Перекрестные ссылки на «родственные» заявки
Настоящее изобретение относится к находящейся одновременно на рассмотрении заявке того же заявителя, озаглавленной «Хирургический инструмент для наложения скобок, содержащий многоходовый выталкивающий механизм с роторной передачей», авторами которой являются Шелтон Фредерик Э., Сетцер Майкл Эрл и Хоффман Дуглас Б., зарегистрированной той же датой, сущность которой в полном объеме включена в настоящую заявку путем ссылки.
Область изобретения
Настоящее изобретение относится, в общем, к хирургическим инструментам для наложения скобок, с помощью которых можно накладывать швы в виде линий скобок на ткани, в то же время разрезая ткань между этими линиями скобок, а более конкретно к усовершенствованиям, относящимся к интрументам для наложения скобок и к усовершенствованиям процессов формирования различных компонентов таких инструментов, при применении которых осуществляют выталкивание посредством выполнения множества ходов пускового курка.
Предпосылки к созданию изобретения
Эндоскопические хирургические инструменты часто являются предпочтительными в сравнении с традиционными хирургическими устройствами, предназначенными для выполнения операций на открытых участках тела, так как при эндоскопических операциях выполняют разрезы меньшего размера, благодаря чему наблюдается тенденция к уменьшению времени послеоперационного восстановления и возникновению осложнений. Поэтому значительные усовершенствования уже произведены в номенклатуре эндоскопических хирургических устройств, пригодных для точного расположения рабочего органа на дистальном конце около желательного места хирургического вмешательства через катетер троакара. Этими рабочими органами на дистальном конце воздействуют на ткань рядом способов для достижения диагностического или терапевтического эффекта (например, используют внутренний режущий инструмент, захват, режущий инструмент, инструменты для наложения скобок, устройство для установки зажимов, приспособление для обеспечения доступа, устройство для доставки медикаментов/терапевтических генных средств, энергетическое устройство, в котором используют ультразвук, радиочастотные средства, лазерный луч и т.д.).
Известны хирургические инструменты для наложения скобок и рабочие органы, которыми одновременно выполняют продольные разрезы ткани и накладывают швы в виде линий скобок на противоположные стороны разреза. Рабочий орган содержит пару взаимодействующих губок, которые, если аппарат предназначен для эндоскопических или лапароскопических применений, способны проходить через канал канюли. В одной из губок располагают обойму со скобками, содержащую по меньшей мере два отстоящих друг от друга в поперечном направлении ряда скобок. Другая губка представляет собой матрицу, содержащую лунки для загиба ножек скобок, расположенные против рядов скобок обоймы. Аппарат содержит множество клиньев, установленных с возможностью возвратно-поступательного перемещения, которые при дистанционном приводе проходят сквозь отверстия в магазине со скобками и сопрягаются с приводными элементами, несущими скобки, так, чтобы произвести выталкивание скобок в направлении матрицы.
Примером может служить хирургический инструмент для наложения скобок, пригодный для эндоскопического применения, описанный в патенте США № 5465895, посредством которого с успехом выполняют четкий зажим и выталкивание. С помощью этого аппарата врач может сжать губки, захватив ткань, для расположения ткани до выталкивания. Когда врач определяет, что ткань правильно захвачена губками, он может затем произвести выталкивание хирургическим инструментом для наложения скобок посредством одного хода толкателя, таким образом разрезая и накладывая скобки на ткань. Одновременное разрезание и наложение скобок исключает возникновение осложнений, которые могут произойти, если такие действия выполняют последовательно, используя различные хирургические аппараты, которыми соответственно только разрезают или только накладывают скобки.
Одно особое преимущество, достигаемое в результате возможности закрывать аппарат над тканью до выталкивания, состоит в том, что врач может убедиться, при рассмотрении через эндоскоп, что достигнуто желаемое расположение аппарата для выполнения разреза и что количество ткани, захваченное между противоположными губками, является достаточным. В противном случае противоположные губки могут быть сближены слишком сильно, особенно сильно сжаты их отдаленные концы, и в результате зажатые скобки в разрезанной ткани будут установлены не эффективно. В другом крайнем случае чрезмерное количество зажатой ткани может вызвать заклинивание и неполное выталкивание.
В общем, выполнение одного хода для закрывания губок и последующего одного хода для выталкивания является удобным и эффективным путем осуществления разрезания и наложения скобок. Однако в некоторых случаях было бы желательным, чтобы требовалось выполнение нескольких ходов. Например, хирурги имеют возможность выбрать, в определенном диапазоне, размер губок с соответствующей длиной обоймы скобок для выполнения разреза желаемой длины. При использовании более длинных обойм со скобками требуется выполнять более длинный ход толкателя. Поэтому требуется приложение большей силы на пусковой курок, на который нажимают рукой, для выполнения выталкивания при использовании этих более длинных обойм со скобками, чтобы разрезать больше ткани и продвигать больше скобок, в сравнении с более короткой обоймой со скобками. Было бы более желательным, чтобы величина требующегося усилия была меньше и сопоставима с усилием, прикладываемым при использовании более коротких обойм, и чтобы она не превышала силу, которую могут создать рукой некоторые хирурги. Кроме того, некоторые хирурги, не привыкшие к использованию больших обойм со скобками, могут подумать, что происходят заедания или другие неисправности, когда неожиданно требуется прикладывать большее усилие.
Один путь уменьшения требуемого усилия для выполнения хода при выталкивании заключается в использовании храпового механизма, применение которого позволяет перемещать пусковой курок множество раз, как это описано в патентах США № 5762256 и № 6330965. Однако есть уверенность в том, что передача возвратно-поступательного движения курка выталкивателя напрямую жесткой зубчатой рейке посредством собачки ограничивает возможности конструкции в обеспечении желаемой величины перемещения выталкивателя во время каждого хода выталкивания. Кроме того, эти известные хирургические инструменты для наложения скобок с многоходовыми выталкивающими механизмами не обладают преимуществами, состоящими в выполнении отдельно операций смыкания и выталкивания.
Следовательно, существует значительная потребность в хирургическом инструменте для наложения скобок, в котором используют множество ходов выталкивания для выполнения разреза желаемой длины и наложения скобок, с желаемым соотношением длины хода выталкивания и продольного перемещения при выталкивании, производимом концевым рабочим органом, а более конкретно, потребность в инструменте, при использовании которого можно оптимизировать усилие и длину хода при каждом ходе.
Краткое описание изобретения
Посредством изобретения можно преодолеть упомянутые выше недостатки и другие сложности ранее известных решений в этой области путем создания хирургического инструмента для наложения скобок и разрезания, содержащего роторную передачу, с помощью которой передают последовательность множества ходов выталкивания. В частности, принимая во внимание, что концевой рабочий орган такого инструмента требует различных уровней величины усилия во время выталкивания, с помощью роторной передачи выталкивающего механизма изменяют передаточное отношение во время выполнения определенных ходов в сравнении с другими ходами, оптимизируя процесс выталкивания так, чтобы требовалось создавать более равномерные усилия. Таким образом, использование рукоятки не требует выполнения избыточного количества ходов выталкивания, а просто требуется выполнение дополнительного количества ходов тогда, когда необходимо приложение больших усилий.
Согласно другой отличительной особенности изобретения хирургический инструмент содержит концевой рабочий орган, отвечающий на продольное выталкивающее перемещение для выполнения хирургической операции. Пользователь вызывает перемещение привода выталкивания для обеспечения перемещения выталкивания, которое выборочно передается выталкивающим механизмом. Более конкретно, кулачковый диск содержит множество кулачковых контуров, расположенных по меньшей мере на части его окружности, которые соответственно сопряжены с ведущим клином, соединенным с приводом выталкивания при выполнении перемещения выталкивания. Кулачковый диск соединен с зубчатой рейкой зубчатым зацеплением для преобразования этого прерывистого вращательного движения в продольное выталкивающее движение. Плечо и радиальное расстояние относительно друг друга кулачковых контуров с успехом варьируют для передачи величины силы, требуемой во время соответствующего хода. Увеличение передаточного отношения во время выполнения конкретного хода, при котором испытывают существенное сопротивление действию рабочего органа (например, при разрезании ткани, при сопротивлении трения во время перемещения толкающего бруса, при формировании скобки), позволяет выполнять минимальное число множества ходов, при этом хирург при каждом ходе испытывает одинаковое ощущение.
Эти и другие цели и преимущества настоящего изобретения станут более понятными при ознакомлении с прилагаемыми чертежами и их описанием.
Краткое описание чертежей
Прилагаемые чертежи, включенные в настоящую заявку и составляющие ее часть, иллюстрируют варианты исполнения изобретения и вместе с общим описанием изобретения, приведенным выше, и подробным описанием вариантов исполнения, приведенным ниже, служат для пояснения принципов настоящего изобретения.
