Изобретение относится к авиационной технике, а именно к системам управления поворотом стойки шасси самолета, и может быть использовано в следящих дистанционных системах управления, в которых установлены датчики, формирующие электрические сигналы в зависимости от изменения положения управляющего элемента для передачи этих сигналов в блок управления.
Известно устройство для управления датчиком системы управления поворота стойки шасси самолета ИЛ-86 (Руководство по технической эксплуатации самолета ИЛ-96, раздел 032.50.00, с.4, рис.2, Авиационный комплекс им. С.В.Ильюшина, М. 1988), содержащее установленные в кронштейнах вертикальные приводные колонки, каждая из которых в верхней части через коническую, зубчатую передачу соединена с горизонтальным выдвижным валом, снабженным штурвальчиком, в средней части колонки кинематически соединены между собой для обеспечения синхронности поворота штурвальчиков, одна из колонок соединена с центрирующим цилиндром, закрепленным на кронштейне.
Конструкция известного устройства многодетальна, имеет большие габариты и вес, что приводит к увеличению люфтов в конструкции и в результате к снижению надежности работы устройства из-за понижения эффективности передачи сигнала от штурвальчика к валу датчика. Кроме того, воспроизведение линейной зависимости между углом поворота штурвальчика и углом поворота вала датчика приводит к излишне высокой чувствительности управления поворотом при малых углах поворота штурвальчика, в результате чего летчику трудно установить при рулении небольшие углы поворота колес.
Технической задачей является повышение удобства управления самолетом на режиме руления путем уменьшения чувствительности системы управления при повороте передней опоры самолета на малые углы.
Решение технической задачи достигается тем, что устройство для управления валом датчика системы управления поворотом стойки шасси самолета содержит установленный в корпусе выдвижной вал со штурвальчиком, соединенный через зубчатую передачу с приводным элементом, соединенные через промежуточный механизм с валом датчика системы управления, причем приводной элемент выполнен с приводным валом, промежуточный механизм выполнен нелинейным и входное звено его, неподвижно установленное на приводном валу, соединено с выходным через двуплечую качалку, соединенную с ними с возможностью поступательного перемещения, приводной вал выполнен с рычагом, шарнирно соединенным с центрирующим цилиндром.
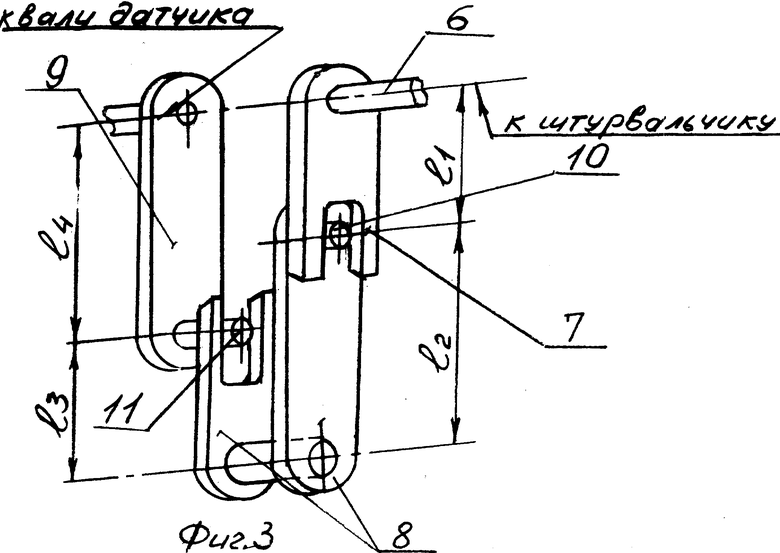
На фиг.1 изображено устройство в разрезе, общий вид; на фиг. 2 вид А на фиг. 1; на фиг.3 упрощенная схема промежуточного нелинейного механизма; на фиг. 4 графики зависимости между углами поворота штурвальчика и вала системы управления при линейной и нелинейной передачах.
