Изобретение относится к медицинской технике, в частности к хирургическим манипуляторам и может быть использовано в экспериментальной хирургии при проектировании и разработке инструментария для проведения внутриполосных, преимущественно эндоскопических операций.
Успешный результат осуществления любого хирургического вмешательства в значительной степени определяется качеством хирургического инструментария. Особенно это касается различных приспособлений, применяемых при проведении операций на труднодоступных частях тела методами абдоминальной хирургии. Эти методы в последние годы открыли пути к реализации малотравматичной хирургии, позволяющей сократить сроки пребывания больных в стационаре, облегчить процесс их реабилитации. Проведение операций предусматривает использование эндоскопической техники, когда и сами хирургические инструменты и средства передачи телевизионного изображения вводятся в зону операции через троакары. Соответственно и манипуляции в зоне операции контролируются хирургами по телевизионному изображению. Является очевидным, что такие операции как холецистэктомия, аппендэктомия, ваготомия, грыжесечение весьма трудоемки и требуют ювелирного мастерства хирургов и совершенного оборудования (см. пример, проспект Техника в эндохирургии. Лапароскопическая холецистэктомия, изд. фирмы "ЭТИКОН Эндо-хирургия" компании "Джонсон и Джонсон", 1992) [1]
Проведение операций под контролем эндоскопа требует использования специальных средств. К ним относятся различные приспособления для разделения слоев тканей или отделения тканей, например, препаровочные зажимы-диссекторы, расширители, зажимы с "мягкими" или "жесткими" браншами. Разрезание тканей проводят специальными ножницами или устройствами со встроенным ножом. С помощью аппликаторов накладывают клипсы, раны закрывают наложением механического шва с помощью сшивающих устройств; используются и другие специализированные устройства.
Устройства для проведения эндохирургических вмешательств, несмотря на многообразие назначений и исполнений, имеют общую особенность, связанную со стремлением к минимальной травматичности для оперируемого. Эта особенность накладывает необходимость конструирования инструментов и приспособлений (и троакаров к ним) с минимально возможным поперечным сечением. Другая особенность состоит в необходимости дистанционного управления положением и функционированием дистального конца манипулятора, оборудованного собственно инструментом (режущим крючком, клипсо- или скребкопостановочным средством, ловушкой для удаляемого органа и пр.). Трансформация формы обеспечивается органами управления, которыми и манипулирует хирург во время операции. По такому принципу построены устройства для проведения эндоскопических операций по патенту США N 4750475, кл. 128-6. A 61 B 1/00 от 1988 [2] патенту США N 5282806 по кл. 606/139, A 61 B 17/00 от 1994 [3] патенту N 5289963 по кл. 227/175, A 61 B 17/00, 1994 [4] патенту США N 5312023 по кл. 227/175. A 61 B 17/068, 1994 [5]
Форма инструмента должна быть приспособлена для манипуляции на определенном органе или группе органов или тканей, сходных по топологии. Указанное предъявляет к инструменту особые требования в части конструктивного исполнения. Так, известны манипуляторы для комбинированной лапароскопии, имеющие корпус, дистальный конец которого изогнут по дуге окружности и дополнительно развернут в пространстве (см. например, авт. св. СССР N 1657154, по кл. A 61 B 10/00, 1991) [6] Размещенные на дистальном конце щипцы приводятся в действие тросовой системой под контролем лапароскопа. Жесткий корпус, однако не дает возможности управлять формой инструмента в ходе операции и даже такая сложная форма инструмента с двойной кривизной не является универсальной для всех абдоминальных применений. В других конструкциях, например, в эндоскопическом хирургическом инструменте [3] корпус, в отличии от конструкции [6] выполнен так, что челюсти щипцов могут вращаться вокруг дистального конца, что придает дополнительную степень свободы для хирурга.
Более широкими функциональными возможностями обладают устройства для лапароскопических вмешательств, позволяющие осуществлять захват и препарирование тканей в поперечном к оси удлиненного корпуса направлении см. [5] а также ЕР N 0592243, по кл; A 61 B 17/28, 1994 [7] На первом этапе при введении в организм через троакар устройство контролируемым образом трансформируется, что обеспечивает атравматичное продвижение его дистального конца в зону операции. На втором этапе, когда осуществляется собственно манипулирование, дистальный конец инструмента может быть подведен в заданном направлении под заданными углами к оперируемому органу с учетом его анатомических особенностей.
Очевидно, что разработке и созданию описанного выше [1 7] и другого специализированного лапароскопического хирургического инструментария предшествует проведение тщательных топологических исследований операционной зоны. Имеется в виду, что форма и геометрические размеры инструмента должны характеризоваться, с одной стороны, оптимальной длиной, желательно минимальной (тремор рук хирурга может "усилиться" в дистальной части по принципу рычага), а с другой стороны такой формой, чтобы обеспечить подведение дистального конца под определенными углами к оперируемому органу с возможностью изменения этих углов в процессе операции.