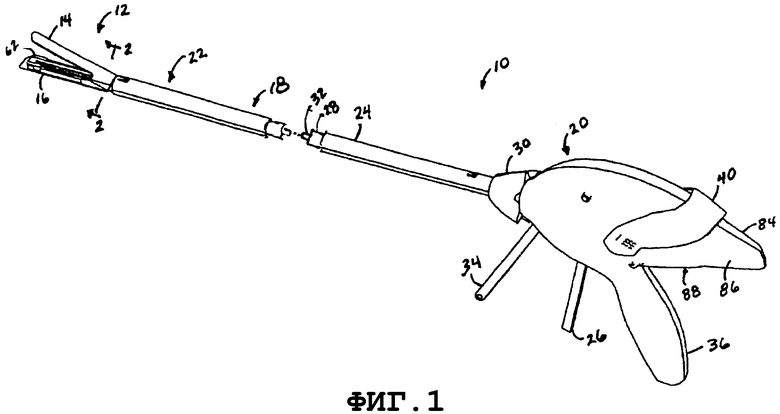
На Фиг.1 изображен вид в перспективе хирургического инструмента для наложения скобок и разрезания, содержащего рабочий орган в раскрытом состоянии;
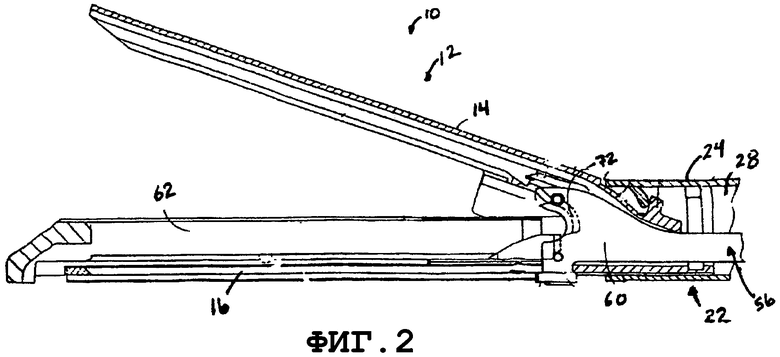
на Фиг.2 - вид с левой стороны (разрез 2-2) рабочего органа, представленного на Фиг.1 в открытом состоянии;
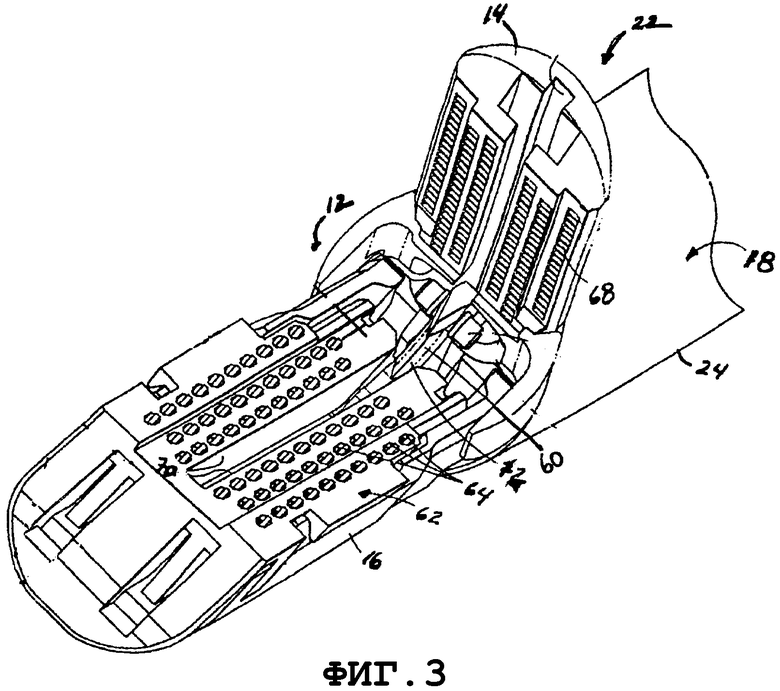
на Фиг.3 - вид в перспективе рабочего органа в открытом состоянии, представленного на Фиг.1;
на Фиг.4 - вид в перспективе в разобранном состоянии исполнительной части хирургического инструмента для наложения скобок и разрезания;
на Фиг.5 - вид в перспективе в разобранном состоянии рукоятки хирургического инструмента для наложения скобок и разрезания, представленного на Фиг.1;
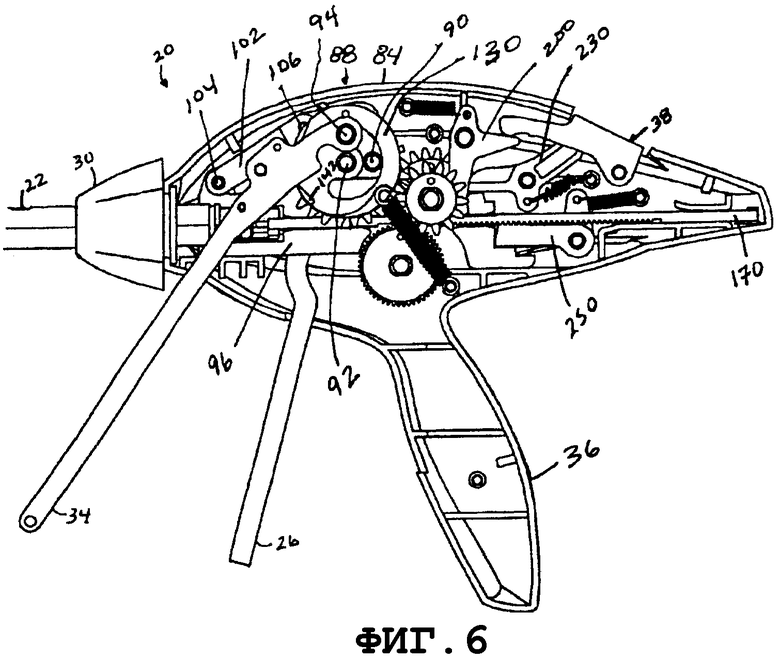
на Фиг.6 - вид с левой стороны рукоятки хирургического инструмента, представленного на Фиг.1, в раскрытом состоянии, причем левая часть корпуса рукоятки удалена, чтобы был виден механизм выталкивания, содержащий роторную передачу для осуществления множества ходов выталкивания;
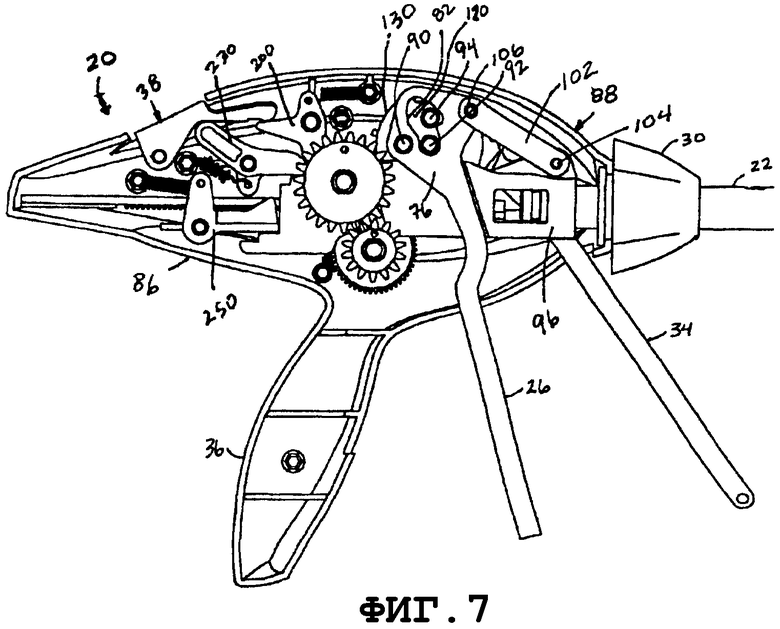
на Фиг.7 - вид с правой стороны рукоятки, представленной на Фиг.6, с удаленной правой частью корпуса рукоятки, чтобы был виден механизм закрывания и средства против обратного хода;
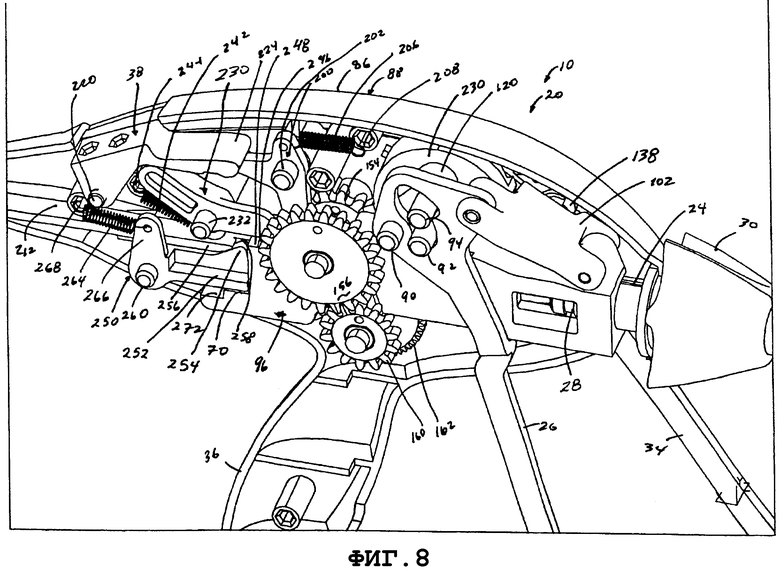
на Фиг.8 - вид в перспективе сверху рукоятки, представленной на Фиг.7;
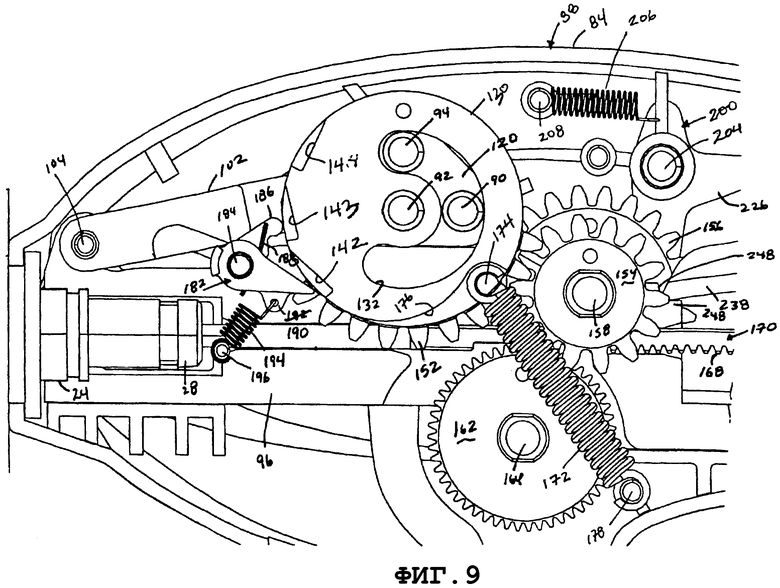
на Фиг.9 - вид сбоку рукоятки, представленной на Фиг.6, с закрывающим курком в закрытом состоянии и удаленным курком для выталкивания, чтобы был виден ведущий клин выталкивания и кулачковые контуры кулачкового диска;
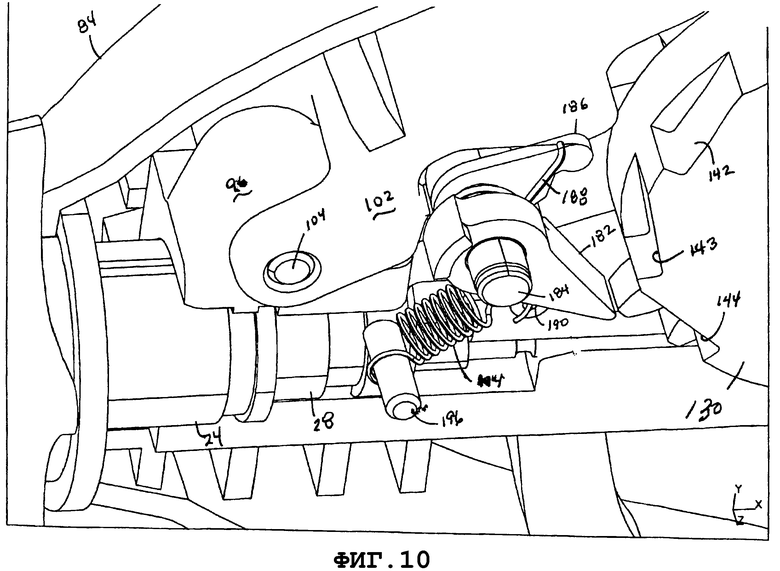
на Фиг.10 - вид в перспективе сверху ведущего клина выталкивания и кулачковых контуров, представленных на Фиг.9;
на Фиг.11 - вид в перспективе сзади роторной передачи выталкивающего механизма рукоятки, представленной на Фиг.1;
