Изобретение относится к области авиации, в частности к системам управления рулежным устройством передней опоры шасси самолета, и предназначено для управления движением самолета на взлете, посадке и рулении по аэродрому.
Известна система управления передней опорой шасси самолета (см. Руководство по летной эксплуатации самолета Ил-86. - М.: Издательство ОКБ им. С.В.Ильюшина, 1976, раздел 10, с.5 и 6, рис.10 и 10-2), содержащая штурвалы управления самолетом с трехпозиционными переключателями режимов работ системы управления рулежным устройством, установленные по левому и правому бортам кабины рукоятки системы управления рулежным устройством, соединенные через редукторы между собой жесткой механической проводкой, командные датчики для режима «взлет-посадка» под педалями и для режима «руление», связанные с рукоятками управления, датчики обратной связи на передней опоре, связанные с поворотной частью опоры, упомянутые выше редукторы для изменения передаточного отношения от рукояток к валам командных датчиков для режима «руление», центрирующий пружинный цилиндр, механически связанный с рукоятками, для возврата их и валов датчиков для режима «руление» в нейтральное положение, электронные блоки управления, электрическими связями соединенные с датчиками и электрогидравлическими агрегатами, подающими гидрожидкость в полости цилиндров рулежного устройства передней опоры, упоры на редукторе и колонке, жестко связанной с рукояткой левого летчика для ограничения угла поворота ручки.
При использовании этой системы летчику требуется помнить, в каком положении находится трехпозиционный переключатель, чтобы при необходимости переключить систему в режим «руление», «взлет-посадка» или выключить. При выполнении скоротечных процессов взлета, посадки, руления велика вероятность ошибки, что может привести к аварийным ситуациям, тем самым снижается безопасность полетов. Кроме того, наличие двух редукторов, по одному под каждой ручкой, а также изменение передаточного отношения от рукояток к валам командных датчиков для режима «руление» в двух местах, в редукторах и соединении валов датчиков с проводкой между рукоятками, приводят к усложнению системы, увеличению ее веса и габаритов.
Известна также система управления передней опорой шасси самолета (см. патент РФ №2070140, кл. B64C 25/50), содержащая штурвалы управления самолетом с установленными на них двухпозиционными переключателями для выключения системы и включения в режим «взлет-посадка», установленные по правому и левому бортам кабины рукоятки, через редукторы жесткой механической проводкой соединенные между собой и с центрирующим пружинным цилиндром, возвращающим рукоятки в нейтральное положение, педали управления, также кинематически связанные между собой и с входными валами командных датчиков для режима «взлет-посадка», командные датчики для режима «руление», редукторы для изменения передаточного отношения от рукояток к валам командных датчиков для режима «руление». Система также содержит кулачковый механизм переключения режимов «взлет-посадка»-«руление» и наоборот, кинематически связанный с колонкой одной из рукояток управления и имеющий концевые выключатели, соединенные через две параллельные цепи включения с переключателями, установленными на штурвалах левого и правого летчиков, и механизм подключения командных датчиков для режима «руление», кинематически связанный с колонкой другой рукоятки управления, которая соединена также с механизмом центрирования валов командных датчиков для режима «руление», содержащим дополнительный центрирующий пружинный цилиндр, установленную шарнирно на колонке и соединенную с дополнительным центрирующим пружинным цилиндром качалку с зубчатым сектором, тяги, соединенные с зубчатым сектором и с рычагами на валах датчиков, электронные блоки управления, электрическими связями соединенные с датчиками и электрогидравлическими агрегатами, подающими гидрожидкость в полости цилиндров рулежного устройства передней опоры.
К причинам, препятствующим достижению указанного ниже технического результата, относится то, что на штурвалах управления самолетом установлены двухпозиционные переключатели для включения системы управления рулежным устройством в режим «взлет-посадка», после приземления самолета и выключения системы управления рулежным устройством после взлета самолета, чтобы колеса не поворачивались в отсеках шасси при перемещении педалей. Летчику необходимо помнить, в каком состоянии находиться система и осуществлять выключение и включение системы при взлете и посадке, что снижает безопасность полетов.
Размещение блока концевых выключателей, кулачкового механизма для управления их срабатыванием, редуктора для изменения передаточного отношения от рукояток к валам командных датчиков режима «руление», центрирующего пружинного цилиндра для возврата рукояток в нейтральное положение, дополнительного пружинного цилиндра для центрирования валов датчиков, отдельно расположенных агрегатов, кинематически соединенных между собой, требует много места на самолете для их размещения, увеличивает вес системы, усложняет их установку, регулировку и обслуживание в эксплуатации, снижает надежность работы системы.
