Изобретение относится к электротехнике и может использоваться в электроприводах постоянного тока, к которым предъявляются следующие требования: отсутствие статической ошибки регулирования тока и частоты вращения (ЧВ); минимальная ошибка регулирования ЧВ при отработке управляющего сигнала; максимальное быстродействие контуров регулирования тока и ЧВ; минимальная динамическая ошибка регулирования ЧВ при ступенчатом внешнем воздействии по нагрузке.
Наиболее близким к заявляемому устройству является устройство управления электродвигателем постоянного тока (называемое двукратноинтегрирующей CAP частоты вращения электропривода постоянного тока) /1/, которое принимается за прототип.
Прототип содержит электродвигатель постоянного тока, подключенный к тиристорному силовому блоку и соединенный с механизмом, последовательно соединенные задатчик ЧВ и фильтр, последовательно соединенные регулятор ЧВ, регулятор тока и систему формирования импульсов, выход которой подключен к входу тиристорного силового блока, датчик тока, датчик ЧВ.
При эксплуатации прототипа обнаружены следующие недостатки:
1. Статическая ошибка регулирования тока, обусловленная влиянием обратной связи по ЭДС электродвигателя.
2. Значительная ошибка регулирования ЧВ при отработке управляющего сигнала.
3. Низкое быстродействие контуров регулирования тока и ЧВ.
4. Значительная динамическая ошибка регулирования ЧВ при ступенчатом внешнем воздействии по нагрузке.
Задача, решаемая изобретением, заключается в устранении статической ошибки регулирования тока, уменьшении ошибки регулирования ЧВ при отработке управляющего сигнала, увеличении быстродействия контуров регулирования тока и ЧВ, уменьшении динамической ошибки регулирования ЧВ при ступенчатом внешнем воздействии по нагрузке.
Техническим результатом от использования изобретения является улучшение качества управления электродвигателем постоянного тока.
Указанный технический результат достигается тем, что в известное устройство управления электродвигателем постоянного тока введены датчик напряжения, первый апериодический (А) блок, включенный между выходом фильтра и первым входом регулятора ЧВ, интегрирующий блок, вход которого соединен с выходом регулятора тока, а выход подключен к второму входу системы формирования импульсов, первый пропорциональный (П) блок, второй П блок, третий П блок, причем входы первого и второго П блоков соединены с выходами соответственно датчиков тока и ЧВ, а их выходы соединены соответственно с вторым и третьим входами третьего П блока, первый вход которого соединен с выходом датчика напряжения, а выход подключен к четвертому входу регулятора тока, первый инерционно-дифференцирующий (ИД) блок и второй А блок, входы которых соединены с выходом датчика тока, а выходы подключены соответственно к третьему и второму входам регулятора тока, второй ИД блок, третий ИД блок, третий А блок и четвертый А блок, причем вход второго ИД блока соединен с выходом датчика ЧВ, а выход соединен с входом третьего ИД блока и первым входом четвертого А блока, выход третьего ИД блока подключен к третьему входу регулятора ЧВ, вход третьего А блока соединен с выходом датчика ЧВ, а выход соединен с вторым входом четвертого А блока, выход которого подключен к второму входу регулятора ЧВ.
Таким образом, введение первого А блока, интегрирующего блока, датчика напряжения и названных блоков корректирующих обратных связей позволило получить передаточные функции контуров регулирования тока и ЧВ по управляющему и возмущающему воздействиям заявляемого устройства в виде:
где IЯ - ток якорной цепи электродвигателя;
UЗТ - задающее напряжение контура регулирования тока;
kот - коэффициент обратной связи по току;
Tμ - некомпенсированная постоянная времени;
p - комплексный параметр преобразования Лапласа;
MС - момент сопротивления;
cе; cм - коэффициенты электродвигателя;
LЯ - индуктивность якорной цепи электродвигателя;
J - момент инерции электропривода;
ω - ЧВ электропривода;
UЗЧВ - задающее напряжение контура регулирования ЧВ;
kОЧВ - коэффициент обратной связи по ЧВ.
Передаточной функции контура регулирования тока по каналу управления "задающее напряжение контура тока - ток якорной цепи электродвигателя" соответствует максимально плоская амплитудно-частотная характеристика, т.е. данный контур отрабатывает управляющий сигнал с минимально возможной ошибкой.
