Изобретение относится к электротехнике и может использоваться в электроприводах с упругой механической связью между двигателем и механизмом.
Наиболее близким к заявляемому является устройство управления электродвигателем постоянного тока и упруго связанным с ним механизмом, по авторскому свидетельству N 1704261, кл.H 02 P 5/06, которое принимается за прототип.
Прототип содержит электродвигатель постоянного тока, подключенный к тиристорному силовому блоку и упруго связанный с механизмом, последовательно соединенные задатчик частоты вращения (ЧВ), регулятор ЧВ, регулятор упругого момента и систему формирования импульсов, выход которой подключен к входу тиристорного силового блока, первый пропорциональный (П) блок, датчик тока, датчик ЧВ электродвигателя и датчик ЧВ механизма.
При эксплуатации прототипа обнаружены следующие недостатки:
1. Низкая помехозащищенность, обусловленная наличием дифференцирующих блоков в прямом канале регулирования и цепях корректирующих обратных связей (ОС).
2. Сложность настройки, обусловленная наличием четырех контуров регулирования.
3. Невысокое качество регулирования из-за невозможности выполнения операции идеального дифференцирования дифференцирующими блоками прямого канала регулирования и цепей корректирующих ОС.
Заявляемое устройство управления электродвигателем постоянного тока и упруго связанным с ним механизмом направлено на решение следующих задач:
1. Повышение помехозащищенности устройства управления электродвигателем постоянного тока и упруго связанным с ним механизмом.
2. Упрощение настройки устройства управления электродвигателем постоянного тока и упруго связанным с ним механизмом.
3. Повышение качества регулирования ЧВ механизма.
Указанный технический результат достигается тем, что в известное устройство управления электродвигателем постоянного тока и упруго связанным с ним механизмом введены фильтр, включенный между выходом задатчика ЧВ и первым входом регулятора ЧВ, датчик напряжения, второй П блок, третий П блок, четвертый П блок и пятый П блок, причем выходы первого и второго П блоков соединены соответственно с шестым входом регулятора ЧВ и пятым входом регулятора упругого момента, а входы подключены к выходу третьего П блока, вход которого подключен к выходам датчика напряжения, четвертого и пятого П блоков, входы четвертого и пятого П блоков подключены к выходам датчиков соответственно тока и ЧВ электродвигателя, первый апериодический блок, шестой П блок, седьмой П блок, восьмой П блок, причем выходы первого апериодического блока и шестого П блока соединены соответственно с пятым входом регулятора ЧВ и четвертым входом регулятора упругого момента, а входы подключены к выходу седьмого П блока, выход восьмого П блока соединен с первым входом седьмого П блока, а вход подключен к выходу датчика тока, второй апериодический блок, первый интегрирующий блок, девятый П блок, десятый П блок, одиннадцатый П блок, причем входы десятого П блока соединены с выходами датчиков ЧВ электродвигателя и механизма, а выход подключен к входам первого интегрирующего блока и одиннадцатого П блока, выход которого подключен к второму входу регулятора упругого момента, выход первого интегрирующего блока подключен к входам девятого П блока, второго апериодического блока и второму входу седьмого П блока, выходы девятого П блока и второго апериодического блока подключены соответственно к третьему входу регулятора упругого момента и четвертому входу регулятора ЧВ, двенадцатый П блок, тринадцатый П блок, четырнадцатый П блок и второй интегрирующий блок, причем выход двенадцатого П блока подключен к третьему входу регулятора ЧВ, а вход соединен с выходом четырнадцатого П блока, вход которого соединен с выходом датчика ЧВ механизма и вторым выходом второго интегрирующего блока, выход тринадцатого П блока подключен к второму входу регулятора ЧВ, а вход соединен с первым выходом второго интегрирующего блока, вход которого соединен с выходом четырнадцатого П блока.
Таким образом, введение фильтра, регулятора упругого момента, датчика напряжения и названных блоков корректирующих ОС позволило получить передаточные функции контуров регулирования упругого момента и ЧВ заявляемого устройства в виде:
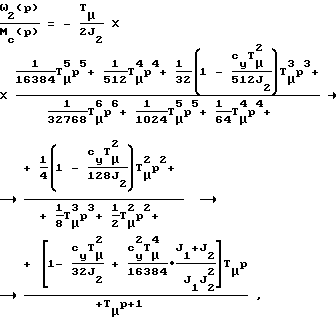
где Uзму(p); Uзчв(p) задающее напряжение контуров регулирования соответственно упругого момента и ЧВ;
kому; kочв коэффициенты ОС соответственно по упругому моменту и ЧВ;
Mу(p) упругий момент;
Mс(p) момент сопротивления;
J1 момент инерции электродвигателя;
J2 приведенный момент инерции механизма;
cy приведенный коэффициент жесткости;
Tμ некомпенсированная постоянная времени.