Установка упоров, ограничивающих поворот рукояток, только на одной стороне на редукторе приводит к нагружению всей проводки от правого летчика до левого летчика, усилием правого летчика при повороте рукоятки правым летчиком до крайнего положения, что ведет к увеличению веса проводки.
Задачей данного изобретения является устранение указанных недостатков, а именно уменьшение габаритов и веса устройства, упрощение конструкции, повышение удобства и снижение времени обслуживания устройства, повышение надежности его работы.
Поставленная задача достигается тем, что в устройстве управления передней опорой шасси самолета, содержащем установленные по правому и левому бортам кабины рукоятки, механически связанные между собой, командные датчики под педалями и рукояткой, механически связанные с педалями и рукоятками, концевые выключатели, центрирующий пружинный цилиндр, механически связанный с рукоятками, а также механизм центрирования вала командного датчика под рукояткой, согласно изобретению редуктор, концевые выключатели, центрирующий пружинный цилиндр рукояток, механизм центрирования вала командного датчика под рукояткой размещены в одном блоке с одним входным и двумя выходными элементами, при этом входной элемент, выполненный в виде колонки, жестко соединяется с шестерней редуктора и с рукояткой, один выходной элемент, являющийся продолжением колонки входного элемента, кинематически связан с рукояткой по другому борту, второй выходной элемент соединен с валом командного датчика, а механизм центрирования вала командного датчика в нейтральном положении выполнен в виде двух подпружиненных качалок и дополнительного упора между ними, установленного на корпусе редуктора, кроме того, кинематическое соединение между рукоятками по левому и правому бортам выполнено в виде тросовой проводки.
Установка агрегатов в едином блоке требует меньше места для их размещения, уменьшает общий вес устройства управления передней опорой шасси, позволяет вести монтаж агрегатов в блоке вне самолета в производственном помещении, тем самым повышается удобство монтажа, качество сборки, надежность работы. Готовый блок устанавливается на самолет.
Сущность изобретения поясняется чертежами:
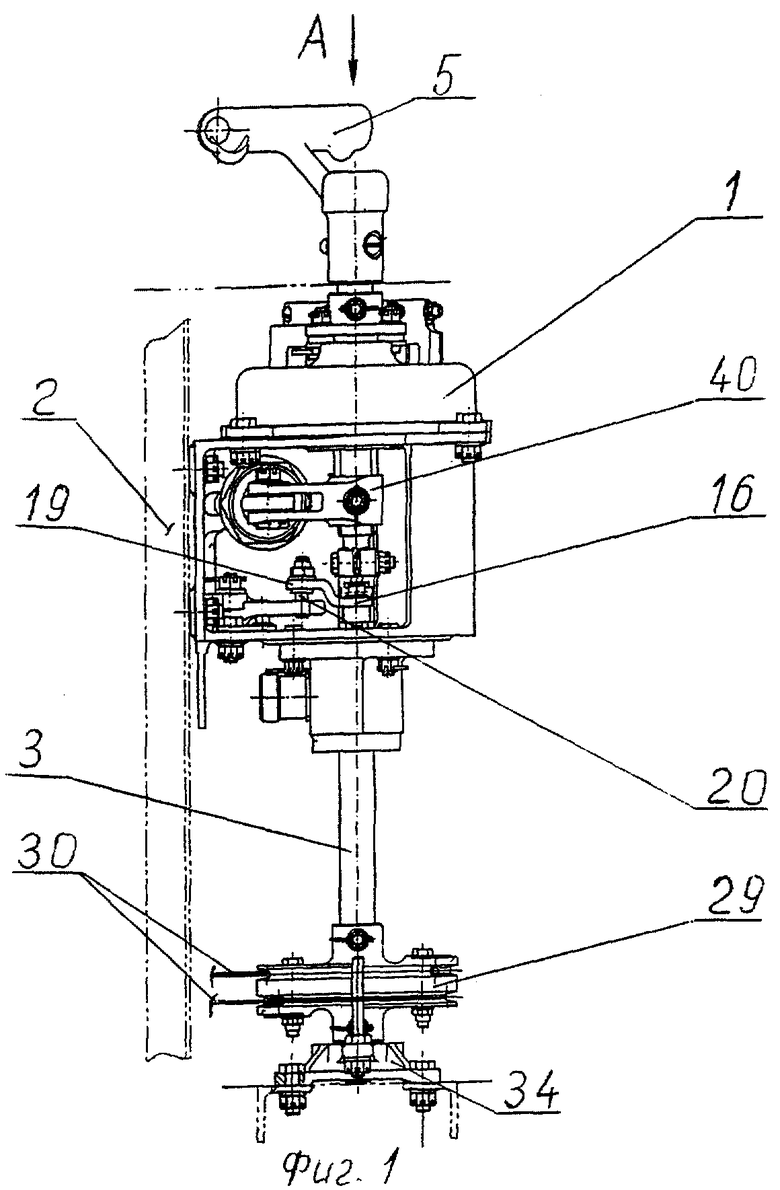
на фиг.1 показан вид против полета на установку рукоятки управления по левому борту;
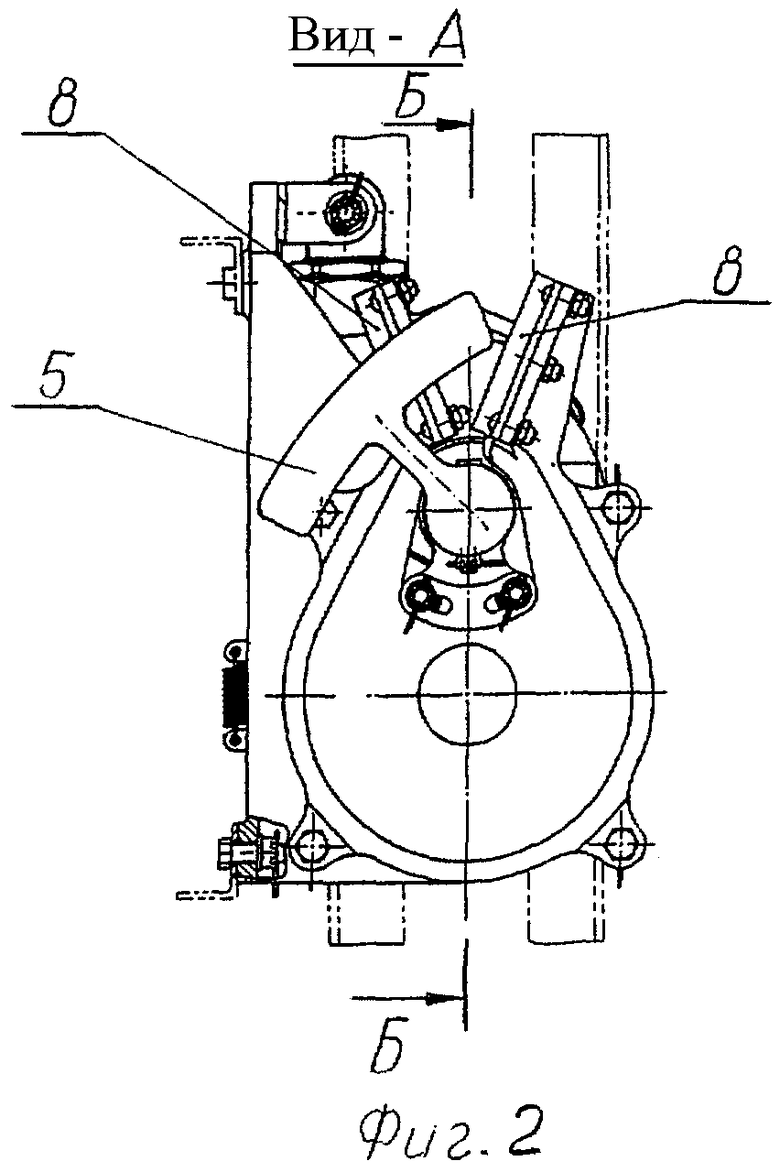
на фиг.2 - вид А фиг.1;
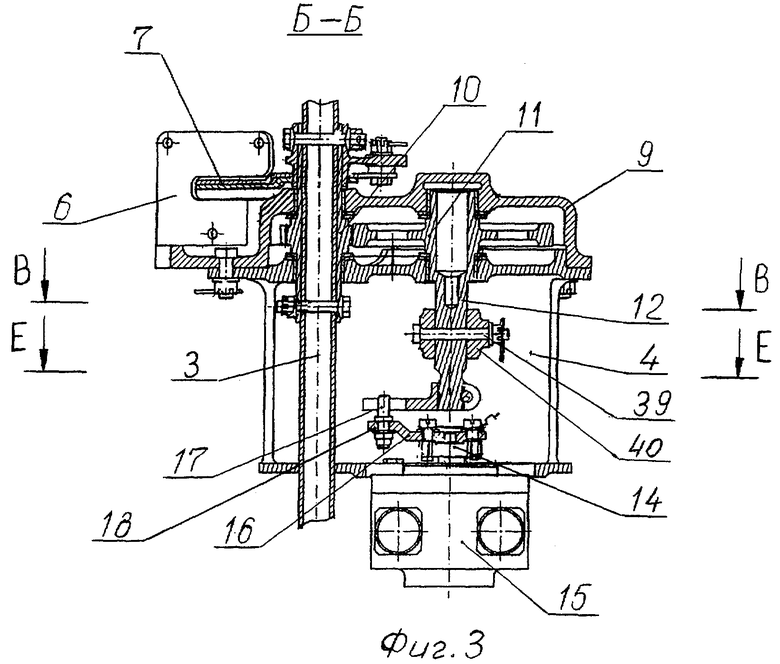
на фиг.3 - разрез Б-Б фиг.2;
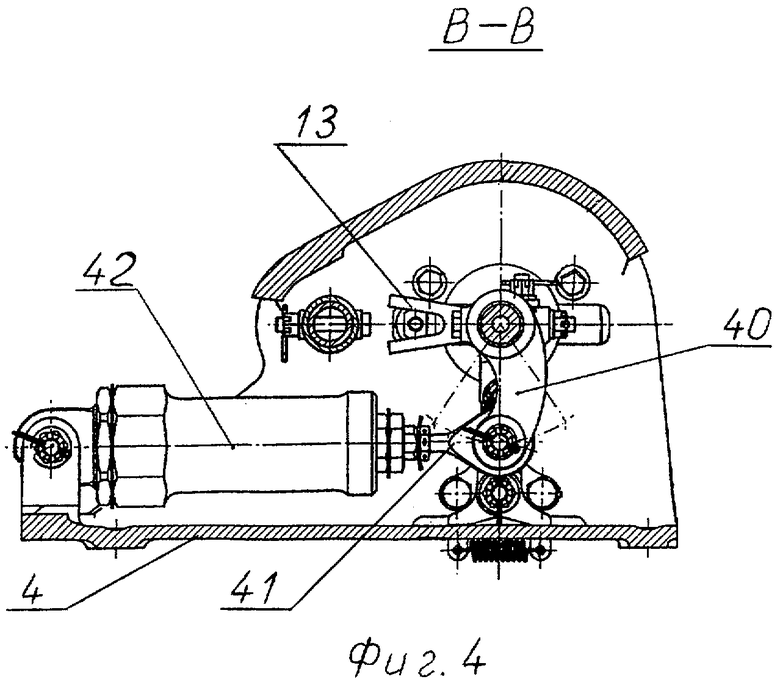
на фиг.4 - разрез В-В фиг.3;
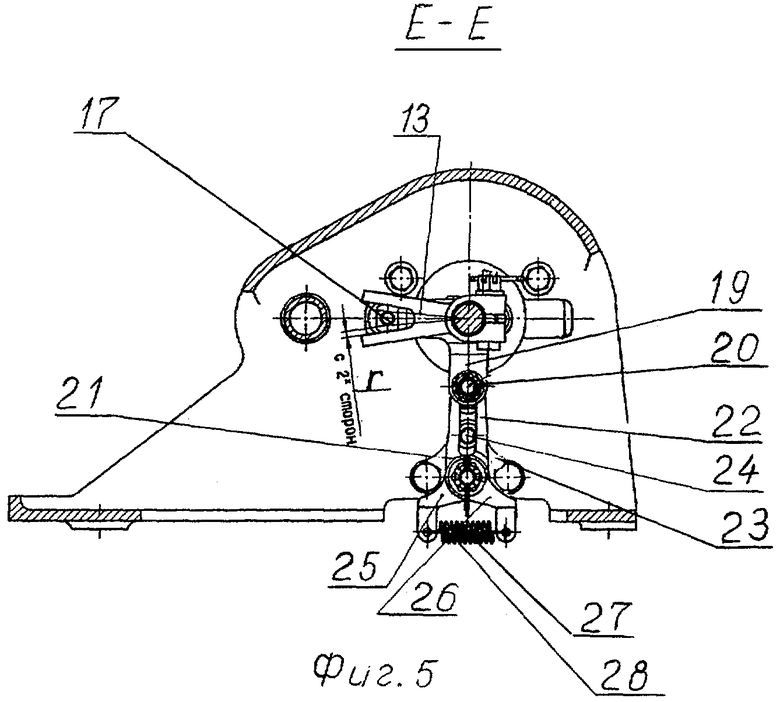
на фиг.5 - разрез Е-Е фиг.3;
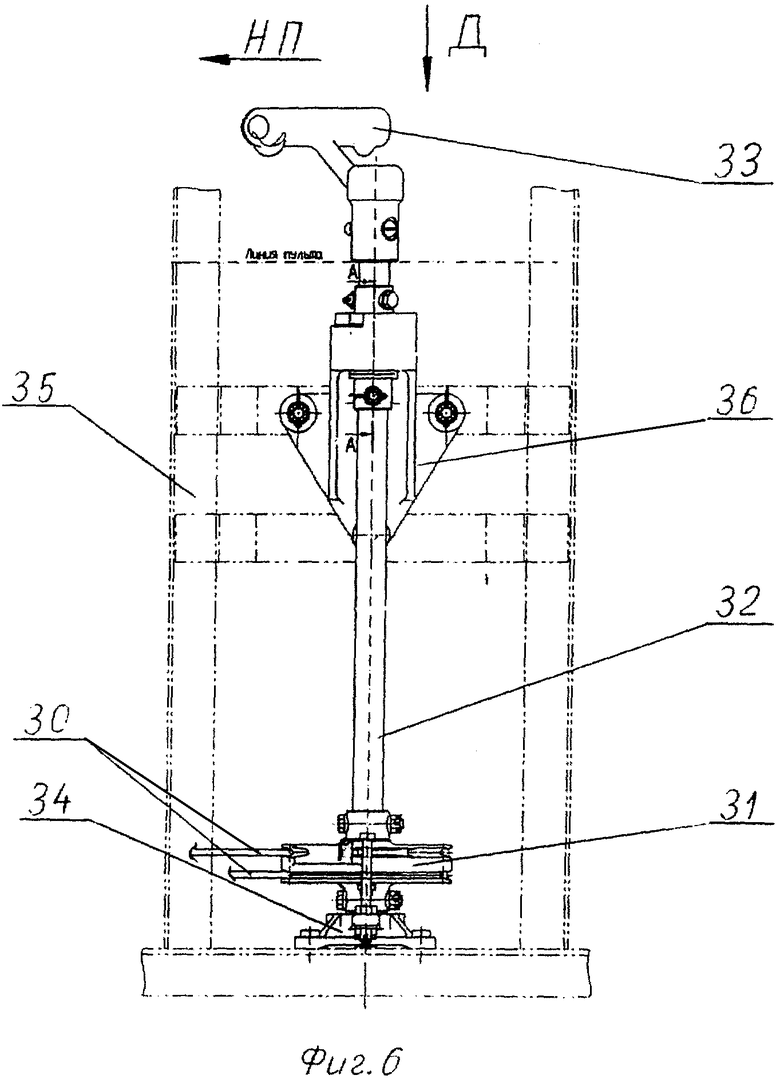
на фиг.6 - установка рукоятки управления по правому борту (вид сбоку);
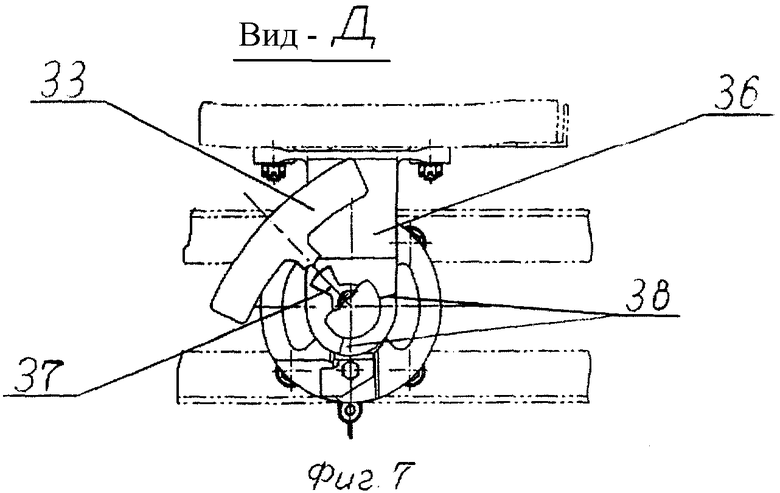
на фиг.7 - вид Д фиг.6;
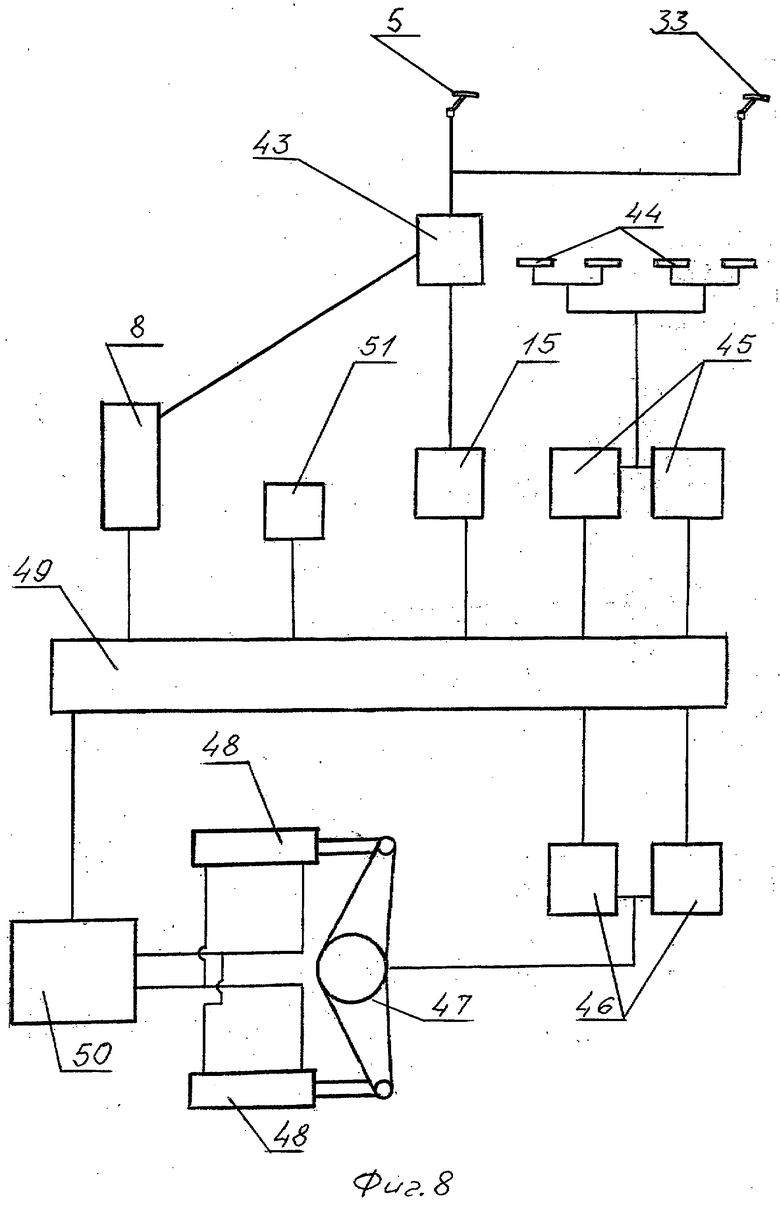
на фиг.8 - блок-схема управления передней опорой шасси самолета.
Устройство управления передней опорой шасси самолета (см. фиг.1-8) содержит цилиндрический редуктор 1 (фиг.1), расположенный по левому борту 2 (фиг.1) кабины, входной вал редуктора 1 (фиг.1) выполнен в виде колонки 3 (фиг.1, 3), установленной в корпусе 4 (фиг.3) редуктора, в верхней части ее закреплены рукоятка управления 5 (фиг.1) и механизм переключения режимов 6 (фиг.3), состоящий из шторки 7 (фиг.3) и концевых выключателей 