на Фиг.12 - вид сбоку рукоятки, представленной на Фиг.6, в закрытом и сработавшем состоянии, причем малая промежуточная шестерня роторной передачи выталкивающего механизма удалена, чтобы был виден маятник против обратного хода, контактирующий с жесткой зубчатой рейкой;
на Фиг.13 - вид сбоку кулачкового диска роторной передачи выталкивающего механизма, содержащего неравные ходы выталкивания для оптимизации усилий, которые требуется прикладывать к курку выталкивателя хирургического инструмента для наложения скобок и разрезания, представленного на Фиг.1;
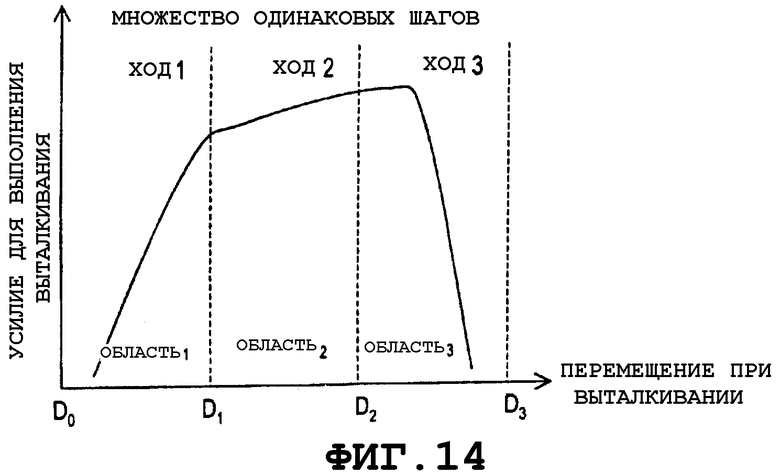
на Фиг.14 - иллюстративная диаграмма зависимости усилия выталкивания от перемещения при выталкивании в аппарате, в котором используют множество ходов выталкивания с одинаковыми ходами выталкивания;
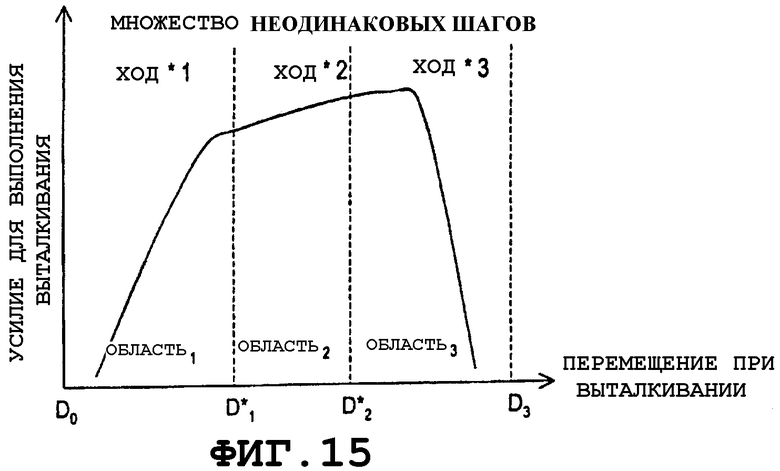
на Фиг.15 - иллюстративная диаграмма зависимости усилия выталкивания от перемещения при выталкивании в аппарате, в котором используют множество ходов выталкивания с неодинаковыми ходами выталкивания, оптимизированными по усилию выталкивания, испытываемому пусковым курком;
на Фиг.16 - прямолинейная зубчатая рейка, содержащая неравномерно отстоящие зубцы зубчатой рейки механизма выталкивания с линейной передачей, включающего неравномерные ходы выталкивания для оптимизации усилий на пусковом курке механизма выталкивания инструмента для наложения скобок и разрезания, представленного на Фиг.1;
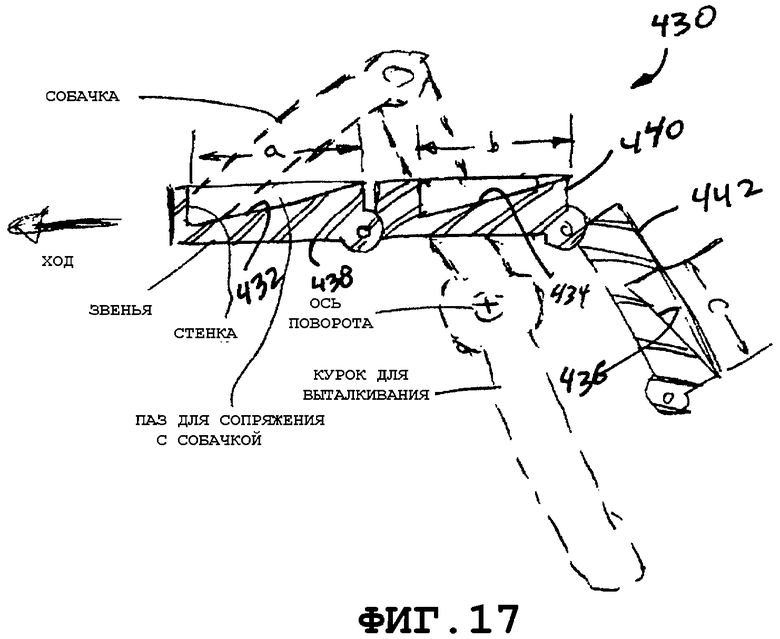
на Фиг.17 - зубчатая рейка, состоящая из соединенных между собой звеньев, содержащая неодинаково отстоящие зубцы зубчатой рейки механизма выталкивания с линейной передачей, включающего неравномерные ходы выталкивания для оптимизации усилий на пусковом курке механизма выталкивания хирургического инструмента для наложения скобок и разрезания, представленного на Фиг.1;
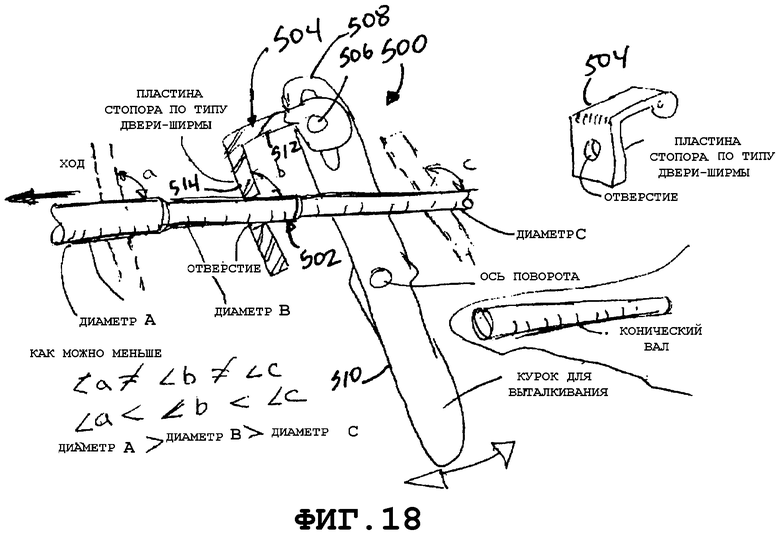
на Фиг.18 - линейный механизм выталкивания с конусообразным стержнем с приводом со стопором по типу двери-ширмы, содержащим неравномерные ходы выталкивания для оптимизации усилий на курке механизма выталкивания инструмента для наложения скобок и разрезания, представленного на Фиг.1.