Поскольку виды эндохирургических вмешательств не исчерпываются вышеприведенными перечнем и для их разработки требуется проектирование новых инструментов и приспособлений, остро стоит вопрос измерений непосредственно в операционной зоне. Для этой цели известен, например, манипулятор для приведения измерений в эндохирургии, и не являющийся собственно хирургическим инструментом (патент США N 5058603, кл. 128/774, A 61 B 5/103, 1991) [8] Он представляет собой вводимые внутрь обследуемой полости перемещаемые в пространстве элементы с нанесенными на их поверхностях рисками-шкалами. Измерительные элементы связаны с дистальным концом манипулятора, а их перемещение осуществляется тягой со стороны проксимального конца манипулятора. В процессе введения элементы трансформируются. Показания шкал считываются с помощью эндоскопа, по этим измерениям делают суждение о топологии оперируемых объектов. Однако конструктивное решение манипулятора не дает возможности приводит измерения в боковых направлениях относительно оси его корпуса.
Наиболее близким по технической сущности и достигаемому результату является устройство для манипуляций в брюшной полости, содержащее корпус, снабженный рукояткой и связанный с одним концом трубчатого элемента. Рабочий орган, образованный подвижным и неподвижным элементами, размещен на другом конце трубчатого элемента посредством осевого шарнира и связан штоком с органами управления, расположенными на рукоятке. На элементах конструкции нанесены шкалы для линейных измерений в виде рисок для исключения влияния оптического обмана при определении истинных размеров органов с помощью эндоскопической системы (авт. св. СССР N 736949, кл. A 61 B 1/00, 1980) [9] Однако конструкция манипулятора имеет ограничения возможности трансформации формы, не позволяет смоделировать форму хирургического инструмента непосредственно в брюшной полости, а кроме того, и не предусматривает средств измерения угловых смещений.
Задачей изобретения является создание манипулятора, выполняющего функции регулируемого шаблона для подбора оптимальной формы хирургического эндоскопического инструментария и приспособлений. Использование манипулятора-шаблона под контролем эндоскопа позволяет моделировать не только оптимальную форму и геометрические размеры, но и "пощупать" инструментом оперируемую ткань, убедиться в правильности намеченной тактики проведения операции. Действующее совместно с эндоскопом, устройство позволяет снять показания о величинах углов и расстояний без извлечения манипулятора из операционной зоны.
Технический результат обеспечивается вследствие того, что устройство для эндоскопических манипуляций, преимущественно для экспериментальной лапароскопии согласно изобретению содержит корпус, снабженный рукояткой и связанный с одним концом трубчатого элемента, удлиненный рабочий орган, образованный подвижным и неподвижным элементами, осевой шарнир привода углового поворота, органы управления рабочим органом, шток, фиксатор, пружину сжатия и измерительные шкалы в виде рисок, нанесенных на внешних поверхностях. Рабочий орган размещен на другом конце трубчатого элемента посредством осевого шарнира и связан штоком с органами управления, расположенными на рукоятке. Устройство снабжено средством для перемещения рабочего органа в направлении его продольной оси и вращения вокруг последней, выполненным в виде телескопического узла, образованного внешней и внутренней трубками, а также привода осевого перемещения и вращения внутренней трубки с шарнирным узлом и направляющей. Одна пара противолежащих концов наружной и внутренней трубок жестко скреплена с корпусным элементом осевого шарнира и неподвижным элементов рабочего органа соответственно а другая пара свободна. Направляющая телескопического узла выполнена в виде стержня, прикрепленного одним концом к внутренней поверхности корпусного элемента шарнира, а другим размещенного в осевом канале в теле неподвижного элемента рабочего органа с возможностью поступательного перемещения и вращения. Привод осевого перемещения и вращения выполнен в виде гибкого вала, одним концом соединенного посредством шарнирного узла с внутренней поверхностью внутренней трубки, а противоположным концом со штоком, другой конец которого присоединен к ручке управления.
Кроме того, подвижный элемент рабочего органа может быть связан с рычагом и закреплен в теле неподвижного элемента посредством осевого соединения и жестко соединен с серьгой, связанной тягой с одним концом троса, другой конец троса прикреплен посредством переходной втулки к первому концу полого штока, размещенного коаксиально штоку привода осевого перемещения и вращения, второй конец полого штока соединен с курком, размещенным на рукоятке. При этом цилиндрическая пружина сжатия установлена на штоке привода осевого перемещения и вращения между тыльной поверхностью курка и опорной втулкой, закрепленной на штоке.