8 (фиг.2), установленных на крышке редуктора 9 (фиг.3). На колонке 3 (фиг.3) в средней части установлена шестерня 10 (фиг.3), которая находится в зубчатом зацеплении с колесом 11 (фиг.3), выполненным заодно с выходным валом редуктора 12 (фиг.3), установленным в корпусе редуктора 4 (фиг.3) и соединенным с поводком 13 (фиг.5), имеющим центральный вырез, служащий для управления валом 14 (фиг.3) командного датчика 15 (фиг.3), через двухплечий рычаг 16 (фиг.3), закрепленный на валу 14 (фиг.3). Ось 17 (фиг.3), установленная на плече 18 (фиг.3) рычага 16 (фиг.3), входит в центральный вырез поводка 13 (фиг.5) с одинаковым зазором Г (фиг.5) со сторонами выреза, а на плече 19 (фиг.5) рычага 16 (фиг.3) закреплен валик 20 (фиг.5, 1), с которым взаимодействуют элементы механизма центрирования вала командного датчика, качалки 21 (фиг.5) и 22 (фиг.5), установленные шарнирно на кронштейне 23 (фиг.5), закрепленном на корпусе редуктора 4 (фиг.3), и имеющие упор 24 (фиг.5), закрепленный на кронштейне 23 (фиг.5), а вторые концы 25 (фиг.5) и 26 (фиг.5) качалок 21 (фиг.5) и 22 (фиг.5, 1) связаны