Полученные передаточные функции свидетельствуют о том, что заявляемое устройство обеспечивает повышение качества регулирования ЧВ механизма.
На фиг. 1 представлена структурная схема устройства управления электродвигателем постоянного тока и упруго связанным с ним механизмом.
Устройство содержит электродвигатель 1 постоянного тока, подключенный к тиристорному силовому блоку 2 и связанный посредством упругой механической передачи с механизмом, последовательно соединенные задатчик 3 ЧВ, фильтр 4, регулятор 5 ЧВ, регулятор 6 упругого момента и систему 7 формирования импульсов, выход которой подключен к входу тиристорного силового блока 2, датчик 8 напряжения, датчик 9 тока, датчик 10 ЧВ электродвигателя, датчик 11 ЧВ механизма, выходы которых посредством отрицательных жестких и гибких ОС подключены к входам регулятора 5 ЧВ и регулятора 6 упругого момента. Устройство содержит первый П блок 12, второй П блок 13, третий П блок 14, четвертый П блок 15, пятый П блок 16, причем выходы первого П блока 12 и второго П блока 13 соединены соответственно с шестым входом регулятора 5 ЧВ и пятым входом регулятора 6 упругого момента, а входы подключены к выходу третьего П блока 14, вход которого подключен к выходам датчика 8 напряжения, четвертого П блока 15 и пятого П блока 16, входы четвертого П блока 15 и пятого П блока 16 подключены к выходам соответственно датчика 9 тока и датчика 10 ЧВ электродвигателя, первый апериодический блок 17, шестой П блок 18, седьмой П блок 19, восьмой П блок 20, причем выходы первого апериодического блока 17 и шестого П блока 1 соединены соответственно с пятым входом регулятора 5 ЧВ и четвертым входом регулятора 6 упругого момента, а входы подключены к выходу седьмого П блока 19, выход восьмого П блока 20 соединен с первым входом седьмого П блока 19, а вход подключен к выходу датчика 9 тока, второй апериодический блок 21, первый интегрирующий блок 22, девятый П блок 23, десятый П блок 24, одиннадцатый П блок 25, причем входы десятого П блока 24 соединены с выходами датчика 10 ЧВ электродвигателя и датчика 11 ЧВ механизма, а выход подключен к входам первого интегрирующего блока 22 и одиннадцатого П блока 25, выход которого подключен к второму входу регулятора 6 упругого момента, выход первого интегрирующего блока 22 подключен к входам девятого П блока 23, второго апериодического блока 21 и второму входу седьмого П блока 19, выходы девятого П блока 23 и второго апериодического блока 21 подключены соответственно к третьему входу регулятора 6 упругого момента и четвертому входу регулятора 5 ЧВ, двенадцатый П блок 26, тринадцатый П блок 27, второй интегрирующий блок 28 и четырнадцатый П блок 29, причем выход двенадцатого П блока 26 подключен к третьему входу регулятора 5 ЧВ, а вход соединен с выходом четырнадцатого П блока 29, вход которого соединен с выходом датчика 11 ЧВ механизма и вторым выходом второго интегрирующего блока 28, выход тринадцатого П блока 27 подключен к второму регулятору 5 ЧВ, а вход соединен с первым выходом второго интегрирующего блока 28, вход которого соединен с выходом четырнадцатого П блока 29.
Устройство управления электродвигателем постоянного тока и упруго связанным с ним механизмом работает следующим образом.