Передаточной функции контура регулирования ЧВ по каналу управления "задающее напряжение контура ЧВ - ЧВ электропривода" соответствует максимально плоская амплитудно-частотная характеристика, т.е. данный контур отрабатывает управляющий сигнал с минимально возможной ошибкой.
Следовательно, достигнуты нулевая статическая ошибка регулирования тока и минимально возможная ошибка регулирования ЧВ при отработке управляющего сигнала, увеличено быстродействие контуров регулирования тока и ЧВ соответственно в два и восемь раз, уменьшена динамическая ошибка регулирования ЧВ при ступенчатом внешнем воздействии по нагрузке в десять раз. Кроме того, заявленное устройство, как и прототип, обладает нулевой статической ошибкой регулирования ЧВ.
Таким образом, заявленное устройство улучшает качество управления электродвигателем постоянного тока.
На фиг. 1 представлена структурная схема устройства управления электродвигателем постоянного тока.
Устройство управления электродвигателем постоянного тока содержит электродвигатель 1 постоянного тока, подключенный к тиристорному силовому блоку 2 и соединенный с механизмом, последовательно соединенные задатчик 3 ЧВ, фильтр 4, выполненный в виде А блока, первый А блок 5, регулятор 6 ЧВ, выполненный в виде пропорционально-интегрирующего (ПИ) блока, регулятор 7 тока, выполненный в виде ПИ блока, интегрирующий блок 9, вход которого соединен с выходом регулятора 7 тока, а выход подключен к второму входу системы 8 формирования импульсов, выход которой подключен к входу тиристорного силового блока 2, датчик 10 напряжения, датчик 11 тока, датчик 12 ЧВ, первый П блок 13, второй П блок 14, третий П блок 15, причем входы первого П блока 13 и второго П блока 14 соединены с выходами соответственно датчика 11 тока и датчика 12 ЧВ, а их выходы соединены соответственно с вторым и третьим входами третьего П блока 15, первый вход которого соединен с выходом датчика 10 напряжения, а выход подключен к четвертому входу регулятора 7 тока, первый ИД блок 16, второй А блок 17, входы которых соединены с выходом датчика 11 тока, а выходы подключены соответственно к третьему и второму входам регулятора 7 тока, второй ИД блок 18, третий ИД блок 19, третий А блок 20, четвертый А блок 21, причем вход второго ИД блока 18 соединен с выходом датчика 12 ЧВ, а выход соединен с входом третьего ИД блока 19 и первым входом четвертого А блока 21, выход третьего ИД блока 19 подключен к третьему входу регулятора 6 ЧВ, вход третьего А блока 20 соединен с выходом датчика 12 ЧВ, а выход соединен с вторым входом четвертого А блока 21, выход которого подключен к второму входу регулятора 6 ЧВ.
Устройство управления электродвигателем постоянного тока работает следующим образом.
Сигнал с выхода задатчика 3 ЧВ, проходя через фильтр 4 и первый А блок 5, поступает на первый вход регулятора 6 ЧВ, на другие входы которого поступают сигналы гибких отрицательных обратных связей по ЧВ. Регулятор 6 ЧВ совместно с блоками 18 - 21 указанных обратных связей формирует зависимость ЧВ электропривода от времени ω (t). Сигнал с выхода регулятора 6 ЧВ поступает на первый вход регулятора 7 тока, на другие входы которого поступают сигналы жестких отрицательных обратных связей по напряжению, току якорной цепи и ЧВ, а также сигналы гибких отрицательных обратных связей по току якорной цепи. Регулятор 7 тока совместно с блоками 13-17 указанных обратных связей формирует зависимость тока якорной цепи от времени IЯ(t). Сигналы с выхода регулятора 7 тока и интегрирующего блока 9 поступают соответственно на первый и второй входы системы 8 формирования импульсов, которая подает импульсы на открытие тиристоров тиристорного силового блока 2. Время подачи импульсов, а следовательно, и напряжение, приложенное к якорной цепи электродвигателя, определяются значением сигналов на выходе регулятора 7 тока и интегрирующего блока 9.