пружинами 27 (фиг.5) и 28 (фиг.5) между собой. В нижней части колонки 3 (фиг.1) установлен ролик 29 (фиг.1), который тросовой проводкой 30 (фиг.1, 6) связан с роликом 31 (фиг.6) на колонке 32 (фиг.6) по правому борту 35 (фиг.6). В верхней части колонки 32 (фиг.6) закреплена рукоятка управления 33 (фиг.6), а сама колонка 32 (фиг.6) шарнирно установлена в кронштейне 34 (фиг.6), установленном на полу по правому борту 35 (фиг.6) кабины, также и нижний конец колонки 3 (фиг.1) шарнирно установлен в другом кронштейне 34 (фиг.1), закрепленном на полу по левому борту кабины. С другой стороны колонка 32 (фиг.6) шарнирно установлена в кронштейне 36 (фиг.6), закрепленном на конструкции правого борта 35 (фиг.6) кабины, и имеет упор 37 (фиг.7), ограничивающий поворот рукоятки управления 33 (фиг.6) между упорами 38 (фиг.7) на кронштейне 36 (фиг.7). Кроме того, на валу 12 (фиг.3) при помощи болта 39 (фиг.3) закреплен рычаг 40 (фиг.3, 4), шарнирно соединенный с наконечником 41 (фиг.4) центрирующего пружинного цилиндра 42 (фиг.4), а крышка цилиндра 42 (фиг.4) закреплена на корпусе редуктора 4 (фиг.4).