Подробное описание изобретения
На Фиг.1-4 (где одинаковыми номерами позиций обозначены одинаковые компоненты в нескольких видах) изображен инструмент 10 для наложения скобок и разрезания, с помощью которого могут быть достигнуты необычные преимущества настоящего изобретения. Инструмент 10 для наложения скобок и разрезания содержит концевой рабочий орган 12, включающий матрицу 14, шарнирно соединенную с удлиненным каналом 16, образуя противоположные губки для зажима ткани, которую надлежит разрезать и на которую надлежит наложить скобки. Концевой рабочий орган 12 соединен валом 18 с рукояткой 20. Исполнительной части 22, образованной из рабочего органа 12 и вала 18, приданы такие размеры для того, чтобы ее можно было вводить через троакар или маленькое лапароскопическое отверстие для выполнения эндоскопической хирургической процедуры и чтобы, в то же время, ею мог управлять хирург, сжимающий в руке рукоятку 20. Рукоятка 20 обладает полезными отличительными особенностями, которые позволяют отделить процесс закрывания рабочего органа 12 от процесса выталкивания, а также позволяют выполнять множество ходов для осуществления выталкивания (т.е. разрезания и наложения скобок) в рабочем органе 12, в то же время показывая хирургу степень выталкивания.
Для этого закрывающая трубка 24 вала 18 соединена с курком 26 для закрывания и матрицей 14 для обеспечения закрывания рабочего органа 12. Внутри закрывающей трубки 24 рамка 28 соединена с удлиненным каналом 16 и рукояткой 20 для позиционирования в продольном направлении и поддержания концевого рабочего органа 12. Поворотная ручка 30 соединена с рамкой 28, и оба элемента присоединены к рукоятке 20 с возможностью их поворота под воздействием поворотного момента относительно продольной оси вала 18. Таким образом хирург может повернуть рабочий орган 12 путем поворота поворотной ручки 30. Закрывающую трубку 24 также можно поворачивать с помощью поворотной ручки 30, но сохраняется возможность некоторого продольного перемещения относительно нее, чтобы вызвать закрывание концевого рабочего органа 12. Внутри рамки 28 расположен с возможностью продольного перемещения выталкивающий шток 32, и он соединен с матрицей 14 рабочего органа 12 и курком 34 для многоходового выталкивания. Курок 26 для закрывания расположен на расстоянии от рукоятки 36 пистолетного типа рукоятки 20, а курок 34 для выталкивания отдален как от рукоятки 36 пистолетного типа, так и от курка 26 для закрывания.
При выполнении эндоскопической операции, когда исполнительную часть 22 вводят в тело пациента для достижения места выполнения операции, хирург, глядя на эндоскопическое или другое диагностическое отображающее устройство, захватывает ткань между матрицей 14 и удлиненным каналом 16.
Прижимая курок 26 для закрывания к рукоятке 36 пистолетного типа, хирург может повторно захватывать ткань и позиционировать концевой рабочий орган. Когда хирург удовлетворен как расположением ткани относительно рабочего органа 12, так и количеством ткани в нем, он нажимает на курок 26 для закрывания полностью в направлении рукоятки 36 пистолетного типа, сжимая ткань в рабочем органе 12 и фиксируя курок 26 для закрывания в этом зажатом (закрытом) состоянии. Если хирург не удовлетворен этим положением, то он может отпустить курок 26 для закрывания нажатием на высвобождающую кнопку 38 (см. Фиг.4), действие которой описано более подробно ниже, и после этого выполнить повторно процедуру зажима ткани.
Если зажим ткани выполнен правильно, то хирург может продолжить работу, производя выталкивание хирургическим инструментом 10 для наложения скобок и разрезания. Более конкретно, хирург захватывает курок 34 для выталкивания и рукоятку 36 пистолетного типа и нажимает на курок 34 для выталкивания заранее определенное число раз. Необходимое число рабочих ходов для выталкивания определяют эргономически, принимая во внимание максимальный размер руки, максимальную величину усилия, которое можно передать на аппарат во время каждого рабочего хода выталкивания, и продольное расстояние и силу, которые требуется передать через выталкивающий шток 32 к рабочему органу 12 во время выталкивания. Отдельные хирурги могут выбрать режим воздействий на курок 34 для выталкивания в различном угловом диапазоне перемещения и таким образом увеличивать или уменьшать число ходов курка 34 для выполнения выталкивания.
Высвобождающая кнопка 38 на Фиг.1 загорожена рычагом 40 для отведения назад, который может быть повернут дистально поверх верхней стороны рукоятки 20 для того, чтобы сделать видимой кнопку 38 для выведения из закрытого состояния, когда хирургическим инструментом 10 для сшивания и разрезания выполнена операция выталкивания. После высвобождения кнопки 38 для выведения из закрытого состояния для выведения из зацепления роторной передачи выталкивающего механизма 42 внутри рукоятки 20 хирург может оттянуть рычаг 40 для отведения назад в проксимальном направлении для того, чтобы способствовать отводу выталкивающего штока 32 из концевого рабочего органа 12.
Исполнительная часть, содержащая Е-образный концевой рабочий орган
Преимущества рукоятки 20, с помощью которой можно производить многоходовое выталкивающее движение, используют в ряде аппаратов, причем один из таких концевых рабочих органов 12 изображен на Фиг.1-4. Рабочий орган 12 реагирует на движение закрывания, сообщаемое посредством рукоятки 20, которое передают в продольном направлении дистально с помощью закрывающей трубки 24. Удлиненный канал 16 шарнирно соединен с матрицей 14 с образованием противоположных губок, которые связаны с рамкой 28, образующей жесткое соединение с рукояткой 20. Закрывающая трубка 24 находится в контакте с матрицей 14 дистально от шарнирного соединения между матрицей 14 и удлиненным каналом 16. Таким образом перемещение закрывающей трубки 24 в дистальном направлении относительно рамки 28 вызывает закрывание, а перемещение в проксимальном направлении относительно рамки 28 вызывает открывание рабочего органа 12.
Исполнительная часть 22 (см. Фиг.4) также содержит компоненты, реагирующие на выталкивающее движение от рукоятки 20, более конкретно - движение выталкивающего штока 32, посредством которого сообщают продольное движение от выталкивающего механизма 42, расположенного в рукоятке 20, исполнительной части 22. В частности, выталкивающий шток 32 (показан на Фиг.5 в разобранном состоянии) сопрягают с возможностью поворота с желобчатым элементом 46 в продольном пазу 48 рамки 28. Желобчатый элемент 46 перемещается в продольном направлении внутри рамки 28, непосредственно реагируя на продольное перемещение выталкивающего штока 32. Продольный паз 50 в закрывающей трубке 24 оперативно связан с поворотной ручкой 30 (не показана), причем продольный паз 50 дополнительно позволяет поворотной ручке 30 сопрягаться с рамкой 28 в области маленькой продольной прорези 52 в ней для осуществления поворота. Длина продольного паза 50 в закрывающей трубке 24 достаточно большая, чтобы обеспечить возможность относительного продольного перемещения поворотной ручки 30 для выполнения движений закрывания соответственно.
Дистальный конец желобчатого элемента 46 присоединен к проксимальному концу выталкивающего стержня 56, который движется вместе с рамкой 28, чтобы дистально вывести Е-образный участок 60 в рабочий орган 12. Рабочий орган 12 содержит обойму 62 скобок, приводимую в действие Е-образным участком 60, которой выводит скобки из отверстий 64 для скобок обоймы 62 в контакт с формирующими канавками 68 в матрице 14, для сжимания скобок в виде буквы «В». Корпус 86 (см. Фиг.3) обоймы скобок дополнительно содержит открытый с проксимального конца вертикальный паз 70 для прохода ориентированной в вертикальном направлении режущей поверхности, выполненной вдоль дистального конца Е-образного участка 60 для разрезания ткани, которую в это же время сшивают скобками.
Иллюстративный рабочий орган 12 описан более подробно в пяти рассматриваемых одновременно заявках на патенты США того же заявителя, сущность каждой из которых включена в настоящую заявку в полном объеме путем ссылки; к ним относятся заявки: (1) Шелтона Фредерика Э., Сетцера Майкла и Вейсенбурга Брюса «Хирургический инструмент для наложения скобок, содержащий один блокирующий механизм для предотвращения выталкивания», сер. № 10/441424, зарегистрированная 20 июня 2003 г.; (2) Шелтона Фредерика Э., Сетцера Майкла и Хеммельгарна Брайана Дж. «Хирургический инструмент для наложения скобок, содержащий отдельные определенные закрывающие и выталкивающие системы», сер. № 10/441632, зарегистрированная 20 июня 2003 г.; (3) Шелтона Фредерика Э., Сетцера Майкла и Вейсенбурга Брюса «Хирургический инструмент для наложения скобок, содержащий блокировку расходной обоймы», сер. № 10/441565, зарегистрированная 20 июня 2003 г.; (4) Шелтона Фредерика Э., Сетцера Майкла и Вейсенбурга Брюса «Хирургический инструмент для наложения скобок, содержащий блокировку выталкивания при незакрытой матрице», сер. № 10/441580, зарегистрированная 20 июня 2003 г.; (5) Шелтона Фредерика Э., Сетцера Майкла и Вейсенбурга Брюса «Хирургический инструмент для наложения скобок, содержащий выталкивающий механизм с е-образным участком», сер. № 10/443617, зарегистрированная 20 июня 2003 г.