Привод углового поворота рабочего органа в плоскости, перпендикулярной оси шарнира, может быть выполнен в виде гибкой связи, концы которой посредством пломб установлены в глухих отверстиях в теле проушины по обе стороны от осевого отверстия. Средняя часть гибкой связи перекинута через шкив и закреплена на нем, шкив установлен в закрепленной на корпусе втулке с возможностью вращения, причем ось вращения параллельна оси шарнира, и снабжен ручкой.
Фиксатор может быть выполнен в виде стопорного винта, размещенного в корпусе с возможностью взаимодействия со штоком осевого перемещения и вращения.
Кроме того, полый шток и гибкая связь могут быть установлены в полости трубчатого элемента посредством по меньшей мере одной газонепроницаемой опоры, а рабочий орган выполнен в виде захвата по типу челюстей.
Измерительные шкалы для линейных измерений могут быть выполнены в виде концентрических рисок с равным шагом и нанесены на поверхностях трубчатого корпуса, внутренней трубки телескопического узла и штока. Шкалы для проведения угловых измерений могут быть выполнены в виде рисок, нанесенных по образующей цилиндрической поверхности свободного конца наружной трубки телескопического узла, на ручке привода углового поворота, а также на поверхности трубчатого элемента в местах выхода оси шарнира привода углового поворота, при этом опорные штрихи для указанных шкал нанесены на смежных упомянутых конструктивных элементах.
Как уже отмечалось при изложении уровня техники, ограниченность операционного поля и поля зрения эндоскопической телевизионной системы, ограничения на перемещения инструмента в направлениях, перпендикулярных к оси канала троакара, а также анатомические особенности и расположение оперируемого органа по отношению к другим близкорасположенным органам, накладывают особые требования к удобству подвода (подхода) инструмента к оперируемому органу. Для экспериментальных исследований в этой области и служит изобретенный манипулятор. Повторяя в общих чертах конструктивное использование отдельных элементов упомянутых в обзоре уровня техники приспособления, устройство, тем не менее, имеет большее число степеней свободы перемещения рабочего органа и расширенные функциональные возможности. Оно позволяет при неподвижном корпусе поворачивать рабочий орган (в данном случае имитатор инструмента) на угол ±90 градусов в плоскости, проходящей через центральную ось корпуса, изменять длину рабочего органа за счет раздвижения телескопического узла, разворачивать челюсти рабочего органа вокруг центральной оси телескопического узла.
Особенностью устройства является использование шкал, размещенных на внешних поверхностях подвижных элементов. Шкалы дают возможность снять показания расстояний и углов, соответствующих положению рабочего органа непосредственно в операционной полости с привязкой к координатам корпуса. По показаниям, зафиксированным в ходе эксперимента, может быть вновь воспроизведено положение членов устройства, проведено детальное измерение размеров. После этого возможно аналитически описать форму и дать рекомендации по конструированию инструмента с оптимальными линейными и угловыми характеристиками.
На фиг.1 представлен общий вид манипулятора; на фиг.2 укрупненно дистальный конец манипулятора; на фиг.3 механизм перемещения рабочего органа; на фиг. 4 механизм перемещения подвижной челюсти; на фиг.5 механизм углового поворота рабочего органа; на фиг.6 то же, что на фиг.5, вид сверху; на фиг.7 конструкция дистального конца манипулятора в разрезе; на фиг.8 - схема управления манипулятором к описанию работы устройства в динамике.
На фиг.1 представлен общий вид манипулятора. Манипулятор включает корпус 1, рукоятку 2 с органами управления 3 манипулятором. Корпус 1 соединен посредством трубчатого элемента 4 с рабочим органом 5, представляющим собой имитатор рабочего органа проектируемого хирургического инструмента или приспособления. Рабочий орган 5 соединен с трубчатым элементом 4 посредством осевого шарнира 6 приводом углового поворота.
Рабочий орган 5 включает неподвижную 7 и подвижную 8 челюсти, которые присоединены к осевому шарниру 6 через телескопический узел 9, имеющий наружную 10 и выдвижную внутреннюю 11 трубки.
Для приведения в действие телескопического узла 9, обеспечивающего движение и выдвижение, а также поворот челюстей 7 и 8 вокруг центральной оси телескопического узла 9 служит шток 12 с ручкой 13. Для фиксации заданного положения штока 12 имеется стопорный винт 14, размещенный в торцовой стенке 15 корпуса 1. Со стороны рукоятки 2 в корпусе установлен курок 16 для приведения в действие подвижной челюсти 8. На корпусе 1 установлена также рукоятка 17, посредством которой осуществляется поворот рабочего органа 5 в осевом шарнире 6.
Для проведения геометрических измерений и определения положения отдельных элементов манипулятора в пространстве служат реперные шкалы 18, 19 и 20, представляющие собой риски, нанесенные на элементы 4, 12, а также на цилиндрическую поверхность рукоятки 17. Шкалы 18 и 19 представляют собой концентрические риски с равным шагом, а шкала 20 штрихи, нанесенные параллельно образующей цилиндрической поверхности рукоятки 17.