Блок-схема управления передней опорой шасси самолета содержит устройство управления поворотом 43 (фиг.8), включающее в себя рукоятки управления 5, 33 (фиг.8), концевые выключатели 8 (фиг.8), командный датчик для режима «Руление» 15 (фиг.8), далее педали 44 (фиг.8) с командными датчиками для режима «Взлет-посадка» 45 (фиг.8), датчики обратной связи 46 (фиг.8), кинематически связанные с поворотной частью передней опоры 47 (фиг.8), рулежные цилиндры 48 (фиг.8), блок управления 49 (фиг.8), электрогидравлический агрегат управления 50 (фиг.8) по командам блока управления, подающий гидрожидкость в рулежные цилиндры, двухпозиционный выключатель 51 (фиг.8) для включения системы в режим «взлет-посадка» и выключения системы, размещенный на одной из приборных панелей в кабине.
Работа устройства. Система управления передней опорой шасси двухпозиционным выключателем 51 включается в режим «взлет-посадка». Для управления самолетом при рулении на земле (ВПП) поворачивают одну из рукояток управления 5 или 33, при этом колонки 3 и 32 поворачиваются. Вместе с колонкой 3 поворачиваются шторка 7 и включает контакты концевых выключателей 8, которые переключают систему в режим «Руление», также поворачивается шестерня 10, которая через зубчатое зацепление поворачивает колесо 11 с выходным валом 12 и установленный на нем поводок 13. При повороте поводка 13 выбирается зазор Г, необходимый для включения концевых выключателей 8 и переключения системы в режим «руление», поводок 13 начинает перемещать ось 17, которая через плечо 18 поворачивает рычаг 16 и связанный с рычагом 16 вал 14 датчика 15, электрический сигнал с него подается в блок управления 49, который формирует команду для электрогидравлического агрегата управления 50, подающего гидрожидкость в гидроцилиндры 48 рулежного устройства передней опоры. Валиком 20, установленным на плече 19 рычага 16, поворачиваются качалки 21 или 22 (в зависимости от направления поворота рукоятки) и растягивают соединенные с ними пружины 27 и 28. Одновременно с поворотом выходного вала 12 через рычаг 40 включается в работу соединенный с ним центрирующий пружинный цилиндр 42, служащий для возвращения рукояток 5, 33 в нейтральное положение при снятии с них нагрузки. При этом возвращение вала 14 датчика 15 в нейтральное положение происходит за счет поворота валиком 20 и пружинами 27, 28 качалок 21 или 22 до касания качалками 21 или 22 упора 24. Одновременно с поворотом рукоятки управления 3 происходит поворот ролика 29 и через тросовую проводку 30 поворот ролика 31 вместе с соединенными с ним колонкой 32 и рукояткой управления 33. Ограничителями при повороте рукоятки управления 3 служат упоры внутри центрирующего пружинного цилиндра 42.
При управлении поворотом колес стойки передней опоры от рукоятки 33 через колонку 32 и закрепленный на ней ролик 31 тросовой проводкой 30 вращение передается на ролик 29 и колонку 3 и далее управление поворотом осуществляется так же, как от рукоятки 5. При повороте рукоятки 33 в крайние положения упор 37 доходит до упора 38 в кронштейне 36, тем самым предохраняется тросовая проводка от избыточного усилия при работе правого летчика.