Следует иметь в виду, что хотя здесь изображен нешарнирный вал 18, заявки на настоящее изобретение могут содержать аппараты, приспособленные к повороту на шарнирах, как это описано в пяти рассматриваемых одновременно заявках на патенты США того же заявителя, сущность каждой из которых включена в настоящую заявку в полном объеме путем ссылки; к ним относятся заявка: (1) Шелтона Фредерика Э., Хеммельгарна Брайана Дж., Свейза Джефа, Уолеса Кеннета С. «Хирургический аппарат, содержащий шарнирный механизм с возможностью поворота относительно продольной оси», сер. № 10/615973, зарегистрированная 9 июля 2003 г.; (2) Хеммельгарна Брайана Дж. «Хирургический инструмент для наложения скобок, содержащий шарнирное соединение трассы выталкивающего стержня», сер. 10/615962, зарегистрированная 9 июля 2003 г.; (3) Свейза Джефа «Хирургический аппарат с подвижной в поперечном направлении системой контроля шарнирного соединения», сер. № 10/615972, зарегистрированная 9 июля 2003 г.; (4) Шелтона Фредерика Э., Сетцера Майкла и Вейсенбурга Брюса «Хирургический инструмент для наложения скобок, содержащий конический выталкивающий стержень для повышения гибкости вокруг шарнирного соединения», сер. № 10/615974, зарегистрированная 9 июля 2003 г.; (5) Свейза Джефа, Хьюайла Джозефа Чарльза «Хирургический инструмент для наложения скобок, содержащий опорные пластины шарнирного соединения для поддержки выталкивающего стержня», сер. № 10/615971, зарегистрированная 9 июля 2003 г.
Рукоятка многоходового выталкивающего механизма
Рукоятка 20 (см. Фиг.5-8) реагирует на приведение в действие курка 26 для закрывания и курка 34 для выталкивания для генерирования соответственно закрывающего и выталкивающего движений по направлению к исполнительной части 22. Что касается закрывающего движения, то курок 26 для закрывания содержит верхнюю часть 76, в которой выполнено три поперечных отверстия: отверстие 78 для пальца, расположенное спереди; нижнее, заднее шарнирное отверстие 80 и центральный вырез 82. Три стержня располагают в поперечном направлении и сопрягают с правой и левой половинами 84, 86 корпуса 88 рукоятки (причем правый полукорпус 84 показан на Фиг.5, 6, а левый полукорпус 86 показан на Фиг.7). В частности, задний стержень 90 проходит сквозь заднее шарнирное отверстие 80 верхней части 76 курка 26 для закрывания и таким образом курок 26 для закрывания поворачивается относительно заднего стержня 90. Передний стержень 92 расположен на расстоянии от заднего стержня 90, а верхний стержень 94, расположенный над передним стержнем 92, проходит сквозь центральный вырез 82, которому придана такая форма, чтобы ограничивать перемещение курка 26 для закрывания путем контактирования переднего и заднего стержней 92, 94 при каждом крайнем положении хода курка. Таким образом, центральный вырез 82 содержит вертикальную часть, нижняя поверхность которой контактирует с передним стержнем 92, когда курок 26 для закрывания находится в переднем дистальном положении, и содержит верхнюю проксимально наклоненную часть, верхняя и передняя поверхности которой контактируют с верхним стержнем 94 соответственно, когда курок 26 для закрывания находится в его переднем ненагруженном положении и в его проксимальном приведенном в действие положении.
Закрывающая обойма 96, сопряженная с закрывающей трубкой 24, установлена с возможностью продольного скольжения в корпусе 88 рукоятки и сопряжена своим дистальным концом с проксимальным концом закрывающей трубке 24 и таким образом может передавать продольное закрывающее перемещение закрывающей трубке 24 и, следовательно, матрице 14 для закрывания рабочего органа 12. Это сопряжение обеспечивает возможность вращения закрывающей трубки 24, в то время как закрывающая обойма 96 не вращается. Над этим сопряжением поперечное отверстие 100 для пальца соединено с закрывающей тягой 102 передним пальцем 104, причем другой конец закрывающей тяги 102 соединен с отверстием 78 для пальца курка 26 для закрывания посредством заднего пальца 106.
Треугольная проставка 120 содержит отверстия 122-126 для расположения в них стержней 90-94 и ее устанавливают слева от верхней части 76 курка 26 для закрывания. Слева от треугольной проставки 120 на переднем стержне 92 установлен с возможностью вращения кулачковый диск 130, и он содержит полукруглый паз 132, в который вводят задний и верхний стержни 90, 94. В центральное отверстие 134 вставляют передний стержень 92. Слева от кулачкового диска 130 в отверстие 136 для стержня около верхнего конца 138 курка 34 для выталкивания вставляют стержень 94. Дистально открытый паз 140 в курке 34 для выталкивания под отверстием 136 для стержня согласовывают так, чтобы в него можно было ввести передний стержень 92, позволяя оттягивать курок 34 для выталкивания в дистальном направлении во время выполнения операции выталкивания. Фрикционное направленное вниз сопряжение кулачковой тяги 102 (см. Фиг.8) с курком 34 для выталкивания во время приведения в действие курка 26 для закрывания понуждает курок 34 для выталкивания к частичному оттягиванию в дистальном направлении так, чтобы курок 34 для выталкивания можно было легко захватить.
Кулачковый диск 130 (см. Фиг.5, 9 и 10) содержит последовательность кулачковых контуров 142-144 (см. Фиг.9) на переднем участке (если он находится в состоянии, когда не производят операции выталкивания, как это изображено на Фиг.9), а более конкретно - вдоль его левой стороны, которые соответственно сопряжены с курком 34 для выталкивания для сообщения поворота кулачковому диску 130, его верхней части вперед. Этот поворот передается через зубчатую передачу 150 (см. Фиг.10) роторной передачи выталкивающего механизма 42, включающей зубчатую часть 152 на нижнем участке правой стороны кулачкового диска 120, которая находится в зацеплении с малой промежуточной шестерней 154, посредством которой таким образом поворачивают (верхней частью назад) с повышенной скоростью относительно кулачкового диска 130. Большая промежуточная шестерня 156 соединена холостой осью 158 с малой промежуточной шестерней 154 и таким образом вращается в том же направлении и с той же скоростью. Вторая малая шестерня 160 находится в зацеплении с большей промежуточной шестерней 156 и таким образом вращается (верхней частью вперед) с большей скоростью. Большая шестерня 162 с мелкими зубьями связана второй осью 164 со второй малой шестерней 160 и таким образом вращается в том же направлении и с той же скоростью, что и вторая малая шестерня 160. Таким образом, посредством зубчатой передачи 150 ускоряют движение кулачкового диска 130 путем включения редукционного фактора посредством двух шестерен для обеспечения дополнительного продольного выталкивающего движения. Большая шестерня 162 с малым зубом находится в зацеплении с зубчатым сегментом 168 с задней стороны жесткой зубчатой рейки, отдаленный конец которой сопряжен с проксимальным концом выталкивающего штока 32. Дистальная часть зубчатой рейки 170 установлена с возможностью скольжения в продольном направлении в закрывающей обойме 96. А ее проксимальная часть установлена с возможностью скольжения в продольном направлении между правой и левой половинами 84, 86 корпуса 88 рукоятки.
Выборочное зацепление курка 34 для выталкивания с кулачковыми контурами 142-144 обеспечивает дополнительное продольное перемещение путем обеспечения возможности выполнения множества ходов курка 34 для выталкивания. Для подготовки зубчатой передачи 150 к выталкиванию кулачковый диск 130 отводят в положение, при котором отсутствует выталкивание с помощью пружины 172 для отвода зубчатой передачи, соединенной с выступающим с левой стороны пальцем 174, выполненным за одно целое с кулачковым диском 130 и сформированным в кольцевом углублении 176 в нижнем проксимальном краю кулачкового диска 130 (см. Фиг.9, 10). Другой конец пружины 172 для отвода зубчатой передачи соединен с пальцем 178, выполненным за одно целое с корпусом 88 рукоятки.
Ниже и в дистальном направлении от верхнего конца 138 (см. Фиг.5, 9, 11) курка 34 для выталкивания находится отверстие 180 для пальца ведущего клина. Ведущий клин 182 удерживают около левой стороны курка 34 для выталкивания с помощью пальца 184 ведущего клина, между которым расположен отклоняющий палец 186, контактирующий с центральной не имеющей кулачковых контуров окружной поверхностью кулачкового диска 120. С помощью пружины 188 (выполненная по типу используемых в мышеловках), расположенной между направленным вверх и в проксимальном направлении отклоняющим пальцем 186 и направленным вниз и в проксимальном направлении ведущим клином 182, понуждают ведущий клин 182 поворачиваться вверх и входить в сопряжение с кулачковыми контурами 142-144 кулачкового диска.
Ниже отверстия 180 для пальца ведущего клина имеется расположенное ниже и в проксимальном направлении отверстие 190 для пальца ведущего клина 182, а курок 34 для выталкивания содержит нижнее отверстие 192 для пальца. Противоположная пружина растяжения 194 прикреплена к направленному вправо выступающему пальцу 196, в нижнее отверстие 192 для пальца и в отверстие 190 для пальца для понуждения ведущего клина 182 поворачиваться вниз, таким образом препятствуя слишком сильному повороту ведущего клина 182 вверх, когда курок 34 для выталкивания отводят периодически в дистальном направлении между ходами (см. Фиг.10, на которой курок 34 для выталкивания не показан).