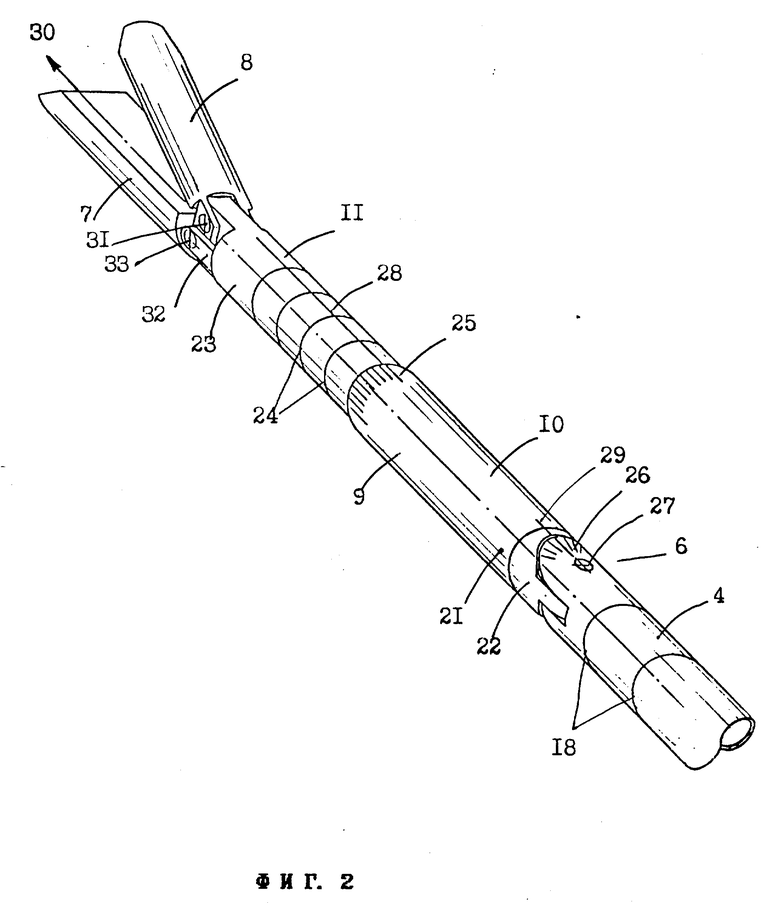
На фиг. 2 укрупненно показан внешний вид рабочего органа 5 с выдвинутой внутренней трубкой 11. Проксимальный конец 21 наружной трубки 10 скреплен с корпусным элементом 22 шарнира 6, дистальный конец 23 внутренней трубки 11 жестко связан с челюстью 7. Внутренняя трубка 11, так же как и элементы 4 и 12, имеет реперную шкалу 24, кроме того, имеются две шкалы для угловых измерений. Одна шкала 25 нанесена на дистальном конце наружной трубки 10 со штрихами, параллельными образующей трубки. Другая шкала 26 образована на внешней поверхности трубчатого элемента 4 в местах выхода оси 27 шарнира 6 и представляет собой риски, размещенные радиально с центром в точке выхода оси 27. Для считывания показаний шкал 25 и 26 имеются опорные штрихи 28 и 29, нанесенные параллельно продольной оси 30 телескопического узла 9.
Подвижная 8 челюсть закреплена на неподвижной 7 челюсти посредством оси 31, а ее перемещение осуществляется тягой 32, присоединенной к подвижной челюсти посредством оси 33.
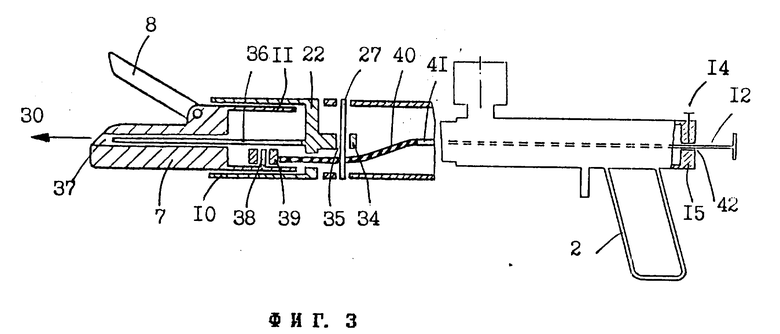
На фиг.3 представлены конструкция и кинематическая схема механизма перемещения рабочего органа 5, обеспечивающего два независимых движения челюстей в пространстве: осевое (возвратно-поступательное в направлении продольной оси 30) и вращательное (вокруг указанной оси 30). Наружная трубка 10 закреплена на оси 27 посредством корпусного элемента 22 с проушиной 34. Проушина 34 имеет отверстие 35 для оси 27 осевого соединения 6.