Устройство содержит корпус 1, в котором установлен выдвижной вал 2 со штурвальчиком 3, на валу 2 установлена шестерня 4, которая находится в зацеплении с колесом 5 приводного вала 6, установленного в корпусе 1 и соединенного с поводком 7, являющимся входным звеном промежуточного нелинейного механизма, содержащего двуплечую промежуточную качалку 8, шарнирно соединенную с поводком 7 и выходным рычагом 9 соответственно через цапфы 10 и 11, размещенные с возможностью перемещения в пазах, выполненных в поводке 7 и в одном из плеч качалки 8. При этом выходной рычаг 9 через пластину 12 жестко соединен с валом 13 датчика 14 системы управления, электрически связанным с агрегатом управления 15. Кроме того, на приводном валу 6 при помощи болта 16 закреплен рычаг 17, шарнирно соединенный с центрирующим цилиндром 18, другой конец которого шарнирно закреплен на корпусе 1.
Устройство работает следующим образом.
Исходя из требований экипажа, выбирают участок графика зависимости (фиг. 4) угла поворота штурвальчика 3 и угла поворота вала 13 датчика 14 в заданном диапазоне. В соответствии с этим графиком подбирают длины плеч l1, l2, l3 и l4 (фиг. 3) промежуточной качалки 8. При этом в нейтральном положении точка касания цапфы 10 качалки 8 и поводка 7 находится на минимальном расстоянии l1 от оси приводного вала 6, точка касания цапфы 11 выходного рычага 9 находится от оси вращения качалки 8 на минимальном расстоянии l3.
При передаче движения с приводного вала 6 на поводок 7 и далее на качалку 8 и выходной рычаг 9 цапфы 10 и 11 перемещаются в пазах качалок 7 и 8, при этом соотношение длин плеч качалки 8 изменяется, а именно: длина плеч l1 и l3 увеличивается, а длина плеч l2 и l4 остается постоянной. Причем в первой половине диапазона углов большему углу α поворота штурвальчика 3 соответствует меньшее значение угла v поворота вала 13 датчика 14, чем при использовании передаточного механизма, воспроизводящего линейную зависимость между этими углами, что позволяет летчику в начале режима руления эффективно управлять самолетом при повороте колес на малые углы. Во второй половине диапазона меньшему углу a поворота штурвальчика 3 соответствует больший угол v поворота вала 13 датчика 14, чем при использовании механизма, воспроизводящего линейную зависимость между этими углами, но при больших углах поворота стойки шасси это не уменьшает эффективности управления самолетом.
При отпускании штурвальчика 3 центрирующий цилиндр 18 через рычаг 17, приводной вал 6 и зубчатое зацепление 4 и 5 возвращает вал 2 со штурвальчиком 3 в нейтральное положение, при этом качалка 8, рычаг 9, а следовательно, и вал 14 также займут нейтральное положение.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ПЕРЕДНЕЙ ОПОРОЙ ШАССИ САМОЛЕТА | 1992 |