Таким образом, качество управления электродвигателем постоянного тока определяется настройкой регуляторов тока и ЧВ, фильтра, первого А блока, интегрирующего блока и блоков корректирующих обратных связей.
ЛИТЕРАТУРА
1. Справочник по проектированию автоматизированного электропривода и систем управления технологическими процессами/ Под ред. В.И.Круповича, Ю.Г. Барыбина, М. Л.Самовера.- 3-е изд. перераб. и доп.- М.: Энергоиздат, 1982.- 422 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1998 |
|
RU2158468C2 |
| ЭЛЕКТРОПРИВОД АСТАТИЧЕСКИЙ ПЕРВОГО ПОРЯДКА | 2002 |
|
RU2237343C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА И УПРУГО СВЯЗАННЫМ С НИМ МЕХАНИЗМОМ | 1996 |
|
RU2096904C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1996 |
|
RU2096903C1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА КРАНА | 2002 |
|
RU2239277C2 |
| ПРОГРАММНО-УПРАВЛЯЕМЫЙ ПОЗИЦИОННЫЙ ЭЛЕКТРОПРИВОД С УЛУЧШЕННЫМИ ХАРАКТЕРИСТИКАМИ НА БАЗЕ ИНЕРЦИОННОГО ПРЕОБРАЗОВАТЕЛЯ ПРИ ИДЕАЛЬНОМ ВАЛОПРОВОДЕ | 2011 |
|
RU2455749C1 |
| МИКРОПОЗИЦИОННЫЙ ПРОГРАММНО-УПРАВЛЯЕМЫЙ ЭЛЕКТРОПРИВОД С УПРУГИМ ВАЛОПРОВОДОМ | 2008 |
|
RU2350009C1 |
| ПРОГРАММНО-УПРАВЛЯЕМЫЙ ПОЗИЦИОННЫЙ ЭЛЕКТРОПРИВОД С УЛУЧШЕННЫМИ ХАРАКТЕРИСТИКАМИ НА БАЗЕ ИНЕРЦИОННОГО ПРЕОБРАЗОВАТЕЛЯ ПРИ УПРУГОМ ВАЛОПРОВОДЕ | 2011 |
|
RU2464696C1 |
| ПРОГРАММНО-УПРАВЛЯЕМЫЙ ЭЛЕКТРОПРИВОД С УПРУГИМ ВАЛОПРОВОДОМ | 2008 |
|
RU2393620C1 |
| ПРОГРАММНО-УПРАВЛЯЕМЫЙ ЭЛЕКТРОПРИВОД С ИДЕАЛЬНЫМ ВАЛОПРОВОДОМ | 2008 |
|
RU2370878C1 |
Изобретение относится к электротехнике и может использоваться в электроприводах постоянного тока. В известное устройство управления электродвигателем постоянного тока (называемое двукратноинтегрирующей CAP частоты вращения электропривода постоянного тока), содержащее датчики тока и частоты вращения, введены датчик напряжения, четыре апериодических блока, интегрирующий блок, три пропорциональных блока и три инерционно-дифференцирующих блока. Технический результат: достижение нулевой статической ошибки регулирования тока; достижение минимально возможной ошибки регулирования ЧВ при отработке управляющего сигнала; увеличение быстродействия контуров регулирования тока и ЧВ соответственно в два и восемь раз; уменьшение динамической ошибки регулирования ЧВ при ступенчатом внешнем воздействии по нагрузке в десять раз. Кроме того, заявленное устройство, как и прототип, обладает нулевой статической ошибкой регулирования ЧВ. 1 ил.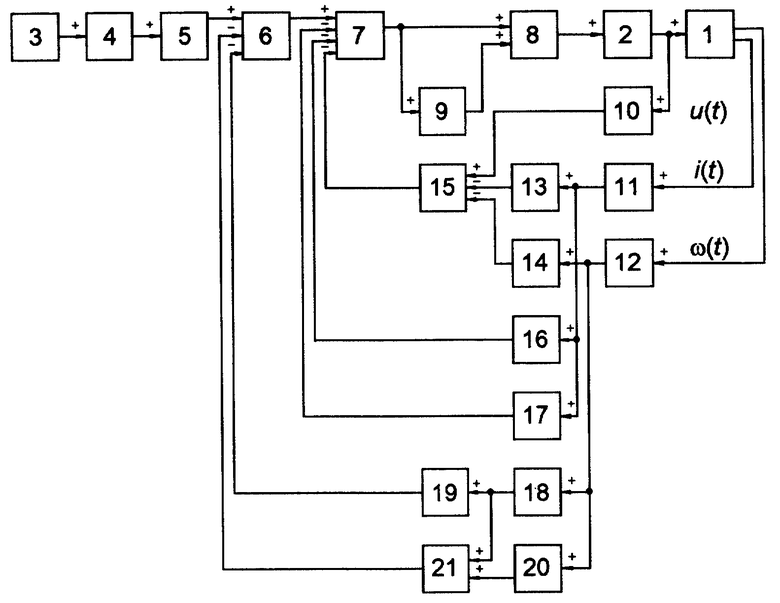
Устройство управления электродвигателем постоянного тока, содержащее электродвигатель постоянного тока, подключенный к тиристорному силовому блоку и соединенный с механизмом, последовательно соединенные задатчик частоты вращения и фильтр, выполненный в виде апериодического блока, последовательно соединенные регулятор частоты вращения, выполненный в виде пропорционально-интегрирующего блока, регулятор тока, выполненный в виде пропорционально-интегрирующего блока, и систему формирования импульсов, подающую импульсы на открытие тиристоров тиристорного