К внутренней поверхности корпусного элемента 22, противоположной проушине 34, прикреплена направляющая 36. При выдвижении внутренней трубки 11 направляющая скользит внутри канала 37, образованного в теле неподвижной челюсти 7, поддерживая последнюю при ее перемещении в направлении оси 30. Управление перемещением осуществляется посредством штока 12. Для этой цели на внутренней поверхности трубки 11 укреплен штырь 38, на который надета втулка 39, скрепленная с гибким валом 40. Элементы 38 и 39 составляют шарнирный узел. Гибкий вал 40 жестко присоединен к окончанию 41 штока 12. Другой конец штока 12 пропущен через отверстие 42, выполненное в торцовой стенке 15 корпуса 1 со стороны рукоятки 2. В этой же стенке 15 установлен стопорный винт 14, выполняющий функции фиксатора для штока 12.
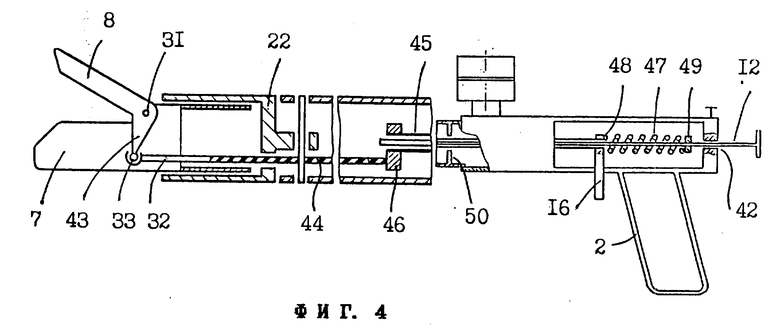
На фиг.4 представлена конструкция и кинематическая схема механизма движения подвижной челюсти 8. Перемещение челюсти 8 осуществляется тягой 32, одним концом связанной с серьгой 43 посредством оси 33, а другим концом с тросом 44. Противоположный конец троса 44 кинематически связан с курком 16 посредством полого штока 45 и переходной втулки 46.
Для поддержания челюсти 8 в нормально открытом состоянии предназначена помещенная на шток 12 винтовая цилиндрическая пружина 47 сжатия. Опорные витки пружины 47 опираются на поверхность 48 курка 16 и на торец опорной втулки 49, закрепленной на штоке 12. Опора 50 скольжения поддерживает шток 45 и обеспечивает его возвратно-поступательное перемещение в осевом направлении. Эта опора 50 скольжения выполняется герметичной для обеспечения функций уплотнителя, препятствуя утечке газа через манипулятор при проведении эндоскопических операций.
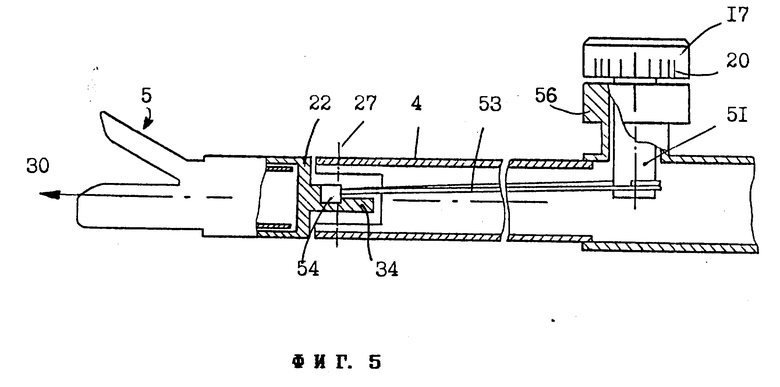
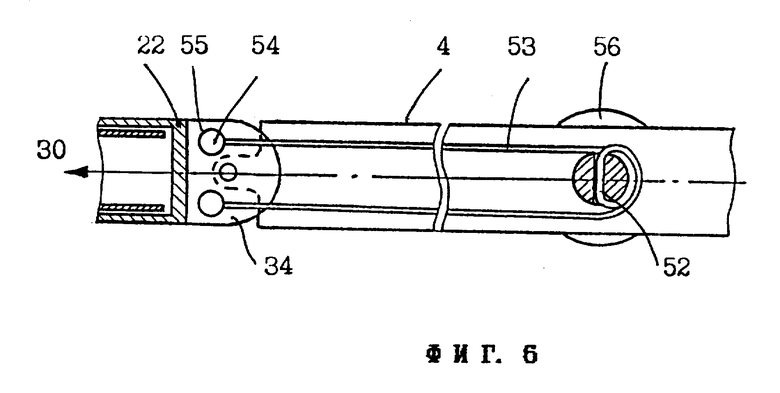
На фиг. 5 и 6 представлена конструкция и кинематическая схема механизма углового поворота рабочего органа 5. Рукоятка 17 соединена со шкивом 51, к которому через поперечное отверстие 52 присоединена гибкая связь 53. Концы гибкой связи 53 закреплены в пломбах 54, установленных в глухих отверстиях 55, выполненных в теле проушины 34. Шкив 51 установлен с возможностью вращения вокруг оси, параллельной оси 27 шарнира, во втулке 56, закрепленной на корпусе 1, что позволяет при повороте рукоятки 17 осуществлять угловое перемещение рабочего органа 5 вокруг оси 27.
