом счетчика 3 и со вторым входом счетчика меток 8, имеющего первый вход и группу выходов, соответственно соединенные с выходом датчика азимутальных меток с секундным разрешением 7 и с первой группой входов вычитателя 9, вторая и третья группы входов которого соответственно соединены: с группой выходов счетчика 3 и через постоянное запоминающее устройство 6 с группой выходов блока элементов совпадения 4, имеющего вход и группу выходов, соответственно соединенные: через блок определения центра пачки 5 с отдельным выходом пеленгационного приемного устройства 1 и с группой выходов этого устройства.
Устройство работает следующим образом.
Блок фиксации перемещения луча 2 в момент поворота луча на определенную величину выдает импульс, в том числе и как команду для излучения зондирующего импульса в процессе вращения узкого передающего луча. Количество этих импульсов подсчитывается с помощью счетчика 3, самостоятельно устанавливающегося в исходное состояние после определенного количества импульсов.
За время поворота передающего луча значения на выходах счетчика 3 характеризуют угловые значения в моменты излучения зондирующих импульсов за время одного обзора. Блок фиксации перемещения луча 2 работает аналогично датчику азимута, который через определенный угол перемещения луча выдает сигнал. При использовании фазированной антенной решетки следующие друг за другом импульсы поступают с блока управления фазированием, который выполняет функции вышеупомянутого блока 2. После определенного количества сигналов в конце обзора он самостоятельно устанавливается в исходное состояние. В отличие от главного аналога в предлагаемое устройство вводится датчик азимутальных меток с секундным разрешением 7 и счетчик меток 8.
Датчик азимутальных меток 7 выдает следующие друг за другом метки в счетчик меток, который устанавливается в исходное состояние импульсом с блока фиксации перемещения луча 2.
Пеленгационное приемное устройство 1 определяет моноимпульсным методом в процессе обзора направление прихода отраженных от объектов сигналов. Ширина зоны пересечения диаграмм превышает ширину передающего луча, вращающегося синхронно. Однако эта зона повернута в сторону, обратную вращению. Пример конкретного исполнения пеленгационного приемного устройства, в том числе и работающего на проходе, представлен в книге А.Н.Волжина, Ю.Г.Сизова «Борьба с самонаводящимися ракетами», М., Военное издательство, 1983 г., стр 37-39, рис. 1.16.б. Электрические импульсы, преобразованные из электромагнитных, с выхода пеленгационного приемного устройства 1 поступают в блок определения центра пачки 5. Последний, анализируя длительность пачки, выдает, в момент прихода центрального импульса в блок элементов совпадения 4, разрешение на прохождение информации о направлении с группы выходов вышеупомянутого устройства 1 на группу входов постоянного запоминающего устройства 6. Пример конкретного исполнения блока определения центра пачки представлен, например, в книге Казаринова Ю.М. «Радиотехнические системы», М., Высшая школа, 1990 г., стр.383.
В постоянном запоминающем устройстве 6 направления, которые наиболее близко совпадают с соответствующими направлениями центральной оси передающего луча в момент излучения зондирующих импульсов, фиксируемых счетчиком 3, объединяются в направления, информация о которых хранится в памяти постоянного запоминающего устройства, и поступают с группы выходов постоянного запоминающего устройства 7 на группу входов вычитателя 9. При равноудаленных значениях направлений выбор хранящегося в памяти направления не осуществляется и может быть произведен при следующем обзоре. В вычитателе 9 происходит вычитание текущего направления с выделенным в постоянном запоминающем устройстве. При этом текущее направление состоит из грубого направления со счетчика 3 и уточненного со счетчика меток 8, с групп выходов которых значения поступают соответственно на вторую и первую группы входов вышеупомянутого вычитателя 9. В результате обе группы входов несут в себе информацию о текущем направлении центральной оси передающего луча с секундным разрешением. Таким образом, обеспечиваются достаточные точностные характеристики по дальности, при использовании быстродействующих интегральных элементов. Необходимо отметить, что при использовании фазированной антенной решетки и равномерном скачкообразном перемещения луча в качестве датчика азимутальных меток можно использовать тактовый генератор, где частота тактовых импульсов зависит от периода перемещения луча. При этом равносигнальная зона пеленгационного приемного устройства также скачкообразно перемещается синхронно с передающим лучом. При наличии двух импульсов в пачке в качестве центрального в блоке 5 выбирается импульс, имеющий большую амплитуду, так как он находится ближе к максимуму диаграммы. Приведем пример конкретного применения. Пусть луч совершает круговой обзор пространства. Ширина луча по азимуту 0,5° по углу места 3°, частота излучения зондирующих импульсов 2 кГц. После перемещения луча на 6 минут излучается импульс. Синхронно с передающим лучом сканирует зона пересечения приемных диаграмм шириной 3,25°, которая повернута в сторону, обратную вращению. При этом обеспечивается разрешающая способность по направлению - 5 минут, при максимальной дальности обнаружения 600 км. Тогда время кругового обзора составит 1,1 сек. Возможно одновременное вращение нескольких диаграмм.