Когда ведущий клин 182 (см. Фиг.12) оттягивают от одного из кулачковых контуров 142-144 кулачкового диска между ходами выталкивания, кулачковый диск 130 стремится поворачиваться верхней частью назад под действием пружины 172 для отвода зубчатой передачи, но до действия рычага 200 против обратного хода. Поперечными пальцами 202, 204 маятника 200 против обратного хода сопряжены соответственно правая и левая половины 84, 86 корпуса 88 рукоятки. Выше пальцев 202, 204 установлена пружина 206 против обратного хода, прикрепленная к выполненному за одно целое пальцу 208 правой половины корпуса 88 в дистальном направлении от маятника 200 против обратного хода. Нижняя лапка 210 (см. Фиг.5) маятника 200 против обратного хода находится во фрикционном контакте с верхней поверхностью 212 жесткой зубчатой рейки 170. Когда нижнюю лапку 210 маятника 200 против обратного хода оттягивают в проксимальном направлении посредством жесткой зубчатой рейки 170, рычаг 200 против обратного хода приближается к положению перпендикулярного сопряжения с жесткой зубчатой рейкой 170, в результате чего увеличивается сила трения, запирая жесткую зубчатую рейку 170, которой достаточно, чтобы преодолеть силу, оттягивающую назад, сообщаемую пружиной 172 для отвода зубчатой передачи. Когда жесткую зубчатую рейку 170 перемещают в дистальном направлении посредством курка 34 для выталкивания, нижняя лапка 210 отжимается в дистальном направлении, уменьшая трение и обеспечивая возможность выполнения операции выталкивания. Чрезмерное перемещение вперед нижней лапки 210 предотвращают посредством холостой оси 158 и воздействием со стороны пружины растяжения 206 против обратного хода.
Высвобождающая кнопка 38 (см. Фиг.12) установлена с возможностью поворота вверх относительно ее задних поворотных осей 220, 222, и при этом ее дистальный рычаг 224 поднимается над расположенным в проксимальном направлении рычагом 226 маятника 200 против обратного хода, предоставляя возможность перемещения в дистальном направлении нижней лапки 210 для запирания зубчатой рейки 170 между ходами выталкивания. Зажимной запирающий рычаг 230 установлен с возможностью качания относительно его поперечных поворотных осей 232, 234 для осуществления этого подъема высвобождающей кнопки 38. В частности, выступающее в проксимальном направлении и вверх плечо 236 зажимного запирающего рычага 230 упирается с возможностью скольжения в нижнюю поверхность рычага 224, ориентированного в дистальном направлении, высвобождающей кнопки 38. Выступающее в дистальном направлении запирающее плечо 238 зажимного запирающего рычага 230 запирает закрывающую обойму 96 в зажатом состоянии. В частности, язычок 240, выступающий вниз между выступающим в проксимальном направлении и вверх плечом 236 и выступающим в дистальном направлении запирающим плечом 238, понуждают к повороту в проксимальном направлении посредством пружины растяжения 242, которая также присоединена к пальцу 244, установленному на правой половине 84 корпуса 88 рукоятки. Выступающее в дистальном направлении запирающее плечо 238 (см. Фиг.6, 7) лежит на уступе 246, выполненном сверху на проксимальной части закрывающей обоймы 96 так, чтобы его можно было перемещать в дистальном направлении для передачи закрывающего движения. Выемка 248 для зажимного запирания, открытая в дистальном направлении и сверху в уступе 246, принимает выступающее в дистальном направлении запирающее плечо 238, когда закрывающая обойма 96 достигает ее дистального положения в приведенном в действие состоянии (см. Фиг.8, 9). Таким образом хирург может высвободить курок 26 для закрывания при том, что рабочий орган 12 остается сжатым.
Помимо упомянутых выше возможностей противодействия обратному ходу и фиксации зажима предусмотрена возможность блокировки выталкивания посредством блокировочного рычага 250 (см. Фиг.5-8, 12). Когда хирургический инструмент 10 для наложения скобок и разрезания находится в его исходном раскрытом состоянии и при отсутствии выталкивания, рычаг 250 блокировки выталкивания реагирует на закрывающую обойму 96, которая находится в оттянутом положении, блокируя выталкивающее перемещение в дистальном направлении жесткой зубчатой рейки 170, как это показано на Фиг.7 и 8. Рычаг 250 блокировки выталкивания содержит выступающее в направлении отдаления плечо 252, содержащее наклонную в дистальном направлении верхнюю поверхность 254, которая совмещена с правой кромкой 256 проксимальной части жесткой зубчатой рейки 170. Имеющая паз правая кромка 258 вдоль остальной дистальной части жесткой зубчатой рейки 170 позволяет наклонной в дистальном направлении верхней поверхности 254 рычага 250 блокировки выталкивания поворачиваться вверх, поворачиваясь относительно своих проксимальных поперечных осей 260, 262, под воздействием пружины растяжения 264, присоединенной к вертикальному язычку 266, который расположен перпендикулярно и в проксимальном направлении прикреплен к дистально выступающему плечу 252. Другой конец пружины 264 присоединен к выполненному за одно целое пальцу 268, сформированному в правой половине 84 корпуса 88 рукоятки позади вертикального язычка 266.
Наклоненной в направлении отдаления верхней поверхностью 254 (см. Фиг.8) блокируют дистальное перемещение жесткой зубчатой рейки 170 посредством заклинивания ее с помощью верхнего уступа 270, выполненного поперек проксимального конца закрывающей обоймы 96, открытого в проксимальном направлении и сверху для приема поворачивающегося вниз выступающего в дистальном направлении плеча 252 рычага 250 блокировки выталкивания. Если закрывающую обойму 96 перемещают в дистальном направлении для закрывания рабочего органа 12, как показано на Фиг.12, то правому концу 256 жесткой зубчатой рейки 170 предоставляется возможность проходить поверх наклонной в дистальном направлении поверхности 254, которая реагирует на это перемещение выступающего в дистальном направлении плеча 252 вниз, чтобы захватить нижний уступ 272, выполненный в закрывающей обойме 96 ближе расположенного выше и более дистального уступа 270. Сопряжение рычага 250 блокировки выталкивания с нижним уступом 272 имеет положительное значение, так как при этом предотвращают отход (перемещение в проксимальном направлении) закрывающей обоймы 96 до тех пор, пока жесткая зубчатая рейка 170 не будет отведена назад. Таким образом, начало отвода выталкивающего механизма 42 благоприятно происходит до раскрывания рабочего органа 12, так как в противном случае может произойти заклинивание выталкивающего механизма 42. Кроме того, фрикционный контакт достаточной величины может существовать между нижним уступом 272 и рычагом 250 блокировки выталкивания, чтобы требовалась двухступенчатая процедура для возврата хирургического инструмента 10 для наложения скобок и разрезания в его раскрытое и отведенное состояние. В частности, когда выталкивающий механизм 42 отведен путем нажатия на высвобождающую кнопку 38, обычно требуется произвести легкое нажатие на курок 26 для закрывания, чтобы обеспечить возможность рычагу 250 блокировки выталкивания подняться в его положение блокировки выталкивания. После этого отпускание курка 26 для закрывания может быть продолжено, а рычаг 250 блокировки выталкивания будет выставлен для сопряжения с верхним уступом 270, когда закрывающую обойму 96 полностью отводят назад и таким образом рабочий орган 12 раскрывают.
Следует также иметь в виду, что зубчатая рейка 170 может быть с успехом выполнена из соединенных между собой звеньев, что позволяет часть, расположенную ближе к выталкивающему механизму 42, в изогнутом состоянии размещать внутри рукоятки, благодаря чему конструкция аппарата может быть выполнена более компактной. Такая зубчатая рейка из соединенных между собой звеньев описана более подробно в заявке на патент Свейза Джеффри С. и Шелтона IV Фредерика Э. «Хирургический инструмент для наложения скобок, содержащий выталкивающий механизм с передачей в виде зубчатой рейки из соединенных между собой звеньев», сер. № 10/673930, зарегистрированной 29 сентября 2003 г.
Неодинаковые ходы при выталкивании
Необходимость в том, чтобы курок 34 для выталкивания взаимодействовал с роторной передачей 150 выталкивающего механизма, расположенного выше по ходу от жесткой зубчатой рейки 170, предоставляет возможность дальнейшей оптимизации множества ходов выталкивания. Использование кулачкового диска 330 (см. Фиг.13) облегчает возможность выполнения неодинаковых ходов выталкивания так, что передаточное отношение может быть повышено при выполнении конкретных ходов выталкивания, что, как ожидается, позволит преодолеть повышенное сопротивление при выполнении других ходов выталкивания, выполняемых при меньшем передаточном отношении, для уменьшения количества требуемых ходов выталкивания. Кроме того, осязаемая отдача, воспринимаемая хирургом, получается более равномерной, исключаются ложные восприятия того, что произошло заклинивание или выполнен неправильный проход, когда для выполнения хода требуется большее усилие для осуществления выталкивания, чем требовалось при выполнении предшествующих ходов.
Курок 34 для выталкивания посредством оперативного взаимодействия с ведущим клином 182 взаимодействует с тремя участками 342-344 контура кулачкового диска относительно другого центра вращения, чем кулачковый диск 330, который содержит кулачковые контуры; таким образом достигают улучшенного управления вращением кулачкового диска 330 под воздействием курка 34 для выталкивания. Расстояние между участками 342-344 контура кулачкового диска, их глубина (что показано их соответствующими радиальными расстояниями R1-R3 от переднего пальца 92) и их общая форма позволяют выполнять желаемые изменения размеров ходов и передаточного отношения.