силового блока, выход которой подключен к входу тиристорного силового блока, датчик тока, датчик частоты вращения, отличающееся тем, что в него введены датчик напряжения, первый апериодический блок, включенный между выходом фильтра и первым входом регулятора частоты вращения, интегрирующий блок, вход которого соединен с выходом регулятора тока, а выход подключен к второму входу системы формирования импульсов, причем время подачи импульсов, а следовательно, и напряжение, приложенное к якорной цепи электродвигателя, определяются значениями сигналов на выходах регулятора тока и интегрирующего блока, первый пропорциональный блок, второй пропорциональный блок, третий пропорциональный блок, реализующие, совместно с датчиками напряжения, тока и частоты вращения, жесткие отрицательные обратные связи по напряжению, току якорной цепи и частоте вращения, причем входы первого и второго пропорциональных блоков соединены с выходами соответственно датчиков тока и частоты вращения, а их выходы соединены соответственно с вторым и третьим входами третьего пропорционального блока, первый вход которого соединен с выходом датчика напряжения, а выход подключен к четвертому входу регулятора тока, первый инерционно-дифференцирующий блок и второй апериодический блок, реализующие, совместно с датчиком тока, гибкие отрицательные обратные связи по току якорной цепи, входы которых соединены с выходом датчика тока, а выходы подключены соответственно к третьему и второму входам регулятора тока, второй инерционно-дифференцирующий блок, третий инерционно-дифференцирующий блок, третий апериодический блок и четвертый апериодический блок, реализующие, совместно с датчиком частоты вращения, гибкие отрицательные обратные связи по частоте вращения, причем вход второго инерционно-дифференцирующего блока соединен с выходом датчика частоты вращения, а выход соединен с входом третьего инерционно-дифференцирующего блока и первым входом четвертого апериодического блока, выход третьего инерционно-дифференцирующего блока подключен к третьему входу регулятора частоты вращения, вход третьего апериодического блока соединен с выходом датчика частоты вращения, а выход соединен с вторым входом четвертого апериодического блока, выход которого подключен к второму входу регулятора частоты вращения.
| Справочник по проектированию автоматизированного электропривода и систем управления технологическими процессами /Под ред | |||
| Круповича В.И | |||
| и др | |||
| - М.: Энергоиздат, 1982, с | |||
| Аппарат для передачи фотографических изображений на расстояние | 1920 |
|
SU170A1 |
| RU 2066087 C1, 27.08.1996 | |||
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1996 |
|
RU2096903C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ КАТОДА ДЛЯ CO -ЛАЗЕРА | 1992 |
|
RU2042223C1 |
| Способ сжигания жидкого топлива и горелочное устройство | 1986 |
|
SU1386797A1 |
| US 3599062, 10.08.1971 | |||
| US 3671828, 20.06.1972 | |||
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| DE 3722099 A1, 28.01.1988. | |||