Сигнал с задатчика 3 ЧВ, проходя через фильтр 4, поступает на первый вход регулятора 5 ЧВ, на другие входы которого поступают сигналы отрицательных жестких ОС по напряжению, току и ЧВ механизма, а также сигналы отрицательных гибких ОС по току и ЧВ двигателя и механизма. Регулятор 5 ЧВ выполнен в виде пропорционально-интегрального блока с ограничением выходного сигнала и совместно с блоками 12, 14 17, 19 22, 24, 26 29 указанных ОС формирует зависимость ЧВ механизма от времени w2(t) Сигнал с выхода регулятора 5 ЧВ поступает на первый вход регулятора 6 упругого момента, на другие входы которого поступают сигналы отрицательных жестких ОС по току, ЧВ двигателя и механизма, гибких ОС по ЧВ двигателя и механизма. Регулятор 6 упругого момента выполнен в виде пропорционально-интегрального блока и совместно с блоками 13 16, 18 20, 22 25 указанных ОС формирует зависимость упругого момента от времени My(t). Сигнал с выхода регулятора 6 упругого момента поступает на вход системы 7 формирования импульсов, которая подает импульсы на открытие тиристоров в тиристорном силовом блоке 8. Время подачи импульсов, а следовательно, и напряжение на якорной обмотке определяются значением сигнала на выходе регулятора 6 упругого момента.
Таким образом, зависимости ЧВ механизма и упругого момента от времени определяются положением задатчика ЧВ, настройкой регуляторов ЧВ и упругого момента и блоков корректирующих ОС.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 1998 |
|
RU2158467C2 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1996 |
|
RU2096903C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1998 |
|
RU2158468C2 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА КРАНА | 2002 |
|
RU2239277C2 |
| ЭЛЕКТРОПРИВОД АСТАТИЧЕСКИЙ ПЕРВОГО ПОРЯДКА | 2002 |
|
RU2237343C1 |
| ПРОГРАММНО-УПРАВЛЯЕМЫЙ ПОЗИЦИОННЫЙ ЭЛЕКТРОПРИВОД С УЛУЧШЕННЫМИ ХАРАКТЕРИСТИКАМИ НА БАЗЕ ИНЕРЦИОННОГО ПРЕОБРАЗОВАТЕЛЯ ПРИ ИДЕАЛЬНОМ ВАЛОПРОВОДЕ | 2011 |
|
RU2455749C1 |
| МИКРОПОЗИЦИОННЫЙ ПРОГРАММНО-УПРАВЛЯЕМЫЙ ЭЛЕКТРОПРИВОД С УПРУГИМ ВАЛОПРОВОДОМ | 2008 |
|
RU2350009C1 |
| ПРОГРАММНО-УПРАВЛЯЕМЫЙ ПОЗИЦИОННЫЙ ЭЛЕКТРОПРИВОД С УЛУЧШЕННЫМИ ХАРАКТЕРИСТИКАМИ НА БАЗЕ ИНЕРЦИОННОГО ПРЕОБРАЗОВАТЕЛЯ ПРИ УПРУГОМ ВАЛОПРОВОДЕ | 2011 |
|
RU2464696C1 |
| ПРОГРАММНО-УПРАВЛЯЕМЫЙ ЭЛЕКТРОПРИВОД С УПРУГИМ ВАЛОПРОВОДОМ | 2008 |
|
RU2393620C1 |
| Электропривод постоянного тока | 1989 |
|
SU1760622A1 |
Использование: в электроприводах с упругой механической связью между двигателем и механизмом. Сущность: в известное устройство управления электродвигателем постоянного тока и упруго связанным с ним механизмом, содержащее электродвигатель постоянного тока, подключенный к тиристорному силовому блоку и упруго связанный с механизмом, последовательно соединенные задатчик частоты вращения, регулятор частоты вращения, регулятор упругого момента и систему формирования импульсов, выход которой подключен к входу тиристорного силового блока, первый пропорциональный блок, датчик тока, датчик частоты вращения электродвигателя и датчик частоты вращения механизма, введены фильтр, датчик напряжения, два апериодических, два интегрирующих и тринадцать пропорциональных блоков. Технический результат, который может быть получен при осуществлении изобретения, выражается в улучшении качества регулирования частоты вращения механизма. 1 ил.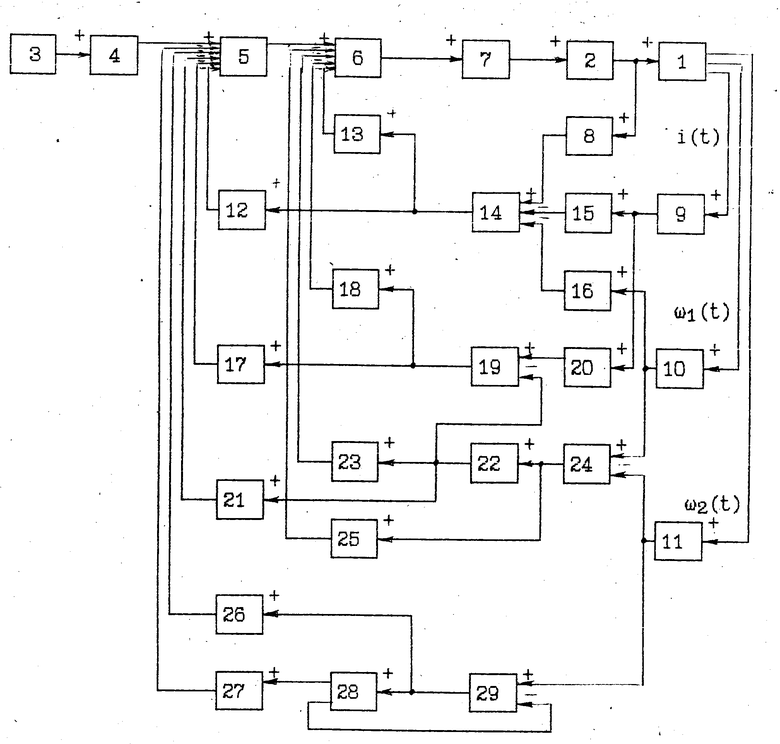