Потребность в величине усилия для выполнения выталкивания, как показано на Фиг.14-15, изменяется как функция продольного перемещения при выталкивании благодаря изменению нагрузки. Продольное перемещение при выталкивании было разделено на три хода выталкивания с одинаковой величиной перемещения (см. Фиг.14). Во время первого хода усилие росло по наклонной вверх в течение первой части хода, а затем становилось относительно постоянным при незначительном росте. Во время второго хода и при третьем ходе это некоторое увеличение требуемого усилия продолжалось, после чего происходило падение величины усилия при приближении к точке выполнения полного перемещения выталкивания. Эти изменения величины требуемого усилия определяются различными факторами, например количеством разрезаемой ткани; устанавливаемыми скобками; механическим трением, с которым сталкивается выталкивающий механизм 42 и исполнительная часть 22. Хирург чувствует, что наибольший объем выполненной работы (т.е. усилие, прикладываемое по длине перемещения) имеет место во время выполнения второго хода, что относится к области 2, которая больше соседних областей 1 и 3. Если величина требуемого усилия слишком высока для предполагаемой части хирургов, то могут быть востребованы дополнительные ходы для этой равномерно выталкивающей роторной передачи 150 выталкивающего механизма.
Для благоприятного регулирования величины продольного перемещения при выталкивании между ходами используют неодинаковые выталкивающие ходы, что показано концом первого хода в т. D*1 (см. Фиг.15), где это значение больше, чем в т. D1 на Фиг.14, и при втором ходе в т. D*2, где это значение меньше, чем в т. D2 на Фиг.14. Количество работы, требующееся от хирурга во время выполнения каждого хода, приблизительно одинаковое, что ведет к исключению превышения силы руки некоторых хирургов. Кроме того, хирург с меньшей вероятностью склонен ошибочно интерпретировать тактильную обратную связь, ощущаемую хирургом, обладающим средней силой, что при выполнении каждого хода ему кажется, что он прикладывает более постоянные усилия. В частности, хотя это не изображено, следует иметь в виду, что если необходимо перемещение на более короткое расстояние во время хода 2, это означает, что увеличенное передаточное отношение используется для уменьшения мгновенного усилия выталкивания, которое ощущает пользователь, нажимая на курок для выталкивания.
Иллюстративная роторная передача выталкивающего механизма 42 описана с акцентированием достижения преимуществ за счет неодинаковых ходов при выталкивании для оптимизации перемещения в зависимости от требуемого усилия; однако следует иметь в виду, что решение, в котором используют линейное соединение для преобразования движения курка выталкивающего механизма в продольное выталкивающее движение, может также быть выгодным при неодинаковых ходах выталкивания. На Фиг.16 приведено изображение прямолинейной зубчатой рейки 400, содержащей неравномерно отстоящие друг от друга зубцы 402, 404, 406. Более конкретно, на дистальном участке 402 зубчатой рейки три изображенных зубца имеют малую длину в продольном направлении. На среднем участке 404 зубчатой рейки три изображенных зубца имеют среднюю длину в продольном направлении. На проксимальном участке 406 зубчатой рейки три изображенных зубца имеют большую длину в продольном направлении.
Таким образом, собачка 408, которую толкают вперед и вниз посредством шарнирного соединения 410 верхней части 412 курка 414 выталкивающего механизма, стремится к сопряжению с заданным зубцом в входе выталкивания, когда она контактирует с зубцами проксимального участка 406 зубчатой рейки, затем - с зубцами дистального участка 402 зубчатой рейки. Передаточное отношение и степень сжатия руки хирурга во время зацепления собачки 408 с прямолинейной зубчатой рейкой 400, таким образом изменяются в зависимости от длины зубца рейки в каждой секции 402, 404, 406.
Применение неодинаковых ходов выталкивания осуществлено в выталкивающем механизме 430 (см. Фиг.17) с зубчатой рейкой, состоящей из соединенных между собой звеньев, как это описано более подробно в рассматриваемой одновременно заявке на патент США Свейза Джеффри С. и Шелтона IV Фредерика Э., озаглавленной «Хирургический инструмент для наложения скобок, содержащий исполнительный механизм с передачей в виде зубчатой рейки из соединенных между собой звеньев», сер. № 10/673930. В этом примере длина наклонного паза 432, 434, 436 различна в трех звеньях 438, 440, 442, из которых состоит зубчатая рейка 444, выполненная в виде соединенных между собой звеньев.
В приводе 500 (см. Фиг.18) со стопором по типу двери-ширмы применяют неодинаковые ходы выталкивания, используя конический выталкивающий шток 502, который сопряжен со стопорной пластиной 504, выполненной по типу двери-ширмы и имеющей ломаную форму, которую толкают вниз и вперед относительно шарнирного соединения 506, расположенного в верхней части 508 курка 510 выталкивающего механизма. Пластина 504 ломаной формы содержит выступающее в дистальном направлении плечо 512, которым связано шарнирное соединение 506 с направленной вниз пластиной 514, содержащей отверстие 516, в которое вставлен конический шток 502. Когда верхнюю часть 508 курка 510 выталкивающего механизма перемещают в дистальном направлении, чтобы произвести операцию выталкивания, выступающее плечо 512 движется в дистальном направлении. Фрикционный контакт конического штока 502 с отверстием 516 вынуждает направленное вниз плечо 514 поворачивать пластину 504 ломаной формы, выполненную по типу двери-ширмы, верхней частью вперед, вынуждая отверстие 516 больше не скользить вдоль конического штока 502, а вместо этого входить в зацепление с ним, понуждая конический стержень 502 перемещаться в дистальном направлении и вызывать выталкивание. Диаметром конического штока 502 таким образом определяют величину поворота пластины 504 ломаной формы верхней стороной вперед до того, как произойдет зацепление.
Таким образом, в каждом из этих вариантов исполнения, в которых элементы типа собачек (см. Фиг.16-18), связанные с курком выталкивающего механизма, сопрягаются с прямолинейной частью зубчатой рейки выталкивающего механизма, изменение расстояния между зубцами приводит в результате к неодинаковым ходам и позволяет исключить ситуацию, при которой выталкивающий механизм сопрягается с курком выталкивающего механизма ближе к его наиболее ослабленному положению, когда требуется приложение большего усилия. Вместо этого путем задерживания сопряжения до тех пор, пока курок исполнительного механизма не будет подведен ближе к рукоятке инструмента пистолетного типа, обеспечивают возможность того, что количество работы (усилие, прилагаемое при прохождении расстояния), затраченной во время заданного хода, может быть сопоставимо с другими ходами. Кроме того, сила может быть приложена тогда, когда пусковой курок выталкивания механизма будет ближе к рукоятке пистолетного типа, где вообще сила руки больше. Кроме того, соотношение относительного перемещения по дуге верхней части пускового курка выталкивания и продольного перемещения в дистальном направлении зубчатой рейки также изменяется в зависимости от того, когда собачка войдет в зацепление с зубчатой рейкой.
При использовании аппарата хирург подводит рабочий орган 12 и вал 18 через канюлю троакара к месту выполнения операции, располагает матрицу 14 и удлиненный канал 16, приставляя губки для захвата ткани, которую надлежит сшивать и разрезать. Когда хирург удовлетворен расположением рабочего органа 12, он полностью прижимает курок 26 для закрывания к рукоятке 36 пистолетного типа рукоятки 20, понуждая закрывающую тягу 102 перемещать закрывающую обойму 96 и таким образом закрывающую трубку 24, чтобы закрыть рабочий орган 12. При перемещении в дистальном направлении закрывающей обоймы 96 открывается выемка 248 для запирания зажима, в которую входит рычаг 230 для запирания зажима, закрывая рабочий орган 12. Нажимая много раз на курок 34 для выталкивания, производят выталкивание выталкивающего штока 32 путем последовательного сопряжения ведущего клина 182, который соединен с курком 34 для выталкивания, с кулачковыми контурами 342-234 кулачкового диска 330. Это прерывистое вращение преобразуется посредством роторной передачи 150 выталкивающего механизма в перемещение в дистальном направлении жесткой зубчатой рейки 170. При сдвинутой закрывающей обойме 96 зубчатая рейка 170 может отжать рычаг 250 блокировки выталкивания так, чтобы убрать его с пути. Между ходами выталкивания маятник 100 против обратного хода оттягивают и вводят в запорный контакт в перпендикулярном положении с зубчатой рейкой 170, противодействуя отводящей назад силе, сообщаемой пружиной 172 для отвода зубчатой передачи, соединенной с кулачком-шестерней 330. Когда осуществлен полный ход выталкивания, нажатием на высвобождающую кнопку 38, во-первых, выводят из зацепления маятник 100 против обратного хода, позволяя зубчатой рейке 170 отойти назад, и, во-вторых, выводят из зацепления рычаг 230 для запирания зажима из закрывающей обоймы 96 для удаления одного препятствия для открывания рабочего органа 12. Хирург сжимает закрывающую обойму 96, позволяя рычагу 250 блокировки выталкивания высвободиться от закрывающей обоймы 96, и высвобождает курок 26 для закрывания, позволяя закрывающей обойме 96 перемещаться в направлении приближения к месту, где она удерживает рычаг 250 блокировки выталкивания, чтобы блокировать жесткую зубчатую рейку 170 от выполнения выталкивания. После этого исполнительная часть 22 хирургического инструмента 10 для сшивания и разрезания аппарата может быть удалена, например, для замены обоймы 62 со скобками для подготовки другой операции.