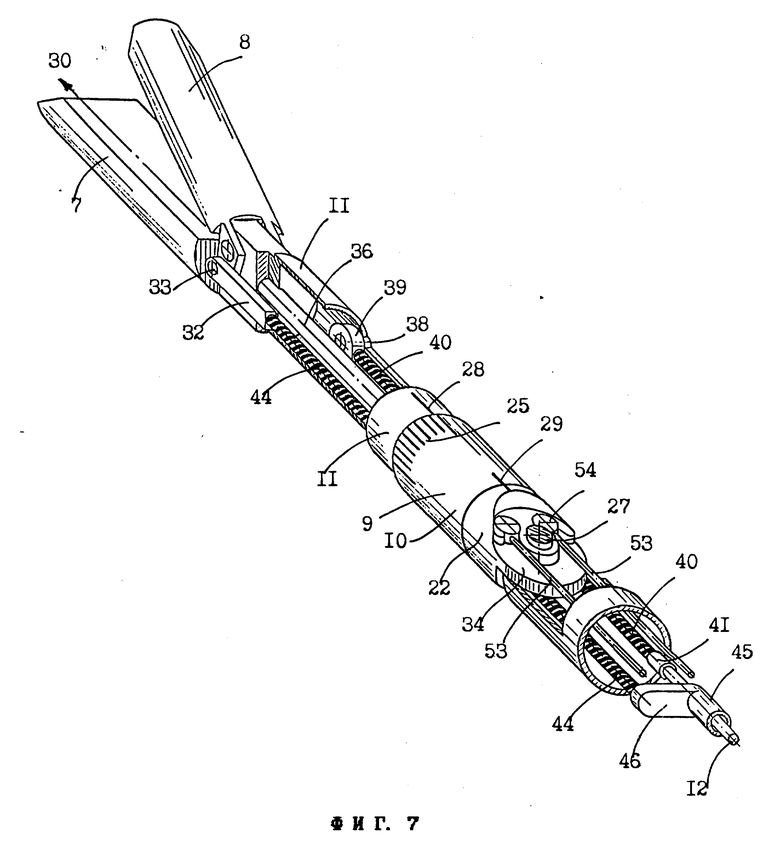
На фиг.7 представлена конструкция дистального конца манипулятора в разрезе. Гибкий вал 40 механизма перемещения рабочего органа и трос 44 механизма перемещения подвижной челюсти размещения по обе стороны по отношению к штоку 36 внутри трубки 11 телескопического узла и пропущены через отверстия в нижней части корпусного элемента 22. Конец троса 44 посредством переходной втулки 46 прикреплен к полому штоку 45, а окончание 41 гибкого вала 40 соединено со штоком 12. Эти элементы управления размещены относительно проушины в нижней части полого корпуса. Гибкие же связи 53 механизма углового поворота также расположены на одном уровне, но в верхней относительно проушины части полого корпуса 4. Такая компоновка позволяет облегчить сборку и наладку устройства.