Устройство управления электродвигателем постоянного тока и упруго связанным с ним механизмом, содержащее электродвигатель постоянного тока, подключенный к тиристорному силовому блоку и упруго связанный с механизмом, последовательно соединенные задатчик частоты вращения, регулятор частоты вращения, регулятор упругого момента и систему формирования импульсов, выход которой подключен к входу тиристорного силового блока, первый пропорциональный блок, датчик тока, датчик частоты вращения электродвигателя и датчик частоты вращения механизма, отличающееся тем, что в него введены фильтр, включенный между выходом задатчика частоты вращения и первым входом регулятора частоты вращения, датчик напряжения, второй пропорциональный блок, третий пропорциональный блок, четвертый пропорциональный блок, пятый пропорциональный блок, причем выходы первого и второго пропорциональных блоков соединены соответственно с шестым входом регулятора частоты вращения и пятым входом регулятора упругого момента, а входы подключены к выходу третьего пропорционального блока, входы которого подключены к выходам датчика напряжения, четвертого и пятого пропорциональных блоков, входы четвертого и пятого пропорциональных блоков подключены к выходам датчиков соответственно тока и частоты вращения электродвигателя, первый апериодический блок, шестой пропорциональный блок, седьмой пропорциональный блок, восьмой пропорциональный блок, причем выходы первого апериодического блока и шестого пропорционального блока соединены соответственно с пятым входом регулятора частоты вращения и четвертым входом регулятора упругого момента, а входы подключены к выходу седьмого пропорционального блока, выход восьмого пропорционального блока соединен с первым входом седьмого пропорционального блока, а вход подключен к выходу датчика тока, второй апериодический блок, первый интегрирующий блок, девятый пропорциональный блок, десятый пропорциональный блок, одиннадцатый пропорциональный блок, причем входы десятого пропорционального блока соединены с выходами датчиков частоты вращения электродвигателя и механизма, а выход подключен к входам первого интегрирующего блока и одиннадцатого пропорционального блока, выход которого подключен к второму входу регулятора упругого момента, выход первого интегрирующего блока подключен к входам девятого пропорционального блока, второго апериодического блока и второму входу седьмого пропорционального блока, выходы девятого пропорционального блока и второго апериодического блока подключены соответственно к третьему входу регулятора упругого момента и четвертому входу регулятора частоты вращения, двенадцатый пропорциональный блок, тринадцатый пропорциональный блок, четырнадцатый пропорциональный блок и второй интегрирующий блок, причем выход двенадцатого пропорционального блока подключен к третьему входу регулятора частоты вращения, а вход соединен с выходом четырнадцатого пропорционального блока, вход которого соединен с выходом датчика частоты вращения механизма и вторым выходом второго интегрирующего блока, выход тринадцатого пропорционального блока подключен к второму входу регулятора частоты вращения, а вход соединен с первым выходом второго интегрирующего блока, вход которого соединен с выходом четырнадцатого пропорционального блока.
| Устройство для управления электродвигателем постоянного тока и упруго связанные с ним механизмом с переменным моментом инерции | 1989 |
|
SU1704261A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