Хотя настоящее изобретение было проиллюстрировано путем описания нескольких вариантов исполнения и хотя проиллюстрированные варианты исполнения были описаны достаточно подробно, авторы заявки не намерены ограничивать объем прилагаемой формулы изобретения этими деталями. Дополнительные усовершенствования и модификации могут быть вполне предложены специалистами в данной области. Следует иметь в виду, что термины «проксимальный» и «дистальный» использованы здесь с учетом того, что врач держит рукоятку аппарата. Таким образом, рабочий орган 12 является дистальным относительно проксимально расположенной рукоятки 20. Следует также иметь в виду, что для удобства и ясности термины, используемые для ориентации в пространстве, например «вертикальный» и «горизонтальный», здесь употребляли с учетом расположения на чертежах. Однако хирургические аппараты при их использовании занимают различные положения, и эти термины не предназначены для ограничения и безусловного приложения.
Настоящее изобретение рассмотрено в терминах эндоскопических процедур и аппаратов. Однако использование здесь терминов, таких как «эндоскопический», не следует сводить к ограничению настоящего изобретения хирургическим инструментом для наложения и разрезания скобок, для использования только в связи с эндоскопической трубкой (т.е. троакаром). Напротив, есть уверенность в том, что настоящее изобретение может найти применение в любых процедурах, где ограничен доступ к маленьким разрезам, включая, но не ограничивая область применения, лапароскопические процедуры, а также процедуры на открытых участках тела пациента.
Например, хотя здесь описан хирургический инструмент 10 для наложения скобок и разрезания, которым можно выполнять отдельно и четко действия по закрыванию и выталкиванию, он тем не менее обладает клинической гибкостью. Однако следует иметь в виду, что в применениях, соответствующих настоящему изобретению, может быть использована рукоятка, с помощью которой можно преобразовать единичное действие пользователя в выталкивающее движение, при котором происходит закрывание и обеспечивается выталкивание.
Кроме того, хотя проиллюстрирована рукоятка, приводимая в действие вручную, может быть с успехом создана механизированная или другим способом приводимая в действие рукоятка при введении зубчатой рейки из соединенных между собой звеньев, как это описано здесь, обеспечивая возможность уменьшения размера рукоятки или другие преимущества. Например, хотя частично размещение зубчатой рейки из соединенных между собой звеньев в рукоятке пистолетного типа удобно, следует иметь в виду, что шарнирное соединение между звеньями позволяет разместить звено параллельно прямой части, определенной валом и барабаном рукоятки.






Изобретение относится к медицине и может быть использовано для наложения скобок и разрезания тканей при выполнении эндоскопических процедур. Инструмент содержит рукоятку, с помощью которой выполняют отдельно движения закрывания и выталкивания для приведения в действие рабочего органа. В частности, посредством рукоятки можно выполнять множество ходов для уменьшения величины требуемого усилия для рабочего органа (для осуществления наложения скобок и разрезания). Изменяя положение центра вращения, окружную длину и глубину контура кулачкового диска, который взаимосвязан с курком для выталкивания посредством ведущего клина, можно оптимизировать процесс. Изменение передаточного отношения во время выполнения конкретных ходов выталкивания позволяет смягчить увеличенное усилие при выталкивании в рабочем органе, обеспечивая возможность более равномерного восприятия усилия, прилагаемого к курку для выталкивания. В результате инструмент оптимизирует усилие и длину хода при каждом ходе. 2 н. и 17 з.п. ф-лы, 18 ил.
1. Хирургический инструмент, содержащий:
- концевой рабочий орган, выполненный так, чтобы он реагировал на движение выталкивания;
- вал, соединенный с концевым рабочим органом и содержащий удлиненный выталкивающий элемент, соединенный с концевым рабочим органом для сообщения ему движения в продольном направлении для передачи выталкивающего движения;
- рукоятку, присоединенную с проксимальной стороны к валу, содержащую:
- кулачковый элемент, содержащий множество кулачковых контуров, причем, по меньшей мере, один из кулачковых контуров отличается по форме от смежных кулачковых контуров;
- привод выталкивания, подвижный в направлении выталкивания и в обратном направлении, причем ему придана конфигурация для взаимодействия с соответствующим кулачковым контуром во время каждого хода выталкивания;
- механизм выталкивания, реагирующий на прерывистое движение кулачкового диска для передачи продольного выталкивающего движения к концевому рабочему органу.
2. Хирургический инструмент по п.1, в котором кулачковый элемент содержит кулачковый диск, содержащий множество кулачковых контуров, по меньшей мере, на части окружности, причем, по меньшей мере, один из кулачковых контуров отличается по форме от смежного кулачкового контура.
3. Хирургический инструмент по п.2, в котором рукоятка дополнительно содержит клин, соединенный с приводом выталкивания, причем ему придана конфигурация для последовательного сопряжения с соответствующим одним из множества кулачковых контуров во время каждого перемещения привода выталкивания в направлении выталкивания.
4. Хирургический инструмент по п.2, в котором рукоятка дополнительно содержит зубчатую рейку, соединенную с выталкивающим элементом вала и связанную зубчатым зацеплением с кулачковым диском для преобразования прерывистого вращения кулачкового диска в продольное выталкивающее движение.
5. Хирургический инструмент по п.4, в котором зубчатая рейка связана зубчатым зацеплением с кулачковым диском, содержащим зубчатую передачу.
6. Хирургический инструмент по п.5, в котором зубчатая передача содержит систему шестерен, посредством которой преобразуют прерывистое вращение кулачкового диска в увеличенное перемещение в продольном направлении зубчатой рейки.
7. Хирургический инструмент по п.1, дополнительно содержащий механизм против обратного хода, которому придана конфигурация для предотвращения отхода назад зубчатой рейки между ходами привода выталкивания.
8. Хирургический инструмент по п.1, в котором рабочий орган содержит пару противоположных губок, реагирующих на закрывающее движение, и выталкивающий стержень, реагирующий на выталкивающий элемент, причем валу придана конфигурация для передачи выталкивающего движения посредством выталкивающего элемента к рабочему органу, причем рукоятка дополнительно содержит закрывающий механизм, которому придана конфигурация для выполнения закрывающего движения.
9. Хирургический инструмент по п.6, дополнительно содержащий механизм блокирования выталкивания, реагирующий на закрывающий механизм таким образом, что если не выполнено закрывание, то предотвращается перемещение зубчатой рейки.
10. Хирургический инструмент по п.7, в котором механизму блокирования выталкивания придана конфигурация, при которой в ответ на то, что зубчатая рейка, по меньшей мере, частично выталкивается, механизм блокирования выталкивания блокирует движение открывания закрывающего механизма.
11. Хирургический инструмент по п.8, в котором рукоятка дополнительно содержит запор зажима, реагирующий на закрывающее движение закрывающего механизма для запирания закрывающего механизма.
12. Хирургический инструмент по п.6, в котором рукоятка дополнительно содержит:
- механизм блокирования выталкивания, реагирующий на закрывающий механизм таким образом, что если не выполнено закрывание, то предотвращается перемещение зубчатой рейки, и реагирующий на зубчатую рейку таким образом, что если зубчатая рейка была, по меньшей мере, частично вытолкнута, механизм блокирования выталкивания блокирует движение раскрывания закрывающего механизма;
- механизм запора зажима, реагирующий на закрывающее движение закрывающего механизма для запирания закрывающего механизма;
- механизм против обратного хода, которому придана конфигурация для предотвращения отхода назад зубчатой рейки между ходами привода выталкивания;
- высвобождающий механизм, которому придана такая конфигурация, чтобы разблокировать механизм против обратного хода.
13. Хирургический инструмент по п.10, в котором высвобождающему механизму дополнительно придана такая конфигурация, чтобы разблокировать механизм запора зажима.
14. Хирургический инструмент по п.6, в котором рабочему органу придана такая конфигурация, чтобы осуществлять наложение скобок и разрезание ткани во время выталкивания.
15. Хирургический инструмент по п.1, в котором рукоятка дополнительно содержит рукоятку пистолетного типа, а механизм выталкивания содержит изгибаемую зубчатую рейку, размещаемую в рукоятке пистолетного типа, когда ее отводят назад.
16. Хирургический инструмент, содержащий:
- концевой рабочий орган, выполненный так, чтобы он реагировал на движение выталкивания;
- вал, соединенный с концевым рабочим органом и содержащий удлиненный выталкивающий элемент, соединенный с концевым рабочим органом для сообщения ему движения в продольном направлении для передачи выталкивающего движения;
- рукоятку, присоединенную с проксимальной стороны к валу, содержащую:
- линейный выталкивающий элемент, прикрепленный проксимально для увеличения длины выталкивающего элемента вала;
- привод выталкивания, подвижный в направлении выталкивания и в обратном направлении, реагирующий на воздействие пользователя;
- запирающий элемент, функционально расположенный для поворота в ответ на движение в каждом направлении привода выталкивания для выборочного соединения выталкивающего движения вперед привода выталкивания с линейным выталкивающим элементом.
17. Хирургический инструмент по п.16, в котором запирающий элемент содержит собачку, соединенную с возможностью поворота с приводом выталкивания, и кулачковый зубчатый механизм, соединенный с возможностью поворота с рукояткой и функционально предназначенный реагировать на действие собачки.
18. Хирургический инструмент по п.16, в котором запирающий элемент содержит собачку, линейный выталкивающий элемент содержит зубчатую рейку, установленную с возможностью зацепления с собачкой во время ее перемещения вперед.
19. Хирургический инструмент по п.17, в котором линейный выталкивающий элемент содержит зубчатую рейку, состоящую из соединенных между собой звеньев.
| US 6330965 В1, 18.12.2001 | |||
| US 4596350 А, 24.06.1986 | |||
| US 5326013 А, 05.07.1994 | |||
| Хирургический сшивающий аппарат | 1983 |
|
SU1183082A1 |
| US 5330502 А, 19.07.1994. | |||