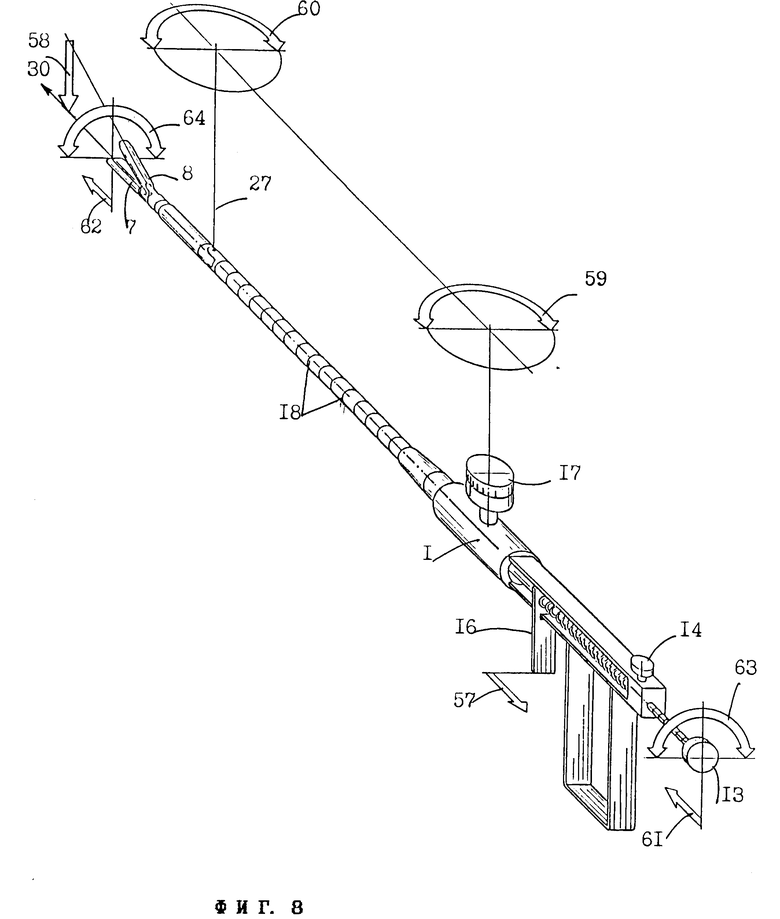
Принцип функционирования устройства поясняется на фиг.8.
При введении манипулятора через троакар (не показан) курок 16 перемещают в направлении, показанном стрелкой 57. При этом подвижная 8 челюсть движется в направлении 58 до смыкания с неподвижной 7 челюстью. При снятии усилия с курка 16 под действием пружины сжатия челюсть 8 возвращается в исходное нормально открытое состояние. Поворот челюстей 5 рабочего органа относительно оси 30 осевого шарнира 6 осуществляют рукояткой 17. Поворачивая рукоятку 17 на заданные углы, показанные стрелкой 59, осуществляют поворот рабочего органа 5 вокруг оси 13, как это показано стрелкой 60. Увеличение длины рабочего органа осуществляется путем поступательного перемещения ручки 13 в направлении, показанном стрелкой 61, при этом телескопический узел раздвигается в направлении 62.
Поворот челюстей вокруг оси 30 в направлении, показанном стрелкой 63, осуществляется при повороте той же ручки 13 вокруг ее оси (по стрелке 64).
Для фиксации осевого (поз. 62) и углового (поз.64) положений рабочего органа 5 служит стопорный винт 14. В застопоренном положении ручки 13 имеется возможность осуществить манипулирование челюстями посредством курка 16, смыкая и раскрывая последние.
Как уже отмечалось выше, предпочтительное использование перенастраиваемого манипулятора состоит в отработке методик эндохирургических вмешательств, проведении измерений непосредственно в операционной зоне под контролем эндоскопа и последующее проектирование оптимальных с точки зрения эргономических показателей инструментов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЯЕМЫЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 1995 |
|
RU2080095C1 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ ДЛЯ НАЛОЖЕНИЯ СКОБОК, СОДЕРЖАЩИЙ МНОГОХОДОВОЙ ВЫТАЛКИВАЮЩИЙ МЕХАНИЗМ С РОТОРНОЙ ПЕРЕДАЧЕЙ | 2005 |
|
RU2434592C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ ДЛЯ НАЛОЖЕНИЯ СКОБОК, СОДЕРЖАЩИЙ МНОГОХОДОВЫЙ ВЫТАЛКИВАЮЩИЙ МЕХАНИЗМ С НЕРАВНОМЕРНЫМ ШАГОМ И РОТОРНОЙ ПЕРЕДАЧЕЙ | 2005 |
|
RU2434593C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ ДЛЯ НАЛОЖЕНИЯ СКОБОК, ВКЛЮЧАЮЩИЙ МЕХАНИЗМ ЗАПУСКА МНОЖЕСТВЕННЫМИ ПУСКОВЫМИ НАЖАТИЯМИ, ИМЕЮЩИЙ РОТОРНУЮ ПЕРЕДАЧУ С ПРЕДОХРАНИТЕЛЬНОЙ ФРИКЦИОННОЙ МУФТОЙ | 2005 |
|
RU2408306C2 |
| МЕХАНИЗИРОВАННЫЙ РУЧНОЙ ИНСТРУМЕНТ | 1993 |
|
RU2077419C1 |
| СПОСОБ ЭВЕНТЕРАЦИИ ТРУБЧАТОГО ОРГАНА И ГИЛЬЗА ТРОАКАРА ДЛЯ ЭВЕНТЕРАЦИИ ТРУБЧАТОГО ОРГАНА ПРИ ЛАПАРОСКОПИИ | 2016 |