При повороте рукоятки управления 5 вправо-влево на полный угол, ограниченный упорами в центрирующем пружинном цилиндре 42, между упором 37 и упорами 38 на кронштейне 36 остаются зазоры, благодаря чему тросовая проводка не нагружается от избыточного усилия левого летчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| Командный блок устройства управления передней опорой шасси самолета (варианты) | 2018 |
|
RU2695967C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПЕРЕДНЕЙ ОПОРОЙ ШАССИ САМОЛЕТА | 1992 |
|
RU2070140C1 |
| Переключатель режимов управления передней опорой шасси самолета (варианты), узел переключателя и силовой каркас переключателя | 2018 |
|
RU2695942C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТОМ КОЛЕС ПЕРЕДНЕЙ ОПОРЫ ШАССИ | 1992 |
|
RU2042575C1 |
| СПОСОБ ВИЗУАЛЬНОЙ ПОСАДКИ И УСТРОЙСТВО КИРИЛЛОВА ВИЗУАЛЬНОГО ОБЕСПЕЧЕНИЯ ВЗЛЕТА ИЛИ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2475424C1 |
| МНОГОЦЕЛЕВОЙ ВЫСОКОМАНЕВРЕННЫЙ СВЕРХЗВУКОВОЙ САМОЛЕТ, ЕГО АГРЕГАТЫ ПЛАНЕРА, ОБОРУДОВАНИЕ И СИСТЕМЫ | 1996 |
|
RU2207968C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ ФАР ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2009056C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВАЛОМ ДАТЧИКА СИСТЕМЫ УПРАВЛЕНИЯ ПОВОРОТОМ СТОЙКИ ШАССИ САМОЛЕТА | 1992 |
|
RU2097271C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ САМОЛЕТА ПЕРЕД ВЗЛЕТОМ | 2011 |
|
RU2463567C1 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
Изобретение относится к области авиации, в частности к системам управления рулежным устройством передней опоры шасси самолета. Устройство управления передней опорой шасси самолета содержит установленные по правому и левому бортам кабины рукоятки, механически связанные между собой, командные датчики под педалями и рукояткой, механически связанные с педалями и рукоятками. Также устройство содержит концевые выключатели, центрирующий пружинный цилиндр, механически связанный с рукоятками, а также механизм центрирования вала командного датчика под рукояткой. Редуктор, концевые выключатели, центрирующий пружинный цилиндр рукояток, механизм центрирования вала командного датчика под рукояткой размещены в одном блоке с одним входным и двумя выходными элементами. При этом входной элемент выполнен в виде колонки, жестко соединенной с шестерней редуктора и с рукояткой, один выходной элемент, являющийся продолжением колонки входного элемента, кинематически связан с рукояткой по другому борту, второй выходной элемент соединен с валом командного датчика. Механизм центрирования вала командного датчика в нейтральном положении выполнен в виде двух подпружиненных качалок и упора между ними, установленного на корпусе редуктора, кроме того, кинематическое соединение между рукоятками по левому и правому бортам выполнено в виде тросовой проводки. Технический результат направлен на уменьшение габаритов и веса устройства, упрощение конструкции и повышение надежности работы устройства. 8 ил.
Устройство управления передней опорой шасси самолета, содержащее установленные по правому и левому бортам кабины рукоятки, механически связанные между собой, командные датчики под педалями и рукояткой, механически связанные с педалями и рукоятками, концевые выключатели, центрирующий пружинный цилиндр, механически связанный с рукоятками, а также механизм центрирования вала командного датчика под рукояткой, отличающееся тем, что редуктор, концевые выключатели, центрирующий пружинный цилиндр рукояток, механизм центрирования вала командного датчика под рукояткой размещены в одном блоке с одним входным и двумя выходными элементами, при этом входной элемент выполнен в виде колонки, жестко соединенной с шестерней редуктора и с рукояткой, один выходной элемент, являющийся продолжением колонки входного элемента, кинематически связан с рукояткой по другому борту, второй выходной элемент соединен с валом командного датчика, а механизм центрирования вала командного датчика в нейтральном положении выполнен в виде двух подпружиненных качалок и упора между ними, установленного на корпусе редуктора, кроме того, кинематическое соединение между рукоятками по левому и правому бортам выполнено в виде тросовой проводки.
| СИСТЕМА УПРАВЛЕНИЯ ПЕРЕДНЕЙ ОПОРОЙ ШАССИ САМОЛЕТА | 1992 |
|
RU2070140C1 |
| SU 1834191 A1, 20.09.1996 | |||
| US 4172571 A, 30.10.1979 | |||
| US 4948069 А, 14.08.1990. | |||