Предлагаемое устройство может быть использовано в системах управления воздушным движением, в том числе за быстро смещающимися целями. Упрощение устройства удешевляет его изготовление, что обеспечивает экономический эффект.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2012 |
|
RU2479850C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2008 |
|
RU2390037C1 |
| РАДИОЛОКАТОР | 2008 |
|
RU2402039C2 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2011 |
|
RU2460084C1 |
| РАДИОЛОКАТОР | 2007 |
|
RU2337377C1 |
| РАДИОЛОКАТОР | 1999 |
|
RU2161807C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ | 2010 |
|
RU2421749C1 |
| РАДИОЛОКАТОР | 2008 |
|
RU2366970C1 |
| РАДИОЛОКАТОР | 1992 |
|
RU2073883C1 |
| ДАТЧИК АЗИМУТАЛЬНЫХ МЕТОК | 1998 |
|
RU2186406C2 |
Изобретение относится к радиотехнике и предназначено для обработки радиолокационных сигналов. Устройство состоит из пеленгационного приемного устройства, блока фиксации перемещения луча, счетчика, блока определения центра пачки, блока элементов совпадения, постоянного запоминающего устройства и вычитателя, где отдельный выход пеленгационного приемного устройства и группа его выходов соответственно соединены: через блок определения центра пачки с входом блока элементов совпадения и с группой входов этого блока, имеющего группу выходов, соединенную с группой входов постоянного запоминающего устройства, а выход блока фиксации перемещения луча соединен с входом счетчика, отличается тем, что вводятся: датчик азимутальных меток с секундным разрешением и счетчик меток, при этом выход датчика азимутальных меток с секундным разрешением соединен с первым входом счетчика меток, имеющего второй вход, соединенный с выходом блока фиксации перемещения луча, счетчик меток имеет группу выходов, соединенную с первой группой входов вычитателя, вторая и третья группы входов которого соответственно соединены с группой выходов счетчика и с группой выходов постоянного запоминающего устройства. Техническим результатом изобретения является обеспечение точности определения дальности без использования сложных узлов. 1 ил.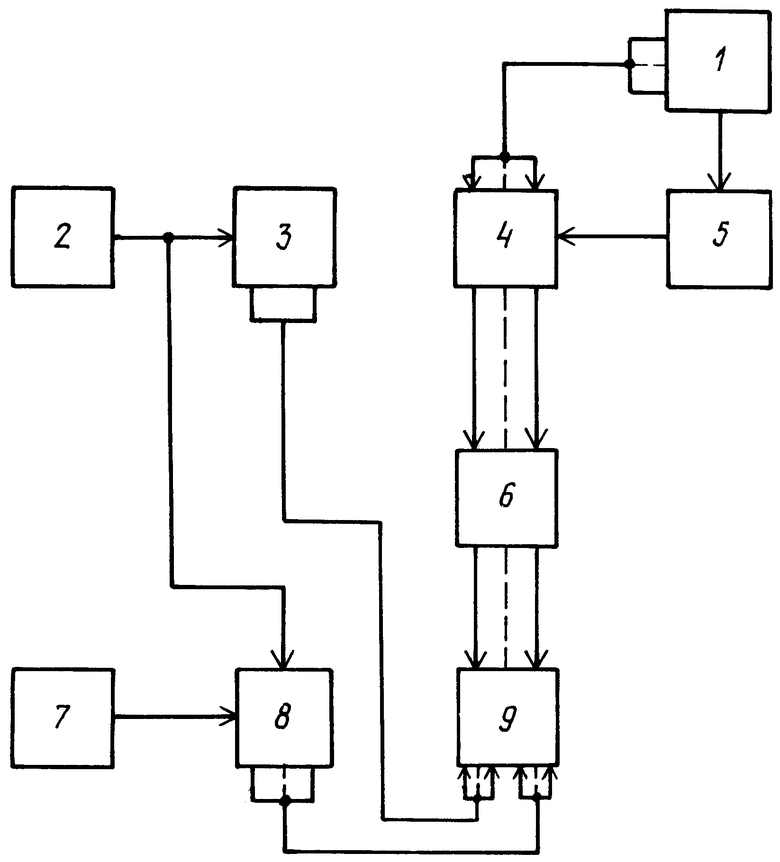
Устройство обработки радиолокационных сигналов, состоящее из пеленгационного приемного устройства, блока фиксации перемещения луча, счетчика, блока определения центра пачки, блока элементов совпадения, постоянного запоминающего устройства и вычитателя, где отдельный выход пеленгационного приемного устройства и группа его выходов соответственно соединены через блок определения центра пачки с входом блока элементов совпадения и с группой входов этого блока, имеющего группу выходов, соединенную с группой входов постоянного запоминающего устройства, а выход блока фиксации перемещения луча соединен с входом счетчика, отличающееся тем, что вводятся: датчик азимутальных меток с секундным разрешением и счетчик меток, при этом выход датчика азимутальных меток с секундным разрешением соединен с первым входом счетчика меток, имеющего второй вход, соединенный с выходом блока фиксации перемещения луча, причем счетчик меток имеет группу выходов, соединенную с первой группой входов вычитателя, вторая и третья группы входов которого соответственно соединены с группой выходов счетчика и с группой выходов постоянного запоминающего устройства.
| RU 2006131746 A, 20.05.2008 | |||
| РАДИОЛОКАТОР | 2008 |
|
RU2402039C2 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2005 |
|
RU2285933C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2005 |
|
RU2279690C1 |
| РАДИОЛОКАТОР | 2008 |
|
RU2366970C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2008 |
|
RU2390037C1 |
| Агрегат для производства изделий из бетонных смесей | 1980 |
|
SU1093564A1 |
| US 5168277 A, 01.12.1992. | |||