|
RU2647165C2 |
| СТАНОК ДЛЯ УСТАНОВКИ ИНСТРУМЕНТА ОТНОСИТЕЛЬНО ЗАГОТОВКИ | 1990 |
|
RU2076020C1 |
| ПРИВОД ДЛЯ ИНСТРУМЕНТА ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2014 |
|
RU2570939C1 |
| УСТРОЙСТВО ДЛЯ УСТАНОВКИ МЕДИЦИНСКИХ ИНСТРУМЕНТОВ | 2003 |
|
RU2238043C1 |
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ ИНОРОДНЫХ ТЕЛ ИЗ ПОЛЫХ ОРГАНОВ "ТРАЛ" (ВАРИАНТЫ) | 1998 |
|
RU2145488C1 |
Изобретение относится к медицинской технике, в частности к хирургическим манипуляторам и может быть использовано в экспериментальной хирургии при проектировании и разработке инструментария для проведения внутриполосных, преимущественно эндоскопических операций.Техническим результатом изобретения является создание манипулятора, выполняющего функции регулируемого шаблона для подбора оптимальной формы хирургического эндоскопического инструментария и приспособлений. Устройство содержит корпус, снабженный рукояткой и связанный с одним концом трубчатого элемента 4, удлиненный рабочий орган, образованный подвижным 8 и неподвижным 7 элементами, осевой 27 шарнир привода углового поворота, органы управления рабочим органом, и измерительные шкалы 18 и 24 - 26 в виде рисок с опорными штрихами 28 и 29. Рабочий орган установлен на конце трубчатого элемента 4 посредством шарнира с осью 27 и телескопического узла, образованного внешней 10 и внутренней 11 трубками. Телескопический узел обеспечивает перемещение рабочего органа в направлении его продольной оси 30 и вращение вокруг последней. Одна пара противолежащих концов наружной 10 и внутренней 11 трубок жестко скреплена с корпусным элементом 22 шарнира и неподвижным 7 элементом рабочего органа соответственно, а другая пара - свободна. Направляющая 36 телескопического узла выполнена в виде стержня, прикрепленного одним концом к внутренней поверхности корпусного элемента 22 шарнира. Другим концом направляющая 36 размещена в осевом канале в теле неподвижного 7 элемента рабочего органа с возможностью поступательного перемещения и вращения. Привод осевого перемещения и вращения выполнен в виде гибкого вала 40, одним концом соединенного со втулкой 39, насаженной на штырь 38, прикрепленный к внутренней поверхности внутренней трубки 11, а противоположным концом - со штоком 12 органов управления манипулятором. 7 з.п. ф-лы, 8 ил.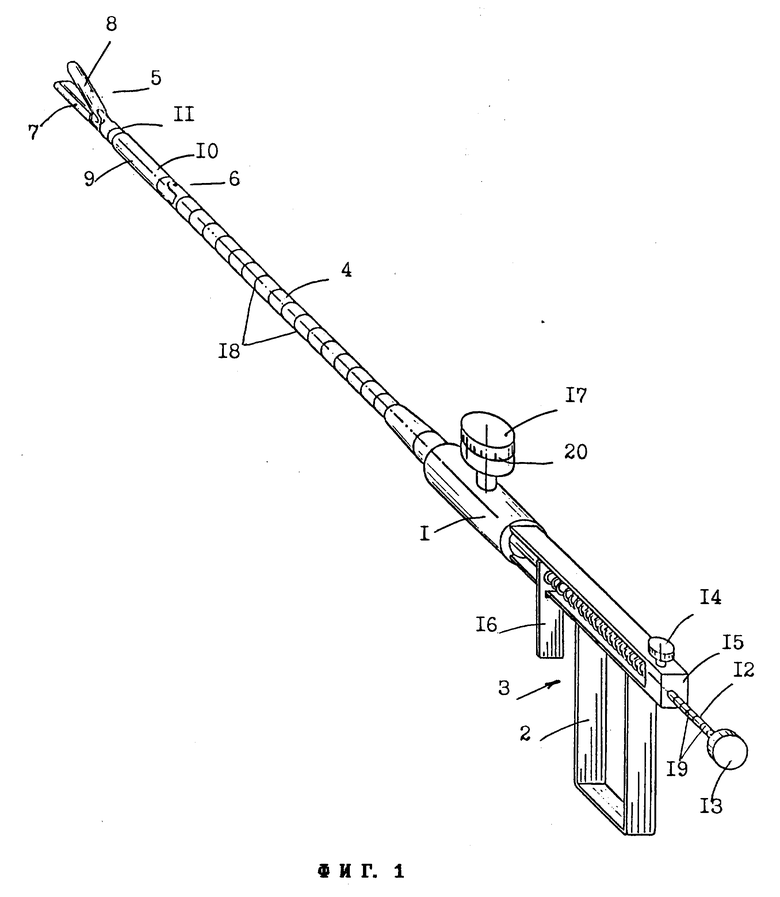
| SU, авторское свидетельство, 736949, кл | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