|
RU2070140C1 |
| СИЛОВОЙ ЗАМОК ШАССИ САМОЛЕТА | 1993 |
|
RU2068799C1 |
| Командный блок устройства управления передней опорой шасси самолета (варианты) | 2018 |
|
RU2695967C1 |
| УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ ВАЛА ДАТЧИКА С ПОВОРОТНЫМ ЭЛЕМЕНТОМ ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА | 1993 |
|
RU2068798C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПЕРЕДНЕЙ ОПОРОЙ ШАССИ САМОЛЕТА | 2009 |
|
RU2395428C1 |
| ГРУЗОВАЯ КАБИНА ЛЕТАТЕЛЬНОГО АППАРАТА ДЛЯ ПЕРЕВОЗКИ ГРУЗА В КОНТЕЙНЕРАХ | 1995 |
|
RU2092386C1 |
| КОМАНДНЫЙ ПОСТ РУЧНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1996 |
|
RU2122509C1 |
| УСТРОЙСТВО ДЛЯ ОТКРЫТИЯ КРЫШКИ ЛЮКА | 1995 |
|
RU2104217C1 |
| Переключатель режимов управления передней опорой шасси самолета (варианты), узел переключателя и силовой каркас переключателя | 2018 |
|
RU2695942C1 |
| УБИРАЮЩЕЕСЯ ШАССИ ЛЕТАТЕЛЬНОГО АППАРАТА | 1995 |
|
RU2088478C1 |


Использование: изобретение относится к авиационной технике, а именно к системам управления поворотом стойки шасси самолета. Сущность изобретения: устройство для управления валом датчика системы управления поворотом стойки шасси самолета содержит корпус, в котором установлен выдвижной вал со штурвальчиком, на валу установлена шестерня, которая находится в зацеплении с колесом приводного вала, установленного в корпусе и соединенного с поводком, являющимся входным звеном промежуточного нелинейного механизма, содержащего двуплечую качалку, шарнирно соединенную с поводком и выходным рычагом через цапфы, размещенные с возможностью перемещения в пазах, выполненных в поводке, выходной рычаг через пластину жестко соединен с валом датчика системы управления, электрически соединенным с агрегатом управления. 4 ил.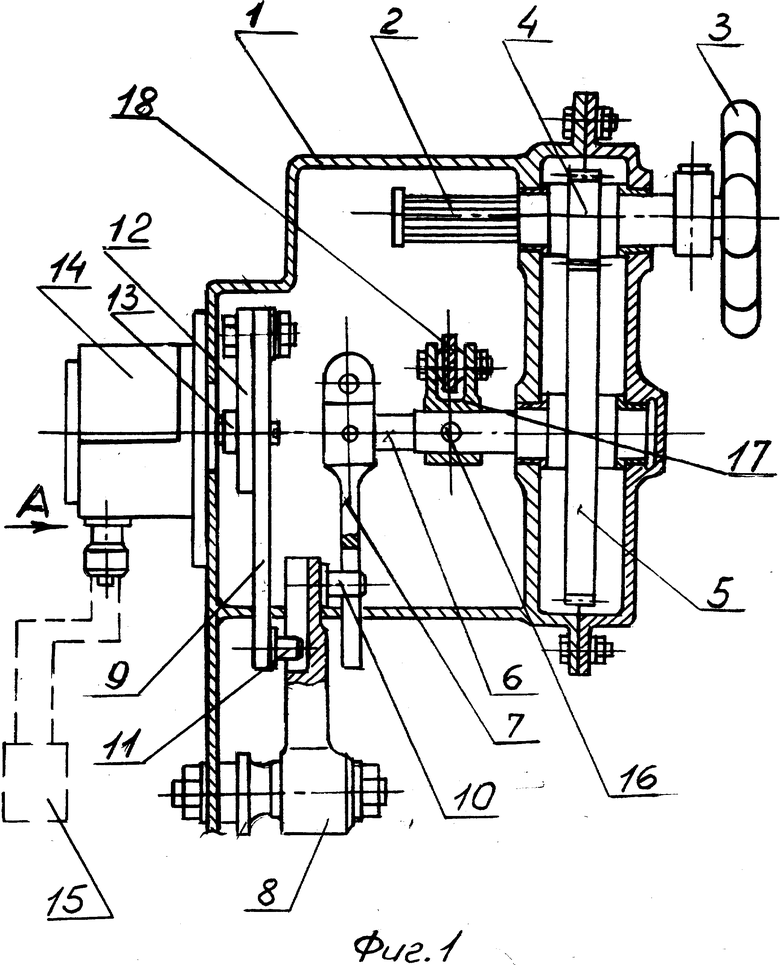
Устройство для управления валом датчика системы управления поворотом стойки шасси самолета, содержащее установленный в корпусе выдвижной вал с штурвальчиком, соединенный через зубчатую передачу с приводным элементом, соединенным через промежуточный механизм с валом датчика системы управления, отличающееся тем, что приводной элемент выполнен с приводным валом, промежуточный механизм выполнен нелинейным и входное звено его, неподвижно установленное на приводном валу, соединено с выходным через двуплечую качалку, соединенную с ними с возможностью поступательного перемещения, приводной вал выполнен с рычагом, шарнирно соединенным с центрирующим цилиндром.
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| - М., 1988. | |||
